

Vehicle Speed Planning and Control for Fuel Consumption Optimization with Traffic Light State
-
摘要: 基于车联网(Vehicular ad hoc networks,VANETs)进行车辆和信号灯的协同控制是下一代智能交通系统(Intelligent transportation systems,ITSs)中非常重要的核心技术之一.本文提出了一种预测信号灯信息的车辆低油耗环保驾驶控制系统.首先,根据道路信息和牛顿第二定律建立车辆动态模型,根据系统测量的信号灯状态信息,获得车辆避免刹车情况下通过前方信号灯的参考速度.然后,结合基于油耗模型和速度跟踪的综合优化指标,运用模型预测控制(Model predictive control,MPC)方法计算车辆的最优控制输入,并利用Laguerre函数方法对MPC问题进行求解.仿真表明,该系统可减少路口不必要的停车和刹车操作,节约燃油.Abstract: Vehicle and traffic timing joint control based on vehicular ad hoc networks (VANETs) is one of the most significant core technologies in the next generation intelligent transportation systems (ITSs). This paper presents an eco-driving control system aiming at minimizing fuel consumption via traffic timing prediction. First, a vehicle dynamic model is established according to the road conditions and Newton's second law. The reference velocity for the car to pass through a signal intersection ahead without stopping is calculated by predicting the traffic light state. Then, based on a comprehensive optimization index, which is a function of fuel consumption and velocity tracking error, the optimal control input is obtained in the framework of model predictive control (MPC). The solution to the MPC problem is derived using Laguerre function method. Simulation results illustrate that this method can effectively decrease the waiting times and unnecessary brake operations at intersections, and at the same time reduce the fuel consumption.
-
Key words:
- Traffic timing /
- model predictive control (MPC) /
- fuel cost /
- speed tracking
1) 本文责任编委 侯忠生 -
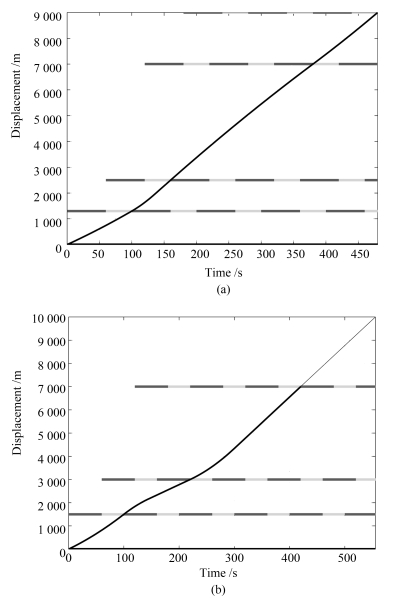
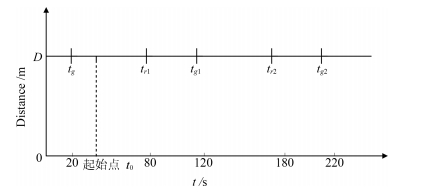
图 2 基于信号灯信息的车辆驾驶距离曲线
Fig. 2 The vehicle driving distance curve with\\ traffic light information
-
[1] 赵娜, 袁家斌, 徐晗.智能交通系统综述.计算机科学, 2014, 41(11):7-11 doi: 10.11896/j.issn.1002-137X.2014.11.002Zhao Na, Yuan Jia-Bin, Xu Han. Survey on intelligent transportation system. Computer Science, 2014, 41(11):7-11 doi: 10.11896/j.issn.1002-137X.2014.11.002 [2] 杨凯. 2014中国汽车市场回顾及2015销量预测.汽车工业研究, 2014, (4):4-11 http://www.cqvip.com/QK/97249X/201504/664344779.htmlYang Kai. China's automobile market review of 2014 and sales prediction in 2015. Auto Industry Research, 2014, (4):4-11 http://www.cqvip.com/QK/97249X/201504/664344779.html [3] Mukhtar A, Xia L K, Tang T B. Vehicle detection techniques for collision avoidance systems:a review. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5):2318-2338 doi: 10.1109/TITS.2015.2409109 [4] Xiao L Y, Gao F. A comprehensive review of the development of adaptive cruise control systems. Vehicle System Dynamics, 2010, 48(10):1167-1192 doi: 10.1080/00423110903365910 [5] Dey K C, Yan L, Wang X J, Wang Y, Shen H Y, Chowdhury M, Yu L, Qiu C X, Soundararaj V. A review of communication, driver characteristics, and controls aspects of cooperative adaptive cruise control (CACC). IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2):491-509 doi: 10.1109/TITS.2015.2483063 [6] Nkoro A B, Vershinin Y A. Current and future trends in applications of Intelligent Transport Systems on cars and infrastructure. In: Proceedings of IEEE 17th International Conference on Intelligent Transportation Systems. Qingdao, China: IEEE, 2014. 514-519 http://www.researchgate.net/publication/288485201_Current_and_future_trends_in_applications_of_Intelligent_Transport_Systems_on_cars_and_infrastructure [7] Butakov V A, Ioannou P. Personalized driver assistance for signalized intersections using V2I communication. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7):1910-1919 doi: 10.1109/TITS.2016.2515023 [8] Kamal M A S, Mukai M, Murata J, Kawabe T. Development of ecological driving system using model predictive control. In: Proceedings of the 2009 ICCAS-SICE. Fukuoka: IEEE, 2009. 3549-3554 http://ieeexplore.ieee.org/document/5335186/ [9] Kamal M A S, Mukai M, Murata J, Kawabe T. Ecological vehicle control on roads with up-down slopes. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(3):783-794 doi: 10.1109/TITS.2011.2112648 [10] Ichihara T, Kumano S, Yamaguchi D, Sato Y, Suda Y. Driver assistance system for eco-driving. In: Proceedings of 16th ITS World Congress and Exhibition on Intelligent Transport Systems and Services. Stockholm, Sweden: ITS, 2009. https://www.mendeley.com/research-papers/driver-assistance-system-ecodriving/ [11] Yang X Y, Li D, Zheng P J. Effects of eco-driving on driving performance. Applied Mechanics & Materials, 2012, 178-181:2859-2862 https://www.scientific.net/AMM.178-181.2859 [12] Asadi B, Vahidi A. Predictive cruise control:utilizing upcoming traffic signal information for improving fuel economy and reducing trip time. IEEE Transactions on Control Systems Technology, 2011, 19(3):707-714 doi: 10.1109/TCST.2010.2047860 [13] Cheng Q, Nouveliére L, Orfila O. A new eco-driving assistance system for a light vehicle: energy management and speed optimization. In: Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (Ⅳ). Gold Coast, Australia: IEEE, 2013. 1434-1439 http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=6629668 [14] Sung T W, Shiu L C, Lin F T, Yang C S. A speed control scheme of eco-driving at road intersections. In: Proceedings of the 3rd International Conference on Robot, Vision and Signal Processing. Kaohsiung, Taiwan, China: IEEE, 2015. 51-54 http://ieeexplore.ieee.org/document/7399145/ [15] Xiang X H, Zhou K, Zhang W B, Qin W H, Mao Q Z. A closed-loop speed advisory model with Driver's behavior adaptability for eco-driving. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(6):3313-3324 doi: 10.1109/TITS.2015.2443980 [16] Kamal M A S, Mukai M, Murata J, Kawabe T. Ecological driver assistance system using model-based anticipation of vehicle-road-traffic information. IET Intelligent Transport Systems, 2010, 4(4):244-251 doi: 10.1049/iet-its.2009.0127 [17] Kamal M A S, Mukai M, Murata J, Kawabe T. Model predictive control of vehicles on urban roads for improved fuel economy. IEEE Transactions on Control Systems Technology, 2013, 21(3):831-841 doi: 10.1109/TCST.2012.2198478 [18] Kamal M A S, Mukai M, Murata J, Kawabe T. Ecological driving based on preceding vehicle prediction using MPC. IFAC Proceedings Volumes, 2011, 44(1):3843-3848 doi: 10.3182/20110828-6-IT-1002.02748 [19] Azpilicueta L, Vargas-Rosales C, Falcone F. Intelligent vehicle communication:deterministic propagation prediction in transportation systems. IEEE Vehicular Technology Magazine, 2016, 11(3):29-37 doi: 10.1109/MVT.2016.2549995 [20] Nguyen V, Kim O T T, Dang T N, Moon S I, Hong C S. An efficient and reliable green light optimal speed advisory system for autonomous cars. In: Proceedings of the 18th Asia-Pacific Network Operations and Management Symposium (APNOMS). Kanazawa: IEEE, 2016. 1-4 http://ieeexplore.ieee.org/document/7737260/ [21] Zheng X Z, Zhang L G, Kholodov Y. Model predictive control of eco-driving for transit using V2I communication. In: Proceedings of the 34th Chinese Control Conference (CCC). Hangzhou, China: IEEE, 2015. 2511-2516 http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=7260026 [22] Guan T Y, Frey C W. Predictive fuel efficiency optimization using traffic light timings and fuel consumption model. In: Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC). The Hague, The Netherlands: IEEE, 2013. 1553-1558 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=6728451 [23] Wang Q, Guo G, Cai B B. Distributed receding horizon control for fuel-efficient and safe vehicle platooning. Science China Technological Sciences, 2016, 59(12):1953-1962 doi: 10.1007/s11431-016-0856-8 [24] Huang S, Ren W. Safety, comfort, and optimal tracking control in AHS applications. IEEE Control Systems, 1998, 18(4):50-64 doi: 10.1109/37.710878 [25] Seredynski M, Dorronsoro B, Khadraoui D. Comparison of green light optimal speed advisory approaches. In: Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC). The Hague, The Netherlands: IEEE, 2013. 2187-2192 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=6728552 [26] Mandava S, Boriboonsomsin K, Barth M. Arterial velocity planning based on traffic signal information under light traffic conditions. In: Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems. St. Louis, America: IEEE, 2009. 1-6 http://ieeexplore.ieee.org/document/5309519/ [27] Wang L P. Model Predictive Control System Design and Implementation Using MATLAB®, London:Springer-Berlin, 2009. 1-148 [28] Gipps P G. A behavioural car-following model for computer simulation. Transportation Research Part B:Methodological, 1981, 15(2):105-111 doi: 10.1016/0191-2615(81)90037-0 -

 下载:
下载:


图(6)
计量
- 文章访问数: 3056
- HTML全文浏览量: 512
- PDF下载量: 1153
- 被引次数: 0
