

Quantitative Reconfigurability Evaluation for Control Systems in View of Time Properties
-
摘要: 故障诊断时间和控制重构延时严重影响了控制系统的实际重构性能,然而目前缺乏相关研究.基于该现状,本文针对执行器快变偏差故障,重点考虑时间特性影响,结合能量与输入约束,对控制系统可重构性的定量评价问题展开了研究.首先,以基于观测器的故障诊断算法和控制重构方案为例,建立了重构系统模型;然后,以该模型为对象,通过对重构过程中关键时刻的分析,深入研究了系统故障后的动态特性,并综合考虑故障引起的状态偏差、资源浪费以及诊断误差,设计了用于描述故障系统性能下降程度的二次型性能指标;其次,利用Lyapunov稳定性理论,定量求解了性能指标关于时间的一般表达式,进而求得该指标在整个时域中的最优解;最后,基于最优性能指标,引入了可重构度的概念,实现了对控制系统可重构性的理论判定以及定量描述,并通过数值仿真验证了所提可重构性分析方法的有效性.Abstract: Due to the effect on actual reconfigurability of control systems caused by delays of fault diagnosis and controller reconfiguration, it is necessary to analyze system reconfigurability in the time domain. Given this, a quantitative analysis on time properties of reconfigurability is carried out for control systems with fast time-varying actuator bias fault in this paper. First of all, the observer-based fault diagnotor and reconfigurable controller are presented as an example to build the reconfigured system model. Then, the key instants for the whole fault-tolerant process are analyzed to describe the system post-fault properties and a quadratic index is designed to describe the performance degradation related to the nominal system. Next, the analytical expression of the quadratic index is deduced in terms of Lyapunov stability theory, based on which time management is optimized for the reconfiguration scheme. After that, the reconfigurability of the control system is quantitatively evaluated by giving the reconfigurability criteria and introducing the degree of reconfigurability. Finally, a numerical simulation is carried out to show the validity of the proposed analysis method.1) 本文责任编委 姜斌
-
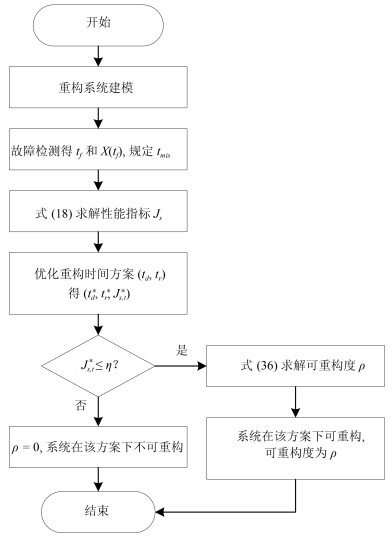
图 2 控制系统可重构性评价流程
Fig. 2 Flowchart of the quantitative reconfigurability evaluation for control systems
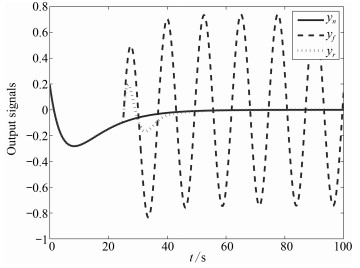
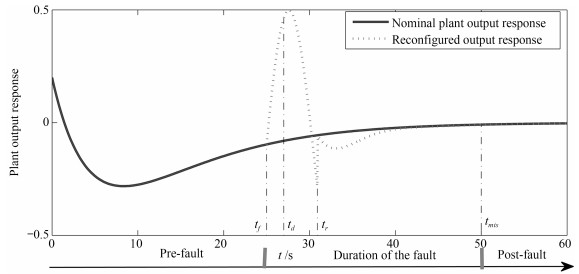
图 3 标称、故障与重构系统的输出响应
Fig. 3 Output discrepancies of nominal, fault and reconfigurated systems

图 4 ${t_d} = 34$s时, 性能指标${J_s}$随${t_r}$的变化曲线
Fig. 4 Cost index evolution for different ${t_r}$ (${t_d} = 34$s)
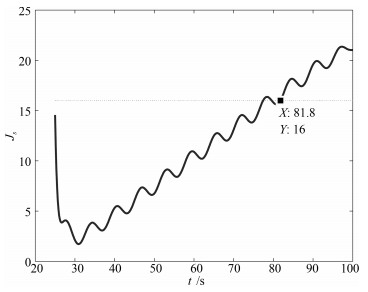
图 5 ${t_d} = {t_r}$时, 性能指标${J_s}$随${t_d}$的变化曲线
Fig. 5 Cost index evolution for different ${t_d}$ (${t_d} = {t_r}$)
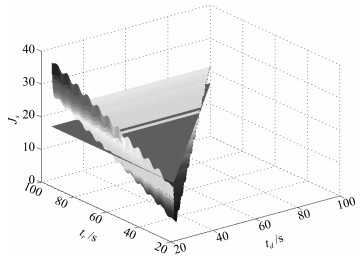
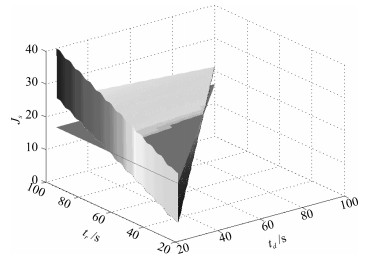
图 6 性能指标${J_s}$关于不同${t_d}, {t_r}$的变化曲线
Fig. 6 Cost index evolution for different ${t_d}, {t_r}$
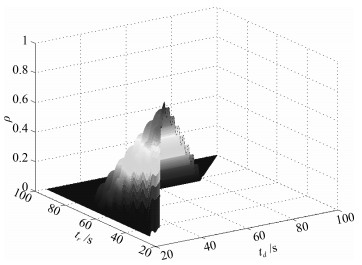
图 7 可重构性指标$\rho $关于不同${t_d}, {t_r}$的变化曲线
Fig. 7 Degree of reconfigurability for different ${t_d}, {t_r}$

图 8 ${t_{r1}}$与$t_r^*$两个不同重构时刻的系统输出响应
Fig. 8 Output discrepancies for two instants ${t_{r1}}, t_r^*$

图 9 ${t_{r1}}$与$t_r^*$两个不同重构时刻的系统输入响应
Fig. 9 Input discrepancies for two instants ${t_{r1}}, t_r^*$
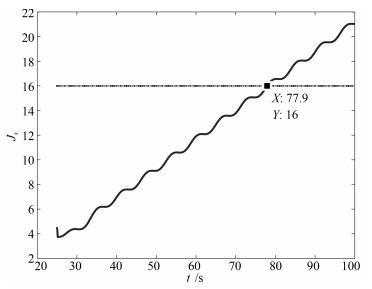
图 10 ILO系统${t_d} = {t_r}$时, 性能指标${J_s}$随${t_d}$的变化曲线
Fig. 10 Cost index evolution for different ${t_d}$ (${t_d} = {t_r}$, ILO)
-
[1] Gao Z W, Ding S X, Cecati C. Real-time fault diagnosis and fault-tolerant control. IEEE Transactions on Industrial Electronics, 2015, 62(6):3752-3756 doi: 10.1109/TIE.2015.2417511 [2] 李文博, 王大轶, 刘成瑞.动态系统实际故障可诊断性的量化评价研究.自动化学报, 2015, 41(3):497-507 http://www.aas.net.cn/CN/abstract/abstract18628.shtmlLi Wen-Bo, Wang Da-Yi, Liu Cheng-Rui. Quantitative evaluation of actual fault diagnosability for dynamic systems. Acta Automatica Sinica, 2015, 41(3):497-507 http://www.aas.net.cn/CN/abstract/abstract18628.shtml [3] 段文杰, 王大轶, 刘成瑞.卫星控制系统离散积分滑模容错控制.控制理论与应用, 2015, 32(2):133-141 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzllyyy201502001Duan Wen-Jie, Wang Da-Yi, Liu Cheng-Rui. Discrete-time integral sliding-mode fault-tolerant controller for satellite control system. Control Theory & Applications, 2015, 32(2):133-141 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzllyyy201502001 [4] Wu N E, Zhou K M, Salomon G. Control reconfigurability of linear time-invariant systems. Automatica, 2000, 36(11):1767-1771 doi: 10.1016/S0005-1098(00)00080-7 [5] 关守平, 杨飞生.面向重构目标的控制系统可重构性.信息与控制, 2010, 39(4):391-396 http://www.oalib.com/paper/4719569Guan Shou-Ping, Yang Fei-Sheng. Reconfiguration-goal-oriented control system reconfigurability. Information and Control, 2010, 39(4):391-396 http://www.oalib.com/paper/4719569 [6] Staroswiecki M. On reconfigurability with respect to actuator failures. In:Proceedings of the 15th Triennial World Congress of the International Federation of Automatic Control. Barcelona, Spanish:IFAC, 2002. 775-780 [7] Du G X, Quan Q, Yang B X, Cai K Y. Controllability analysis for multirotor helicopter rotor degradation and failure. Journal of Guidance, Control, and Dynamics, 2015, 38(5):978-985 doi: 10.2514/1.G000731 [8] Khelassi A, Theilliol D, Weber P. Reconfigurability analysis for reliable fault-tolerant control design. International Journal of Applied Mathematics and Computer Science, 2011, 21(3):431-439 doi: 10.2478/v10006-011-0032-z [9] Wu N E, Busch T. Operational reconfigurability in command and control. In:Proceedings of the 2004 American Control Conference. Boston, USA:IEEE, 2004. 4426-4431 [10] Gehin A L, Staroswiecki M. Reconfiguration analysis using generic component models. IEEE Transactions on Systems, Man, and Cybernetics-Part A:Systems and Humans, 2008, 38(3):575-583 doi: 10.1109/TSMCA.2008.918608 [11] 段文杰, 王大轶, 刘成瑞.一种线性系统可重构控制分析方法.自动化学报, 2014, 40(12):2726-2736 http://www.aas.net.cn/CN/abstract/abstract18552.shtmlDuan Wen-Jie, Wang Da-Yi, Liu Cheng-Rui. An analysis method for reconfigurable control of linear systems. Acta Automatica Sinica, 2014, 40(12):2726-2736 http://www.aas.net.cn/CN/abstract/abstract18552.shtml [12] 项昌毅, 杨浩, 程月华, 姜斌, 刘成瑞.卫星姿态控制系统的可重构性指标分配.航天控制, 2014, 32(2):46-52, 59 http://mall.cnki.net/magazine/Article/HTKZ201402009.htmXiang Chang-Yi, Yang Hao, Cheng Yue-Hua, Jiang Bin, Liu Cheng-Rui. Reconfigurable allocation of satellite attitude control system. Aerospace Control, 2014, 32(2):46-52, 59 http://mall.cnki.net/magazine/Article/HTKZ201402009.htm [13] Staroswiecki M, Cazaurang F. Fault recovery by nominal trajectory tracking. In:Proceedings of the 2008 American Control Conference. Seattle, Washington, USA:IEEE, 2008. 1070-1075 [14] Zhang Y M, Jiang J. Issues on integration of fault diagnosis and reconfigurable control in active fault-tolerant control systems. IFAC Proceedings Volumes, 2006, 39(13):1437-1448 doi: 10.3182/20060829-4-CN-2909.00240 [15] Hamdaoui R, Abdelkrim M N. Conditions on diagnosis and accommodation delays for actuator fault recoverability. In:Proceedings of the 8th International Multi-Conference on Systems, Signals and Devices. Sousse, Tunisia:IEEE, 2011. 1-6 [16] Joshi S M, González O R, Upchurch J M. Identifiability of additive actuator and sensor faults by state augmentation. Journal of Guidance, Control, and Dynamics, 2014, 37(3):941-946 doi: 10.2514/1.62523 [17] Upchurch J M, González O R, Joshi S M. Identifiability of additive, time-varying actuator and sensor faults by state augmentation, Technical Report NASA/TM-2014-218669, NASA Langley Research Center, Hampton, VA, USA, 2014. [18] Hamdaoui R, Guesmi S, El Harabi R. UIO based robust fault detection and estimation. In:Proceedings of the 2013 International Conference on Control, Decision and Information Technologies. Hammamet, Tunisia:IEEE, 2013. 76-81 [19] 胡志坤, 孙岩, 姜斌, 何静, 张昌凡.一种基于最优未知输入观测器的故障诊断方法.自动化学报, 2013, 39(8):1225-1230 http://www.aas.net.cn/CN/abstract/abstract18153.shtmlHu Zhi-Kun, Sun Yan, Jiang Bin, He Jing, Zhang Chang-Fan. An optimal unknown input observer based fault diagnosis method. Acta Automatica Sinica, 2013, 39(8):1225-1230 http://www.aas.net.cn/CN/abstract/abstract18153.shtml [20] Jiang B, Staroswiecki M. Adaptive observer design for robust fault estimation. International Journal of Systems Science, 2002, 33(9):767-775 doi: 10.1080/00207720210144776 [21] Collins E G, Song T L. Robust H∞ estimation and fault detection of uncertain dynamic systems. Journal of Guidance, Control, and Dynamics, 2000, 23(5):857-864 doi: 10.2514/2.4615 [22] Tang G Y, Li J. Optimal fault diagnosis for systems with delayed measurements. IET Control Theory & Applications, 2008, 2(11):990-998 https://www.researchgate.net/publication/224347343_Optimal_fault_diagnosis_for_systems_with_delayed_measurements [23] Chen W, Saif M. Observer-based fault diagnosis of satellite systems subject to time-varying thruster faults. Journal of Dynamic Systems, Measurement, and Control, 2007, 129(3):352-356 doi: 10.1115/1.2719773 -

 下载:
下载:

计量
- 文章访问数: 2680
- HTML全文浏览量: 303
- PDF下载量: 676
- 被引次数: 0
