

-
摘要: 视频跟踪是计算机视觉的重要组成部分,可在智能交通、医疗诊断等实际应用中发挥重要作用.近年来,相关滤波器凭借精度高、速度快的优势,逐步发展为视频跟踪方法的主要研究方向之一,可以很好地处理多种视频跟踪难题.随着基于相关滤波器的视频跟踪系列方法被相继提出,算法设计趋于完善,跟踪效果也趋于精准.本文从不同角度总结了多种具有代表性的相关滤波跟踪方法,分析了各种方法的发展进程,并预测了未来可能的发展方向.Abstract: Visual tracking is an important part of computer vision, which plays a key role in practical applications such as intelligent transportation, medical diagnosis and so on. In recent years, correlation filter has been developed into a main direction of visual tracking methods due to its high precision and fast speed, as well as the ability to handle a variety of tracking challenges. With various correlation filter based tracker being proposed, the tracking algorithm design tends to be perfect, tracking effects tend to be accurate. This paper summarizes several representative correlation filter based tracking methods from different points of view, analyzes the development process of the method, and predicts its possible future development.
-
Key words:
- Visual tracking /
- correlation filter /
- model training /
- ridge regression
1) 本文责任编委 赖剑煌 -
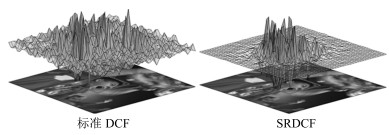
图 2 加入惩罚正则项前后相关滤波系数对比示意图
Fig. 2 Schematic diagram of correlation filtering coefficients before and after adding penalty regular
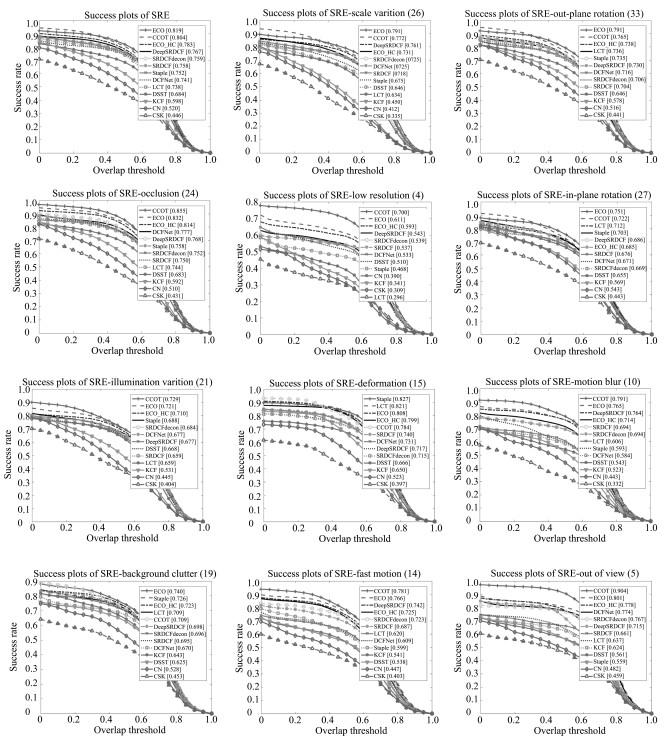
图 3 各种基于相关滤波跟踪方法成功率对比曲线图
Fig. 3 Various success ratio comparison curve based on correlation filter tracking methods
-
[1] 张铁, 马琼雄.人机交互中的人体目标跟踪算法.上海交通大学学报, 2015, 49(8):1213-1219 http://d.old.wanfangdata.com.cn/Periodical/shjtdxxb201508021Zhang Tie, Ma Qiong-Xiong. Human object tracking algorithm for human-robot interaction. Journal of Shanghai Jiao Tong University, 2015, 49(8):1213-1219 http://d.old.wanfangdata.com.cn/Periodical/shjtdxxb201508021 [2] Pantrigo J J, Hernández J, Sánchez A. Multiple and variable target visual tracking for video-surveillance applications. Pattern Recognition Letters, 2010, 31(12):1577-1590 doi: 10.1016/j.patrec.2010.04.017 [3] 权义萍, 杨道业.基于视频检测的卡尔曼滤波车辆跟踪算法及行为分析.北京工业大学学报, 2014, 40(7):1110-1113 http://d.old.wanfangdata.com.cn/Periodical/bjgydxxb201407026Quan Yi-Ping, Yang Dao-Ye. Kalman filter vehicle tracking algorithm and behaviour analysis based on video detection. Journal of Beijing University of Technology, 2014, 40(7):1110-1113 http://d.old.wanfangdata.com.cn/Periodical/bjgydxxb201407026 [4] Yang G, Zhao J S, Zheng C H, Fan Y. An approach based on mean shift and background difference for moving object tracking. In: Proceedings of the 6th International Conference on Wireless Communications Networking and Mobile Computing. Chengdu, China: IEEE, 2010. 1-4 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=5600705 [5] Horn B K P, Schunck B G. Determining optical flow. Artificial Intelligence, 1981, 17(1-3):185-203 doi: 10.1016/0004-3702(81)90024-2 [6] Nam H, Han B. Learning multi-domain convolutional neural networks for visual tracking. In: Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, NV, USA: IEEE, 2016. 4293-4302 http://ieeexplore.ieee.org/document/7780834/ [7] Bertinetto L, Valmadre J, Henriques J F, Vedaldi A, Torr P H S. Fully-convolutional siamese networks for object tracking. In: Proceedings of the 2016 European Conference on Computer Vision. Amsterdam, Netherlands: Springer, 2016. 850-865 doi: 10.1007/978-3-319-48881-3_56 [8] Wang L J, Ouyang W L, Wang X G, Lu H C. STCT: sequentially training convolutional networks for visual tracking. In: Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, NV, USA: IEEE, 2016. 1373-1381 [9] Danelljan M, Bhat G, Khan F S, Felsberg M. ECO: efficient convolution operators for tracking. In: Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, HI, USA: IEEE, 2017. 6931-6939 [10] Hong Z B, Chen Z, Wang C H, Mei X, Prokhorov D, Tao D C. MUlti-store tracker (MUSTer): a cognitive psychology inspired approach to object tracking. In: Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA, USA: IEEE, 2015. 749-758 http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=7298675 [11] Valmadre J, Bertinetto L, Henriques J, Vedaldi A, Torr P H S. End-to-end representation learning for correlation filter based tracking. In: Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, HI, USA: IEEE, 2017. 5000-5008 http://www.researchgate.net/publication/320971954_End-to-End_Representation_Learning_for_Correlation_Filter_Based_Tracking [12] Zhang J M, Ma S G, Sclaroff S. MEEM: robust tracking via multiple experts using entropy minimization. In: Proceedings of the 13th European Conference on Computer Vision. Zurich, Switzerland: Springer, 2014. 188-203 doi: 10.1007/978-3-319-10599-4_13 [13] Possegger H, Mauthner T, Bischof H. In defense of color-based model-free tracking. In: Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA, USA: IEEE, 2015. 2113-2120 [14] Adankon M M, Cheriet M. Support vector machine. Computer Science, 2002, 1(4):1-28 http://d.old.wanfangdata.com.cn/Periodical/wlhxxb201705012 [15] Bolme D S, Beveridge J R, Draper B A, Lui Y M. Visual object tracking using adaptive correlation filters. In: Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition. San Francisco, CA, USA: IEEE, 2010. 2544-2550 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=5539960 [16] Henriques J F, Caseiro R, Martins P, Batista J. Exploiting the circulant structure of tracking-by-detection with kernels. In: Proceedings of the 12th European Conference on Computer Vision. Florence, Italy: Springer, 2012. 702-715 [17] Henriques J F, Caseiro R, Martins P, Batista J. High-speed tracking with kernelized correlation filters. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 37(3):583-596 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c8f7e9e032e4e419c5c79d7a5f1f6494 [18] Danelljan M, Khan F S, Felsberg M, van de Weijer J. Adaptive color attributes for real-time visual tracking. In: Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus, OH, USA: IEEE, 2014. 1090-1097 http://ieeexplore.ieee.org/document/6909539/ [19] Bertinetto L, Valmadre J, Golodetz S, Miksik O, Torr P H S. Staple: complementary learners for real-time tracking. In: Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, NV, USA: IEEE, 2016. 1401-1409 [20] Danelljan M, Häger G, Khan F, Felsberg M. Accurate scale estimation for robust visual tracking. In: Proceedings of the 2014 British Machine Vision Conference. Michel, Canada: BMVA Press, 2014. 1-65 [21] Danelljan M, Häger G, Khan F S, Felsberg M. Discriminative scale space tracking. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(8):1561-1575 doi: 10.1109/TPAMI.2016.2609928 [22] Zhang M D, Xing J L, Gao J, Hu W M. Robust visual tracking using joint scale-spatial correlation filters. In: Proceedings of the 2015 IEEE International Conference on Image Processing. Quebec City, QC, Canada: IEEE, 2015. 1468-1472 [23] Zhang M D, Xing J L, Gao J, Shi X C, Wang Q, Hu W M. Joint scale-spatial correlation tracking with adaptive rotation estimation. In: Proceedings of the 2015 IEEE International Conference on Computer Vision Workshop. Santiago, Chile: IEEE, 2015. 595-603 http://ieeexplore.ieee.org/xpl/articleDetails.jsp?reload=true&arnumber=7406430 [24] Ma C, Yang X K, Zhang C Y, Yang M H. Long-term correlation tracking. In: Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA, USA: IEEE, 2015. 5388-5396 [25] Danelljan M, Häger G, Khan F S, Felsberg M. Learning spatially regularized correlation filters for visual tracking. In: Proceedings of the 2015 IEEE International Conference on Computer Vision. Santiago, Chile: IEEE, 2015. 4310-4318 [26] Danelljan M, Häger G, Khan F S, Felsberg M. Convolutional features for correlation filter based visual tracking. In: Proceedings of the 2015 IEEE International Conference on Computer Vision Workshop. Santiago, Chile: IEEE, 2015. 621-629 [27] Wang Q, Gao J, Xing J L, Zhang M D, Hu W M. DCFNet: discriminant correlation filters network for visual tracking. arXiv: 1704.04057. 2017. [28] Danelljan M, Häger G, Khan F S, Felsberg M. Adaptive decontamination of the training set: a unified formulation for discriminative visual tracking. In: Proceedings of the 2016 IEEE Conference on Computer Vision and pattern Recognition. Las Vegas, NV, USA: IEEE, 2016. 1430-1438 [29] Danelljan M, Robinson A, Khan F S, Felsberg M. Beyond correlation filters: learning continuous convolution operators for visual tracking. In: Proceedings of the 14th Computer Vision. Amsterdam, Netherlands: Springer, 2016. 472-488 [30] Yi W, Lim J, Yang M H. Online object tracking: a benchmark. In: Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition. Portland, OR, USA: IEEE, 2013. 2411-2418 [31] Kristan M, Leonardis A, Matas J, Felsberg M, Pflugfelder R, Ćuehovin L, et al. The visual object tracking vot2016 challenge results. In: Proceedings of the 2016 European Conference on Computer Vision. Amsterdam, Netherlands: Springer, 2016. 777-823 [32] Nam H, Baek M, Han B. Modeling and propagating CNNs in a tree structure for visual tracking. arXiv: 1608.07242. 2016. -

 下载:
下载:



图(4)
计量
- 文章访问数: 2680
- HTML全文浏览量: 815
- PDF下载量: 1285
- 被引次数: 0
