

Parallel Measurements: A New Theory and Framework for Complex Measurement System and A Case Study
-
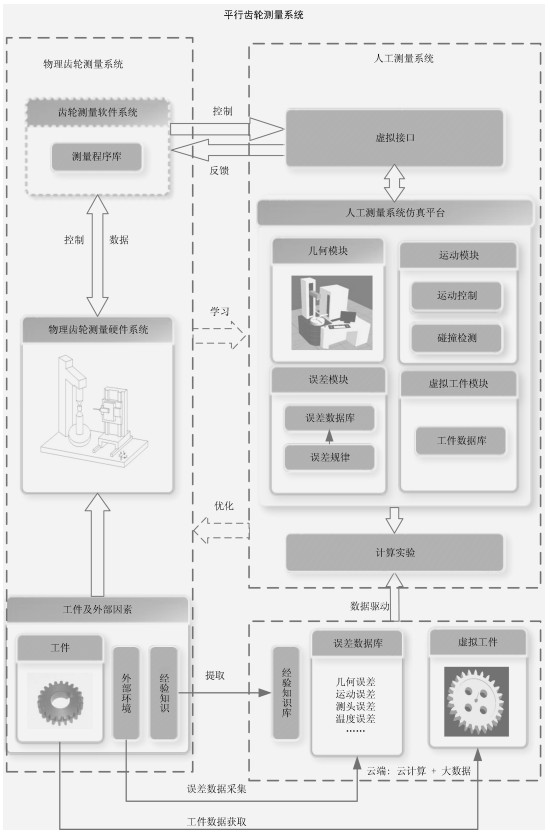
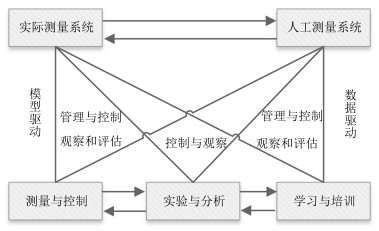
摘要: 分析了复杂测量系统的溯源研究现状,指出现有的研究已不能满足复杂测量系统的动态化溯源需求,提出了建立人工测量系统的必要性.基于ACP(Artificial societies,computational experiments,and parallel execution)方法建立了平行测量系统的理论框架,通过构建与物理测量系统行为和特性等价的人工测量系统,借助人工测量系统的计算实验,确定测量优化控制策略,引导物理测量系统的运行,并进行评估,实现物理测量系统和人工测量系统的平行执行和平行控制,将物理测量系统溯源至人工测量系统的理论模型上,解决复杂测量系统的溯源问题.并以齿轮在位测量系统为例,对平行齿轮测量系统进行了设计和平行控制研究.Abstract: The necessity of artificial measuring system is presented by analyzing the state of the art on the traceability for complex measuring systems and pointing out the fact that the current studies cannot meet the requirement of dynamic traceability of a complex measurement system. A theoretical framework of parallel measuring system is proposed based on the ACP (Artificial societies, computational experiments, and parallel execution) method. By constructing an artificial measuring system equivalent to physical measuring system in behaviors and characteristics, computational experiments of artificial measuring system are utilized to determine the optimal control strategy and to guide and evaluate the implementation of the physical measuring system, leading to final realization of the parallel execution and parallel control between the physical and the artificial measuring systems. The physical measurement system can be traced back to the theoretical model of manual measurement system to solve the problem of traceability of complex measuring system. Taking an in-site gear measuring system as an example, a parallel gear measuring system is designed and its parallel control is studied.1) 本文责任编委 李鸿一
-
[1] 裘祖荣, 石照耀, 李岩.机械制造领域测量技术的发展研究.机械工程学报, 2010, 46(14):1-11 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jxxb201014003&dbname=CJFD&dbcode=CJFQQiu Zu-Rong, Shi Zhao-Yao, Li Yan. Research on the development of measurement technology mechanical manufacture. Journal of Mechanical Engineering, 2010, 46(14):1-11 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jxxb201014003&dbname=CJFD&dbcode=CJFQ [2] 石照耀, 张斌, 林家春, 张华.坐标测量技术半世纪-演变与趋势.北京工业大学学报, 2011, 37(5):648-656 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=bjgd201105003&dbname=CJFD&dbcode=CJFQShi Zhao-Yao, Zhang Bin, Lin Jia-Chun, Zhang Hua. Half century of coordinate metrology technology-evolution and trends. Journal of Beijing University of Technology, 2011, 37(5):648-656 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=bjgd201105003&dbname=CJFD&dbcode=CJFQ [3] Härtig F, Rost K, Goch G. Large gear material standard for the traceability of gears for transmission manufacturing. In: Proceedings of 2010 International Conference on Gears: Europe Invites the World. Garching, Germany, 2010. 991-1004 [4] Komori M, Takeoka F, Kondo K, Kondo Y, Takatsuji T, Osawa S, et al. Design method of double ball artifact for use in evaluating the accuracy of a gear-measuring instrument. Journal of Mechanical Design, 2010, 132(7):Article No.071010 https://repository.kulib.kyoto-u.ac.jp/dspace/handle/2433/146221 [5] Kondo Y, Kondo K, Osawa S, Sato O, Komori M, Takeoka F, et al. Evaluation of instruments for helix measurement using wedge artifact. Precision Engineering, 2010, 34(4):667-674 doi: 10.1016/j.precisioneng.2010.01.008 [6] 王飞跃.平行系统方法与复杂系统的管理和控制.控制与决策, 2004, 19(5):485-489, 514 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=kzyc200405001&dbname=CJFD&dbcode=CJFQWang Fei-Yue. Parallel system methods for management and control of complex systems. Control and Decision, 2004, 19(5):485-489, 514 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=kzyc200405001&dbname=CJFD&dbcode=CJFQ [7] 王飞跃.人工社会、计算实验、平行系统-关于复杂社会经济系统计算研究的讨论.复杂系统与复杂性科学, 2004, 1(4):25-35 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=fzxt200404001&dbname=CJFD&dbcode=CJFQWang Fei-Yue. Artificial societies, computational experiments, and parallel systems:a discussion on computational theory of complex social-economic systems. Complex Systems and Complexity Science, 2004, 1(4):25-35 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=fzxt200404001&dbname=CJFD&dbcode=CJFQ [8] 王飞跃, 史帝夫·兰森.从人工生命到人工社会-复杂社会系统研究的现状和展望.复杂系统与复杂性科学, 2004, 1(1):33-41 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=xhyk200405030&dbname=CJFD&dbcode=CJFQWang Fei-Yue, Lansing J S. From artificial life to artificial societies-new methods for studies of complex social systems. Complex Systems and Complexity Science, 2004, 1(1):33-41 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=xhyk200405030&dbname=CJFD&dbcode=CJFQ [9] 王飞跃.关于复杂系统的建模、分析、控制和管理.复杂系统与复杂性科学, 2006, 3(2):26-34 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=fzxt200602003&dbname=CJFD&dbcode=CJFQWang Fei-Yue. On the modeling, analysis, control and management of complex systems. Complex Systems and Complexity Science, 2006, 3(2):26-34 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=fzxt200602003&dbname=CJFD&dbcode=CJFQ [10] 王飞跃.平行控制:数据驱动的计算控制方法.自动化学报, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtmlWang Fei-Yue. Parallel control:a method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtml [11] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtmlWang Fei-Yue. Software-defined systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtml [12] Wang F Y. Parallel control and management for intelligent transportation systems:concepts, architectures, and applications. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3):630-638 doi: 10.1109/TITS.2010.2060218 [13] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃.平行学习-机器学习的一个新型理论框架.自动化学报, 2017, 43(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18984.shtmlLi Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning-a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18984.shtml [14] 邓建玲, 王飞跃, 陈耀斌, 赵向阳.从工业4.0到能源5.0:智能能源系统的概念、内涵及体系框架.自动化学报, 2015, 41(12):2003-2016 http://www.aas.net.cn/CN/abstract/abstract18774.shtmlDeng Jian-Ling, Wang Fei-Yue, Chen Yao-Bin, Zhao Xiang-Yang. From Industries 4.0 to Energy 5.0:concept and framework of intelligent energy systems. Acta Automatica Sinica, 2015, 41(12):2003-2016 http://www.aas.net.cn/CN/abstract/abstract18774.shtml [15] Zhang N, Wang F Y, Zhu F H, Zhao D B, Tang S M. DynaCAS:computational experiments and decision support for ITS. IEEE Intelligent Systems, 2008, 23(6):19-23 doi: 10.1109/MIS.2008.101 [16] 王坤峰, 苟超, 王飞跃.平行视觉:基于ACP的智能视觉计算方法.自动化学报, 2016, 42(10):1490-1500 http://www.aas.net.cn/CN/abstract/abstract18936.shtmlWang Kun-Feng, Gou Chao, Wang Fei-Yue. Parallel vision:an ACP-based approach to intelligent vision computing. Acta Automatica Sinica, 2016, 42(10):1490-1500 http://www.aas.net.cn/CN/abstract/abstract18936.shtml [17] 刘小明, 李正熙.城市客运交通枢纽平行系统体系研究.自动化学报, 2014, 40(12):2756-2765 http://www.aas.net.cn/CN/abstract/abstract18555.shtmlLiu Xiao-Ming, Li Zheng-Xi. Parallel systems for urban passenger transport hub. Acta Automatica Sinica, 2014, 40(12):2756-2765 http://www.aas.net.cn/CN/abstract/abstract18555.shtml [18] 黄文德, 王威, 徐昕, 郗晓宁.基于ACP方法的载人登月中止规划的计算实验研究.自动化学报, 2012, 38(11):1794-1803 http://www.aas.net.cn/CN/abstract/abstract17785.shtmlHuang Wen-De, Wang Wei, Xu Xin, Xi Xiao-Ning. Computational experiments for abort planning of manned lunar landing mission based on ACP approach. Acta Automatica Sinica, 2012, 38(11):1794-1803 http://www.aas.net.cn/CN/abstract/abstract17785.shtml [19] 秦蕊, 曾帅, 李娟娟, 袁勇.基于深度强化学习的平行企业资源计划.自动化学报, 2017, 43(9):1588-1596 http://www.aas.net.cn/CN/abstract/abstract19135.shtmlQin Rui, Zeng Shuai, Li Juan-Juan, Yuan Yong. Parallel enterprises resource planning based on deep reinforcement learning. Acta Automatica Sinica, 2017, 43(9):1588-1596 http://www.aas.net.cn/CN/abstract/abstract19135.shtml [20] 白天翔, 王帅, 沈震, 曹东璞, 郑南宁, 王飞跃.平行机器人与平行无人系统:框架、结构、过程、平台及其应用.自动化学报, 2017, 43(2):161-175 http://www.aas.net.cn/CN/abstract/abstract18998.shtmlBai Tian-Xiang, Wang Shuai, Shen Zhen, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel robotics and parallel unmanned systems:framework, structure, process, platform and applications. Acta Automatica Sinica, 2017, 43(2):161-175 http://www.aas.net.cn/CN/abstract/abstract18998.shtml [21] Wang F Y. Control 5.0:from Newton to Merton in popper's cyber-social-physical spaces. IEEE/CAA Journal of Automatica Sinica, 2016, 3(3):233-234 doi: 10.1109/JAS.2016.7508796 [22] Wang F Y, Zhang J J, Zheng X H, Wang X, Yuan Y, Dai X X, et al. Where does AlphaGo Go:from Church-Turing thesis to AlphaGo thesis and beyond. IEEE/CAA Journal of Automatica Sinica, 2016, 3(2):113-120 doi: 10.1109/JAS.2016.7471613 [23] Wang F Y, Wang X, Li L X, Li L. Steps toward parallel intelligence. IEEE/CAA Journal of Automatica Sinica, 2016, 3(4):345-348 doi: 10.1109/JAS.2016.7510067 [24] Wang F Y, Zhang J, Wei Q L, Zheng X H, Li L. PDP:parallel dynamic programming. IEEE/CAA Journal of Automatica Sinica, 2017, 4(1):1-5 doi: 10.1109/JAS.2017.7510310 [25] Kang M Z, Wang F Y. From parallel plants to smart plants:intelligent control and management for plant growth. IEEE/CAA Journal of Automatica Sinica, 2017, 4(2):161-166 doi: 10.1109/JAS.2017.7510487 [26] Li L, Lin Y L, Zheng N N, Wang F Y. Parallel Learning:a perspective and a framework. IEEE/CAA Journal of Automatica Sinica, 2017, 4(3):389-395 doi: 10.1109/JAS.2017.7510493 [27] Wang F Y, Zheng N N, Cao D P, Martinez C M, Li L, Liu T. Parallel driving in CPSS:a unified approach for transport automation and vehicle intelligence. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4):577-587 doi: 10.1109/JAS.2017.7510598 [28] Zhang J J, Wang F Y, Wang Q, Hao D Z, Yang X J, Gao D W, et al. Parallel dispatch:a new paradigm of electrical power system dispatch. IEEE/CAA Journal of Automatica Sinica, 2018, 5(1):311-319 doi: 10.1109/JAS.2017.7510778 [29] 袁勇, 王飞跃.平行区块链:概念、方法与内涵解析.自动化学报, 2017, 43(10):1703-1712 http://www.aas.net.cn/CN/abstract/abstract19148.shtmlYuan Yong, Wang Fei-Yue. Parallel Blockchain:concept, methods and issues. Acta Automatica Sinica, 2017, 43(10):1703-1712 http://www.aas.net.cn/CN/abstract/abstract19148.shtml [30] Wang K F, Gou C, Zheng N N, Rehg J M, Wang F Y. Parallel vision for perception and understanding of complex scenes:methods, framework, and perspectives. Artificial Intelligence Review, 2017, 48(3):299-329 doi: 10.1007/s10462-017-9569-z [31] 王坤峰, 鲁越, 王雨桐, 熊子威, 王飞跃.平行图像:图像生成的一个新型理论框架.模式识别与人工智能, 2017, 30(7):577-587 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=mssb201707001&dbname=CJFD&dbcode=CJFQWang Kun-Feng, Lu Yue, Wang Yu-Tong, Xiong Zi-Wei, Wang Fei-Yue. Parallel imaging:a new theoretical framework for image generation. Pattern Recognition and Artificial Intelligence, 2017, 30(7):577-587 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=mssb201707001&dbname=CJFD&dbcode=CJFQ [32] 刘昕, 王晓, 张卫山, 汪建基, 王飞跃.平行数据:从大数据到数据智能.模式识别与人工智能, 2017, 30(8):673-681 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=mssb201708001&dbname=CJFD&dbcode=CJFQLiu Xin, Wang Xiao, Zhang Wei-Shan, Wang Jian-Ji, Wang Fei-Yue. Parallel data:from big data to data intelligence. Pattern Recognition and Artificial Intelligence, 2017, 30(8):673-681 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=mssb201708001&dbname=CJFD&dbcode=CJFQ [33] 王飞跃, 张梅, 孟祥冰, 王蓉, 王晓, 张志成, 等.平行手术:基于ACP的智能手术计算方法.模式识别与人工智能, 2017, 30(11):961-970 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=mssb201711001&dbname=CJFD&dbcode=CJFQWang Fei-Yue, Zhang Mei, Meng Xiang-Bing, Wang Rong, Wang Xiao, Zhang Zhi-Cheng, et al. Parallel surgery:an ACP-based approach for intelligent operations. Pattern Recognition and Artificial Intelligence, 2017, 30(11):961-970 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=mssb201711001&dbname=CJFD&dbcode=CJFQ [34] 王飞跃, 李长贵, 国元元, 王静, 王晓, 邱天雨, 等.平行高特:基于ACP的平行痛风诊疗系统框架.模式识别与人工智能, 2017, 30(12):1057-1068 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=mssb201712001&dbname=CJFD&dbcode=CJFQWang Fei-Yue, Li Chang-Gui, Guo Yuan-Yuan, Wang Jing, Wang Xiao, Qiu Tian-Yu, et al. Parallel gout:an ACP-based system framework for gout diagnosis and treatment. Pattern Recognition and Artificial Intelligence, 2017, 30(12):1057-1068 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=mssb201712001&dbname=CJFD&dbcode=CJFQ [35] Wilhelm R G, Hocken R, Schwenke H. Task specific uncertainty in coordinate measurement. CIRP Annals, 2001, 50(2):553-563 doi: 10.1016/S0007-8506(07)62995-3 [36] ISO. Geometrical Product Specifications (GPS)-Coordinate Measuring Machines (CMM): Technique for Determining the Uncertainty of Measurement-Part 3: Use of Calibrated Workpieces or Measurement Standards, ISO 15530-3, 2011. [37] Arencibia R V, Souza C C, Costa H L, Piratelli-Filho A. Simplified model to estimate uncertainty in CMM. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2015, 37(1):411-421 doi: 10.1007/s40430-014-0157-8 [38] Jakubiec W, Plowucha W, Starczak M. Analytical estimation of coordinate measurement uncertainty. Measurement, 2012, 45(10):2299-2308 doi: 10.1016/j.measurement.2011.09.027 [39] Trenk M, Franke M, Schwenke H. The "virtual CMM" a software tool for uncertainty evaluation-practical application in a calibration lab[Online], available: http://www.aspe.net/publications/Summer_2004/04SU%20Extended%20Abstracts/Trenk-1670.PDF, October 17, 2017. [40] Takeoka F, Komori M, Takahashi M, Kubo A, Takatsuji T, Osawa S, et al. Gear checker analysis and evaluation using a virtual gear checker. Measurement Science and Technology, 2009, 20(4):Article No.045104 doi: 10.1088/0957-0233/20/4/045104 [41] 石照耀, 张宇, 张白.三坐标机测量齿轮齿廓的不确定度评价.光学精密工程, 2012, 20(4):766-771 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm201204014&dbname=CJFD&dbcode=CJFQShi Zhao-Yao, Zhang Yu, Zhang Bai. Uncertainty evaluation of CMM measurement for gear profile. Optics and Precision Engineering, 2012, 20(4):766-771 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm201204014&dbname=CJFD&dbcode=CJFQ [42] 安冬, 盖绍彦, 达飞鹏.一种新的基于条纹投影的三维轮廓测量系统模型.光学学报, 2014, 34(5):Article No.0512004 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxxb201405021&dbname=CJFD&dbcode=CJFQAn Dong, Gai Shao-Yan, Da Fei-Peng. A new model of three-dimensional shape measurement system based on fringe projection. Acta Optica Sinica, 2014, 34(5):Article No.0512004 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxxb201405021&dbname=CJFD&dbcode=CJFQ [43] 盖绍彦, 达飞鹏.一种新的相位法三维轮廓测量系统模型及其标定方法研究.自动化学报, 2007, 33(9):902-910 http://www.aas.net.cn/CN/abstract/abstract17276.shtmlGai Shao-Yan, Da Fei-Peng. A new model of 3D shape measurement system based on phase measuring profilometry and its calibration. Acta Automatica Sinica, 2007, 33(9):902-910 http://www.aas.net.cn/CN/abstract/abstract17276.shtml [44] 刘源. 三维几何模型的重建与结构优化[博士学位论文], 中国科学技术大学, 中国, 2015 http://cdmd.cnki.com.cn/Article/CDMD-10358-1015615261.htmLiu Yuan. Reconstruction and Structural Optimization of 3D Geometric Models[Ph. D. dissertation], University of Science and Technology of China, China, 2015 http://cdmd.cnki.com.cn/Article/CDMD-10358-1015615261.htm [45] 陈光胜, 梅雪松, 陶涛.一种四轴联动机床转台运动误差的快速检测及分离方法.西安交通大学学报, 2011, 45(9):6-10 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=xajt201109003&dbname=CJFD&dbcode=CJFQChen Guang-Sheng, Mei Xue-Song, Tao Tao. Convenient strategy for identifying motion errors from rotary table of 4-axis simultaneous control machine tools. Journal of Xi'an Jiaotong University, 2011, 45(9):6-10 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=xajt201109003&dbname=CJFD&dbcode=CJFQ [46] Schwenke H, Knapp W, Haitjema H, Weckenmann A, Schmitt R, Delbressine F. Geometric error measurement and compensation of machines-an update. CIRP Annals, 2008, 57(2):660-675 doi: 10.1016/j.cirp.2008.09.008 [47] 费业泰, 赵静, 王宏涛, 马修水.三坐标测量机动态误差研究分析.仪器仪表学报, 2004, 25(S1):773-776 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=yqxb2004s1329&dbname=CJFD&dbcode=CJFQFei Ye-Tai, Zhao Jing, Wang Hong-Tao, Ma Xiu-Shui. A review of research on dynamic errors of coordinate measuring machines. Chinese Journal of Scientific Instrument, 2004, 25(S1):773-776 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=yqxb2004s1329&dbname=CJFD&dbcode=CJFQ [48] 林慎旺. 三坐标测量机精度检测评定及虚拟坐标系统研究[博士学位论文], 合肥工业大学, 中国, 2004 http://cdmd.cnki.com.cn/Article/CDMD-10359-2005011890.htmLin Shen-Wang. Study of Accuracy Inspection and Evaluation of Coordinate Measuring Machine and Virtual Coordinate System[Ph. D. dissertation], Hefei University of Technology, China, 2004 http://cdmd.cnki.com.cn/Article/CDMD-10359-2005011890.htm [49] 武二永, 项志宇, 刘济林.鲁棒的机器人蒙特卡洛定位算法.自动化学报, 2008, 34(8):907-911 http://www.aas.net.cn/CN/abstract/abstract13441.shtmlWu Er-Yong, Xiang Zhi-Yu, Liu Ji-Lin. Robust robot Monte Carlo localization. Acta Automatica Sinica, 2008, 34(8):907-911 http://www.aas.net.cn/CN/abstract/abstract13441.shtml [50] Rost K, Wendt K, Härtig F. Evaluating a task-specific measurement uncertainty for gear measuring instruments via Monte Carlo simulation. Precision Engineering, 2016, 44:220-230 doi: 10.1016/j.precisioneng.2016.01.001 [51] 白旭.测量系统分析(MSA)在计量工作中的应用.计量与测试技术, 2007, 34(9):58-59 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jlys200709038&dbname=CJFD&dbcode=CJFQBai Xu. Application of measurement systems analysis to metrology. Metrology & Measurement Technique, 2007, 34(9):58-59 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jlys200709038&dbname=CJFD&dbcode=CJFQ [52] 石照耀, 费业泰, 谢华锟.齿轮测量技术100年-回顾与展望.中国工程科学, 2003, 5(9):13-17 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jdgj200312013&dbname=CJFD&dbcode=CJFQShi Zhao-Yao, Fei Ye-Tai, Xie Hua-Kun. 100 Years of gear measurement technology:review & prospect. Engineering Science, 2003, 5(9):13-17 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jdgj200312013&dbname=CJFD&dbcode=CJFQ [53] 劳奇成, 刘志红.虚拟CNC齿轮测量中心的建模和过程仿真.西安工业大学学报, 2007, 27(5):426-430, 435 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=xagy200705006&dbname=CJFD&dbcode=CJFQLao Qi-Cheng, Liu Zhi-Hong. Modeling and process simulation of a virtual CNC gear measuring center. Journal of Xi'an Technological University, 2007, 27(5):426-430, 435 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=xagy200705006&dbname=CJFD&dbcode=CJFQ [54] 白玉羚, 劳奇成.虚拟齿轮测量中心的运动建模研究.工具技术, 2009, 43(2):85-87 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gjjs200902035&dbname=CJFD&dbcode=CJFQBai Yu-Ling, Lao Qi-Cheng. Research on motion modeling of virtual gear measuring center. Tool Engineering, 2009, 43(2):85-87 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gjjs200902035&dbname=CJFD&dbcode=CJFQ [55] 陈虹. 虚拟齿轮测量中心可视化系统的设计与开发[硕士学位论文], 西安工业大学, 中国, 2011 http://cdmd.cnki.com.cn/Article/CDMD-10702-1011078857.htmChen Hong. Design and Implementation of the Visualization System of Virtual Gear Measuring Center[Master thesis], Xi'an Technological University, China, 2011 http://cdmd.cnki.com.cn/Article/CDMD-10702-1011078857.htm [56] 谭传超. 虚拟CNC齿轮测量中心的运动控制和系统整合[硕士学位论文], 西安工业大学, 中国, 2012 http://cdmd.cnki.com.cn/Article/CDMD-10702-1012325416.htmTan Chuan-Chao. The Motion Control Module and System Integration of the Virtual CNC Gear Measuring Center System[Master thesis], Xi'an Technological University, China, 2012 http://cdmd.cnki.com.cn/Article/CDMD-10702-1012325416.htm [57] 黄煜. 虚拟齿轮测量中心的扫描检测技术[硕士学位论文], 西安工业大学, 中国, 2013 http://cdmd.cnki.com.cn/Article/CDMD-10702-1013174498.htmHuang Yu. Scanning for Detecting Algorithm Base on Virtual Gear Measuring Center[Master thesis], Xi'an Technological University, China, 2013 http://cdmd.cnki.com.cn/Article/CDMD-10702-1013174498.htm [58] Wang J H, Yin P L, Lao Q C, Huang Y. Geometric modeling of spiral bevel gear under virtual reality. Applied Mechanics and Materials, 2013, 288:208-213 doi: 10.4028/www.scientific.net/AMM.288 -

 下载:
下载:


图(3)
计量
- 文章访问数: 2781
- HTML全文浏览量: 408
- PDF下载量: 820
- 被引次数: 0
