

Event-triggered Fast Consensus Algorithm for Multi-agent Systems Under Jointly-connected Topology
-
摘要: 针对组合连通拓扑下多智能体系统控制过程中存在通信和计算资源损耗大以及系统收敛速度慢等问题,提出一种新的具有状态预测器的事件触发一致性控制协议,通过设计状态预测器使每个智能体都能对其邻居智能体的未来状态作出预测;同时,对于智能个体给出了基于状态信息的事件触发条件,当状态误差满足该条件才触发事件.在该控制策略下多智能体系统可在节约通信和计算资源的同时具有更快的收敛速度.利用Lyapunov稳定性理论和代数图论,证明了所提事件触发控制策略能够有效实现组合连通拓扑结构下的平均一致性,且不存在Zeno行为.仿真实例进一步验证了理论结果的有效性.Abstract: This paper investigates the event-triggered consensus problem of multi-agent systems under jointly-connected topology. In order to reduce the unnecessary waste of limited communication and computing resources as well as improve convergence rate, a novel event-triggered consensus control law with state predictor is proposed. In particular, every agent can predict the future state of its neighbor; meanwhile, for each agent a state-dependent event condition is given, and only when state error satisfies this event condition, can the event be triggered. This control strategy can lead to a significant reduction of information communication burden in a multi-agent network and improvement of convergence rate. Based on the Lyapunov stability theorem and algebraic graph theory, the proposed event-triggered control strategy is proven to be able to implement the average consensus when the topology is jointly-connected. Moreover, such strategies can exclude Zeno-behavior. Finally, numerical simulations are given to illustrate the effectiveness of the theoretical results.
-
Key words:
- Multi-agent systems /
- event-triggered control /
- fast consensus /
- jointly-connected
1) 本文责任编委 吕金虎 -
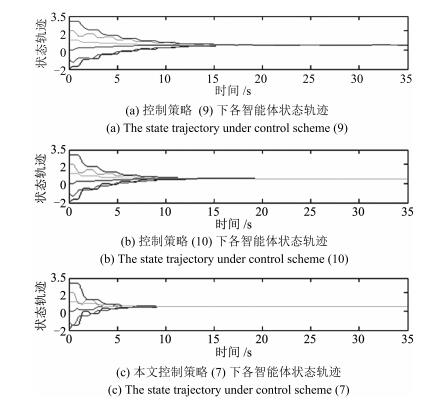
图 2 $\tau =0.5$ s时, 三种控制策略下的状态轨迹
Fig. 2 The state trajectory under three kinds of\\ control scheme when $\tau =0.5$ s
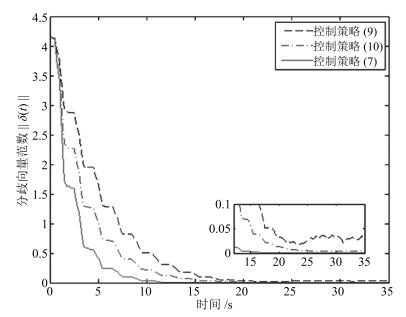
图 3 $\tau =0.5$ s时三种控制策略下的分歧向量范数$\left\| {\delta (t)} \right\|$
Fig. 3 The Euclidean norm of disagreement vector $\left\| {\delta (t)} \right\|$ under three kinds of control scheme when $\tau =0.5$ s
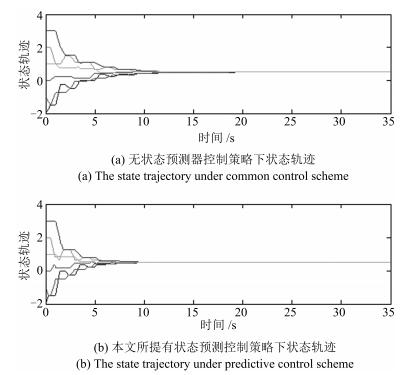
图 4 有无状态预测控制策略下状态轨迹对比图
Fig. 4 The comparison diagram between predictive control scheme and common control scheme
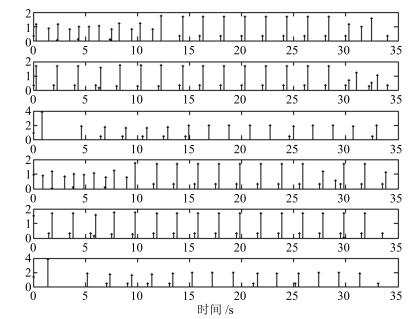
图 5 $\tau =0.5$ s每个智能体在控制策略(7)下触发间隔
Fig. 5 The triggered interval of each agent under control scheme (7)
表 1 事件条件(7), (9)和(10)下平均触发间隔
Table 1 The average triggered interval under event conditions (7), (9) and (10)
拓扑切换 事件条件(s) 周期(s) 式(7) 式(9) 式(10) 0.4 0.9563 0.6742 0.7892 0.5 1.0877 0.7209 0.9461 0.6 1.1027 0.8057 1.0673  下载: 导出CSV
下载: 导出CSV
-
[1] Clohessy W H, Wiltshire R S. Terminal guidance system for satellite rendezvous. Journal of the Aerospace Sciences, 2012, 27(9):653-658 doi: 10.2514/8.8704 [2] Horsley M, Nikolaev S, Pertica A. Small satellite rendezvous using differential lift and drag. Journal of Guidance, Control, and Dynamics, 2013, 36(2):445-453 doi: 10.2514/1.57327 [3] 罗小元, 杨帆, 李绍宝, 关新平.多智能体系统的最优持久编队生成策略.自动化学报, 2014, 40(7):1311-1319 http://www.aas.net.cn/CN/abstract/abstract18402.shtmlLuo Xiao-Yuan, Yang Fan, Li Shao-Bao, Guan Xin-Ping. Generation of optimally persistent formation for multi-agent systems. Acta Automatica Sinica, 2014, 40(7):1311-1319 http://www.aas.net.cn/CN/abstract/abstract18402.shtml [4] Lv J, Chen F, Chen G R. Nonsmooth leader-following formation control of nonidentical multi-agent systems with directed communication topologies. Automatica, 2016, 64:112-120 doi: 10.1016/j.automatica.2015.11.004 [5] Pei H Q, Chen S M, Lai Q. A local flocking algorithm of multi-agent dynamic systems. International Journal of Control, 2015, 88(11):2242-2249 doi: 10.1080/00207179.2015.1039595 [6] 陈世明, 化俞新, 祝振敏, 赖强.邻域交互结构优化的多智能体快速蜂拥控制算法.自动化学报, 2015, 41(12):2092-2099 http://www.aas.net.cn/CN/abstract/abstract18782.shtmlChen Shi-Ming, Hua Yu-Xin, Zhu Zhen-Min, Lai Qiang. Fast flocking algorithm for multi-agent systems by optimizing local interactive topology. Acta Automatica Sinica, 2015, 41(12):2092-2099 http://www.aas.net.cn/CN/abstract/abstract18782.shtml [7] Du H B, Li S H. Attitude synchronization control for a group of flexible spacecraft. Automatica, 2014, 50(2):646-651 doi: 10.1016/j.automatica.2013.11.022 [8] Weng S X, Yue D. Distributed event-triggered cooperative attitude control of multiple rigid bodies with leader-follower architecture. International Journal of Systems Science, 2016, 47(3):631-643 doi: 10.1080/00207721.2014.891777 [9] Vicsek T, Czirók A, Ben-Jacob E, Cohen I, Shochet O. Novel type of phase transition in a system of self-driven particles. Physical Review Letters, 1995, 75(6):1226-1229 doi: 10.1103/PhysRevLett.75.1226 [10] Jadbabaie A, Lin J, Morse A S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Transactions on Automatic Control, 2003, 48(6):988-1001 doi: 10.1109/TAC.2003.812781 [11] Olfati-Saber R, Murray R M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Transactions on Automatic Control, 2004, 49(9):1520-1533 doi: 10.1109/TAC.2004.834113 [12] Ren W, Beard R W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Transactions on Automatic Control, 2005, 50(5):655-661 doi: 10.1109/TAC.2005.846556 [13] Ferrari-Trecate G, Galbusera L, Marciandi M P E, Scattolini R. Model predictive control schemes for consensus in multi-agent systems with single-and double-integrator dynamics. IEEE Transactions on Automatic Control, 2009, 54(11):2560-2572 doi: 10.1109/TAC.2009.2031208 [14] 席裕庚, 黄维, 李晓丽.具有状态预测器的多智能体系统一致性研究.控制与决策, 2010, 25(5):769-772 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201005025Xi Yu-Geng, Huang Wei, Li Xiao-Li. Consensus of multi-agent system with state predictor. Control and Decision, 2010, 25(5):769-772 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201005025 [15] Wang H W, Liao X F, Huang T W. Accelerated consensus to accurate average in multi-agent networks via state prediction. Nonlinear Dynamics, 2013, 73(1-2):551-563 doi: 10.1007/s11071-013-0808-9 [16] Liu H Y, Xie G M, Wang L. Necessary and sufficient conditions for solving consensus problems of double-integrator dynamics via sampled control. International Journal of Robust and Nonlinear Control, 2010, 20(15):1706-1722 doi: 10.1002/rnc.v20:15 [17] Gao Y P, Wang L. Sampled-data based consensus of continuous-time multi-agent systems with time-varying topology. IEEE Transactions on Automatic Control, 2011, 56(5):1226-1231 doi: 10.1109/TAC.2011.2112472 [18] Dimarogonas D V, Frazzoli E, Johansson K H. Distributed event-triggered control for multi-agent systems. IEEE Transactions on Automatic Control, 2012, 57(5):1291-1297 doi: 10.1109/TAC.2011.2174666 [19] Seyboth G S, Dimarogonas D V, Johansson K H. Event-based broadcasting for multi-agent average consensus. Automatica, 2013, 49(1):245-252 doi: 10.1016/j.automatica.2012.08.042 [20] 黄红伟, 黄天民, 吴胜, 周坤.基于事件触发的二阶多智能体领导跟随一致性.控制与决策, 2016, 31(5):835-841 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201605011Huang Hong-Wei, Huang Tian-Min, Wu Sheng, Zhou Kun. Leader-following consensus of second-order multi-agent systems via event-triggered control. Control and Decision, 2016, 31(5):835-841 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201605011 [21] Liu Z, Chen Z. Reaching consensus in networks of agents via event-triggered control. Journal of Information and Computational Science, 2011, 8(3):393-402 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=90b28dfae45d30d357a5b2acfb8e84d8 [22] Xie D S, Yuan D M, Lu J W, Zhang Y J. Consensus control of second-order leader-follower multi-agent systems with event-triggered strategy. Transactions of the Institute of Measurement and Control, 2013, 35(4):426-436 doi: 10.1177/0142331212454046 [23] 杨若涵, 张皓, 严怀成.基于事件触发的拓扑切换异构多智能体协同输出调节.自动化学报, 2017, 43(3):472-477 http://www.aas.net.cn/CN/abstract/abstract19025.shtmlYang Ruo-Han, Zhang Hao, Yan Huai-Cheng. Event-triggered cooperative output regulation of heterogeneous multi-agent systems with switching topology. Acta Automatica Sinica, 2017, 43(3):472-477 http://www.aas.net.cn/CN/abstract/abstract19025.shtml [24] Seyboth G S. Event-Based Control for Multi-Agent Systems[Master thesis], KTH Electrical Engineering, Sweden, 2010. [25] Chen X, Hao F, Shao M Y. Event-triggered consensus of multi-agent systems under jointly connected topology. IMA Journal of Mathematical Control and Information, 2015, 32(3):537-556 doi: 10.1093/imamci/dnu009 [26] Godsil C, Royle G. Algebraic Graph Theory. Berlin: Springer-Verlag, 2001. 69-83 -

 下载:
下载:

计量
- 文章访问数: 2486
- HTML全文浏览量: 325
- PDF下载量: 647
- 被引次数: 0
