

Practical Consensus of Leader-following Multi-agent System With Unknown Coupling Weights
-
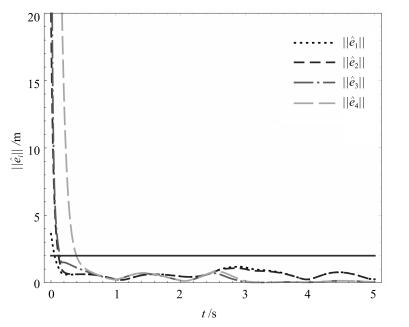
摘要: 一致性理论在许多领域有广泛应用.现有很多研究成果是关于恒同一致的.在实际中,由于任何系统都会不可避免地受到一定的外界扰动,要求误差函数的极限等于0是难以做到的,但当时间充分大时误差函数在可接受区间内是可行的.本文首先给出多智能体系统的实用一致性概念,然后研究含未知耦合权重的一阶非线性领导-跟随多智能体系统的实用一致性问题.通过设计合适的控制协议,运用图论、矩阵理论和强实用稳定性理论,得到该多智能体系统实现实用一致性的充分条件.数值模拟验证了理论结果的正确性.Abstract: Consensus theory has been widely applied to many fields. Most of the research is on identical consensus. In many practical cases, it is impossible for agents to achieve identical consensus because any system has certain disturbance. In this case, it cannot be achieved that the limit of the error function is equal to 0, but it is feasible that the value of the error function is bounded within an interval if the time is sufficiently large. In this paper, the concept of practical consensus is given, then the problem of practical consensus in leader-following multi-agent systems with unknown coupling weights is investigated. By designing an appropriate control protocol and using graph theory, matrix theory and strong practical stability theory, a sufficient condition is given to realize practical consensus of the multi-agent system. Numerical simulations are given to verify the theoretical results.
-
Key words:
- Multi-agent system /
- practical consensus /
- leader-following /
- strong practical stability
-
-
[1] Hu W F, Liu L, Feng G. Consensus of linear multi-agent systems by distributed event-triggered strategy. IEEE Transactions on Cybernetics, 2016, 46(1):148-157 doi: 10.1109/TCYB.2015.2398892 [2] Lu J Q, Ho D W C, Kurths J. Consensus over directed static networks with arbitrary finite communication delays. Physical Review E, 2009, 80(6): Article No. 066121 [3] Xiao F, Wang L, Chen J. Partial state consensus for networks of second-order dynamic agents. Systems and Control Letters, 2010, 59(12):775-781 doi: 10.1016/j.sysconle.2010.09.003 [4] Li T, Xie L H. Distributed consensus over digital networks with limited bandwidth and time-varying topologies. Automatica, 2011, 47(9):2006-2015 doi: 10.1016/j.automatica.2011.05.017 [5] 王沛, 吕金虎.基因调控网络的控制:机遇与挑战.自动化学报, 2013, 39(12):1969-1979 doi: 10.3724/SP.J.1004.2013.01969Wang Pei, Lv Jin-Hu. Control of genetic regulatory networks:opportunities and challenges. Acta Automatica Sinica, 2013, 39(12):1969-1979 doi: 10.3724/SP.J.1004.2013.01969 [6] Lu J Q, Zhong J, Huang C, Cao J D. On pinning controllability of Boolean control networks. IEEE Transactions on Automatic Control, 2016, 61(6):1658-1663 doi: 10.1109/TAC.2015.2478123 [7] Lu J Q, Ding C D, Lou J G, Cao J D. Outer synchronization of partially coupled dynamical networks via pinning impulsive controllers. Journal of the Franklin Institute, 2015, 352(11):5024-5041 doi: 10.1016/j.jfranklin.2015.08.016 [8] 赵俊, 刘国平.非完整性约束的平面多智能体位置时变一致性控制.自动化学报, 2017, 43(7):1169-1177 http://www.aas.net.cn/CN/Y2017/V43/I7/1169Zhao Jun, Liu Guo-Ping. Position time-varying consensus control for multiple planar agents with non-holonomic constraint. Acta Automatica Sinica, 2017, 43(7):1169-1177 http://www.aas.net.cn/CN/Y2017/V43/I7/1169 [9] Wang Z H, Xu J J, Zhang H S. Consensus seeking for discrete-time multi-agent systems with communication delay. IEEE/CAA Journal of Automatica Sinica, 2015, 2(2):151-157 doi: 10.1109/JAS.2015.7081654 [10] Zeng L, Hu G D. Consensus of linear multi-agent systems with communication and input delays. Acta Automatica Sinica, 2013, 39(7):1133-1140 doi: 10.1016/S1874-1029(13)60068-3 [11] Guan Z H, Hu B, Chi M, He D X, Cheng X M. Guaranteed performance consensus in second-order multi-agent systems with hybrid impulsive control. Automatica, 2014, 50(9):2415-2418 doi: 10.1016/j.automatica.2014.07.008 [12] 杨洪勇, 郭雷, 张玉玲, 姚秀明.离散时间分数阶多自主体系统的时延一致性.自动化学报, 2014, 40(9):2022-2028 http://www.aas.net.cn/CN/Y2014/V40/I9/2022Yang Hong-Yong, Guo Lei, Zhang Yu-Ling, Yao Xiu-Ming. Delay consensus of fractional-order multi-agent systems with sampling delays. Acta Automatica Sinica, 2014, 40(9):2022-2028 http://www.aas.net.cn/CN/Y2014/V40/I9/2022 [13] Li L L, Ho D W C, Lu J Q. A consensus recovery approach to nonlinear multi-agent system under node failure. Information Sciences, 2016, 367-368:975-989 doi: 10.1016/j.ins.2016.06.050 [14] Wen G G, Peng Z X, Rahmani A, Yu Y G. Distributed leader-following consensus for second-order multi-agent systems with nonlinear inherent dynamics. International Journal of Systems Science, 2014, 45(9):1892-1901 doi: 10.1080/00207721.2012.757386 [15] Ma Z J, Wang Y, Li X M. Cluster-delay consensus in first-order multi-agent systems with nonlinear dynamics. Nonlinear Dynamics, 2016, 83(3):1303-1310 doi: 10.1007/s11071-015-2403-8 [16] Peng K, Yang Y P. Leader-following consensus problem with a varying-velocity leader and time-varying delays. Physica A:Statistical Mechanics and Its Applications, 2009, 388(2-3):193-208 doi: 10.1016/j.physa.2008.10.009 [17] Wang Y, Ma Z J. Lag consensus of the second-order leader-following multi-agent systems with nonlinear dynamics. Neurocomputing, 2016, 171:82-88 doi: 10.1016/j.neucom.2015.06.020 [18] Dong X W, Xi J X, Shi Z Y, Zhong Y S. Practical consensus for high-order linear time-invariant swarm systems with interaction uncertainties, time-varying delays and external disturbances. International Journal of Systems Science, 2013, 44(10):1843-1856 doi: 10.1080/00207721.2012.670296 [19] Li L L, Ho D W C, Lu J Q. A unified approach to practical consensus with quantized data and time delay. IEEE Transactions on Circuits and Systems I:Regular Papers, 2013, 60(10):2668-2678 doi: 10.1109/TCSI.2013.2244322 [20] 廖晓昕.稳定性的数学理论及应用.第2版.武汉:华中师范大学出版社, 2001.Liao Xiao-Xin. Mathematical Theory of Stability and Its Application (2nd edition). Wuhan:Central China Normal University Press, 2001. [21] Liu B, Lu W L, Chen T P. New conditions on synchronization of networks of linearly coupled dynamical systems with non-Lipschitz right-hand sides. Neural Networks, 2012, 25:5-13 doi: 10.1016/j.neunet.2011.07.007 [22] Wu W, Chen T P. Partial synchronization in linearly and symmetrically coupled ordinary differential systems. Physica D:Nonlinear Phenomena, 2009, 238(4):355-364 doi: 10.1016/j.physd.2008.10.012 [23] Bhatia R. Matrix Analysis. New York: Springer, 1996. [24] Shil'nikov L P. Chua's circuit:rigorous results and future problems. IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications, 1993, 40(10):784-786 doi: 10.1109/81.246153 -

 下载:
下载:

图(3)
计量
- 文章访问数: 1883
- HTML全文浏览量: 309
- PDF下载量: 555
- 被引次数: 0
