

-
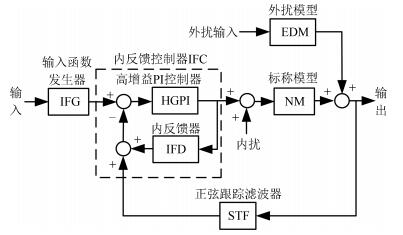
摘要: 通过一种高增益PI控制器(High gain proportion integration,HGPI)和一种内反馈器(Internal feedback device,IFD)构造出一种内反馈控制器(Internal feedback controller,IFC).文中通过HGPI进行IFD逆变换与标称模型的分析方法,分析了IFC的控制特性.IFC较好解决了一些高性能控制器的结构复杂和难以工程化等问题.IFD采用了一种不改变实际s阶次的任意阶的内反馈结构(Internal feedback structure,IFS),对于高阶对象无需降阶处理.文中还从信号处理的角度提出了一种用于IFC降阶处理的正弦跟踪滤波器(Sinusoid tracking filter,STF),具有较小的滞后特性.文中提出的内反馈控制器IFC具有简单的结构、整定参数较少、较好的鲁棒性和较强的抗扰性,并且具有良好工程应用前景.数学分析、仿真实验(包括物理实验)和实际应用的结果进一步证实了文中所提出的内反馈控制器IFC的正确性和有效性.Abstract: An internal feedback controller (IFC) is constructed by a high gain proportion integration controller (HGPI) and an internal feedback device (IFD) in this paper. By utilizing the reverse conversion of IFD and nominal model of HGPI, the control characteristics of IFC are analyzed. Problems of traditional controllers such as complicated structure and hard to implement can be solved by this IFC. In the IFD, an internal feedback structure with universal order is adopted, which does not change the actual s order. For high-order plants, the proposed controller needs no order-reduction operation. A sinusoid tracking filter (STF) is designed to handle the order-reduction of IFC from the vision of signal processing, which has a better latency feature. The proposed IFC, which has the advantages of simple structure, fewer tuning parameters, good robustness and strong anti-interference, would have a good practical application prospect. The correctness and effectiveness of the proposed IFC has been validated by theoretic analysis, simulation and physical experiments and practical application.1) 本文责任编委 谢永芳
-
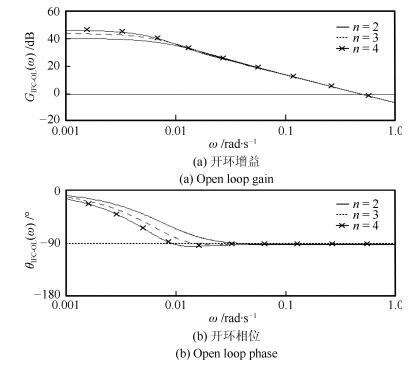
图 3 内反馈控制器开环频率特性示意图
Fig. 3 Frequency characteristic diagram of internal feedback controller of open loop
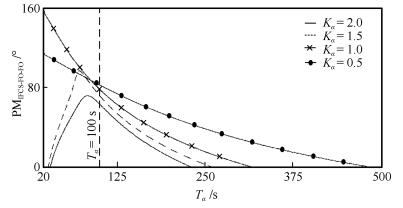
图 4 四阶内反馈控制系统频域相位稳定裕度(示意图 1)
Fig. 4 Schematic diagram of frequency domain phase stability margin of four-order of internal feedback control system (NO. 1)
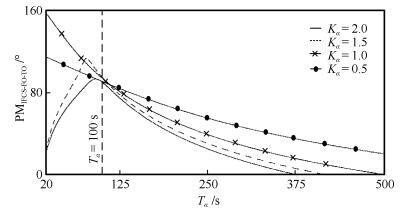
图 5 四阶内反馈控制系统频域相位稳定裕度(示意图 2)
Fig. 5 Schematic diagram of frequency domain phase stability margin of four-order of internal feedback control system (NO. 2)
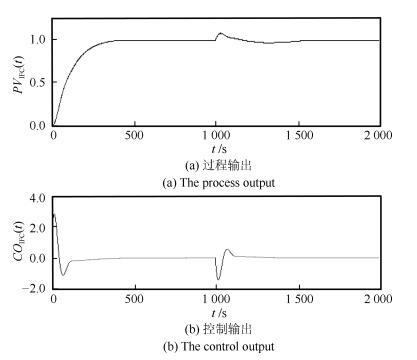
图 8 双积分对象控制特性仿真实验结果
Fig. 8 The diagram of control characteristic simulation results of two integral object
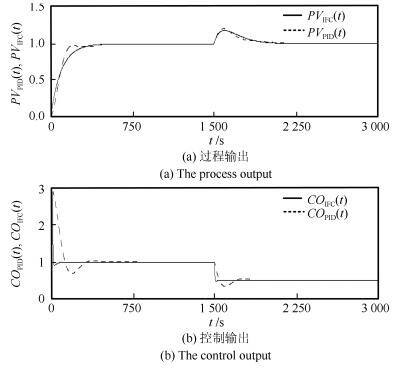
图 9 低阶惯性对象控制特性仿真实验结果(示意图 1)
Fig. 9 The diagram of control characteristic simulation results of low order inertia object (NO. 1)
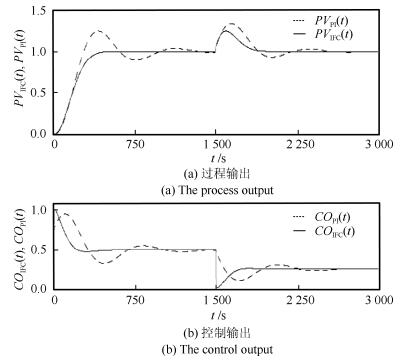
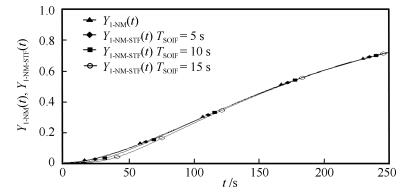
图 13 高阶惯性对象控制特性仿真实验结果(示意图 3)
Fig. 13 The diagram of control characteristic simulation results of high order inertia object (NO. 3)
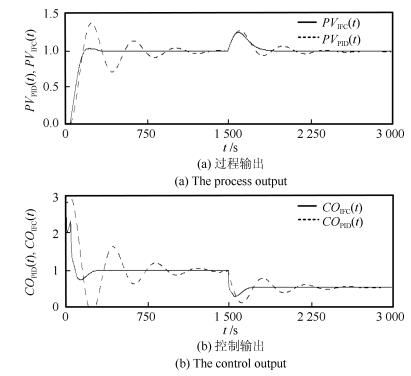
图 10 低阶惯性对象控制特性仿真实验结果(示意图 2)
Fig. 10 The diagram of control characteristic simulation results of low order inertia object (NO. 2)
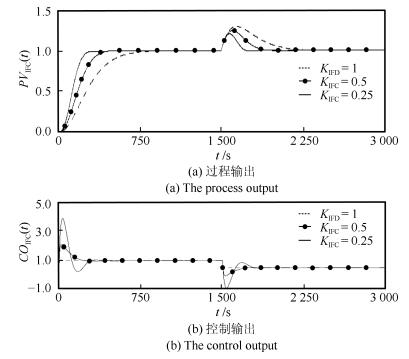
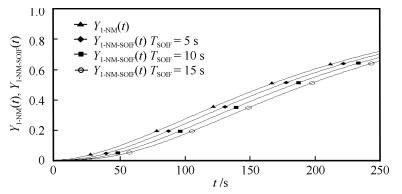
图 14 高阶惯性对象控制特性仿真实验结果(示意图 4)
Fig. 14 The diagram of control characteristic simulation results of high order inertia object (NO. 4)
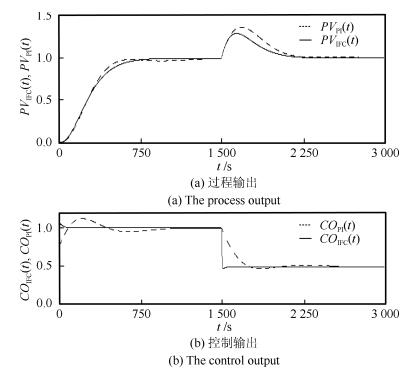
图 11 高阶惯性对象控制特性仿真实验结果(示意图 1)
Fig. 11 The diagram of control characteristic simulation results of high order inertia object (NO. 1)
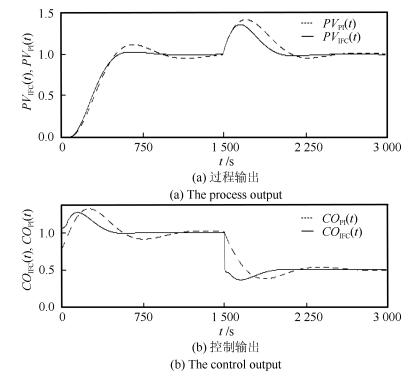
图 12 高阶惯性对象控制特性仿真实验结果(示意图 2)
Fig. 12 The diagram of control characteristic simulation results of high order inertia object (NO. 2)
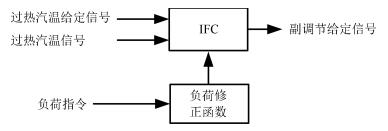
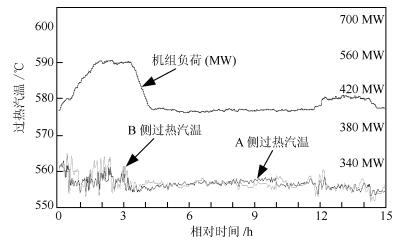
图 16 过热气温调节系统优化示意图
Fig. 16 The optimization diagram of the superheated steam temperature regulation system
-
[1] 平续斌, 丁宝苍.基于椭圆型估计误差界的动态输出反馈鲁棒模型预测控制.自动化学报, 2014, 40 (2):219-226 http://www.aas.net.cn/CN/abstract/abstract18284.shtmlPing Xu-Bin, Ding Bao-Cang. Dynamic output feedback robust model predictive control based on ellipsoidal estimation error bound. Acta Automatica Sinica, 2014, 40 (2):219-226 http://www.aas.net.cn/CN/abstract/abstract18284.shtml [2] 张维存, 刘冀伟, 胡广大.鲁棒多模型自适应控制系统的稳定性.自动化学报, 2015, 41 (1):113-121 http://www.aas.net.cn/CN/abstract/abstract18589.shtmlZhang Wei-Cun, Liu Ji-Wei, Hu Guang-Da. Stability analysis of robust multiple model adaptive control systems. Acta Automatica Sinica, 2015, 41 (1):113-121 http://www.aas.net.cn/CN/abstract/abstract18589.shtml [3] 班晓娟, 刘浩, 徐卓然.一种基于能量人工神经元模型的自生长、自组织神经网络.自动化学报, 2011, 37 (5):615-622 http://www.aas.net.cn/CN/abstract/abstract17397.shtmlBan Xiao-Juan, Liu Hao, Xu Zhuo-Ran. An energy artificial neuron model based Self-growing and Self-organizing neural network. Acta Automatica Sinica, 2011, 37 (5):615-622 http://www.aas.net.cn/CN/abstract/abstract17397.shtml [4] 李军, 万文军, 张曦.基于非线性滤波环节的新型鲁棒PID控制策略的研究.动力工程学报, 2013, 33 (2):117-122 doi: 10.3969/j.issn.1674-7607.2013.02.007Li Jun, Wan Wen-Jun, Zhang Xi. Study on novel robust PID control strategy based on Non-linear filtering. Journal of Chinese Society of Power Engineering, 2013, 33 (2):117-122 doi: 10.3969/j.issn.1674-7607.2013.02.007 [5] 史敬灼, 刘玉.超声电机简单专家PID速度控制.中国电机工程学报, 2013, 33 (36):120-125 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201336035Shi Jing-Zhuo, Liu Yu. Simple expert PID speed control of ultrasonic motors. Proceedings of the CSEE, 2013, 33 (36):120-125 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201336035 [6] 高志强.自抗扰控制思想探究.控制理论与应用, 2013, 30 (12):1498-1510 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201312006Gao Zhi-Qiang. On the foundation of active disturbance rejection control. Control Theory & Applications, 2013, 30 (12):1498-1510 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201312006 [7] 梁伟平, 王佳荣.主汽温系统混合H2/H∞最优PID控制.系统仿真学报, 2016, 28 (3):661-667Liang Wei-Ping, Wang Jia-Rong. Mixed H2/H∞ optimal PID control for superheated steam temperature system. Journal of System Simulation, 2016, 28 (3):661-667 [8] 章萌, 李爱军, 刘世民.弹性飞机的混合H2/H∞最优PID控制器参数优化.振动与冲击, 2011, 30 (10):197-202 doi: 10.3969/j.issn.1000-3835.2011.10.038Zhang Meng, Li Ai-Jun, Liu Shi-Min. Parametric optimization for mixed H2/H∞ optimal PID Controller of a flexible aircraft. Journal of Vibration and Shock, 2011, 30 (10):197-202 doi: 10.3969/j.issn.1000-3835.2011.10.038 [9] 马红波, 冯全源. BUCK型开关变换器最优PID控制器设计.电机与控制学报, 2008, 12 (6):639-643 doi: 10.3969/j.issn.1007-449X.2008.06.005Ma Hong-Bo, Feng Quan-Yuan. Optimized PID controller design for buck DC-DC switching converters. Electric Machines and Control, 2008, 12 (6):639-643 doi: 10.3969/j.issn.1007-449X.2008.06.005 [10] 穆子龙, 李洪兵, 李志勇.基于PID控制和改进粒子群优化算法的特高压直流附加次同步振荡阻尼控制器设计.中国电机工程学报, 2014, 34 (S1):93-99 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb2014z1013Mu Zi-Long, Li Hong-Bing, Li Zhi-Yong. Design of UHVDC Supplementary subsynchronous damping controller based on PID control and improved particle swarm optimization algorithm. Proceedings of the CSEE, 2014, 34 (S1):93-99 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb2014z1013 [11] 张冬丽, 唐英干, 关新平.用改进的人工蜂群算法设计AVR系统最优分数阶PID控制器.自动化学报, 2014, 40 (5):973-979 http://www.aas.net.cn/CN/abstract/abstract18365.shtmlZhang Dong-Li, Tang Ying-Gan, Guan Xin-Ping. Optimum design of fractional order PID controller for an AVR system using an improved artificial bee colony algorithm. Acta Automatica Sinica, 2014, 40 (5):973-979 http://www.aas.net.cn/CN/abstract/abstract18365.shtml [12] 吴学红, 陶文铨, 吕彦力, 龚毅.不可压缩流动问题快速计算的降阶模型.中国电机工程学报, 2010, 30 (26):69-74 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201002225405Wu Xue-Hong, Tao Wen-Quan, Lü Yan-Li, Gong Yi. Reduced order model for fast computation of incompressible fluid flow problem. Proceedings of the CSEE, 2010, 30 (26):69-74 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201002225405 [13] 尤明, 宗群, 曾凡琳, 陶阳, 徐锐.基于平衡截断方法的高超声速飞行器模型降阶.控制理论与应用, 2014, 31(6):795-800 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201406016You Ming, Zong Qun, Zeng Fan-Lin, Tao Yang, Xu Rui. Model order reduction for hypersonic vehicle based on balanced truncate method. Control Theory & Applications, 2014, 31 (6):795-800 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201406016 [14] 余祎, 谢永芳, 桂卫华, 蒋朝辉.基于谱离散方法的时滞系统PID参数整定.控制工程, 2014, 21 (1):27-31 doi: 10.3969/j.issn.1671-7848.2014.01.007Yu Yi, Xie Yong-Fang, Gui Wei-Hua, Jiang Zhao-Hui. PID tuning of time delay system based on spectral discretization methods. Control Engineering of China, 2014, 21 (1):27-31 doi: 10.3969/j.issn.1671-7848.2014.01.007 [15] 刘加存, 梅其祥, 李春辉.基于频分神经网络和预测控制的PID参数整定研究.系统仿真学报, 2014, 26 (5):1176-1179 http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201405036Liu Jia-cun, Mei Qi-xiang, Li Chun-Hui. Research of PID tuning based on Frequency & Divide neural network and model predictive control. Journal of System Simulation, 2014, 26 (5):1176-1179 http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201405036 [16] 韩京清.自抗扰控制技术:估计补偿不确定因素的控制技术.北京:国防工业出版社, 2008.Han Jing-Qing. Active Disturbance Rejection Control:the Technique for Estimating and Compensating the Uncertain-Ties. Beijing:National Defence Industry Press, 2008. [17] Gao Z Q. Scaling and bandwidth-parameterization based controller-tuning. In: Proceedings of the 2003 American Control Conference. Denver, CO, USA, USA: IEEE, 2003: 4989-4996 [18] 李杰, 齐晓慧, 夏元清, 高志强.线性/非线性自抗扰切换控制方法研究.自动化学报, 2016, 42 (2):202-212 http://www.aas.net.cn/CN/abstract/abstract18810.shtmlLi Jie, Qi Xiao-Hui, Xia Yuan-Qing, Gao Zhi-Qiang. On linear/nonlinear active disturbance rejection switching control. Acta Automatica Sinica, 2016, 42 (2):202-212 http://www.aas.net.cn/CN/abstract/abstract18810.shtml [19] Jiang T T, Huang C D, Guo L. Control of uncertain nonlinear systems based on observers and estimators. Automatica, 2015, 59:35-47 doi: 10.1016/j.automatica.2015.06.012 [20] Ran M P, Wang Q, Dong C Y. Stabilization of a class of nonlinear systems with actuator saturation via active disturbance rejection control. Automatica, 2016, 63:302-310 doi: 10.1016/j.automatica.2015.10.010 [21] 李军, 万文军, 王越超.一种新型线性二阶滤波器的研究与应用.控制理论与应用, 2017, 34 (3):312-320 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201703004Li Jun, Wan Wen-Jun, Wang Yue-Chao. Research and application of a new type of linear second-order filter. Control Theory & Applications, 2017, 34 (3):312-320 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201703004 [22] 姜柯, 陆妩, 马武英, 郭旗, 何承发, 王信, 曾俊哲, 刘默涵.质子辐射环境下PNP输入双极运算放大器辐照效应与退火特性.原子能科学技术, 2015, 49 (11):2087-2092 doi: 10.7538/yzk.2015.49.11.2087Jiang Ke, Lu Wu, Ma Wu-Ying, Guo Qi, He Cheng-Fa, Wang Xin, Zeng Jun-Zhe, Liu Mo-Han. Irradiation effect and annealing character of PNP input bipolar operational amplifier in proton radiation environment. Atomic Energy Science and Technology, 2015, 49 (11):2087-2092 doi: 10.7538/yzk.2015.49.11.2087 [23] 庞佑兵, 庞殊杨, 杨帆, 陈永任, 杨超, 陈印.一种新型真对数放大器的研究.微电子学, 2016, 46 (2):190-193 http://d.old.wanfangdata.com.cn/Periodical/wdzx201602011Pang You-Bing, Pang Shu-Yang, Yang Fan, Chen Yong-Ren, Yang Chao, Chen Yin. Study on a novel true logarithmic amplifier. Microelectronics, 2016, 46 (2):190-193 http://d.old.wanfangdata.com.cn/Periodical/wdzx201602011 [24] 杨光达, 周游.非线性跟踪微分器稳态性能分析及仿真研究.光电技术应用, 2010, 25 (5):80-82 doi: 10.3969/j.issn.1673-1255.2010.05.022Yang Guang-Da, Zhou You. Analysis and simulation of steady-state performance in nonlinear tracking-differentiator. Electro-Optic Technology Application, 2010, 25 (5):80-82 doi: 10.3969/j.issn.1673-1255.2010.05.022 [25] 李军, 万文军, 胡康涛.一种基于点频滤波器的微分信号提取方法.自动化学报, 2017, 43 (3):478-486 http://www.aas.net.cn/CN/abstract/abstract19026.shtmlLi Jun, Wan Wen-Jun, Hu Kang-Tao. A new method for extraction of process differential signal based on single-frequency-pass filter. Acta Automatica Sinica, 2017, 43 (3):478-486 http://www.aas.net.cn/CN/abstract/abstract19026.shtml [26] 李军, 万文军.一种基于序列零初相位调制的新型正弦信号频率测量方法.自动化学报, 2016, 42 (10):1585-1594 http://www.aas.net.cn/CN/abstract/abstract18945.shtmlLi Jun, Wan Wen-Jun. A novel sinusoidal frequency measurement method based on modulation of sequence with zero initial phase. Acta Automatica Sinica, 2016, 42 (10):1585-1594 http://www.aas.net.cn/CN/abstract/abstract18945.shtml -

 下载:
下载:

计量
- 文章访问数: 2767
- HTML全文浏览量: 336
- PDF下载量: 718
- 被引次数: 0
