

-
摘要: 犯罪行为分析是侦查破案的重要参考,也是学界长期以来关注的热点.目前,犯罪行为分析主要采用现场证据-行为推断的思路,忽略了犯罪过程中犯罪主体和客体之间的复杂互动.本文在基于ACP(Artificial societies(人工社会)+Computational experiments(计算实验)+Parallel execution(平行执行))方法的犯罪现场平行系统框架下,从行为动力学角度提出了故意杀人行为的犯罪主体时间和空间互动模型,并采用真实案例数据对模型参数进行了标定.计算实验结果表明,本文提出的互动模型能较好地模拟真实数据,从而为分析犯罪过程中的复杂互动提供了一个可靠的基础.Abstract: Being important for criminal investigation, criminal behavioral analysis is always an active research topic among scholars. Current methods of criminal behavioral analysis mainly adopt the approach of evidence-behavior inference, and ignore the complex interactions between the criminal and the victim. In the framework of ACP (artificial societies + computational experiments + parallel execution)-based parallel system, this paper proposes temporal-spatial interaction models for artificial criminals from the behavioral dynamics point of view. In addition, actual intentional homicide data is used to demarcate the parameters of the models. Results of computational experiments indicate that the proposed interaction models can simulate the criminal frequencies very well according to the actual data source. Thus they provide a solid foundation for the complex interactions in criminal behavioral analysis.
-
Key words:
- Crime /
- behavior modeling of agent /
- ACP approach /
- parallel system /
- behavioral dynamics
1) 本文责任编委 张敏灵 -
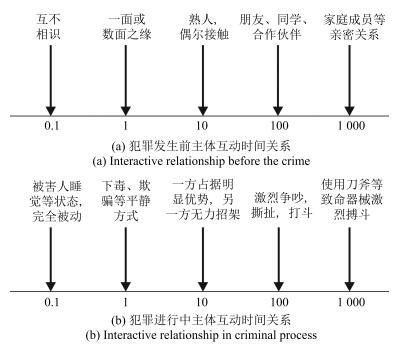
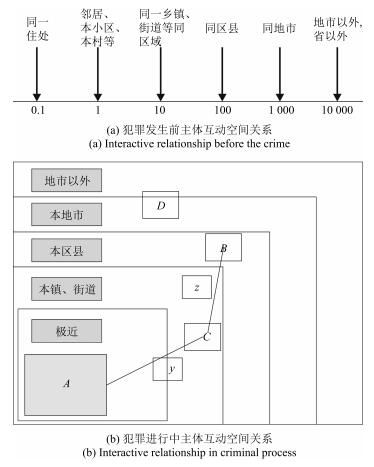
图 2 犯罪不同阶段时间互动关系简化
Fig. 2 Simplified temporal interactive relationship in different stages of crime
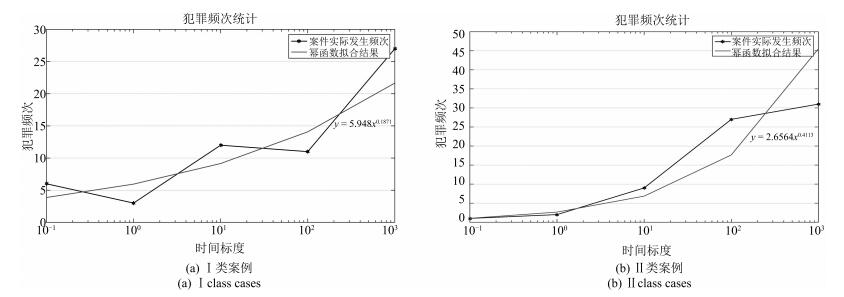
图 5 犯罪进行中双方互动时间关系:现场激烈程度分析
Fig. 5 Temporal interactive relationship in criminal process: analysis of scene fierce degree
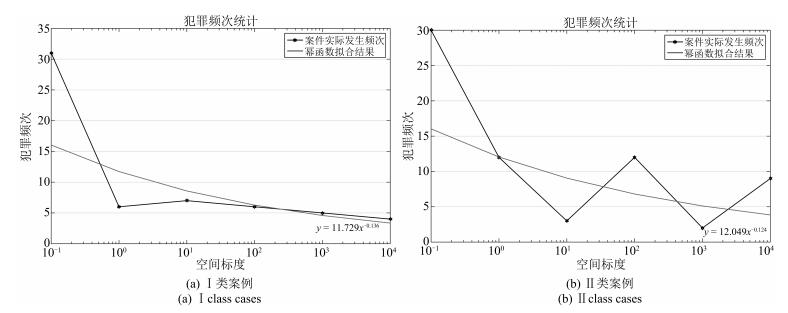
图 8 犯罪发生后犯罪人逃逸轨迹:距犯罪现场
Fig. 8 Criminal escape trajectory after the crime: distance from the crime scene
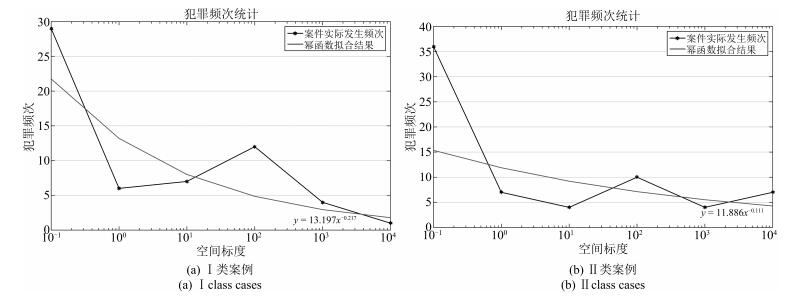
图 9 犯罪发生后犯罪人逃逸轨迹:距犯罪人住处
Fig. 9 Criminal escape trajectory after the crime: distance from the criminal residence
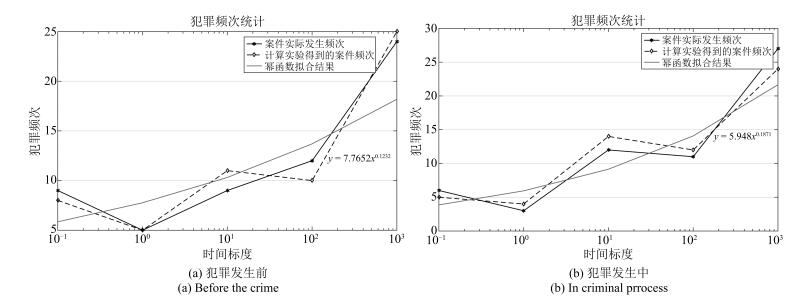
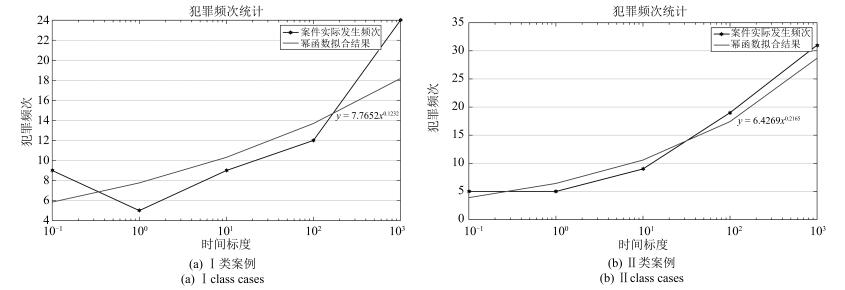
图 10 犯罪行为时间模型计算实验结果
Fig. 10 Results of computational experiment for the temporal criminal model
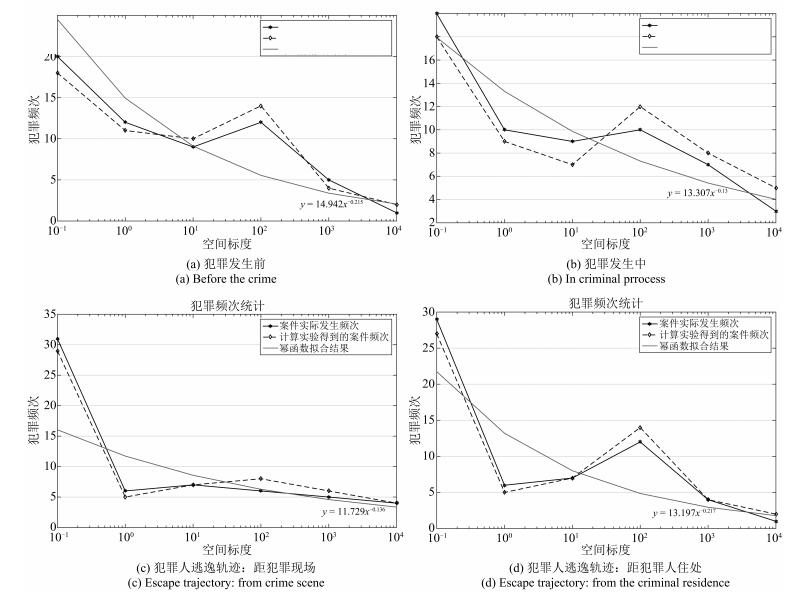
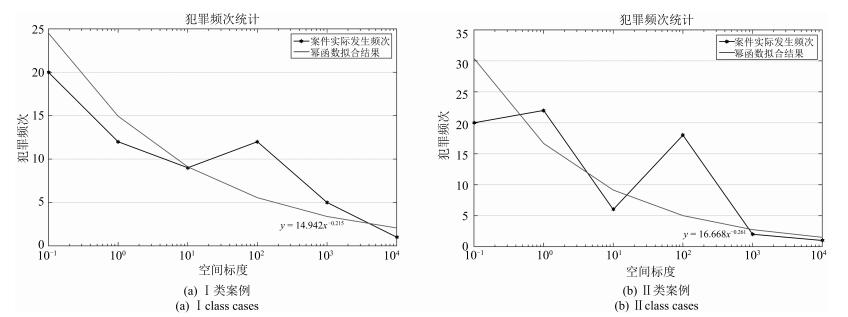
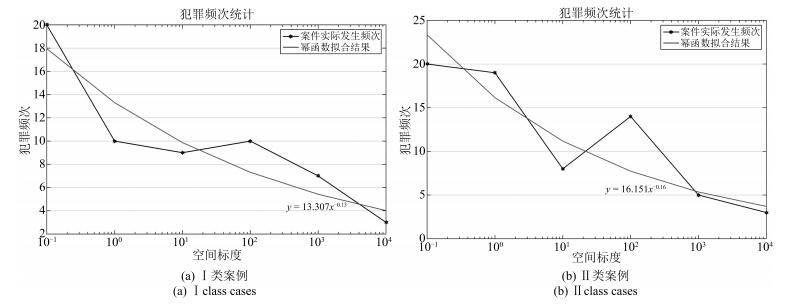
图 11 犯罪行为空间模型计算实验结果
Fig. 11 Results of computational experiment for the spatial criminal model
表 1 犯罪主体行为模型参数值
Table 1 Parameter values of criminal subject behavior model
类别 表达式 犯罪阶段 Ⅰ类案例 Ⅱ类案例 $ \alpha_{t} $或$ \alpha_{s} $ $ \beta_{t} $或$ \beta_{s} $ $ \alpha_{t} $或$ \alpha_{s} $ $ \beta_{t} $或$ \beta_{s} $ 犯罪主体行为时间模型 $ y= \alpha_{t} \times x_{t}^{ \beta_{t}}$ 犯罪发生前 7.7652 0.1232 6.4269 0.2165 犯罪进行中 5.948 0.1871 2.6564 0.4113 犯罪主体行为空间模型 $ y= \alpha_{s} \times x_{s}^{- \beta_{s}}$ 犯罪发生前 14.942 0.215 16.668 0.261 犯罪进行中 13.307 0.13 16.151 0.16 犯罪后逃逸(与犯罪现场距离) 11.729 0.136 12.049 0.124 犯罪后逃逸(与原住处距离) 13.197 0.217 11.886 0.111  下载: 导出CSV
下载: 导出CSV
-
[1] Douglas J E, Ressler R K, Burgess A W, Hartman C R. Criminal profiling from crime scene analysis. Behavioral Sciences and the Law, 1986, 4 (4):401-421 doi: 10.1002/(ISSN)1099-0798 [2] Canter D. Offender profiling and investigative psychology. Journal of Investigative Psychology and Offender Profiling, 2004, 1 (1):1-15 doi: 10.1002/(ISSN)1544-4767 [3] Chisum W, Turvey B. Evidence dynamics:locard's exchange principle and crime reconstruction. Journal of Behavioral Profiling, 2000, 1 (1):1-15 http://citeseerx.ist.psu.edu/showciting?cid=1452058 [4] Baumgartner K, Ferrari S, Palermo G. Constructing Bayesian networks for criminal profiling from limited data. Knowledge-Based Systems, 2008, 21 (7):563-572 doi: 10.1016/j.knosys.2008.03.019 [5] Bitzer S, Ribaux O, Albertini N, Delémont O. To analyse a trace or not? evaluating the decision-making process in the criminal investigation. Forensic Science International, 2016, 262:1-10 doi: 10.1016/j.forsciint.2016.02.022 [6] 刘烁, 王帅, 傅焕章, 王飞跃.软件定义的犯罪现场分析过程及其知识自动化方案.模式识别与人工智能, 2016, 29 (10):876-883 http://www.analog.com/cn/applications/markets/process-control-and-industrial-automation.htmlLiu Shuo, Wang Shuai, Fu Huan-Zhang, Wang Fei-Yue. Software-defined crime scene analysis process and its knowledge automation scheme. Pattern Recognition and Artificial Intelligence, 2016, 29 (10):876-883 http://www.analog.com/cn/applications/markets/process-control-and-industrial-automation.html [7] 钟武魁, 周旭科.杀人案中犯罪嫌疑人处理现场行为分析.刑事技术, 2015, 40 (6):474-476Zhong Wu-Kui, Zhou Xu-Ke. An investigation into suspect's behavior of staging homicidal crime scenes. Forensic Science and Technology, 2015, 40 (6):474-476 [8] van den Eeden Claire A J, de Poot C J, van Koppen P J. Forensic expectations:investigating a crime scene with prior information. Science and Justice, 2016, 56 (6):475-481 doi: 10.1016/j.scijus.2016.08.003 [9] 王珏, 姚佳, 刘刚强.新形势下加强现场勘查工作的几点思考.辽宁警察学院学报, 2016, 18 (5):30-34 http://www.qikan.com.cn/article/qiwh20171037.htmlWang Jue, Yao Jia, Liu Gang-Qiang. Reflections on strengthening crime scenes investigation under the new situation. Journal of Liaoning Police College, 2016, 18 (5):30-34 http://www.qikan.com.cn/article/qiwh20171037.html [10] 王飞跃.人工社会, 计算实验, 平行系统-关于复杂社会经济系统计算研究的讨论.复杂系统与复杂性科学, 2004, 1(4):25-35 http://mall.cnki.net/magazine/Article/FZXT200404001.htmWang Fei-Yue. Artificial societies, computational experiments, and parallel systems:a discussion on computational theory of complex social-economic systems. Complex Systems and Complexity Science, 2004, 1 (4):25-35 http://mall.cnki.net/magazine/Article/FZXT200404001.htm [11] Wang F Y, Wong P K. Intelligent systems and technology for integrative and predictive medicine:an ACP approach. ACM Transactions on Intelligent Systems and Technology, 2013, 4 (2):Article No.32 [12] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41 (1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtmlWang Fei-Yue. Software-defined systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41 (1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtml [13] Wang F Y, Wang X, Li L X, Li L. Steps toward parallel intelligence. IEEE/CAA Journal of Automatica Sinica, 2016, 3 (4):345-348 doi: 10.1109/JAS.2016.7510067 [14] Wang F Y, Zhang J, Wei Q L, Zheng X H, Li L. PDP:parallel dynamic programming. IEEE/CAA Journal of Automatica Sinica, 2017, 4 (1):1-5 doi: 10.1109/JAS.2017.7510310 [15] 王飞跃.平行控制:数据驱动的计算控制方法.自动化学报, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtmlWang Fei-Yue. Parallel control:a method for data-driven and computational control. Acta Automatica Sinica, 2013, 39 (4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtml [16] 鲍媛媛. 人类行为动力学的实证及生成机制研究[博士学位论文], 北京邮电大学, 中国, 2012Bao Yuan-Yuan. Research on Empirical Study and Mechanisms of Human Dynamics[Ph. D. dissertation], Beijing University of Posts and Telecommunications, China, 2012 [17] Barabási A L. The origin of bursts and heavy tails in human dynamics. Nature, 2005, 435 (7039):207-211 doi: 10.1038/nature03459 [18] Zhou T, Kiet H A T, Kim B J, Wang B H, Holme P. Role of activity in human dynamics. Europhysics Letters, 2008, 82 (2):28002, DOI: 10.1209/0295-5075/82/28002 [19] 赵金楼, 成俊会, 刘家国.兴趣, 习惯, 交互三重驱动的微博用户动力学模型.哈尔滨工程大学学报, 2015, 36(9):1292-1296 https://www.cnki.com.cn/lunwen-1017167228.htmlZhao Jin-Lou, Cheng Jun-Hui, Liu Jia-Guo. Microblog users' dynamic model driven by interest, habit, and interaction. Journal of Harbin Engineering University, 2015, 36 (9):1292-1296 https://www.cnki.com.cn/lunwen-1017167228.html [20] Hong W, Han X P, Zhou T, Wang B H. Heavy-tailed statistics in short-message communication. Chinese Physics Letters, 2009, 26 (2):028902, DOI: 10.1088/0256-307X/26/2/028902 [21] Gabrielli A, Caldarelli G. Invasion percolation and critical transient in the Barabási model of human dynamics. Physical Review Letters, 2007, 98 (20):208701, DOI: 10.1103/PhysRevLett.98.208701 [22] Cesar A, Hidalgo R. Conditions for the emergence of scaling in the inter-event time of uncorrelated and seasonal systems. Physica A Statistical Mechanics and Its Applications, 2006, 369 (2):877-883 doi: 10.1016/j.physa.2005.12.035 [23] Dean Malmgren R, Stouffer D B, Motter A E, Amaral L A. A poissonian explanation for heavy tails in e-mail communication. Proceedings of the National Academy of Sciences of the United States of America, 2008, 105 (47):18153-18158 doi: 10.1073/pnas.0800332105 [24] 樊超, 郭进利, 韩筱璞, 汪秉宏.人类行为动力学研究综述.复杂系统与复杂性科学, 2011, 8 (2):1-17 http://www.docin.com/p-1276732280.htmlFan Chao, Guo Jin-Li, Han Xiao-Pu, Wang Bing-Hong. A review of research on human dynamics. Complex System and Complexity Science, 2011, 8 (2):1-17 http://www.docin.com/p-1276732280.html [25] Miritello G, Moro E, Lara R. Dynamical strength of social ties in information spreading. Physical Review E Statistical Nonlinear and Soft Matter Physics, 2011, 83 (4 Pt 2):045102, DOI: 10.1103/PhysRevE.83.045102 [26] Vázquez A, Oliveira J G, Dezsö Z, Goh K I, Kondor I, Barabási A L. Modeling bursts and heavy-tails in human dynamics. Physical Review E-Statistical, Nonlinear, and Soft Matter Physics, 2006, 73 (3):80-98 http://adsabs.harvard.edu/abs/2006PhRvE..73c6127V [27] González M C, Hidalgo C A, Barabási A L. Understanding individual human mobility patterns. Nature, 2008, 453 (7196):779-782 doi: 10.1038/nature06958 [28] Ramos-fernández G, Mateos J L, Miramontes O, Cocho G, Larralde H, Ayalaorozco B. Lévy walk patterns in the foraging movements of spider monkeys. Behavioral Ecology and Sociobiology, 2003, 55 (3):223-230 https://www.researchgate.net/publication/2168422_Levy_Walk_Patterns_in_the_Foraging_Movements_of_Spider_Monkeys_Ateles_geoffroyi [29] 李亚可.论犯罪现场勘查中的信息管理.湖南警察学院学报, 2015, 27(5):59-64Li Ya-Ke. The management of information in the crime scene investigation. Journal of Hunan Police Academy, 2015, 27 (5):59-64 [30] 赵阳, 傅晓海. 3S技术在现代刑事侦查工作中的应用.中国公共安全(学术版), 2016, (4):126-130 http://edu.wanfangdata.com.cn/Periodical/Detail/fzbl201613082Zhao Yang, Fu Xiao-Hai. Application of 3S technology in the work of criminal investigation. China Public Security (Academy Edition), 2016, (4):126-130 http://edu.wanfangdata.com.cn/Periodical/Detail/fzbl201613082 [31] Li Z, Liu J, Tang J, Lu H H. Robust structured subspace learning for data representation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37 (10):2085-2098 doi: 10.1109/TPAMI.2015.2400461 [32] 白天翔, 王帅, 沈震, 曹东璞, 郑南宁, 王飞跃.平行机器人与平行无人系统:框架, 结构, 过程, 平台及其应用.自动化学报, 2017, 43 (2):161-175 http://www.aas.net.cn/CN/abstract/abstract17915.shtmlBai Tian-Xiang, Wang Shuai, Shen Zhen, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel robotics and parallel unmanned systems:framework, structure, process, platform and applications. Acta Automatica Sinica, 2017, 43 (2):161-175 http://www.aas.net.cn/CN/abstract/abstract17915.shtml [33] 戎静. 犯罪被害人的被害性分析-以被害人与犯罪人的相互作用为视角[硕士学位论文], 吉林大学, 中国, 2007Rong Jing. On Victimity of Victim-to Take Interaction of Criminal and Victim as Visual Angle[Master thesis], Jilin University, China, 2007 -

 下载:
下载:

计量
- 文章访问数: 3004
- HTML全文浏览量: 491
- PDF下载量: 713
- 被引次数: 0
