

A Control Method of Unmanned Car Following Under Time-varying Relative Distance and Angle
-
摘要: 本文考虑实际道路上的车辆跟随运行模式,研究了无人车以时变的相对距离和相对角度跟随行驶的控制问题.本文首先采用领航跟随模式建立了领航车与跟随车之间的误差模型,将无人车之间的相对距离和相对角度作为时变量输入.接着使用反馈控制法设计了跟随车速度控制器和角速度控制器.用李雅普诺夫方法证明了控制器的稳定性,用Barbalat引理从理论上证明了跟踪误差渐近收敛.最后用Matlab/Simulink对无人车的跟随控制进行仿真,仿真结果表明在无人车之间的相对距离和相对角度是时变量的条件下,跟随车可以很好地沿着领航车的前进轨迹跟随行驶.Abstract: This paper presents an unmanned car following control method using time-varying relative distance and relative angle in vehicle following operation mode on actual road. Firstly, an error model between leading car and following car in the leader-follower mode is established with the relative distance and angle between unmanned cars being the input as time variables. Secondly, a feedback control method is used to design follower's speed controller and angular velocity controller. The stability of the designed controller is theoretically proved by using the Lyapunov method, and asympotic convergence of tracking errors is proved by using the Barbalat lemma as well. Finally, under the condition of expected time-varying relative distance and angle, simulation on a following control of two unmanned cars following travel is performed by Matlab/Simulink. The result shows that the following car can travel along the leading car's trajectory well.1) 本文责任编委 魏庆来
-
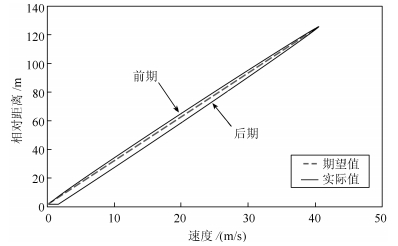
图 8 两车相对距离与领航车速度关系曲线
Fig. 8 The relationship between relative distance between unmanned cars and the speed of the leader car
-
[1] 杨帆, 云美萍, 杨晓光.基于多智能体的车路协同环境下单车道微观交通流模型.同济大学学报(自然科学版), 2012, 40(8):1189-1196 doi: 10.3969/j.issn.0253-374x.2012.08.012Yang Fan, Yun Mei-Ping, Yang Xiao-Guang. Single lane microscopic traffic flow model based on multi-agent in CVIS circumstance. Journal of Tongji University (Natural Science), 2012, 40(8):1189-1196 doi: 10.3969/j.issn.0253-374x.2012.08.012 [2] Dethe N S, Shevatkar V S, Bijwe R P. Google driverless car. International Journal of Scientific Research in Science, Engfineering and Technology, 2011, 21(2):2394-4099 http://d.old.wanfangdata.com.cn/Periodical/qcdq201712006 [3] 王家恩, 陈无畏, 王檀彬, 汪明磊, 肖灵芝.基于期望横摆角速度的视觉导航智能车辆横向控制.机械工程学报, 2012, 48(4):108-115 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201204018Wang Jia-En, Chen Wu-Wei, Wang Tan-Bin, Wang Ming-Lei, Xiao Ling-Zhi. Vision guided intelligent vehicle lateral control based on desired yaw rate. Journal of Mechanical Engineering, 2012, 48(4):108-115 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201204018 [4] 田涛涛, 侯忠生, 刘世达, 邓志东.基于无模型自适应控制的无人驾驶汽车横向控制方法.自动化学报, 2017, 43(11):1931-1940 http://www.aas.net.cn/CN/abstract/abstract19168.shtmlTian Tao-Tao, Hou Zhong-Sheng, Liu Shi-Da, Deng Zhi-Dong. Model-free adaptive control based lateral control of self-driving car. Acta Automatica Sinica, 2017, 43(11):1931-1940 http://www.aas.net.cn/CN/abstract/abstract19168.shtml [5] 刘伟, 肖旭辉, 魏敬东.无人驾驶汽车横向滑模控制仿真研究.北京汽车, 2017, (4):31-34 http://d.old.wanfangdata.com.cn/Periodical/bjqc201704009Liu Wei, Xiao Xu-Hui, Wei Jing-Dong. Simulation study on horizontal sliding mode control of driverless cars. Beijing Automotive Engineering, 2017, (4):31-34 http://d.old.wanfangdata.com.cn/Periodical/bjqc201704009 [6] Nouveliére L, Mammar S D. Experimental vehicle longitudinal control using a second order sliding mode technique. Control Engineering Practice, 2007, 15(8):943-954 doi: 10.1016/j.conengprac.2006.11.011 [7] Li R M, Zhang L W, Han L, Wang J. Multiple vehicle formation control based on robust adaptive control algorithm. IEEE Intelligent Transportation Systems Magazine, 2017, 9(2):41-51 doi: 10.1109/MITS.2017.2666581 [8] Peters A A, Middleton R H, Mason O. Cyclic interconnection for formation control of 1-D vehicle strings. European Journal of Control, 2016, 27:36-44 doi: 10.1016/j.ejcon.2015.12.002 [9] Wang P K C. Navigation strategies for multiple autonomous mobile robots moving in formation. In: Proceedings of 1989 IEEE/RSJ International Workshop on Intelligent Robots and Systems' 89. Tsukuba, Japan, Japan: IEEE, 1989. 486-493 [10] No T S, Chong K T, Roh D H. A Lyapunov function approach to longitudinal control of vehicles in a platoon. IEEE Transactions on Vehicular Technology, 2000, 50(1):116-124 doi: 10.1299-jsmec.47.653/ [11] 任殿波, 张继业, 李维军.基于滑模控制的时滞自动车辆跟随系统数学模型.公路交通科技, 2008, 25(1):142-145 doi: 10.3969/j.issn.1002-0268.2008.01.028Ren Dian-Bo, Zhang Ji-Ye, Li Wei-Jun. Mathematical model of automated vehicle following system with delay based on sliding model control method. Journal of Highway and Transportation Research and Development, 2008, 25(1):142-145 doi: 10.3969/j.issn.1002-0268.2008.01.028 [12] 任殿波, 张京明, 崔胜民, 张继业.基于向量Lyapunov函数方法的顾前顾后型车辆跟随控制.中南大学学报(自然科学版), 2010, 41(6):2195-2200 http://d.old.wanfangdata.com.cn/Periodical/zngydxxb201006025Ren Dian-Bo, Zhang Jing-Ming, Cui Sheng-Min, Zhang Ji-Ye. Vehicle following control using front and back information based on vector Lyapunov function. Journal of Central South University (Science and Technology), 2010, 41(6):2195-2200 http://d.old.wanfangdata.com.cn/Periodical/zngydxxb201006025 [13] 玄建永, 陆耿, 王京春.基于缩微智能车的车辆跟随控制系统.信息与控制, 2014, 43(2):165-170 http://d.old.wanfangdata.com.cn/Periodical/xxykz201402007Xuan Jian-Yong, Lu Geng, Wang Jing-Chun. Vehicle following control system based on micro smart car. Information and Control, 2014, 43(2):165-170 http://d.old.wanfangdata.com.cn/Periodical/xxykz201402007 [14] 钱方.基于反馈线性化的车辆编队控制[硕士学位论文], 大连海事大学, 中国, 2011 http://cdmd.cnki.com.cn/Article/CDMD-10151-1011110855.htmQian Fang. Vehicle formation control based on feedback linearization[Master dissertation], Dalian Maritime University, China, 2011 http://cdmd.cnki.com.cn/Article/CDMD-10151-1011110855.htm [15] 侯德藻, 刘刚, 高锋, 李克强, 连小珉.新型汽车主动避撞安全距离模型.汽车工程, 2005, 27(2):186-190 doi: 10.3321/j.issn:1000-680X.2005.02.015Hou De-Zao, Liu Gang, Gao Feng, Li Ke-Qiang, Lian Xiao-Min. A new safety distance model for vehicle collision avoidance. Automotive Engineering, 2005, 27(2):186-190 doi: 10.3321/j.issn:1000-680X.2005.02.015 [16] 赵明, 林茂松, 黄玉清.基于动态φ值的领航跟随法多机器人编队控制.西南科技大学学报(自然科学版), 2013, 28(4):57-61 http://d.old.wanfangdata.com.cn/Periodical/xngxyxb201304011Zhao Ming, Lin Mao-Song, Huang Yu-Qing. Leader-following formation control of multi-robots based on dynamic value of φ. Journal of Southwest University of Science and Technology, 2013, 28(4):57-61 http://d.old.wanfangdata.com.cn/Periodical/xngxyxb201304011 [17] 范家璐, 姜艺, 柴天佑.无线网络环境下工业过程运行反馈控制方法.自动化学报, 2016, 42(8):1166-1174 http://www.aas.net.cn/CN/abstract/abstract18906.shtmlFan Jia-Lu, Jiang Yi, Chai Tian-You. Operational feedback control of industrial processes in a wireless network environment. Acta Automatica Sinica, 2016, 42(8):1166-1174 http://www.aas.net.cn/CN/abstract/abstract18906.shtml [18] 闵颖颖, 刘允刚. Barbalat引理及其在系统稳定性分析中的应用.山东大学学报(工学版), 2007, 37(1):51-55 doi: 10.3969/j.issn.1672-3961.2007.01.013Min Ying-Ying, Liu Yun-Gang. Barbalat lemma and its application in analysis of system stability. Journal of Shandong University, 2007, 37(1):51-55 doi: 10.3969/j.issn.1672-3961.2007.01.013 [19] 俞志英, 郭戈.基于自适应卡尔曼滤波的车辆编队控制.辽宁工程技术大学学报(自然科学版), 2016, (11):1312-1315 doi: 10.11956/j.issn.1008-0562.2016.11.021Yu Zhi-Ying, Guo Ge. Vehicle formation control based on adaptive Kalman filter. Journal of Liaoning Technical University (Natural Science), 2016, (11):1312-1315 doi: 10.11956/j.issn.1008-0562.2016.11.021 [20] Guo X G, Wang J L, Liao F, Teo R S H. Distributed adaptive sliding mode control strategy for vehicle-following systems with nonlinear acceleration uncertainties. IEEE Transactions on Vehicular Technology, 2017, 66(2):981-991 doi: 10.1109/TVT.2016.2556938 [21] Dixon W E, Dawson D M, Zergeroglu E, Behal A. Nonlinear Control of Wheeled Mobile Robots. London: Springer, 2001. [22] Wu Z H, Huang N E. A study of the characteristics of white noise using the empirical mode decomposition method. Proceedings of The Royal Society A:Mathematical, and Engineering Sciences, 2004, 460(2046):1597-1611 doi: 10.1098/rspa.2003.1221 -

 下载:
下载:




图(13)
计量
- 文章访问数: 2598
- HTML全文浏览量: 576
- PDF下载量: 1023
- 被引次数: 0
