

-
摘要: 以抑制出水氨氮浓度、总氮浓度峰值和降低能耗为目标,提出污水处理决策优化控制方法.首先利用神经网络建立出水氨氮和总氮预测模型;其次使用多目标进化算法得到溶解氧浓度和硝态氮浓度设定值;最后,根据出水氨氮和总氮浓度预测结果选择控制策略(优化控制和抑制控制).以仿真基准模型(BSM1)为平台,采用提出的决策优化控制方法进行控制,实验结果表明,该控制方法有效抑制了出水氨氮和总氮浓度峰值,出水超标时间和能耗明显少于所对比决策控制方法.Abstract: In order to inhibit the peak of ammonia nitrogen (SNH, e) and total nitrogen (SNtot, e) concentrations in effluent and reduce energy consumption, we present in this paper a decision and optimization control method. Firstly, we establish the prediction models of SNH, e and SNtot, e with neural network. Secondly, we optimize the set points of dissolved oxygen concentration and nitrate nitrogen concentration with multiobjective evolutionary algorithm. Lastly, select control strategy (optimal control strategy or inhibitory control strategy) based on the outcome of prediction models. Evaluation is carried out with the Benchmark Simulation Model No.1. The results show that the proposed method restrains the peaks of SNH, e and SNtot, e effectively while the percentages of time of SNH, e and SNtot, e violations are less than those of the compared inhibitory control methods, and that the energy consumption using the proposed method is less than that using the counterpart inhibitory control method significantly.
-
Key words:
- Wastewater treatment /
- optimal control /
- inhibitory control /
- prediction model
1) 本文责任编委 赵千川 -
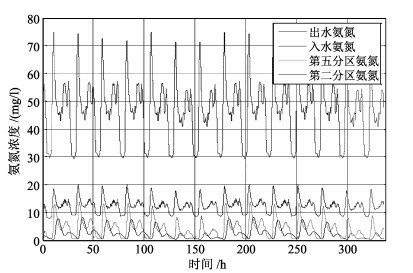
图 1 14天不同区域氨氮浓度曲线
Fig. 1 Ammonia nitrogen concentration curve in different regions within 14 days

图 8 $S_{\rm {NO, 2}}$设定值及跟踪曲线
Fig. 8 Optimization and tracking results of $S_{\rm {NO, 2}}$
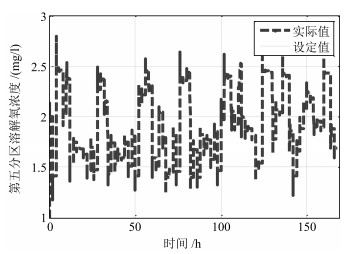
图 9 $S_{\rm {O, 5}}$设定值及跟踪曲线
Fig. 9 Optimization and tracking results of $S_{\rm {O, 5}}$
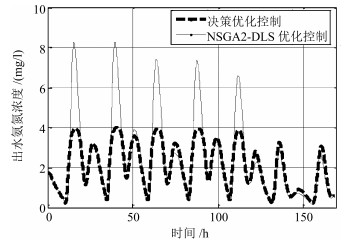
图 11 决策优化控制与优化控制$S_{\rm {NH, e}}$变化曲线
Fig. 11 The curves of $S_{\rm {NH, e}}$ with decision and optimization control system and optimization control system

图 12 决策优化控制与优化控制$S_{\rm {Ntot, e}}$变化曲线
Fig. 12 The curves of $S_{\rm {Ntot, e}}$ with decision and optimization control system and optimization control system
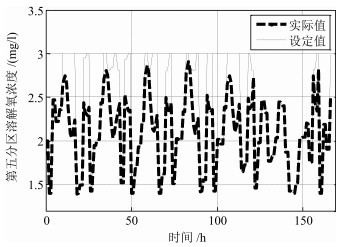
图 13 $S_{\rm {O, 5}}$设定值及跟踪曲线
Fig. 13 Optimization and tracking results of $S_{\rm {O, 5}}$
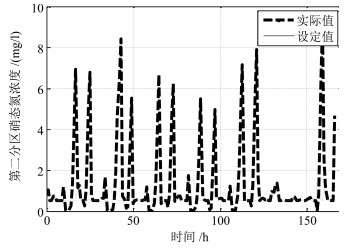
图 14 $S_{\rm {NO, 2}}$设定值及跟踪曲线
Fig. 14 Optimization and tracking results of $S_{\rm {NO, 2}}$
表 1 不同区域到入水氨氮浓度最大时刻滞后时间(h)
Table 1 The time lag from inflow to different regions (h)
第二分区 第五分区 出水 第1天 0.2375 1.1000 4.4375 第2天 0.2375 1.3250 4.5750 第3天 0.2375 1.1625 4.6000 第4天 0.2375 1.3500 4.6875 第5天 0.2375 1.1500 4.6500 第6天 0.4875 1.5625 5.2875 第7天 0.4875 1.6750 5.2750 第8天 0.2375 1.1250 4.4875 第9天 0.2375 1.3250 4.5750 第10天 0.2375 1.1625 4.6000 第11天 0.2375 1.3500 4.6875 第12天 0.2375 1.1500 4.6500 第13天 0.4875 1.5625 5.2875 第14天 0.4875 1.6750 5.2750  下载: 导出CSV
下载: 导出CSV
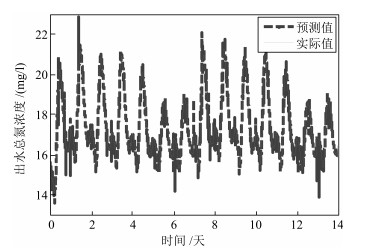
表 2 预测模型测试均方根误差(10次实验平均值)
Table 2 Test RMSE of prediction model (mean value of ten test results)
方法 氨氮预测模型RMSE 总氮预测模型RMSE 决策优化控制 0.4241 0.3506 Santín[10] 0.9771 0.7515
下载: 导出CSV
表 3 SO,5模糊跟踪控制器模糊规则
Table 3 Fuzzy rules of $S_{\rm {O, 5}}$ fuzzy controller
E EC NB NS ZO PS PB NB PB PB PB PM ZO NM PB PB PM PS ZO NS PM PM PS ZO NS ZO PM PS ZO NS NS PS PS ZO NS NM NM PS ZO NS NM NB NB PB ZO NM NB NB NB
下载: 导出CSV
表 4 出水水质限制
Table 4 Effluent quality limits
水质 上限值(mg/l) $S_{\rm {NH, e}}$ 4 $S_{\rm {Ntot, e}}$ 18 TSS 30 BOD$_5$ 10 COD 100
下载: 导出CSV
表 5 不同算法控制效果比较(出水指标、能耗和水质)
Table 5 Performance comparison for different control algorithms (effluent parameters, $OCI$ and $EQ$)
算法 EC $OCI$ (kWh/d) $EQ$ (kg poll.Units/d) $S_{\rm NH}$ (mg/l) $S_{\rm Ntot}$ (mg/l) TSS (mg/l) BOD$_5$ (mg/l) COD (mg/l) F1 2.3037 16.8006 12.6219 2.6763 47.5114 3 909.5 6 080.9 NSGA2-DLS 2.4389 17.5298 12.6200 2.6791 47.5189 3 688.1 6 203.9 DPSO[18] 3.2387 14.9184 12.6227 2.6894 47.5503 3 702.3 6 180.3 APSO[19] 3.1398 14.5995 12.9990 2.7660 48.0766 3 700.4 6 198.7 ESN[20] 2.8723 15.6014 12.5917 2.6784 47.5114 3 756.8 6 134.5
下载: 导出CSV
表 6 不同$S_{\rm{NH, e}}$和$S_{\rm {Ntot, e}}$峰值抑制方法效果对比
Table 6 Performance comparison for different $S_{\rm {NH, e}}$ and $S_{\rm {Ntot, e}}$ peak suppression methods
方法 $OCI$
(KWh/d)$EQ$ (kg poll.Units/d) $P$($S_{\rm{NH, e}}$)
(%)$P$($S_{\rm {Ntot, e}}$)
(%)决策优化控制 5 526.7 5 797.1 0 0 F2 6 268.6 5 350.1 0.74 0.77 Jeppsson 9 447.24 5 577.97 0.41 1.18 Nopens 9 348 5 447 0.92 * Flores-Alsina 8 024.5 5 022.5 0.2 0.25 Santín 6 289.59 5 318.95 0.15 0.0046
下载: 导出CSV
-
[1] Cristea S, de Prada C, Sarabia D, Gutiérrez G. Aeration control of a wastewater treatment plant using hybrid NMPC. Computers and Chemical Engineering, 2011, 35(4):638-650 doi: 10.1016/j.compchemeng.2010.07.021 [2] 乔俊飞, 韩改堂, 周红标.基于知识的污水生化处理过程智能优化方法.自动化学报, 2017, 43(6):1038-1046 http://www.aas.net.cn/CN/abstract/abstract19079.shtmlQiao Jun-Fei, Han Gai-Tang, Zhou Hong-Biao. Knowledge-based intelligent optimal control for wastewater biochemical treatment process. Acta Automatica Sinica, 2017, 43(6):1038-1046 http://www.aas.net.cn/CN/abstract/abstract19079.shtml [3] Han H G, Qiao J F. Adaptive dissolved oxygen control based on dynamic structure neural network. Applied Soft Computing, 2011, 11(4):3812-3820 doi: 10.1016/j.asoc.2011.02.014 [4] Mulas M, Tronci S, Corona F, Haimi H, Lindell P, Heinonen M, Vahala R, Baratti R. Predictive control of an activated sludge process:an application to the Viikinmäki wastewater treatment plant. Journal of Process Control, 2015, 35:89-100 doi: 10.1016/j.jprocont.2015.08.005 [5] Santín I, Pedret C, Vilanova R. Applying variable dissolved oxygen set point in a two level hierarchical control structure to a wastewater treatment process. Journal of Process Control, 2015, 28:40-55 doi: 10.1016/j.jprocont.2015.02.005 [6] Egea J A, Gracia I. Dynamic multiobjective global optimization of a waste water treatment plant for nitrogen removal. IFAC Proceedings Volumes, 2012, 45(2):374-379 doi: 10.3182/20120215-3-AT-3016.00066 [7] Yang T, Qiu W, Ma Y, Chadli M, Zhang L X. Fuzzy model-based predictive control of dissolved oxygen in activated sludge processes. Neurocomputing, 2014, 136:88-95 doi: 10.1016/j.neucom.2014.01.025 [8] Vega P, Revollar S, Francisco M, Martín J M. Integration of set point optimization techniques into nonlinear MPC for improving the operation of WWTPs. Computers and Chemical Engineering, 2014, 68:78-95 doi: 10.1016/j.compchemeng.2014.03.027 [9] Han H G, Qian H H, Qiao J F. Nonlinear multiobjective model-predictive control scheme for wastewater treatment process. Journal of Process Control, 2014, 24(3):47-59 doi: 10.1016/j.jprocont.2013.12.010 [10] Santín I, Pedret C, Vilanova R, Meneses M. Advanced decision control system for effluent violations removal in wastewater treatment plants. Control Engineering Practice, 2016, 49:60-75 doi: 10.1016/j.conengprac.2016.01.005 [11] Vilanova R, Katebi R, Wahab N. N-removal on wastewater treatment plants:a process control approach. Journal of Water Resource and Protection, 2011, 3(1):1-11 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_c11ccadf6598f6d3302cd38accd1e1b3 [12] 栗三一, 李文静, 乔俊飞.一种基于密度的局部搜索NSGA2算法.控制与决策, 2018, 33(1):60-66 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201801007Li San-Yi, Li Wen-Jing, Qiao Jun-Fei. A local search strategy based on density for NSGA2 algorithm. Control and Decision, 2018, 33(1):60-66 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201801007 [13] Jeppsson U, Pons M N. The COST benchmark simulation model-current state and future perspective. Control Engineering Practice, 2004, 12(3):299-304 doi: 10.1016/j.conengprac.2003.07.001 [14] Qiao J F, Li S Y, Li W J. Mutual information based weight initialization method for sigmoidal feedforward neural networks. Neurocomputing, 2016, 207:676-683 doi: 10.1016/j.neucom.2016.05.054 [15] Farajzadeh J, Fard A F, Lotfi S. Modeling of monthly rainfall and runoff of Urmia lake basin using "feed-forward neural network" and "time series analysis" model. Water Resources and Industry, 2014, 7-8:38-48 doi: 10.1016/j.wri.2014.10.003 [16] 乔俊飞, 薄迎春, 韩广.基于ESN的多指标DHP控制策略在污水处理过程中的应用.自动化学报, 2013, 39(7):1146-1151 http://www.aas.net.cn/CN/abstract/abstract18144.shtmlQiao Jun-Fei, Bo Ying-Chun, Han Guang. Application of ESN-based multi indices dual heuristic dynamic programming on wastewater treatment process. Acta Automatica Sinica, 2013, 39(7):1146-1151 http://www.aas.net.cn/CN/abstract/abstract18144.shtml [17] 韩红桂, 张璐, 乔俊飞.一种基于自适应回归核函数的污水处理能耗模型.化工学报, 2016, 67(3):947-953 http://d.old.wanfangdata.com.cn/Periodical/hgxb201603042Han Hong-Gui, Zhang Lu, Qiao Jun-Fei. An energy consumption model of wastewater treatment process based on adaptive regressive kernel function. CIESC Journal, 2016, 67(3):947-953 http://d.old.wanfangdata.com.cn/Periodical/hgxb201603042 [18] Messac A, Ismail-Yahaya A, Mattson C A. The normalized normal constraint method for generating the Pareto frontier. Structural and Multidisciplinary Optimization, 2003, 25(2):86-98 doi: 10.1007/s00158-002-0276-1 [19] Zeng G Q, Chen J, Li L M, Chen M R, Wu L, Dai Y X, Zheng C W. An improved multi-objective population-based extremal optimization algorithm with polynomial mutation. Information Sciences, 2016, 330:49-73 doi: 10.1016/j.ins.2015.10.010 [20] 史雄伟, 乔俊飞, 苑明哲.基于改进粒子群优化算法的污水处理过程优化控制.信息与控制, 2011, 40(5):698-703 http://d.old.wanfangdata.com.cn/Periodical/xxykz201105021Shi Xiong-Wei, Qiao Jun-Fei, Yuan Ming-Zhe. Optimal control for wastewater treatment process based on improved particle swarm optimization algorithm. Information and Control, 2011, 40(5):698-703 http://d.old.wanfangdata.com.cn/Periodical/xxykz201105021 [21] 乔俊飞, 逄泽芳, 韩红桂.基于改进粒子群算法的污水处理过程神经网络优化控制.智能系统学报, 2012, 7(5):429-436 doi: 10.3969/j.issn.1673-4785.201205034Qiao Jun-Fei, Pang Ze-Fang, Han Hong-Gui. Neural network optimal control for wastewater treatment process based on APSO. CAAI Transactions on Intelligent Systems, 2012, 7(5):429-436 doi: 10.3969/j.issn.1673-4785.201205034 [22] 乔俊飞, 王莉莉, 韩红桂.基于ESN的污水处理过程优化控制.智能系统学报, 2015, 10(6):831-837 http://d.old.wanfangdata.com.cn/Periodical/xdkjyc201506002Qiao Jun-Fei, Wang Li-Li, Han Hong-Gui. Optimal control for wastewater treatment process based on ESN neural network. CAAI Transactions on Intelligent Systems, 2015, 10(6):831-837 http://d.old.wanfangdata.com.cn/Periodical/xdkjyc201506002 [23] Jeppsson U, Pons M N, Nopens I, Alex J, Copp J B, Gernaey K V, Rosen C, Steyer J P, Vanrolleghem P A. Benchmark simulation model No 2:general protocol and exploratory case studies. Water Science and Technology, 2007, 56(8):67-78 doi: 10.2166/wst.2007.604 [24] Nopens I, Benedetti L, Jeppsson U, Pons M N, Alex J, Copp J B, Gernaey K V, Rosen C, Steyer J P, Vanrolleghem P A. Benchmark simulation model No 2:finalisation of plant layout and default control strategy. Water Science and Technology, 2010, 62(9):1967-1974 doi: 10.2166/wst.2010.044 [25] Flores-Alsina X, Comas J, Rodríguez R I, Poch M, Gernaey K V, Jeppsson U. Evaluation of plant-wide WWTP control strategies including the effects of filamentous bulking sludge. Water Science and Technology, 2009, 60(8):2093-2103 doi: 10.2166/wst.2009.523 -

 下载:
下载:



计量
- 文章访问数: 2996
- HTML全文浏览量: 578
- PDF下载量: 671
- 被引次数: 0
