

-
摘要: 介绍高速列车故障诊断的研究意义,特别关注高速列车信息控制系统的故障诊断研究工作,给出高速列车信息控制系统的一般性定义.高速列车信息控制系统主要包括牵引传动控制系统、制动控制系统、列车运行控制系统和网络系统.针对每一个子系统,分别阐述其故障诊断技术的研究现状,简要分析相应故障诊断技术的思想与优劣特点.最后探讨高速列车故障诊断研究中亟待解决的问题以及未来可能的研究方向.Abstract: The research significance of fault diagnosis for high-speed trains is introduced, and special attention is paid to the fault diagnosis of the high-speed train information control system. A general definition of the information control system is provided. Four subsystems are included, that is, traction drive system, brake control system, train control system, and network system. For each subsystem, the research status of fault diagnosis techniques is reviewed. The basic ideas, advantages, and disadvantages for these fault diagnosis techniques are also briefly discussed. Finally, several challenging problems and promising research directions are pointed out.
-
Key words:
- High-speed train /
- information control system /
- fault diagnosis /
- traction system /
- braking system
-
近些年来, 由于多智能体协同控制在编队控制[1]、机器人网络[2]、群集行为[3]、移动传感器[4-5]等方面的广泛应用, 多智能体系统的协同控制问题受到了众多研究者的广泛关注.一致性问题是多智能体系统协同控制领域的一个关键问题, 其目的是通过与邻居之间的信息交换, 使所有智能体的状态达成一致.迄今为止, 对多智能体一致性的研究也已取得了丰硕的成果, 根据多智能体的动力学模型分类, 主要可以将其分为以下4种情形:一阶[6-9]、二阶[10-13]、三阶[14-15]、高阶[16-18].
在实际应用中, 由于CPU处理速度和内存容量的限制, 智能体不能频繁地进行控制以及与其邻居交换信息.因此, 事件触发控制策略作为减少控制次数和通信负载的有效途径, 受到了越来越多的关注.到目前为止, 对事件触发控制机制的研究也取得了很多成果[19-23].Xiao等[19]基于事件触发控制策略, 解决了带有领航者的离散多智能体系统的跟踪问题.通过利用状态测量误差并且基于二阶离散多智能体系统动力学模型, Zhu等[20]提出了一种自触发的控制策略, 该策略使得所有智能体的状态均达到一致. Huang等[21]研究了基于事件触发策略的Lur$'$e网络的跟踪问题.针对不同的领航者-跟随者系统, Xu等[22]提出了3种不同类型的事件触发控制器, 包含分簇式控制器、集中式控制器和分布式控制器, 以此来解决对应的一致性问题.然而, 大多数现有的事件触发一致性成果集中于考虑一阶多智能体系统和二阶多智能体系统, 很少有成果研究三阶多智能体系统的事件触发控制问题, 特别是对于三阶离散多智能体系统, 成果更是少之又少.所以, 设计相应的事件触发控制协议来解决三阶离散多智能体系统的一致性问题已变得尤为重要.
本文研究了基于事件触发控制机制的三阶离散多智能体系统的一致性问题, 文章主要有以下三点贡献:
1) 利用位置、速度和加速度三者的测量误差, 设计了一种新颖的事件触发控制机制.
2) 利用不等式技巧, 分析得到了保证智能体渐近收敛到一致状态的充分条件.与现有的事件触发文献[19-22]不同的是, 所得的一致性条件与通信拓扑的Laplacian矩阵特征值和系统的耦合强度有关.
3) 给出了排除类Zeno行为的参数条件, 进而使得事件触发控制器不会每个迭代时刻都更新.
1. 预备知识
1.1 代数图论
智能体间的通信拓扑结构用一个有向加权图来表示, 记为.其中, $\vartheta = \left\{ {1, 2, \cdots, n} \right\}$表示顶点集, $\varsigma\subseteq\vartheta\times\vartheta$表示边集, 称作邻接矩阵, ${a_{ij}}$表示边$\left({j, i} \right) \in \varsigma $的权值.当$\left({j, i} \right) \in \varsigma $时, 有${a_{ij}} > 0$; 否则, 有${a_{ij}} = 0$. ${a_{ij}} > 0$表示智能体$i$能收到来自智能体$j$的信息, 反之则不成立.对任意一条边$j$, 节点$j$称为父节点, 节点$i$则称为子节点, 节点$i$是节点$j$的邻居节点.假设通信拓扑中不存在自环, 即对任意$i\in \vartheta $, 有${a_{ii}} = 0$.
定义$L = \left({{l_{ij}}}\right)\in{\bf R}^{n\times n}$为图${\cal G}$的Laplacian矩阵, 其中元素满足${l_{ij}} = - {a_{ij}} \le 0, i \ne j$; ${l_{ii}} = \sum\nolimits_{j = 1, j \ne i}^n {{a_{ij}} \ge 0} $.智能体$i$的入度定义为${d_i} = \sum\nolimits_{j = 1}^n {{a_{ij}}} $, 因此可得到$L = D - \Delta $, 其中, .如果有向图中存在一个始于节点$i$, 止于节点$j$的形如的边序列, 那么称存在一条从$i$到$j$的有向路径.特别地, 如果图中存在一个根节点, 并且该节点到其他所有节点都有有向路径, 那么称此有向图存在一个有向生成树.另外, 如果有向图${\cal G}$存在一个有向生成树, 则Laplacian矩阵$L$有一个0特征值并且其他特征值均含有正实部.
1.2 模型描述
考虑多智能体系统由$n$个智能体组成, 其通信拓扑结构由有向加权图${\cal G}$表示, 其中每个智能体可看作图${\cal G}$中的一个节点, 每个智能体满足如下动力学方程:
$ \begin{equation} \left\{ \begin{array}{l} {x_i}\left( {k + 1} \right) = {x_i}\left( k \right) + {v_i}\left( k \right)\\ {v_i}\left( {k + 1} \right) = {v_i}\left( k \right) + {z_i}\left( k \right)\\ {z_i}\left( {k + 1} \right) = {z_i}\left( k \right) + {u_i}\left( k \right) \end{array} \right. \end{equation} $
(1) 其中, ${x_i}\left(k \right) \in \bf R$表示位置状态, ${v_i}\left(k \right) \in \bf R$表示速度状态, ${z_i}\left(k \right) \in \bf R$表示加速度状态, ${u_i}\left(k \right) \in \bf R$表示控制输入.
基于事件触发控制机制的控制器协议设计如下:
$ \begin{equation} {u_i}\left( k \right) = \lambda {b_i}\left( {k_p^i} \right) + \eta {c_i}\left( {k_p^i} \right) + \gamma {g_i}\left( {k_p^i} \right), k \in \left[ {k_p^i, k_{p + 1}^i} \right) \end{equation} $
(2) 其中, $\lambda> 0$, $\eta> 0$, $\gamma> 0$表示耦合强度,
$ \begin{align*}&{b_i}\left( k \right)= \sum\nolimits_{j \in {N_i}} {{a_{ij}}\left( {{x_j}\left( k \right) - {x_i}\left( k \right)} \right)} , \nonumber\\ &{c_i}\left( k \right)=\sum\nolimits_{j \in {N_i}} {{a_{ij}}\left( {{v_j}\left( k \right) - {v_i}\left( k \right)} \right)}, \nonumber\\ & {g_i}\left( k \right)=\sum\nolimits_{j \in {N_i}} {{a_{ij}}\left( {{z_j}\left( k \right) - {z_i}\left( k \right)} \right)} .\end{align*} $
触发时刻序列定义为:
$ \begin{equation} k_{p + 1}^i = \inf \left\{ {k:k > k_p^i, {E_i}\left( k \right) > 0} \right\} \end{equation} $
(3) ${E_i}\left(k \right)$为触发函数, 具有以下形式:
$ \begin{align} {E_i}\left( k \right)= & \left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|- {\delta _2}{\beta ^k} - \nonumber\nonumber\\ &{\delta _1}\left| {{b_i}\left( {k_p^i} \right)} \right| - {\delta _1}\left| {{c_i}\left( {k_p^i} \right)} \right| - {\delta _1}\left| {{g_i}\left( {k_p^i} \right)} \right| \end{align} $
(4) 其中, ${\delta _1} > 0$, ${\delta _2} > 0$, $\beta > 0$, , ${e_{ci}}\left(k \right) = {c_i}\left({k_p^i} \right) - {c_i}\left(k \right)$, ${e_{gi}}\left(k \right) = {g_i}\left({k_p^i} \right) - {g_i}\left(k \right)$.
令$\varepsilon _i\left(k\right)={x_i}\left(k\right)-{x_1}\left(k\right)$, ${\varphi _i}\left(k\right)={v_i}\left(k \right)-$ ${v_1}\left(k\right)$, ${\phi _i}(k) = {z_i}(k) - {z_1}\left(k \right)$, $i = 2, \cdots, n$. , $\cdots, {\varphi _n}\left(k \right)]^{\rm T}$, $\phi \left(k \right) = {\left[{{\phi _2}\left(k \right), \cdots, {\phi _n}\left(k \right)} \right]^{\rm T}}$. $\psi \left(k \right) = {\left[{{\varepsilon ^{\rm T}}\left(k \right), {\varphi ^{\rm T}}\left(k \right), {\phi ^{\rm T}}\left(k \right)} \right]^{\rm T}}$, , ${\bar e_b} = {\left[{{e_{b1}}\left(k \right), \cdots, {e_{b1}}\left(k \right)} \right]^{\rm T}}$, , ${e_{c1}}\left(k \right)]^{\rm T}$, , ${\bar e_g} = $ ${\left[{{e_{g1}}\left(k \right), \cdots, {e_{g1}}\left(k \right)} \right]^{\rm T}}$, $\tilde e\left(k \right) = [\tilde e_b^{\rm T}\left(k \right), \tilde e_c^{\rm T}\left(k \right), $ $\tilde e_g^{\rm T}\left(k \right)]^{\rm T}$, $\bar e\left(k \right) = [\bar e_b^{\rm T}\left(k \right), \bar e_c^T\left(k \right), \bar e_g^{\rm T}\left(k \right)]^{\rm T}$,
$ \hat L = \left[ {\begin{array}{*{20}{c}} {{d_2} + {a_{12}}}&{{a_{13}} - {a_{23}}}& \cdots &{{a_{1n}} - {a_{2n}}}\\ {{a_{12}} - {a_{32}}}&{{d_3} + {a_{13}}}& \cdots &{{a_{1n}} - {a_{3n}}}\\ \vdots & \vdots & \ddots & \vdots \\ {{a_{12}} - {a_{n2}}}&{{a_{13}} - {a_{n3}}}& \cdots &{{d_n} + {a_{1n}}} \end{array}} \right] $
再结合式(1)和式(2)可得到:
$ \begin{equation} \psi \left( {k + 1} \right) = {Q_1}\psi \left( k \right) + {Q_2}\left( {\tilde e\left( k \right) - \bar e\left( k \right)} \right) \end{equation} $
(5) 其中, , .
定义1.对于三阶离散时间多智能体系统(1), 当且仅当所有智能体的位置变量、速度变量、加速度变量满足以下条件时, 称系统(1)能够达到一致.
$ \begin{align*} &{\lim _{k \to \infty }}\left\| {{x_j}\left( k \right) - {x_i}\left( k \right)} \right\| = 0 \nonumber\\ & {\lim _{k \to \infty }}\left\| {{v_j}\left( k \right) - {v_i}\left( k \right)} \right\| = 0 \nonumber\\ & {\lim _{k \to \infty }}\left\| {{z_j}\left( k \right) - {z_i}\left( k \right)} \right\| = 0 \\&\quad\qquad \forall i, j = 1, 2, \cdots , n \end{align*} $
定义2.如果$k_{p + 1}^i - k_p^i > 1$, 则称触发时刻序列$\left\{ {k_p^i} \right\}$不存在类Zeno行为.
假设1.假设有向图中存在一个有向生成树.
2. 一致性分析主要结果
假设$\kappa$是矩阵${Q_1}$的特征值, ${\mu _i}$是$L$的特征值, 则有如下等式成立:
$ {\rm{det}}\left( {\kappa {I_{3n - 3}} - {Q_1}} \right)=\nonumber\\ \det \left(\! \!{\begin{array}{*{20}{c}} {\left( {\kappa - 1} \right){I_{n - 1}}}\!&\!{ - {I_{n - 1}}}\!&\!{{0_{n - 1}}}\\ {{0_{n - 1}}}\!&\!{\left( {\kappa - 1} \right){I_{n - 1}}}\!&\!{ - {I_{n - 1}}}\\ {\lambda {{\hat L}_{n - 1}}}\!&\!{\eta {{\hat L}_{n - 1}}}\!&\!{\left( {\kappa - 1} \right){I_{n - 1}} + \gamma {{\hat L}_{n - 1}}} \end{array}} \!\!\right)=\nonumber\\ \prod\limits_{i = 2}^n {\left[ {{{\left( {\kappa - 1} \right)}^3} + \left( {\lambda + \eta \left( {\kappa - 1} \right) + \gamma {{\left( {\kappa - 1} \right)}^2}} \right){\mu _i}} \right]} $
令
$ \begin{align} {m_i}\left( \kappa \right)= &{\left( {\kappa - 1} \right)^3} + \nonumber\\&\left( {\lambda + \eta \left( {\kappa - 1} \right) + \gamma {{\left( {\kappa - 1} \right)}^2}} \right){\mu _i} = 0, \nonumber\\& \qquad\qquad\qquad\qquad\qquad i = 2, \cdots , n \end{align} $
(6) 则有如下引理:
引理1[15]. 如果矩阵$L$有一个0特征值且其他所有特征值均有正实部, 并且参数$\lambda $, $\eta $, $\gamma $满足下列条件:
$ \left\{ \begin{array}{l} 3\lambda - 2\eta < 0\\ \left( {\gamma - \eta + \lambda } \right)\left( {\lambda - \eta } \right) < - \dfrac{{\lambda \Re \left( {{\mu _i}} \right)}}{{{{\left| {{\mu _i}} \right|}^2}}}\\ \left( {4\gamma + \lambda - 2\eta } \right)<\dfrac{{8\Re \left( {{\mu _i}} \right)}}{{{{\left| {{\mu _i}} \right|}^2}}} \end{array} \right. $
那么, 方程(6)的所有根都在单位圆内, 这也就意味着矩阵${Q_1}$的谱半径小于1, 即$\rho \left({{Q_1}} \right) < 1$.其中, 表示特征值${\mu _i}$的实部.
引理2[23]. 如果, 那么存在$M \ge 1$和$0 < \alpha < 1$使得下式成立
$ {\left\| {{Q_1}} \right\|^k} \le M{\alpha ^k}, \quad k \ge 0 $
定理1. 对于三阶离散多智能体系统(1), 基于假设1, 如果式(2)中的耦合强度满足引理1中的条件, 触发函数(4)中的参数满足$0 < {\delta _1} < 1$, , $0 < \alpha < \beta < 1$, 则称系统(1)能够实现渐近一致.
证明.令$\omega \left(k \right) = \tilde e\left(k \right) - \bar e\left(k \right)$, 式(5)能够被重新写成如下形式:
$ \begin{equation} \psi \left( k \right) = Q_1^k\psi \left( 0 \right) + {Q_2}\sum\limits_{s = 0}^{k - 1} {Q_1^{k - 1 - s}\omega \left( s \right)} \end{equation} $
(7) 根据引理1和引理2可知, 存在$M \ge 1$和$0 < \alpha < 1$使得下式成立.
$ \begin{align} \left\| {\psi \left( k \right)} \right\|\le & {\left\| {{Q_1}} \right\|^k}\left\| {\psi \left( 0 \right)} \right\| + \nonumber\\ & \left\| {{Q_2}} \right\|\sum\limits_{s = 0}^{k - 1} {{{\left\| {{Q_1}} \right\|}^{k - 1 - s}}\left\| {\omega \left( s \right)} \right\|}\le \nonumber\\ & M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^k}+\nonumber\\ & M\left\| {{Q_2}} \right\|\sum\limits_{s = 0}^{k - 1} {{\alpha ^{k - 1 - s}}\left\| {\omega \left( s \right)} \right\|} \end{align} $
(8) 由触发条件可得:
$ \begin{align} & \left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|\le\nonumber\\ & \qquad{\delta _1}\left| {{b_i}\left( {k_p^i} \right)} \right| + {\delta _1}\left| {{c_i}\left( {k_p^i} \right)} \right| +\nonumber\\ &\qquad {\delta _1}\left| {{g_i}\left( {k_p^i} \right)} \right| + {\delta _2}{\beta ^k}\le\nonumber\\ &\qquad {\delta _1}\left\| L \right\| \cdot \left\| {\varepsilon \left( k \right)} \right\| + {\delta _1}\left\| L \right\| \cdot \left\| {\varphi \left( k \right)} \right\| + \nonumber\\ &\qquad{\delta _1}\left\| L \right\| \cdot \left\| {\phi \left( k \right)} \right\|+ {\delta _1}\left| {{e_{bi}} \left( k \right)} \right| + \nonumber\\ &\qquad{\delta _1}\left| {{e_{ci}} \left( k \right)} \right|+ {\delta _1}\left| {{e_{gi}}\left( k \right)} \right| + {\delta _2}{\beta ^k} \end{align} $
(9) 对上式移项可求解得:
$ \begin{align} &\left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|\le \nonumber\\ &\qquad\frac{{{\delta _1}\left\| L \right\| \cdot \left\| {\varepsilon \left( k \right)} \right\|}}{{1 - {\delta _1}}} + \frac{{{\delta _1}\left\| L \right\| \cdot \left\| {\varphi \left( k \right)} \right\|}}{{1 - {\delta _1}}}{\rm{ + }}\nonumber\\ &\qquad\frac{{{\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\phi \left( k \right)} \right\| + \frac{{{\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(10) 又因为, 和, 可得出下列不等式:
$ \begin{align} &\left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|\le\nonumber\\ &\qquad \frac{{{\delta _1}\left\| L \right\|}}{{1 - {\delta _1}}} \cdot \left( {\left\| {\varepsilon \left( k \right)} \right\|{\rm{ + }}\left\| {\varphi \left( k \right)} \right\|{\rm{ + }}\left\| {\phi \left( k \right)} \right\|} \right) +\nonumber\\ &\qquad \frac{{{\delta _2}{\beta ^k}}}{{1 - {\delta _1}}}\le \frac{{3{\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\psi \left( k \right)} \right\| + \frac{{{\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(11) 接着有如下不等式成立:
$ \begin{align} \left\| {e\left( k \right)} \right\|\le \frac{{3\sqrt n {\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\psi \left( k \right)} \right\| + \frac{{\sqrt n {\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(12) 其中, , ${e_b}(k) = \left[{{e_{b1}}(k), \cdots, {e_{bn}}(k)} \right]$, ${e_c}(k) = \left[{{e_{c1}}(k), \cdots, {e_{cn}}(k)} \right]$,
注意到
$ \begin{equation} \left\| {\tilde e( k )} \right\| + \left\| {\bar e( k )} \right\| \le \sqrt {6( {n - 1} )} \left\| {e( k )} \right\| \end{equation} $
(13) 于是有
$ \begin{align} \left\| {\omega ( k )} \right\| &= \left\| {\tilde e( k ) - \bar e\left( k \right)} \right\| \le\nonumber\\ & \left\| {\tilde e\left( k \right)} \right\| + \left\| {\bar e\left( k \right)} \right\|\le\nonumber\\ & \frac{{3\sqrt {6n( {n - 1} )} {\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\psi \left( k \right)} \right\| +\nonumber\\ & \frac{{\sqrt {6n( {n - 1} )} {\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(14) 把式(14)代入式(8)可得
$ \begin{align} \left\| {\psi \left( k \right)} \right\| &\le M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^k}+ \nonumber\\ &\frac{{M\left\| {{Q_2}} \right\|{\alpha ^{k - 1}} {\delta _1}3\sqrt {6n\left( {n - 1} \right)} \left\| L \right\|}}{{1 - {\delta _1}}}\times\nonumber\\ &\sum\limits_{s = 0}^{k - 1} {{\alpha ^{ - s}}\left\| {\psi \left( s \right)} \right\|} + M\left\| {{Q_2}} \right\|{\alpha ^{k - 1}}\times\nonumber\\ &\sum\limits_{s = 0}^{k - 1} {{\alpha ^{ - s}} \frac{{\sqrt {6n\left( {n - 1} \right)} {\delta _2}}} {{1 - {\delta _1}}}{\beta ^s}} \end{align} $
(15) 接下来的部分, 将证明下列不等式成立.
$ \begin{equation} \left\| {\psi \left( k \right)} \right\| \le W{\beta ^k}.\end{equation} $
(16) 其中, $W = \max \left\{ {{\Theta _1}, {\Theta _2}} \right\}$,
首先, 证明对任意的$\rho > 1$, 下列不等式成立.
$ \begin{equation} \left\| {\psi \left( k \right)} \right\| < \rho W{\beta ^k} \end{equation} $
(17) 利用反证法, 先假设式(17)不成立, 则必将存在${k^ * } > 0$使得并且当$k \in \left({0, {k^ * }} \right)$时$\left\| {\psi \left(k \right)} \right\| < \rho W{\beta ^k}$成立.因此, 根据式(17)可得:
$ \begin{align*} &\rho W{\beta ^{{k^ * }}} \le \left\| {\psi \left( {{k^ * }} \right)} \right\| \le\\ &\qquad M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^{{k^ * }}} +\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}}M\times \end{align*} $
$ \begin{align*} &\qquad\sum\limits_{s = 0}^{{k^ * } - 1} {\alpha ^{ - s}}\left[ {\frac{{3\sqrt {6n\left( {n - 1} \right)} {\delta _1}\left\| L \right\| \cdot \left\| {\psi \left( s \right)} \right\|}}{{1 - {\delta _1}}}} \right]+ \\ &\qquad M\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}} \sum\limits_{s = 0}^{{k^ * } - 1} {{\alpha ^{ - s}} \left[ {\frac{{\sqrt {6n\left( {n - 1} \right)} {\delta _2}}}{{1 - {\delta _1}}}{\beta ^s}} \right]} < \\ &\qquad \rho M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^{{k^ * }}} + \rho M\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}}\times\\ &\qquad \sum\limits_{s = 0}^{{k^ * } - 1} {{\alpha ^{ - s}} \left[ {\frac{{3\sqrt {6n\left( {n - 1} \right)} {\delta _1}\left\| L \right\| \cdot W{\beta ^s}}} {{1 - {\delta _1}}}} \right]} +\\ &\qquad\rho M\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}} \sum\limits_{s = 0}^{{k^ * } - 1} {{\alpha ^{ - s}} \left[ {\frac{{\sqrt {6n\left( {n - 1} \right)} {\delta _2}{\beta ^s}}}{{1 - {\delta _1}}}} \right]=} \\ &\qquad \rho M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^{{k^ * }}}- \nonumber\\ &\qquad \rho \frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}}{\alpha ^{{k^ * }}}+\nonumber\\ &\qquad \rho \frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}}{\beta ^{{k^ * }}} \end{align*} $
1) 当$W = M\left\| {\psi \left(0 \right)} \right\|$时, 则有
$ \begin{equation*} \begin{aligned} &M\left\| {\psi \left( 0 \right)} \right\| - \nonumber\\ &\qquad \frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}} \ge 0 \end{aligned} \end{equation*} $
所以可得到
$ \begin{equation} \rho W{\beta ^{{k^ * }}} \le \left\| {\psi \left( {{k^ * }} \right)} \right\| \le \rho M\left\| {\psi \left( 0 \right)} \right\|{\beta ^{{k^ * }}}=\rho W{\beta ^{{k^ * }}} \end{equation} $
(18) 2) 当时, 则有
$ \begin{equation*} \begin{aligned} &M\left\| {\psi \left( 0 \right)} \right\|- \nonumber\\ &\qquad\frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}} < 0 \end{aligned} \end{equation*} $
所以有
$ \begin{align} &\rho W{\beta ^{{k^ * }}} \le \left\| {\psi \left( {{k^ * }} \right)} \right\|\le\nonumber\\ & \frac{{\rho {\delta _2}M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} {\beta ^{{k^ * }}}}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right) - 3{\delta _1}M\left\| {{Q_2}} \right\|\left\| L \right\|\sqrt {6n\left( {n - 1} \right)} }}=\nonumber\\ &\rho W{\beta ^{{k^ * }}} \end{align} $
(19) 根据以上结果, 式(18)和式(19)都与假设相矛盾.这说明原命题成立, 即对任意的$\rho > 1$, 式(17)成立.易知, 如果$\rho \to 1$, 则式(16)成立.根据式(16)可知, 当$k \to + \infty $时, 有, 则系统(5)是收敛的.由$\psi \left(k \right)$的定义可知, 系统(1)能够实现渐近一致.
定理2. 对于系统(1), 如果定理1中的条件成立, 并且控制器(2)中的设计参数满足如下条件,
$ {\delta _1} \in \left( {\frac{{\left( {\beta - \alpha } \right)}}{{\left( {\beta - \alpha } \right) + 3\sqrt {6n\left( {n - 1} \right)} M\left\| {{Q_{\rm{2}}}} \right\|\left\| L \right\|}}, 1} \right)\\ {\delta _2} > \frac{{\left\| L \right\|\left\| {\psi \left( 0 \right)} \right\|M\left( {1 + \beta } \right)}}{\beta } $
那么触发序列中的类Zeno行为将被排除.
证明. 易知排除类Zeno行为的关键是要证明不等式$k_{p + 1}^i - k_p^i > 1$成立.根据事件触发机制可知, 下一个触发时刻将会发生在触发函数(4)大于0时.进而可得到如下不等式
$ \begin{align} &\left| {{e_{bi}}\left( {k_{p + 1}^i} \right)} \right| + \left| {{e_{ci}}\left( {k_{p + 1}^i} \right)} \right| + \left| {{e_{gi}}\left( {k_{p + 1}^i} \right)} \right|\ge\nonumber\\ &\qquad{\delta _1}\left| {{b_i}\left( {k_p^i} \right)} \right| + {\delta _1}\left| {{c_i}\left( {k_p^i} \right)} \right| +\nonumber\\ &\qquad {\delta _1}\left| {{g_i}\left( {k_p^i} \right)} \right| + {\delta _2}{\beta ^{k_{p + 1}^i}} \end{align} $
(20) 定义, .结合式(20), 可得到下式
$ \begin{equation} {G_i}\left( {k_{p + 1}^i} \right) \ge {\delta _1}{H_i}\left( {k_p^i} \right) + {\delta _2}{\beta ^{k_{p + 1}^i}} \end{equation} $
(21) 结合式(16)和式(21)可得
$ \begin{align} {\delta _2}{\beta ^{k_{p + 1}^i}} &\le {G_i}\left( {k_{p + 1}^i} \right) - {\delta _1}{H_i}\left( {k_p^i} \right)\le\nonumber\\ & \left\| L \right\|\left( {\left\| {\psi \left( {k_p^i} \right)} \right\| + \left\| {\psi \left( {k_{p + 1}^i} \right)} \right\|} \right)\le\nonumber\\ & W\left\| L \right\|\left( {{\beta ^{k_p^i}} + {\beta ^{k_{p + 1}^i}}} \right) \end{align} $
(22) 求解上式得
$ \begin{equation} \left( {{\delta _2} - \left\| L \right\|W} \right){\beta ^{k_{p + 1}^i}} \le \left\| L \right\|W{\beta ^{k_p^i}} \end{equation} $
(23) 根据式(23)可得
$ \begin{equation} k_{p + 1}^i - k_p^i > \dfrac{{\ln \dfrac{{W\left\| L \right\|}}{{{\delta _2} - W\left\| L \right\|}}} } {\ln \beta } \end{equation} $
(24) 基于(24)易知当时, 有如下不等式成立
$ \begin{equation} \dfrac{{\ln \dfrac{{W\left\| L \right\|}}{{{\delta _2} - W\left\| L \right\|}}}} {\ln \beta } > 1 \end{equation} $
(25) 此外, 因为$W = M\left\| {\psi \left(0 \right)} \right\|$以及
$ \begin{equation} {\delta _1} > \frac{{\left( {\beta - \alpha } \right)}}{{\left( {\beta - \alpha } \right) + 3\sqrt {6n\left( {n - 1} \right)} M\left\| {{Q_{\rm{2}}}} \right\|\left\| L \right\|}} \end{equation} $
(26) 又可以得出
$ \begin{equation} {\delta _2} > \frac{{\left\| L \right\|\left\| {\psi \left( 0 \right)} \right\|M\left( {1 + \beta } \right)}}{\beta } = \frac{{\left\| L \right\|W\left( {1 + \beta } \right)}}{\beta } \end{equation} $
(27) 该式意味着式(25)成立, 又结合式(24)易知$k_{p + 1}^i - k_p^i > 1$, 即排除类Zeno行为的条件得已满足.
注2.类Zeno行为广泛存在于基于事件触发控制机制的离散系统中.然而, 当前极少有文献研究如何排除类Zeno行为, 尤其是对于三阶多智能体动态模型.定理2给出了排除三阶离散多智能体系统的类Zeno行为的参数条件.
3. 仿真实验
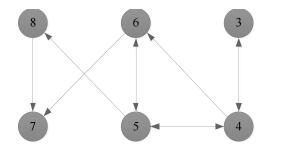
本部分将利用一个仿真实验来验证本文所提算法及理论的正确性和有效性.假设三阶离散多智能体系统(1)包含6个智能体, 且有向加权通信拓扑结构如图 1所示, 权重取值为0或1, 可以明显地看出该图包含有向生成树(满足假设1).
通过简单的计算可得, ${\mu _1} = 0$, ${\mu _2} = 0.6852$, ${\mu _3} = 1.5825 + 0.3865$i, ${\mu _4} = 1.5825 - 0.3865$i, ${\mu _5} = 3.2138$, ${\mu _6} = 3.9360$.令$M = 1$, 结合定理1和定理2可得到$0.035 < {\delta _1} < 1$, ${\delta _2} > 44.0025$, $0 < \alpha < \beta < 1$.令${\delta _1} = 0.2$, ${\delta _2} = 200$, $\alpha = 0.6$, $\beta = 0.9$, $\lambda = 0.02$, $\eta = 0.3$, $\gamma = 0.5$, 不难验证满足引理1的条件并且计算可知$\rho \left({{Q_1}} \right) = 0.9958 < 1$.三阶离散多智能体系统(1)的一致性结果如图 2~图 6所示.根据定理1可知, 基于控制器(2)和事件触发函数(4)的系统(1)能实现一致.从图 2~图 6可以看出, 仿真结果与理论分析符合.
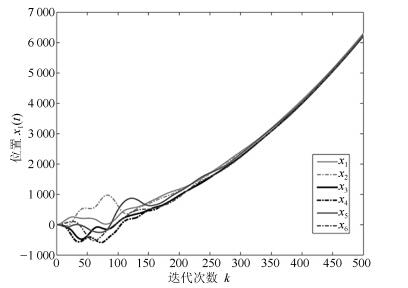 图 2 三阶离散多智能体系统的位置轨迹图Fig. 2 The trajectories of position in third-order discrete-time multi-agent systems
图 2 三阶离散多智能体系统的位置轨迹图Fig. 2 The trajectories of position in third-order discrete-time multi-agent systems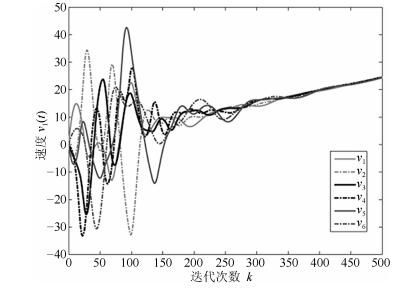 图 3 三阶离散多智能体系统的速度轨迹图Fig. 3 The trajectories of speed in third-order discrete-time multi-agent systems
图 3 三阶离散多智能体系统的速度轨迹图Fig. 3 The trajectories of speed in third-order discrete-time multi-agent systems 图 4 三阶离散多智能体系统的加速度轨迹图Fig. 4 The trajectories of acceleration in third-order discrete-time multi-agent systems
图 4 三阶离散多智能体系统的加速度轨迹图Fig. 4 The trajectories of acceleration in third-order discrete-time multi-agent systems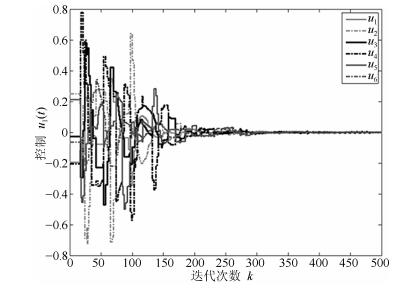 图 5 三阶离散多智能体系统的控制轨迹图Fig. 5 The trajectories of control in third-order discrete-time multi-agent systems
图 5 三阶离散多智能体系统的控制轨迹图Fig. 5 The trajectories of control in third-order discrete-time multi-agent systems图 2~图 4分别表征了系统(1)中所有智能体的位置、速度和加速度的轨迹, 从图中可以看出以上3个变量确实达到了一致.图 5展示了控制输入的轨迹.为了更清楚地体现事件触发机制的优点, 图 6给出了0$ \sim $100次迭代内的各智能体的触发时刻轨迹.从图 6可以看出, 本文设计的事件触发协议确实达到了减少更新次数, 节省资源的目的.
4. 结论
针对三阶离散多智能体系统的一致性问题, 构造了一个新颖的事件触发一致性协议, 分析得到了在通信拓扑为有向加权图且包含生成树的条件下, 系统中所有智能体的位置状态、速度状态和加速度状态渐近收敛到一致状态的充分条件.同时, 该条件指出了通信拓扑的Laplacian矩阵特征值和系统的耦合强度对系统一致性的影响.另外, 给出了排除类Zeno行为的参数条件.仿真实验结果也验证了上述结论的正确性.将文中获得的结论扩展到拓扑结构随时间变化的更高阶多智能体网络是极有意义的.这将是未来研究的一个具有挑战性的课题.
-
[1] Zheng S Q, Kahn M E. China's bullet trains facilitate market integration and mitigate the cost of megacity growth. Proceedings of the National Academy of Sciences of the United States of America, 2013, 110(14):E1248-E1253 doi: 10.1073/pnas.1209247110 [2] 彭其渊, 李建光, 杨宇翔, 文超.高速铁路建设对我国铁路运输的影响.西南交通大学学报, 2016, 51(3):525-533 doi: 10.11821/dlxb201412009Peng Qi-Yuan, Li Jian-Guang, Yang Yu-Xiang, Wen Chao. Influences of high-speed railway construction on railway transportation of China. Journal of Southwest Jiaotong University, 2016, 51(3):525-533 doi: 10.11821/dlxb201412009 [3] 360个人图书馆. 1998年德国高铁车祸与2005年日本列车出轨[Online], http://www.360doc.com/content/11/0725/18/2950524_135793573.shtml, 2017年11月12日The 360doc. 1998 German high-speed rail car accident and 2005 Japanese railway accident[Online], available: http://www.360doc.com/content/11/0725/18/2950524_135793573.shtml, November 12, 2017 [4] 新浪图片. 航拍动车追尾事故现场[Online], http://slide.news.sina.com.cn/c/slide_1_815_18359.html#p=10, 2017年11月12日The Sina Photo. High-speed train rear-end scene[Online], available:http://slide.news.sina.com.cn/c/slide_1_815_18359.html#p=10, November 12, 2017 [5] Fan Y X, Li Z, Pei J J, Li H Y, Sun J. Applying systems thinking approach to accident analysis in China:case study of "7.23" Yong-Tai-Wen high-speed train accident. Safety Science, 2015, 76:190-201 doi: 10.1016/j.ssci.2015.02.017 [6] 贾华强, 李利军.提高我国高铁动车组装备制造水平和运行品质的思考.中国铁路, 2014, (1):30-33 http://www.cqvip.com/QK/91624X/201401/48404652.htmlJia Hua-Qiang, Li Li-Jun. Thoughts on improving the manufacturing level and operation quality of high-speed railway EMU in China. Chinese Railways, 2014, (1):30-33 http://www.cqvip.com/QK/91624X/201401/48404652.html [7] Willsky A S. A survey of design methods for failure detection in dynamic systems. Automatica, 1976, 12(6):601-611 doi: 10.1016/0005-1098(76)90041-8 [8] Frank P M. Fault diagnosis in dynamic systems using analytical and knowledge-based redundancy:a survey and some new results. Automatica, 1990, 26(3):459-474 [9] 周东华, 叶银忠.现代故障诊断与容错控制.北京:清华大学出版社, 2000.Zhou Dong-Hua, Ye Yin-Zhong. Modern Fault Diagnosis and Fault-Tolerant Control. Beijing:Tsinghua University Press, 2000. [10] 周东华, 胡艳艳.动态系统的故障诊断技术.自动化学报, 2009, 35(6):748-758 http://www.aas.net.cn/CN/abstract/abstract13336.shtmlZhou Dong-Hua, Hu Yan-Yan. Fault diagnosis techniques for dynamic systems. Acta Automatica Sinica, 2009, 35(6):748-758 http://www.aas.net.cn/CN/abstract/abstract13336.shtml [11] Ding S. Model-based Fault Diagnosis Techniques:Design Schemes, Algorithms and Tools (2nd edition). London, UK:Springer-Verlag, 2013. [12] Qin S J. Survey on data-driven industrial process monitoring and diagnosis. Annual Reviews in Control, 2012, 36(2):220-234 doi: 10.1016/j.arcontrol.2012.09.004 [13] 陈庆, 肖茜.高速列车故障诊断技术的研究现状及发展趋势.价值工程, 2016, 35(11):254-255 http://www.cqvip.com/QK/93273X/201611/668461918.htmlChen Qing, Xiao Qian. Research status and development trend of fault diagnosis technology for high speed trains. Value Engineering, 2016, 35(11):254-255 http://www.cqvip.com/QK/93273X/201611/668461918.html [14] Ge Z Q, Song Z H, Gao F R. Review of recent research on data-based process monitoring. Industrial and Engineering Chemistry Research, 2013, 52(10):3543-3562 doi: 10.1021/ie302069q [15] Venkatasubramanian V, Rengaswamy R, Yin K, Kavuri S N. A review of process fault detection and diagnosis:Part Ⅱ:qualitative models and search strategies. Computers and Chemical Engineering, 2003, 27(3):313-326 doi: 10.1016/S0098-1354(02)00161-8 [16] Dai X W, Gao Z W. From model, signal to knowledge:a data-driven perspective of fault detection and diagnosis. IEEE Transactions on Industrial Informatics, 2013, 9(4):2226-2238 doi: 10.1109/TII.2013.2243743 [17] 刘建强.高速列车电气系统技术讲座第二讲:高速列车牵引传动系统.电力电子, 2011, (3):56-62 http://www.cqvip.com/QK/87150X/201103/38376702.htmlLiu Jian-Qiang. The traction drive system of high-speed train. Power Electronics, 2011, (3):56-62 http://www.cqvip.com/QK/87150X/201103/38376702.html [18] 刘诗佳.动车组牵引系统故障统计分析.铁道机车车辆, 2013, 33(5):80-85 http://mall.cnki.net/magazine/Article/TDJC201301012.htmLiu Shi-Jia. Statistics and analysis of traction system faults for electric multiple unit. Railway Locomotive and Car, 2013, 33(5):80-85 http://mall.cnki.net/magazine/Article/TDJC201301012.htm [19] Karaköse E, Gençoǧlu M T. An analysis approach for condition monitoring and fault diagnosis in pantograph-catenary system. In:Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Manchester, UK:IEEE, 2013. 1963-1968 [20] Aydin İ, Karaköse E, Karaköse M, Gençoǧlu M T, Akin E. A new computer vision approach for active pantograph control. In:Proceedings of the 2013 IEEE International Symposium on Innovations in Intelligent Systems and Applications. Albena, Bulgaria:IEEE, 2013. 1-5 [21] Song J, Lin X N, Zheng Y, Guo Q W, Sun J W. Traction transformer core multipoint grounded fault on-line monitoring system. In:Proceedings of the 2014 International MultiConference of Engineers and Computer Scientists. Hong Kong, China:IMECS, 2014. [22] Tian X J, Li Y H, Li X Q. Hybrid algorithm for traction transformer differential protection based on intrinsic mode function energy entropy and correlation dimension. IET Generation, Transmission and Distribution, 2014, 8(7):1274-1283 [23] Dai C X, Liu Z G, Hu K T, Huang K. Fault diagnosis approach of traction transformers in high-speed railway combining kernel principal component analysis with random forest. IET Electrical Systems in Transportation, 2016, 6(3):202-206 doi: 10.1049/iet-est.2015.0018 [24] 戴晨曦, 刘志刚, 胡轲珽, 高松.基于模型与模糊Petri网融合的高铁牵引变压器故障诊断.电力系统保护与控制, 2016, 44(11):26-32 doi: 10.7667/PSPC151181Dai Chen-Xi, Liu Zhi-Gang, Hu Ke-Ting, Gao Song. Fault diagnosis for traction transformer of high speed railway on the integration of model-based diagnosis and fuzzy Petri nets. Power System Protection and Control, 2016, 44(11):26-32 doi: 10.7667/PSPC151181 [25] 戴舜华. CRH_2型系列动车组牵引变流器介绍及故障分析.铁道机车车辆, 2013, 33(2):93-97 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=tdjccl201302021Dai Shun-Hua. Introduction and failure analysis of traction converter for CRH_2 EMUs. Railway Locomotive and Car, 2013, 33(2):93-97 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=tdjccl201302021 [26] 李玉超, 田永洙, 高沁翔.基于BP神经网络的200 km/h牵引变流器故障诊断技术的研究.铁道机车车辆, 2007, 27(2):4-7 https://www.wenkuxiazai.com/word/1b721a41c5da50e2524d7f86-1.docLi Yu-Chao, Tian Yong-Zhu, Gao Qin-Xiang. Study of 200 km/h traction converter fault diagnosis technology based on BP neural network. Railway Locomotive and Car, 2007, 27(2):4-7 https://www.wenkuxiazai.com/word/1b721a41c5da50e2524d7f86-1.doc [27] 代崇敬. CRH3动车组变流器故障诊断的研究[硕士学位论文], 西南交通大学, 中国, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10613-1015338523.htmDai Chong-Jing. Research of Fault Diagnosis in the Traction Converter of CRH3 EMU[Master thesis], Southwest Jiaotong University, China, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10613-1015338523.htm [28] Xu X, Lu N Y, Yong J Q, Jiang B. Fault propagation analysis of IGBT fault in CRH5 traction system based on signed directed graph. In:Proceedings of the 2016 Prognostics and System Health Management Conference (PHM-Chengdu). Chengdu, China:IEEE, 2016. 1-6 [29] Tian Z S, Ge X L. An on-line fault diagnostic method based on frequency-domain analysis for IGBTs in traction PWM rectifiers. In:Proceedings of the 8th IEEE International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia). Hefei, China:IEEE, 2016. 3403-3407 [30] Gou B, Ge X L, Wang S L, Feng X Y, Kuo J B, Habetler T G. An open-switch fault diagnosis method for single-phase PWM rectifier using a model-based approach in high-speed railway electrical traction drive system. IEEE Transactions on Power Electronics, 2016, 31(5):3816-3826 doi: 10.1109/TPEL.2015.2465299 [31] Hu K T, Liu Z G, Lin S S. Wavelet entropy-based traction inverter open switch fault diagnosis in high-speed railways. Entropy, 2016, 18(3):Article No. 78 doi: 10.3390/e18030078 [32] 戴晨曦, 刘志刚, 胡轲珽.关于高铁CRH2型动车组逆变器故障诊断研究.计算机仿真, 2016, 33(4):217-222 http://cdmd.cnki.com.cn/Article/CDMD-10613-1013248096.htmDai Chen-Xi, Liu Zhi-Gang, Hu Ke-Ting. Research of fault diagnosis for the high-speed railway CRH2 EMUs inverters. Computer Simulation, 2016, 33(4):217-222 http://cdmd.cnki.com.cn/Article/CDMD-10613-1013248096.htm [33] Xia J H, Guo Y B, Dai B J, Zhang X H. Sensor fault tolerant control method for electric traction PWM rectifier using sliding mode observer. In:Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS). Chiba, Japan:IEEE, 2016. 1-6 [34] Gou B, Ge X L, Liu Y C, Feng X Y. Load-current-based current sensor fault diagnosis and tolerant control scheme for traction inverters. Electronics Letters, 2016, 52(20):1717-1719 doi: 10.1049/el.2016.0675 [35] Zhang K K, Jiang B, Yan X G, Mao Z H. Sliding mode observer based incipient sensor fault detection with application to high-speed railway traction device. ISA Transactions, 2016, 63:49-59 doi: 10.1016/j.isatra.2016.04.004 [36] Gou B, Ge X L, Pu J K, Feng X Y. A fault diagnosis and fault tolerant control method for DC-link circuit using notch filter in power traction converter. In:Proceedings of the 8th IEEE International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia). Hefei, China:IEEE, 2016. 3230-3235 [37] Guzinski J, Diguet M, Krzeminski Z, Lewicki A, Abu-Rub H. Application of speed and load torque observers in high-speed train drive for diagnostic purposes. IEEE Transactions on Industrial Electronics, 2009, 56(1):248-256 doi: 10.1109/TIE.2008.928103 [38] Guzinski J, Abu-Rub H, Diguet M, Krzeminski Z, Lewicki A. Speed and load torque observer application in high-speed train electric drive. IEEE Transactions on Industrial Electronics, 2010, 57(2):565-574 doi: 10.1109/TIE.2009.2029582 [39] Boccaletti C, Bruzzese C, Honorati O, Santini E. Rotor bars breakage in railway traction squirrel cage induction motors and diagnosis by MCSA technique, Part Ⅱ:theoretical arrangements for fault-related current sidebands. In:Proceedings of the 5th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics, and Drives. Vienna, Austria:IEEE, 2005. 1-6 [40] Wu Y K, Jiang B, Shi P. Incipient fault diagnosis for T-S fuzzy systems with application to high-speed railway traction devices. IET Control Theory and Applications, 2016, 10(17):2286-2297 doi: 10.1049/iet-cta.2015.1320 [41] Wu Y K, Jiang B, Lu N Y, Yang H, Zhou Y. Multiple incipient sensor faults diagnosis with application to high-speed railway traction devices. ISA Transactions, 2016, 67:183-192 [42] 丁建明, 林建辉, 王晗, 林森.万向轴动不平衡检测的二代小波变换奇异值方法.机械工程学报, 2014, 50(12):110-117 http://www.cnki.com.cn/Article/CJFDTotal-MKJD201501030.htmDing Jian-Ming, Lin Jian-Hui, Wang Han, Lin Sen. Detection of the dynamic unbalance with cardan shaft applying the second wavelet transform and singular value decomposition. Journal of Mechanical Engineering, 2014, 50(12):110-117 http://www.cnki.com.cn/Article/CJFDTotal-MKJD201501030.htm [43] Ding J M, Lin J H, He L, Zhao J. Dynamic unbalance detection of cardan shaft in high-speed train based on EMD-SVD-NHT. Journal of Central South University, 2015, 22(6):2149-2157 doi: 10.1007/s11771-015-2739-8 [44] Ding J M, Lin J H, Yu S W. Dynamic unbalance detection of cardan shaft in high-speed train applying double decomposition and double reconstruction method. Measurement, 2015, 73:111-120 doi: 10.1016/j.measurement.2015.05.016 [45] 何晓琴, 常友渠.一种运用非线性特征提取的动车牵引齿轮箱故障可靠诊断新方法.现代制造工程, 2015, (6):31-39 http://www.cqvip.com/QK/93345A/201506/664966782.htmlHe Xiao-Qin, Chang You-Qu. A novel approach for reliable gearbox fault diagnosis in high-speed train driving system based on nonlinear feature extraction. Modern Manufacturing Engineering, 2015, (6):31-39 http://www.cqvip.com/QK/93345A/201506/664966782.html [46] Tang R X, Cheng X Q. Fault diagnosis for the gearbox of a high-speed train on generalized congruence neural networks. In:Proceedings of the 5th International Conference on Transportation Engineering. Dalian, China:ASCE, 2015. 2209-2215 [47] Zhang B, Tan A C C, Lin J H. Gearbox fault diagnosis of high-speed railway train. Engineering Failure Analysis, 2016, 66:407-420 doi: 10.1016/j.engfailanal.2016.04.020 [48] Xiao W C, Yang Y, Wang H J, Li T R, Xing H L. Semi-supervised hierarchical clustering ensemble and its application. Neurocomputing, 2016, 173:1362-1376 doi: 10.1016/j.neucom.2015.09.009 [49] Lee W Y, Lee D H, Ji H Y. Comparison of vibration signal analysis methods for effective gear fault detection. Applied Mechanics and Materials, 2015, 709:456-459 [50] 张建柏, 彭辉水, 倪大成, 刘雄.高速列车制动技术综述.机车电传动, 2011, (4):1-4 https://www.wenkuxiazai.com/doc/d3ec630bf7ec4afe04a1df75-3.htmlZhang Jian-Bai, Peng Hui-Shui, Ni Da-Cheng, Liu Xiong. Overviewing braking technology of the high-speed trains. Electric Drive for Locomotives, 2011, (4):1-4 https://www.wenkuxiazai.com/doc/d3ec630bf7ec4afe04a1df75-3.html [51] 王月明.动车组制动技术.北京:中国铁道出版社, 2010.Wang Yue-Ming. EMU Braking Technology. Beijing:China Railway Publishing House, 2010. [52] 胡准庆, 彭俊彬, 程卫东.动车组制动系统.北京:北京交通大学出版社, 2012.Hu Zhun-Qing, Peng Jun-Bin, Cheng Wei-Dong. EMU Braking System. Beijing:Beijing Jiaotong University Press, 2012. [53] 王德明, 李东凯.动车组制动故障原因分析及处理建议.铁道机车车辆, 2008, 28(S):243-245 http://mall.cnki.net/magazine/Article/TDJC201301006.htmWang De-Ming, Li Dong-Kai. Cause analysis and treatment suggestions on brake failures of the EMU. Railway Locomotive and Car, 2008, 28(S):243-245 http://mall.cnki.net/magazine/Article/TDJC201301006.htm [54] 李万新, 章阳, 林荣文, 王乐.和谐号动车组制动系统故障诊断及安全措施.铁道机车车辆, 2011, 31(5):39-42 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=tdjccl201105008Li Wan-Xin, Zhang Yang, Lin Rong-Wen, Wang Le. Fault diagnosis and safety measures of EMU braking system. Railway Locomotive and Car, 2011, 31(5):39-42 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=tdjccl201105008 [55] 曹宏发, 乔峰, 温熙圆, 安志鹏.和谐号动车组制动系统故障再现及分析.铁道机车车辆, 2011, 31(5):43-47 http://mall.cnki.net/magazine/Article/TDJC201105015.htmCao Hong-Fa, Qiao Feng, Wen Xi-Yuan, An Zhi-Peng. Reproduction and analysis of failure for braking system of CRH3 EMU. Railway Locomotive and Car, 2011, 31(5):43-47 http://mall.cnki.net/magazine/Article/TDJC201105015.htm [56] 梁雪, 袁飞.动车组制动供风系统常见故障与应急处理.科技创新与应用, 2015, (32):153 http://www.cqvip.com/QK/96274A/201532/666196255.htmlLiang Xue, Yuan Fei. Common faults and emergency treatment of the air supply system for EMU. Technology Innovation and Application, 2015, (32):153 http://www.cqvip.com/QK/96274A/201532/666196255.html [57] 亢磊, 李云龙, 乔峰, 杨川, 杨再保. CRH380CL型高速动车组制动系统高低阶压力切换故障原因分析及预防措施.铁道机车车辆, 2016, 36(6):29-34 http://mall.cnki.net/magazine/Article/TDJC201606010.htmKang Lei, Li Yun-Long, Qiao Feng, Yang Chuan, Yang Zai-Bao. Cause analysis and preventive measures of high-low braking ratio disturbed fault for CRH380CL high-speed EMU braking system. Railway Locomotive and Car, 2016, 36(6):29-34 http://mall.cnki.net/magazine/Article/TDJC201606010.htm [58] 秦佳颖, 陈澍军.基于实例的高速动车组制动系统故障诊断方法介绍.铁道车辆, 2016, 54(7):41-43 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hgzdhjyb201304027Qin Jia-Ying, Chen Shu-Jun. Description of the trouble diagnostic method for the braking system for high speed multiple units based on practical example. Rolling Stock, 2016, 54(7):41-43 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hgzdhjyb201304027 [59] 严书荣.一类高速列车制动故障诊断专家系统方案研究.电脑知识与技术, 2010, 6(32):9097-9098 doi: 10.3969/j.issn.1009-3044.2010.32.071Yan Shu-Rong. A kind of study program of fault diagnosis expert system for brake of high-speed train. Computer Knowledge and Technology, 2010, 6(32):9097-9098 doi: 10.3969/j.issn.1009-3044.2010.32.071 [60] 王猛. 基于LabVIEW的电路板故障测试系统的设计[硕士学位论文], 北京交通大学, 中国, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10004-1012355608.htmWang Meng. Design of PCB Board Testing System Based on LabVIEW[Master thesis], Beijing Jiaotong University, China, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10004-1012355608.htm [61] 田静宜, 杨业, 杨雪峰, 郭阳.高速列车智能化故障诊断方法.化工自动化及仪表, 2013, 40(4):531-533 http://www.oalib.com/paper/4824890Tian Jing-Yi, Yang Ye, Yang Xue-Feng, Guo Yang. Intelligent fault diagnosis method for high-speed trains. Control and Instruments in Chemical Industry, 2013, 40(4):531-533 http://www.oalib.com/paper/4824890 [62] 钟文奇. 基于贝叶斯网络的列车故障诊断研究[硕士学位论文], 北京交通大学, 中国, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10004-1013135888.htmZhong Wen-Qi. Research of Fault Diagnosis of Train for Bayesian Network[Master thesis], Beijing Jiaotong University, China, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10004-1013135888.htm [63] 徐磊, 王丹, 宋德刚, 宋龙龙, 王太勇.基于FTA和贝叶斯网络的动车组制动系统故障分析.制造业自动化, 2016, 38(2):51-55 http://www.cqvip.com/QK/92337A/201602/667970038.htmlXu Lei, Wang Dan, Song De-Gang, Song Long-Long, Wang Tai-Yong. Fault diagnosis and research of the foundation brake rigging system based on the combination of fault tree and Bayesian network theory. Manufacturing Automation, 2016, 38(2):51-55 http://www.cqvip.com/QK/92337A/201602/667970038.html [64] 丁国君. 动车组制动控制系统故障诊断方法研究[博士学位论文], 北京交通大学, 中国, 2013.Ding Guo-Jun. Fault Diagnosis Methods for EMUs Brake Control System[Ph.D. dissertation], Beijing Jiaotong University, China, 2013. [65] 丁国君, 王立德, 申萍, 杨鹏.基于EEMD能量熵和LSSVM的传感器故障诊断.传感器与微系统, 2013, 32(7):22-25 http://www.oalib.com/paper/4607180Ding Guo-Jun, Wang Li-De, Shen Ping, Yang Peng. Sensor fault diagnosis based on EEMD energy entropy and LSSVM. Transducer and Microsystem Technologies, 2013, 32(7):22-25 http://www.oalib.com/paper/4607180 [66] Liu J, Li Y F, Zio E. A SVM framework for fault detection of the braking system in a high speed train. Mechanical Systems and Signal Processing, 2017, 87:401-409 doi: 10.1016/j.ymssp.2016.10.034 [67] 周东华, 何潇, 纪洪泉. 一种动车组制动系统传感器故障的诊断方法, 专利CN104596780B, 2017年4月26日Zhou Dong-Hua, He Xiao, Ji Hong-Quan. Diagnosis method for sensor faults of motor train unit braking system, Patent CN104596780B, April 26, 2017 [68] 周东华, 何潇, 纪洪泉, 台秀华, 赛华松. 动车组空气制动控制系统传感器故障诊断的方法与系统, 专利CN105204496B, 2018年1月12日Zhou Dong-Hua, He Xiao, Ji Hong-Quan, Tai Xiu-Hua, Sai Hua-Song. Sensor fault diagnosing method and system for air braking control system of motor train unit, Patent CN105204496B, January 12, 2018 [69] Ji H Q, He X, Sai H S, Tai X H, Zhou D H. Fault detection of EMU brake cylinder. In:Proceedings of the 35th Chinese Control Conference (CCC). Chengdu, China:IEEE, 2016. 6668-6672 [70] Zhou D H, Ji H Q, He X, Shang J. Fault detection and isolation of the brake cylinder system for electric multiple units. IEEE Transactions on Control Systems Technology, 2017. DOI: 10.1109/TCST.2017.2718979 [71] 郭天序, 陈茂银, 赛华松, 台秀华, 周东华. 高速列车制动系统气制动泄漏故障快速检测方法. 第35届中国控制会议(CCC2016). 成都, 中国: 中国系统工程学会, 2016. 6704-6708Guo Tian-Xu, Chen Mao-Yin, Sai Hua-Song, Tai Xiu-Hua, Zhou Dong-Hua. Rapid fault detection method for leakage falure of air brake system on high-speed rail. In:Proceedings of the 35th Chinese Control Conference (CCC2016). Chengdu, China:Systems Engineering Society of China, 2016. 6704-6708 [72] Ji H Q, He X, Shang J, Zhou D H. Incipient fault detection with smoothing techniques in statistical process monitoring. Control Engineering Practice, 2017, 62:11-21 [73] 刘源萍. CTCS-3级列控系统常见故障分析处理方法.科技风, 2012, (17):74 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kjf201217055Liu Yuan-Ping. Analysis and treatment measures for common faults of CTCS-3 train control system. Technology Wind, 2012, (17):74 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kjf201217055 [74] Yang L B, Xu T H, Wang Z X. Agent based heterogeneous data integration and maintenance decision support for high-speed railway signal system. In:Proceedings of the 17th IEEE International Conference on Intelligent Transportation Systems (ITSC). Qingdao, China:IEEE, 2014. 1976-1981 [75] Liu J, Cai B G, Wang J. A fault detection and diagnosis method for speed distance units of high-speed train control systems. In:Proceedings of the 35th Chinese Control Conference (CCC). Chengdu, China:IEEE, 2016. 10258-10263 [76] 程雨. 基于贝叶斯网络的列控系统故障诊断研究[硕士学位论文], 北京交通大学, 中国, 2014.Cheng Yu. Research on Bayesian Network Based Fault Diagnosis of Train Control Systems[Master thesis], Beijing Jiaotong University, China, 2014. [77] 赵阳, 徐田华, 周玉平, 赵文天.基于贝叶斯网络的高铁信号系统车载设备故障诊断方法的研究.铁道学报, 2014, 36(11):48-53 doi: 10.3969/j.issn.1001-8360.2014.11.011Zhao Yang, Xu Tian-Hua, Zhou Yu-Ping, Zhao Wen-Tian. Bayesian network based fault diagnosis system for vehicle on-board equipment of high-speed railway. Journal of the China Railway Society, 2014, 36(11):48-53 doi: 10.3969/j.issn.1001-8360.2014.11.011 [78] 李逸. 模糊贝叶斯决策在列控车载设备故障诊断中的应用研究[硕士学位论文], 兰州交通大学, 中国, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10732-1015448519.htmLi Yi. Application Research on Fault Diagnosis of On-board Equipment of Train Control System Based on Fuzzy Theory and Bayesian Network[Master thesis], Lanzhou Jiaotong University, China, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10732-1015448519.htm [79] 梁潇. 基于贝叶斯网络的列控车载设备故障诊断方法[硕士学位论文], 北京交通大学, 中国, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10004-1016119648.htmLiang Xiao. Bayesian Network Based Fault Diagnosis Method of On-board Equipment for Train Control System[Master thesis], Beijing Jiaotong University, China, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10004-1016119648.htm [80] 王振显. 基于案例推理的高铁信号系统车载设备故障诊断[硕士学位论文], 北京交通大学, 中国, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10004-1015558144.htmWang Zhen-Xian. CBR-based Fault Diagnosis System for Vehicle Equipment of High-Speed Railway[Master thesis], Beijing Jiaotong University, China, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10004-1015558144.htm [81] 曹哲. 基于神经网络与案例推理的车载设备故障诊断研究[硕士学位论文], 北京交通大学, 中国, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10004-1016074136.htmCao Zhe. Research on the Fault Diagnosis System for the Vehicle Equipment Based on Neural Network and Case-based Reasoning[Master thesis], Beijing Jiaotong University, China, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10004-1016074136.htm [82] 赵阳, 徐田华.基于文本挖掘的高铁信号系统车载设备故障诊断.铁道学报, 2015, 37(8):53-59 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=tdxb201508009Zhao Yang, Xu Tian-Hua. Text mining based fault diagnosis for vehicle on-board equipment of high speed railway signal system. Journal of the China Railway Society, 2015, 37(8):53-59 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=tdxb201508009 [83] 王峰. 基于文本挖掘的高铁车载设备故障诊断方法研究[硕士学位论文], 北京交通大学, 中国, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10004-1016058847.htmWang Feng. Study on Text Mining Based Fault Diagnosis Method for Vehicle On-board Equipment of High Speed Railway[Master thesis], Beijing Jiaotong University, China, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10004-1016058847.htm [84] Yin J T, Zhao W T. Fault diagnosis network design for vehicle on-board equipments of high-speed railway:a deep learning approach. Engineering Applications of Artificial Intelligence, 2016, 56:250-259 doi: 10.1016/j.engappai.2016.10.002 [85] 宋琦. 高速列车的鲁棒自适应及容错控制[博士学位论文], 北京交通大学, 中国, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10004-1015544349.htmSong Qi. Robust Adaptive and Fault-tolerant Control of High Speed Trains[Ph.D. dissertation], Beijing Jiaotong University, China, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10004-1015544349.htm [86] 陶涛. 高速铁路列车容错控制[博士学位论文], 北京交通大学, 中国, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10004-1015611884.htmTao Tao. Fault-tolerant Control of High-speed Trains[Ph.D. dissertation], Beijing Jiaotong University, China, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10004-1015611884.htm [87] 张秋明. 高速列车执行器故障程度识别和容错控制[硕士学位论文], 北京交通大学, 中国, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10004-1016121068.htmZhang Qiu-Ming. Actuator Fault Degree Identification and Fault-tolerant Control of High Speed Trains[Master thesis], Beijing Jiaotong University, China, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10004-1016121068.htm [88] Gao R Z, Wang Y J, Lai J F, Gao H. Neuro-adaptive fault-tolerant control of high speed trains under traction-braking failures using self-structuring neural networks. Information Sciences, 2016, 367-368:449-462 doi: 10.1016/j.ins.2016.05.033 [89] Wang Y J, Song Y D, Gao H, Lewis F L. Distributed fault-tolerant control of virtually and physically interconnected systems with application to high-speed trains under traction/braking failures. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2):535-545 doi: 10.1109/TITS.2015.2479922 [90] 杨卫峰, 冯江华, 易伟民.高速列车网络控制系统安全性设计.机车电传动, 2014, (3):14-17 http://epub.cqvip.com/articledetail.aspx?id=1000000350192Yang Wei-Feng, Feng Jiang-Hua, Yi Wei-Min. Safety design of network control system in high-speed train. Electric Drive for Locomotives, 2014, (3):14-17 http://epub.cqvip.com/articledetail.aspx?id=1000000350192 [91] 常振臣, 李强. CRH380CL高速列车网络控制系统.电力机车与城轨车辆, 2017, 40(3):1-5 http://epub.cqvip.com/articledetail.aspx?id=1000000350192Chang Zhen-Chen, Li Qiang. Network control system for CRH380CL high-speed EMU. Electric Locomotives and Mass Transit Vehicles, 2017, 40(3):1-5 http://epub.cqvip.com/articledetail.aspx?id=1000000350192 [92] 于海波. 高速动车组网络双绞线自动检测及故障自动定位. 第八届中国智能交通年会论文集. 合肥, 中国: 中国智能交通协会, 2013. 330-335Yu Hai-Bo. Automatic fault detection and location of high-speed EMU network twisted pair. In:Proceedings of the 8th China Intelligent Transportation Annual Meeting. Hefei, China:China Intelligent Transportation Systems Association, 2013. 330-335 [93] 石国良, 李晓, 金炜东, 苟先太.基于排列组合熵的高速列车走行部故障分析.计算机应用研究, 2014, 31(12):3625-3627 doi: 10.3969/j.issn.1001-3695.2014.12.028Shi Guo-Liang, Li Xiao, Jin Wei-Dong, Gou Xian-Tai. Fault analysis of high-speed train bogie based on permutation entropy. Application Research of Computers, 2014, 31(12):3625-3627 doi: 10.3969/j.issn.1001-3695.2014.12.028 [94] 秦娜, 王开云, 金炜东, 黄进, 孙永奎.高速列车转向架故障的经验模态熵特征分析.交通运输工程学报, 2014, 14(1):57-64 http://www.cqvip.com/QK/90752A/201401/48977344.htmlQin Na, Wang Kai-Yun, Jin Wei-Dong, Huang Jin, Sun Yong-Kui. Fault feature analysis of high-speed train bogie based on empirical mode decomposition entropy. Journal of Traffic and Transportation Engineering, 2014, 14(1):57-64 http://www.cqvip.com/QK/90752A/201401/48977344.html [95] 李辉, 金炜东.基于白噪声统计特性与EEMD的高速列车横向减振器故障诊断.计算机应用研究, 2016, 33(9):2648-2651 http://www.cnki.com.cn/Article/CJFDTOTAL-DJJI200404016.htmLi Hui, Jin Wei-Dong. Lateral damper fault diagnosis of high-speed train based on statistical characteristics of white noise and EEMD. Application Research of Computers, 2016, 33(9):2648-2651 http://www.cnki.com.cn/Article/CJFDTOTAL-DJJI200404016.htm [96] Yan R Y, He X, Zhou D H. A diagnosis scheme for intermittent faults in active suspension systems of high speed trains. In:Proceedings of the 12th World Congress on Intelligent Control and Automation (WCICA). Guilin, China:IEEE, 2016. 1297-1302 [97] Liu X Y, Alfi S, Bruni S. An efficient recursive least square-based condition monitoring approach for a rail vehicle suspension system. Vehicle System Dynamics, 2016, 54(6):814-830 [98] 周东华, 史建涛, 何潇.动态系统间歇故障诊断技术综述.自动化学报, 2014, 40(2):161-171 http://www.aas.net.cn/CN/abstract/abstract18279.shtmlZhou Dong-Hua, Shi Jian-Tao, He Xiao. Review of intermittent fault diagnosis techniques for dynamic systems. Acta Automatica Sinica, 2014, 40(2):161-171 http://www.aas.net.cn/CN/abstract/abstract18279.shtml [99] 张可, 周东华, 柴毅.复合故障诊断技术综述.控制理论与应用, 2015, 32(9):1143-1157 http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_kzllyyy201509003Zhang Ke, Zhou Dong-Hua, Chai Yi. Review of multiple fault diagnosis methods. Control Theory and Applications, 2015, 32(9):1143-1157 http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_kzllyyy201509003 [100] Liu Y, Wang Z D, He X, Zhou D H. A class of observer-based fault diagnosis schemes under closed-loop control:performance evaluation and improvement. IET Control Theory and Applications, 2017, 11(1):135-141 [101] Wang K, Chen J H, Song Z H. Data-driven sensor fault diagnosis systems for linear feedback control loops. Journal of Process Control, 2017, 54:152-171 doi: 10.1016/j.jprocont.2017.03.001 期刊类型引用(3)
1. 岳振宇,范大昭,董杨,纪松,李东子. 一种星载平台轻量化快速影像匹配方法. 地球信息科学学报. 2022(05): 925-939 .  百度学术
百度学术2. 王若兰,潘万彬,曹伟娟. 图像局部区域匹配驱动的导航式拼图方法. 计算机辅助设计与图形学学报. 2020(03): 452-461 . 百度学术3. 胡敬双,聂洪玉. 灰度序模式的局部特征描述算法. 中国图象图形学报. 2017(06): 824-832 . 百度学术其他类型引用(9)
-

 下载:
下载:

 下载:
下载:

计量
- 文章访问数: 4091
- HTML全文浏览量: 781
- PDF下载量: 2263
- 被引次数: 12
