

-
摘要: 在压缩感知理论中,设计好的稀疏重构算法是一个比较重要,同时也是一个具有挑战性的问题.稀疏重构的基本目标是用较少的数据样本,通过解一个优化问题完成信号或者图像重构.关于稀疏重构过程,一个重要的研究方向是在数据受噪声干扰的情况下,如何高效快速地重建原信号.本文提出了基于共轭梯度最小二乘法(Conjugate gradient least squares,CGLS)和最小二乘QR分解(Least squares QR,LSQR)的联合优化的匹配追踪算法.该算法采用Alpha散度来测量CGLS和LSQR之间的离散度(差异度),并通过离散度来选择最优的解序列.实验分析表明基于CGLS和LSQR的联合优化的匹配追踪算法在压缩采样的信号受噪声干扰情况下具有较好的恢复能力.Abstract: For compressed sensing theory, to design a good sparse reconstruction algorithm is a challenge. The basic purpose of sparse reconstruction is to implement the signal or image reconstruction by solving optimization problem on the condition of fewer data samples. For the sparse reconstruction, an important aspect is how to reconstruct original signal when data is contaminated by noise. In this article, we present a matching pursuit algorithm, in which the conjugate gradient least squares (CGLS) method combines the least squares QR (LSQR) method to solve the optimization. This algorithm uses alpha divergence to measure dispersion between CGLS and LSQR, then selects optimization solution sequence in light of the dispersion. Experiment shows that the matching pursuit algorithm has excellent reconstruction performance when the signal of compressed sampling is contaminated.
-
Key words:
- Compressed sensing /
- matching pursuit /
- sparse reconstruction /
- noise
-
无线网络化多传感器融合估计以其一系列优点, 已经被广泛应用于控制、目标跟踪、生物监测、信号处理和通信等领域, [1-4].然而在实际应用系统中将不可避免地存在传感器故障、模型的不确定性、时间延迟和丢包问题, 使得系统融合估计性能受到严重损害.针对此类系统, 已有学者将随机系统理论、时滞系统理论和融合估计理论相结合, 提出了一些融合估计算法.文献[5]通过增广矩阵方法, 将同时存在不确定观测、随机测量时延和多丢包现象的系统转化为无时滞系统, 并利用射影理论导出最优融合估计器; 考虑到文献[5]中状态维数增加将导致计算负担加重, 文献[6]基于MMSE (Minimum mean square error)准则, 导出了传感器失效下, 既有观测时延又有状态时延的不确定系统的鲁棒Kalman滤波器.文献[7]在集中式融合框架下, 对存在传感器失效、模型不确定性、观测数据包延迟和丢失情况下的融合估计问题进行了讨论, 并提出两种不同的融合估计算法.文献[8]利用文献[9]的结论, 在未考虑模型不确定的前提下, 提出了具有传感器失效、局部最优估计传输时延和丢包下的分布式Kalman融合估计方法.
在恶劣复杂的使用环境中, 除传感器失效现象外, 还会出现因传感器老化、网络拥堵等原因导致的传感器增益退化, [10-12].相比于传感器失效, 传感器增益退化在无线网络化多传感器融合估计系统中并未得到广泛研究, 而且同时考虑传感器增益退化、模型不确定性、数据时延和丢包问题的文献极少.文献[13]在文献[14]的基础上, 给出了一种传感器增益退化下, 具有数据传输延迟和丢失的离散不确定系统的集中式融合估计器.集中式融合结构虽能保证融合估计性能最优, 但是其容错能力较差, 工程上难以实现.因此, 本文在分布式融合框架下, 研究了具有传感器增益退化、模型不确定性、数据传输延迟和丢包的多传感器融合估计问题.其中, 模型的不确定性描述为系统矩阵受到随机扰动, 传感器增益退化现象通过统计特性已知的随机变量来描述, 并由此得到传感器增益退化下的量测方程, 随机时延和丢包现象存在于局部最优状态估计向融合中心传输的过程中.首先, 基于状态方程和量测方程, 设计了一种局部最优无偏估计器, 使得局部估计误差均方差最小.然后, 将传输时延描述为随机过程, 并在融合中心端建立符合存储规则的时延, -, 丢包模型, 利用最优线性无偏估计方法, [15-18], 导出最小方差意义下的分布式融合估计器.最后, 通过算例仿真证明所设计融合估计器的有效性.
1. 问题描述与分析
考虑如下离散不确定线性时变随机系统:
$ {{{\textbf{x}}}_{k+1}}=({{A}_{k}}+{{g}_{k}}{{\hat{A}}_{k}}){{\textbf{{x}}}_{k}}+{{{\textbf{w}}}_{k}} $
(1) 其中, ${{\pmb{\textbf{x}}}_{k}}\in {{\bf R}^{n}}$ 是系统状态, ${{A}_{k}}$ 和 ${{\hat{A}}_{k}}$ 是已知矩阵, ${{\pmb{\textbf{w}}}_{k}}\in{{\bf R}^{n}}$ 是协方差矩阵为 ${{W}_{k}}$ 的零均值白噪声, ${{g}_{k}}$ 是乘性白噪声, 且已知 ${\rm E}\{{{g}_{k}}\}={{\bar{g}}_{k}}$ , ${\rm E}\{g_{k}^{2}\}={{\tilde{g}}_{k}}$ .
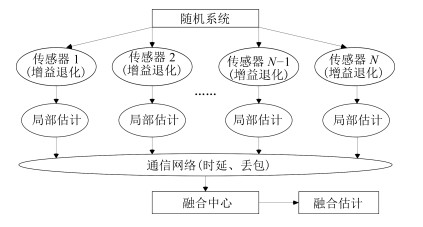
如图 1所示, 假设系统由 $N$ 个传感器进行观测, 第 $i$ 个传感器的量测方程描述为:
$ {\textbf{y}}_{k}^{i}=f_{k}^{i}C_{k}^{i}{{\pmb{\textbf{x}}}_{k}}+\pmb{\textbf{v}}_{k}^{i}, ~~i=1, 2, \cdots, N $
(2) 其中, $\pmb{\textbf{y}}_{k}^{i}\in {{\bf R}^{{{m}^{i}}}}$ 是第 $i$ 个传感器的测量输出, $C_{k}^{i}$ 是已知的量测矩阵, $\pmb{\textbf{v}}_{k}^{i}$ 是协方差矩阵为 $V_{k}^{i}$ 的零均值白噪声, 并假设 $\pmb{\textbf{v}}_{k}^{i}$ 与 ${{\pmb{\textbf{w}}}_{k}}$ 、 ${{g}_{k}}$ 均不相关. $f_{k}^{i}$ 是分布在区间 $[{{a}^{i}}, {{b}^{i}}]~(0\le{{a}^{i}}\le{{b}^{i}}\le1)$ 上的随机变量, 它用来描述传感器增益退化程度, 且已知 ${\rm E}\{f_{k}^{i}\}=\bar{f}_{k}^{i}$ , ${\rm E}\{f{{_{k}^{i}}^{2}}\}=\tilde{f}_{k}^{i}$ .
不失一般性, 对系统做如下假设:
假设1.对于任意 $i$ 和 $k$ , $f_{k}^{i}$ 、 ${{g}_{k}}$ 、 ${{\pmb{\textbf{w}}}_{k}}$ 和 $\pmb{\textbf{v}}_{k}^{i}$ 两两互不相关.
假设2.初始状态 ${{\pmb{\textbf{x}}}_{0}}$ 与 $f_{k}^{i}$ 、 ${{g}_{k}}$ 、 ${{\pmb{\textbf{w}}}_{k}}$ 和 $\pmb{\textbf{v}}_{k}^{i}$ 均不相关, 并定义 ${{X}_{0, 0}}:={\rm E}\{{{\pmb{\textbf{x}}}_{0}}\pmb{\textbf{x}}_{0}^{{\rm T}}\}$ .
假设第 $i$ 个子系统(1)和(2)的局部最优(线性最小方差意义下)状态估计记为 $\hat{\pmb{\textbf{x}}}_{k}^{i}$ .在这里, 因为标准Kalman滤波器要求系统矩阵是确定的, 且系统噪声为协方差已知的白噪声, 而本文所研究的系统方程(1)中, 系统矩阵 $({{A}_{k}}+{{g}_{k}}{{\hat{A}}_{k}})$ 中存在乘性随机噪声 ${{g}_{k}}$ , 使得每一时刻系统矩阵不再是确定的, 且并未假设 ${{g}_{k}}$ 是白噪声, 因此标准Kalman滤波器不适合解决系统模型(1)和(2)的最优估计问题.所以, 为得到具有传感器增益退化和模型不确定性子系统的局部最优状态估计, 本文采用如下滤波器的形式:
$ \hat{\pmb{\textbf{x}}}_{k+1}^{i}=L_{k}^{i}(\pmb{\textbf{y}}_{k}^{i}-\bar{f}_{k}^{i}C_{k}^{i}\hat{\pmb{\textbf{x}}}_{k}^{i})+({{A}_{k}}+{{\bar{g}}_{k}}{{\hat{A}}_{k}})\hat{\pmb{\textbf{x}}}_{k}^{i} $
(3) 其中, $L_{k}^{i}$ 表示局部滤波增益, 局部最优误差协方差矩阵为 $P_{k}^{i, i}:={\rm E}\{({{\pmb x}_{k}}-\hat{\pmb x}_{k}^{i}){{({{\pmb x}_{k}}-\hat{\pmb x}_{k}^{i})}^{\rm T}}\}$ , 局部最优误差交叉协方差矩阵为 $P_{k}^{i, j}:={\rm E}\{({{\pmb x}_{k}}-\hat{\pmb x}_{k}^{i}){{({{\pmb x}_{k}}-\hat{\pmb x}_{k}^{j})}^{\rm T}}\}$ .
下面给出定理1证明滤波器(3)是无偏的.
定理1.在满足 ${{\hat{\pmb{\textbf{x}}}}_{0}}={\rm E}\{{{\pmb{\textbf{x}}}_{0}}\}$ 的前提下, 式(3)所描述的滤波器是无偏的.
证明.利用数学归纳法, 令 $\tilde{\pmb{\textbf{x}}}_{k}^{i}={{\pmb{\textbf{x}}}_{k}}-\hat{\pmb{\textbf{x}}}_{k}^{i}$ , 当 $k=0$ 时, ${{\hat{\pmb{\textbf{x}}}}_{0}}={\rm E}\{{{\pmb{\textbf{x}}}_{0}}\}$ , 假设 $k$ 时刻 ${\rm E}\{\tilde{\pmb{\textbf{x}}}_{k}^{i}\}=0$ , 则 $k+1$ 时刻, 有
$ {\rm E}\{\tilde{\pmb{\textbf{x}}}_{k+1}^{i}\}={\rm E}\{({{A}_{k}}+{{g}_{k}}{{{\hat{A}}}_{k}}){{\pmb{\textbf{x}}}_{k}}+{{\pmb{\textbf{w}}}_{k}}\}-\nonumber\\ ({{A}_{k}}+{{{\bar{g}}}_{k}}{{{\hat{A}}}_{k}})\hat{\pmb{\textbf{x}}}_{k}^{i}-L_{k}^{i}({\rm E}\{\pmb{\textbf{y}}_{k}^{i}\}-\bar{f}_{k}^{i}C_{k}^{i}\hat{\pmb{\textbf{x}}}_{k}^{i})=\nonumber\\ [({{A}_{k}}+{{{\bar{g}}}_{k}}{{{\hat{A}}}_{k}})-L_{k}^{i}\bar{f}_{k}^{i}C_{k}^{i}]{\rm E}\{\tilde{\pmb{\textbf{x}}}_{k}^{i}\}=0 $
(4) 为方便运算, 定义运算符号 $co{{l}_{i}}({{D}_{i}}):={{[D_{1}^{\rm T}, \cdots, D_{i}^{\rm T}, \cdots, D_{N}^{{\rm T}}]}^{{\rm T}}}$ , 根据最优线性无偏估计方法, [15-18], 最优分布式融合估计器为:
$ \hat{\pmb{\textbf{x}}}_{k}^{o}={{(I_{o}^{{\rm T}}P_{k}^{-1}{{I}_{o}})}^{-1}}I_{o}^{{\rm T}}P_{k}^{-1}{{\pmb{\textbf{z}}}_{k}} $
(5) 其中, $\hat{\pmb{\textbf{x}}}_{k}^{o}$ 表示融合估计值, ${{I}_{o}}:={col}_{i}({{I}_{n}})$ , ${{I}_{n}}$ 表示 $n$ 维单位矩阵, ${{\pmb{\textbf{z}}}_{k}}:={col}_{i}(\hat{\pmb{\textbf{x}}}_{k}^{i})$ , ${{P}_{k}}=\left[{matrix} P_{k}^{1, 1} & \cdots & P_{k}^{1, N} \\ \vdots & \ddots & \vdots \\ P_{k}^{N, 1} & \cdots & P_{k}^{N, N} \\ {matrix} \right]$ .最小融合估计误差协方差矩阵 $P_{k}^{o}:={\rm E}\{({{\pmb{\textbf{x}}}_{k}}-\hat{\pmb{\textbf{x}}}_{k}^{o}){{({{\pmb{\textbf{x}}}_{k}}-\hat{\pmb{\textbf{x}}}_{k}^{o})}^{{\rm T}}}\}$ 为:
$ P_{k}^{o}={{(I_{o}^{{\rm T}}P_{k}^{-1}{{I}_{o}})}^{-1}} $
(6) 在分布式框架下, 随机时延和丢包现象存在于局部最优状态估计向融合中心传输的过程中, 本文将传输时延和丢包描述为:
$ \left\{ {\begin{array}{l} {\pmb{\textbf{z}}_{k}^{i}=\sum\limits_{m=0}^{L}{\delta (\tau _{k}^{i}, m)\hat{\pmb{\textbf{x}}}_{k-m}^{i}}, \quad 0\le m\le L} \\ \hat{\pmb{\textbf{x}}}_{d}^{i}=0, ~~~~~~~~d=-L, -L+1, \cdots, -1\\ \end{array}} \right. $
(7) 其中, $\pmb{\textbf{z}}_{k}^{i}\in {{\bf R}^{n}}$ 表示经第 $i$ 通道到达融合中心的信号, $L$ 表示最大时延, $\delta (\cdot)$ 是标准Dirca函数, 并满足 ${\rm E}\{\delta (\tau _{k}^{i}, m)\}={\rm Prob}\{\tau _{k}^{i}=m\}=p_{m, k}^{i}$ , $\sum_{m=0}^{L}{p_{m, k}^{i}}\le 1$ . $\tau_{k}^{i}=m$ 表示 $k$ 时刻第 $i$ 通道的传输时延为 $m$ .显然, 数据丢包发生的概率为 $-\sum_{m=0}^{L}{p_{m, k}^{i}}$ .
针对不同时刻数据包可能会同时到达融合中心的情况, 采用文献[19]提出的信号存储原则, 每个时刻的局部最优估计 $\hat{\pmb{\textbf{x}}}_{k}^{i}$ 在被发送前已经被标记好时间顺序, 融合中心根据所收到信号的标记, 只存储最新时刻的数据包, 丢掉其他数据包.
由于时延和丢包的存在, 在 $k$ 时刻, 经第 $i$ 通道到达融合中心的局部最优状态估计为 $\hat{\pmb{\textbf{x}}}_{k-m}^{i}~(m=0, 1, \cdots, L)$ , 或者发生数据丢包.因此, 不能将此时的信号直接用于分布式融合估计.为此, 设 $\hat{\pmb{\textbf{x}}}_{r, k}^{i}$ 为 $k$ 时刻第 $i$ 通道在融合中心端用于设计分布式融合估计器的局部重组状态估计, 下角标`` $r$ "表示重组, `` $k$ "表示 $k$ 时刻, 上角标`` $i$ "表示第 $i$ 通道. $\hat{\pmb{\textbf{x}}}_{r, k}^{i}$ 的形式可描述为:
$ \hat{\pmb{\textbf{x}}}_{r, k}^{i}=\sum\limits_{m=0}^{L}{\Bigg[\delta (\tau _{k}^{i}, m)}\prod\limits_{\tau=1}^{m}{({{A}_{k-\tau }}+{{{\bar{g}}}_{k-\tau }}{{{\hat{A}}}_{k-\tau }})\hat{\pmb{\textbf{x}}}_{k-m}^{i}}\Bigg] +\nonumber\\ \left[1-\sum\limits_{m=0}^{L}{\delta(\tau_{k}^{i}, m)}\right]({{A}_{k-1}}+{{{\bar{g}}}_{k-1}}{{{\hat{A}}}_{k-1}})\hat{\pmb{\textbf{x}}}_{r, k-1}^{i} $
(8) 式(8)的含义为:发生时延 $m$ 时, $k$ 时刻经第 $i$ 通道到达融合中心的时延信号为 $\hat{\pmb{\textbf{x}}}_{k-m}^{i}$ , 则对应的局部重组状态估计取为 $\hat{\pmb{\textbf{x}}}_{k-m}^{i}$ 的 $m$ 步预测值, 即为 $\prod_{\tau=1}^{m}{({{A}_{k-\tau }}+{{{\bar{g}}}_{k-\tau }}{{{\hat{A}}}_{k-\tau }})\hat{\pmb{\textbf{x}}}_{k-m}^{i}}$ ; 发生数据丢包时, 则取上一时刻第 $i$ 通道的局部重组状态估计的一步预测值作为本时刻的局部重组状态估计, 即为 $({{A}_{k-1}}+{{\bar{g}}_{k-1}}{{\hat{A}}_{k-1}})\hat{\pmb{\textbf{x}}}_{r, k-1}^{i}$ .
针对上述具有传感器增益退化、模型不确定性、随机时延和丢包的多传感器融合估计系统, 本文要解决的问题是:
1) 针对第 $i$ 个子系统(1)和(2), 设计局部增益 $L_{k}^{i}$ , 使得局部估计误差协方差最小.
2) 基于所设计的局部滤波增益 $L_{k}^{i}$ 及相应的 $N$ 个局部重组状态估计 $\hat{\pmb{\textbf{x}}}_{r, k}^{i}$ , 根据最优线性无偏估计方法, 得到分布式融合估计器的递推形式.
2. 局部最优滤波增益设计
在引出主要结论之前, 首先定义如下算子:
$ \left\{ {\begin{array}{l} {{X}_{k, k}}:={\rm E}\{{{\pmb{\textbf{x}}}_{k}}\pmb{\textbf{x}}_{k}^{{\rm T}}\}, Y_{k, k}^{i, j}:={\rm E}\{\pmb{\textbf{y}}_{k}^{i}\pmb{\textbf{y}}{{_{k}^{j}}^{{\rm T}}}\} \nonumber\\ H_{k, k}^{i}:={\rm E}\{{{\pmb{\textbf{x}}}_{k}}\pmb{\textbf{y}}{{_{k}^{i}}^{{\rm T}}}\}, \Lambda _{k, k}^{i}:={\rm E}\{{{\pmb{\textbf{x}}}_{k}}\hat{\pmb{\textbf{x}}}{{_{k}^{i}}^{{\rm T}}}\} \nonumber\\ M_{k, k}^{i, j}:={\rm E}\{\hat{\pmb{\textbf{x}}}_{k}^{i}\pmb{\textbf{y}}{{_{k}^{j}}^{{\rm T}}}\}, \Gamma _{k, k}^{i, j}:={\rm E}\{\hat{\pmb{\textbf{x}}}_{k}^{i}\hat{\pmb{\textbf{x}}}{{_{k}^{j}}^{{\rm T}}}\} \nonumber\\ {{A}_{\bar{g}, k}}:={{A}_{k}}+{{{\bar{g}}}_{k}}{{{\hat{A}}}_{k}}, {{A}_{g, k}}:={{A}_{k}}+{{g}_{k}}{{{\hat{A}}}_{k}}\nonumber\\ \end{array}} \right. $
(9) 定理2.对于第 $i$ 个子系统(1)和(2), 使得局部滤波器(3)误差协方差最小的局部滤波增益的递推形式为:
$ L_{k}^{i}=S{{_{k}^{i}}^{{\rm T}}}{{(T_{k}^{i})}^{-1}} $
(10) 局部最优误差协方差递推形式为:
$ P_{k+1}^{i, i}={{A}_{\bar{g}, k}}P_{k}^{i, i}{{A}_{\bar{g}, k}}^{{\rm T}}-S{{_{k}^{i}}^{{\rm T}}}{{(T_{k}^{i})}^{-1}}S_{k}^{i}+{{W}_{k}}+\nonumber\\ ({{{\tilde{g}}}_{k}}-\bar{g}_{k}^{2}){{{\hat{A}}}_{k}}{{X}_{k, k}}\hat{A}_{k}^{{\rm T}} $
(11) 局部最优误差交叉协方差递推形式为:
$ P_{k+1}^{i, j}={{A}_{\bar{g}, k}}P_{k}^{i, j}{{A}_{\bar{g}, k}}^{{\rm T}}+{{W}_{k}}-{{A}_{\bar{g}, k}}[H_{k, k}^{j}-M_{k, k}^{i, j} +\nonumber\\~~~\bar{f}_{k}^{j}C_{k}^{j{\rm T}}(\Gamma _{k, k}^{i, j}-\Lambda _{k, k}^{j})]L_{k}^{j{\rm T}}+({{{\tilde{g}}}_{k}}-\bar{g}_{k}^{2}){{{\hat{A}}}_{k}}{{X}_{k, k}}\hat{A}_{k}^{{\rm T}}-\nonumber\\~~~L_{k}^{i}[H_{k, k}^{i{\rm T}}-M_{k, k}^{j, i{\rm T}}+\bar{f}_{k}^{i}C_{k}^{i}{{(\Gamma _{k, k}^{j, i}-\Lambda _{k, k}^{i})}^{{\rm T}}}]{{A}_{\bar{g}, k}}^{{\rm T}} +\nonumber\\~~~L_{k}^{i}(\bar{f}_{k}^{i}\bar{f}_{k}^{j}C_{k}^{i}{{X}_{k, k}}C_{k}^{j{\rm T}}-\bar{f}_{k}^{j}M_{k, k}^{j, i{\rm T}}C_{k}^{j{\rm T}}-\bar{f}_{k}^{i}C_{k}^{i}M_{k, k}^{i, j}+\nonumber\\~~~\bar{f}_{k}^{i}\bar{f}_{k}^{j}C_{k}^{i}\Gamma _{k, k}^{i, j}C_{k}^{j{\rm T}})L_{k}^{j{\rm T}} $
(12) 其中, 各量递推公式为:
$ S_{k}^{i}=[H{{_{k, k}^{i}}^{{\rm T}}}-M{{_{k, k}^{i, i}}^{{\rm T}}}+\bar{f}_{k}^{i}C_{k}^{i}{{(\Gamma_{k, k}^{i, i}-\Lambda_{k, k}^{i})}^{{\rm T}}}]{{A}_{\bar{g}, k}}^{{\rm T}} $
(13) $ T_{k}^{i}=\tilde{f}_{k}^{i}C_{k}^{i}{{X}_{k, k}}C{{_{k}^{i}}^{{\rm T}}}-\bar{f}_{k}^{i}M{{_{k, k}^{i, i}}^{{\rm T}}}C{{_{k}^{i}}^{{\rm T}}}-\bar{f}_{k}^{i}C_{k}^{i}M_{k, k}^{i, i}+\nonumber\\ {{(\bar{f}_{k}^{i})}^{2}}C_{k}^{i}\Gamma _{k, k}^{i, i}C{{_{k}^{i}}^{{\rm T}}}+V_{k}^{i} $
(14) $ {{X}_{k, k}}={{A}_{k-1}}{{X}_{k-1, k-1}}A_{k-1}^{{\rm T}}+{{{\bar{g}}}_{k-1}}({{A}_{k-1}}{{X}_{k-1, k-1}}\times\nonumber\\ \hat{A}_{k-1}^{{\rm T}} +{{{\hat{A}}}_{k-1}}{{X}_{k-1, k-1}}A_{k-1}^{{\rm T}})+{{{\tilde{g}}}_{k-1}}{{{\hat{A}}}_{k-1}}\nonumber\times\\ {{X}_{k-1, k-1}}\hat{A}_{k-1}^{{\rm T}}+{{W}_{k}} $
(15) $ Y_{k}^{i, j}=\bar{f}_{k}^{i}\bar{f}_{k}^{j}C_{k}^{i}{{X}_{k, k}}C{{_{k}^{j}}^{{\rm T}}} $
(16) $ H_{k}^{i}=\bar{f}_{k}^{i}{{X}_{k, k}}C{{_{k}^{i}}^{{\rm T}}} $
(17) $ \Lambda _{k, k}^{i}={{A}_{\bar{g}, k-1}}(H_{k-1, k-1}^{i}-\bar{f}_{k-1}^{i}\Lambda _{k-1, k-1}^{i}C{{_{k-1}^{i}}^{{\rm T}}}) \times\nonumber\\ L_{k-1}^{i{\rm T}} +{{A}_{\bar{g}, k-1}}\Lambda _{k-1, k-1}^{i}{{A}_{\bar{g}, k-1}}^{{\rm T}} $
(18) $ M_{k, k}^{i, j}=\bar{f}_{k}^{j}\Lambda {{_{k, k}^{i}}^{{\rm T}}}C{{_{k}^{j}}^{{\rm T}}} $
(19) $ \Gamma _{k, k}^{i, j}=L_{k-1}^{i}(Y_{k-1}^{i, j}-\bar{f}_{k-1}^{j}M{{_{k-1, k-1}^{j, i}}^{{\rm T}}}C{{_{k-1}^{j}}^{{\rm T}}}-\nonumber\\~~~~\bar{f}_{k-1}^{i}C_{k-1}^{i}M_{k-1, k-1}^{i, j}+\bar{f}_{k-1}^{i}\bar{f}_{k-1}^{j}C_{k-1}^{i}\Gamma _{k-1, k-1}^{i, j}\times \nonumber\\~~~~C{{_{k-1}^{j}}^{{\rm T}}})L{{_{k-1}^{j}}^{{\rm T}}}+{{A}_{\bar{g}, k-1}}\Gamma _{k-1, k-1}^{i, j}{{A}_{\bar{g}, k-1}}^{{\rm T}} +\nonumber\\~~~~L_{k-1}^{i}(M{{_{k-1, k-1}^{j, i}}^{{\rm T}}}-\bar{f}_{k-1}^{i}C_{k-1}^{i}\Gamma _{k-1, k-1}^{i, j}){{A}_{\bar{g}, k-1}}^{{\rm T}} + \nonumber\\~~~~{{A}_{\bar{g}, k-1}}(M_{k-1, k-1}^{i, j}-\bar{f}_{k-1}^{j}\Gamma _{k-1, k-1}^{i, j}C{{_{k-1}^{j}}^{{\rm T}}})L{{_{k-1}^{j}}^{{\rm T}}} $
(20) 并且, 根据假设2, ${{X}_{0, 0}}$ 为已知, 其他变量初值设置如下:
$ \left\{ {\begin{array}{l} Y_{0, 0}^{i, j}=\bar{f}_{0}^{i}\bar{f}_{0}^{j}C_{0}^{i}{{X}_{0, 0}}C{{_{0}^{j}}^{{\rm T}}}\nonumber\\ H_{0, 0}^{i}=\bar{f}_{0}^{i}{{X}_{0, 0}}C{{_{0}^{i}}^{{\rm T}}}\nonumber\\ \Lambda _{0, 0}^{i}={\rm E}\{{{{\pmb{\textbf{x}}}}_{0}}\}{\rm E}\{{{\pmb{\textbf{x}}}_{0}}^{{\rm T}}\}\nonumber\\ M_{0, 0}^{i, j}=\bar{f}_{0}^{j}\Lambda {{_{0, 0}^{i}}^{{\rm T}}}C{{_{0}^{j}}^{{\rm T}}}\nonumber\\ \Gamma _{0, 0}^{i, j}={\rm E}\{{{\pmb{\textbf{x}}}_{0}}\}{\rm E}\{{{\pmb{\textbf{x}}}_{0}}^{{\rm T}}\} \nonumber\\ \end{array}} \right. $
(21) 证明.下面证明式(10), 由式(1)~(3)可得:
$ \tilde{\pmb{\textbf{x}}}_{k+1}^{i}={{\pmb{\textbf{x}}}_{k+1}}-\hat{\pmb{\textbf{x}}}_{k+1}^{i}=\nonumber\\ ({{A}_{k}}+{{{\bar{g}}}_{k}}{{{\hat{A}}}_{k}})\tilde{\pmb{\textbf{x}}}_{k}^{i}+({{g}_{k}}-{{{\bar{g}}}_{k}}){{{\hat{A}}}_{k}}{{\pmb{\textbf{x}}}_{k}}+{{\pmb{\textbf{w}}}_{k}}-\nonumber\\ L_{k}^{i}(\pmb{\textbf{y}}_{k}^{i}-\bar{f}_{k}^{i}C_{k}^{i}\hat{\pmb{\textbf{x}}}_{k}^{i}) $
(22) 结合式(9)以及假设1和假设2, 可得:
$ P_{k+1}^{i, i}:={\rm E}\{({{\pmb{\textbf{x}}}_{k+1}}-\hat{\pmb{\textbf{x}}}_{k+1}^{i}){{({{\pmb{\textbf{x}}}_{k+1}}-\hat{\pmb{\textbf{x}}}_{k+1}^{i})}^{{\rm T}}}\}=\nonumber\\ {{A}_{\bar{g}, k}}P_{k}^{i, i}{{A}_{\bar{g}, k}}^{{\rm T}}+({{{\tilde{g}}}_{k}}-\bar{g}_{k}^{2}){{{\hat{A}}}_{k}}{{X}_{k, k}}\hat{A}_{k}^{{\rm T}}-\nonumber\\ {{A}_{\bar{g}, k}}[H_{k, k}^{i}-M_{k, k}^{i, i}+\bar{f}_{k}^{i}(\Gamma _{k, k}^{i, i}-\Lambda _{k, k}^{i})C{{_{k}^{i}}^{{\rm T}}}]L{{_{k}^{i}}^{{\rm T}}}-\nonumber\\ L_{k}^{i}{{[H_{k, k}^{i}-M_{k, k}^{i, i}+\bar{f}_{k}^{i}(\Gamma _{k, k}^{i, i}-\Lambda _{k, k}^{i})C{{_{k}^{i}}^{{\rm T}}}]}^{{\rm T}}}{{A}_{\bar{g}, k}}^{{\rm T}} +\nonumber\\ L_{k}^{i}[\tilde{f}_{k}^{i}C_{k}^{i}{{X}_{k, k}}C{{_{k}^{i}}^{{\rm T}}}+{{(\bar{f}_{k}^{i})}^{2}}C_{k}^{i}\Gamma _{k, k}^{i, i}C{{_{k}^{i}}^{{\rm T}}}-\nonumber\\ \bar{f}_{k}^{i}C_{k}^{i}M_{k, k}^{i, i}-\bar{f}_{k}^{i}M{{_{k, k}^{i, i}}^{{\rm T}}}C{{_{k}^{i}}^{{\rm T}}}+V_{k}^{i}]L{{_{k}^{i}}^{\rm T}}+{{W}_{k}} \nonumber\\ $
(23) 下面令
$ S_{k}^{i}=[H{{_{k, k}^{i}}^{{\rm T}}}-M{{_{k, k}^{i, i}}^{{\rm T}}}+\bar{f}_{k}^{i}C_{k}^{i}{{(\Gamma _{k, k}^{i, i}-\Lambda _{k, k}^{i})}^{{\rm T}}}]{{A}_{\bar{g}, k}}^{{\rm T}} $
(24) $ T_{k}^{i}=\tilde{f}_{k}^{i}C_{k}^{i}{{X}_{k, k}}C{{_{k}^{i}}^{{\rm T}}}-\bar{f}_{k}^{i}M{{_{k, k}^{i, i}}^{{\rm T}}}C{{_{k}^{i}}^{{\rm T}}}-\bar{f}_{k}^{i}C_{k}^{i}M_{k, k}^{i, i} +\nonumber\\ {{(\bar{f}_{k}^{i})}^{2}}C_{k}^{i}\Gamma _{k, k}^{i, i}C{{_{k}^{i}}^{{\rm T}}}+V_{k}^{i} $
(25) 将式(24)和式(25)代入式(23)可得:
$ P_{k+1}^{i, i}={{A}_{\bar{g}, k}}P_{k}^{i, i}{{A}_{\bar{g}, k}}^{{\rm T}}+({{{\tilde{g}}}_{k}}-\bar{g}_{k}^{2}){{{\hat{A}}}_{k}}{{X}_{k, k}}\hat{A}_{k}^{{\rm T}}+{{W}_{k}}-\nonumber\\ S{{_{k}^{i}}^{{\rm T}}}L{{_{k}^{i}}^{{\rm T}}}-L_{k}^{i}S_{k}^{i}+L_{k}^{i}T_{k}^{i}L{{_{k}^{i}}^{{\rm T}}}+{{W}_{k}}=\nonumber\\ (L_{k}^{i}T_{k}^{i}-S{{_{k}^{i}}^{{\rm T}}}){{(T_{k}^{i})}^{-1}}{{(L_{k}^{i}T_{k}^{i}-S{{_{k}^{i}}^{{\rm T}}})}^{-1}}+{{W}_{k}}+\nonumber\\ {{A}_{\bar{g}, k}}P_{k}^{i, i}{{A}_{\bar{g}, k}}^{{\rm T}}+({{{\tilde{g}}}_{k}}-\bar{g}_{k}^{2}){{{\hat{A}}}_{k}}{{X}_{k, k}}\hat{A}_{k}^{{\rm T}}-\nonumber\\ S{{_{k}^{i}}^{{\rm T}}}{{(T_{k}^{i})}^{-1}}S_{k}^{i} $
(26) 令 $L_{k}^{i}=S{{_{k}^{i}}^{{\rm T}}}{{(T_{k}^{i})}^{-1}}$ , 则式(23)中 $P_{k+1}^{i, i}$ 最小, 得到式(11)和式(12).
需要特别指出的是, 定理2与文献[13]中提出的定理1在形式上有很多相似之处, 这是因为本文求取传感器 $i$ 的局部最优状态估计和文献[13]求取全局融合估计, 都是基于最小方差估计方法, 中间变量的定义和结论推导在形式上有相似之处, 但是二者各自定义的中间变量有明显不同的意义.本文采用的是分布式融合估计, 即先利用传感器 $i$ 在 $k$ 时刻的测量数据 $\pmb{\textbf{y}}_{k}^{i}$ 得到局部最优估计 $\hat{\pmb{\textbf{x}}}_{k}^{i}$ , 时延和丢包发生在 $\hat{\pmb{\textbf{x}}}_{k}^{i}$ 传送至融合中心的过程中, 定理2求取的是局部最优估计, 且式(9)中各中间变量是基于传感器 $i$ 定义的, 未加入时延和丢包环节, 而文献[13]中定理1虽采用与本文中式(3)形式一致的滤波器结构, 但其采用的是集中式融合估计方法, 融合中心直接利用所有传感器的测量数据进行融合估计, 时延和丢包发生在测量数据 $\pmb{\textbf{y}}_{k}^{i}$ 传送至融合中心的过程中, 所定义的各中间变量是基于全局的, 具有明显的时延特征.
3. 分布式融合估计器
在得到主要结论之前, 首先介绍如下两个引理.
引理1.定义矩阵 $A_{\bar{g}, \bar{f}, m}^{i}:=({{A}_{m}}+{{\bar{g}}_{m}}{{\hat{A}}_{m}})-\bar{f}_{m}^{i}L_{m}^{i}C_{m}^{i}$ , 并假定算子 $\prod_{e=1}^{0}{(\cdot)}={{I}_{n}}$ .则对于 $\Gamma_{m, n}^{i, j}:={\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}\}~(m\ge0, n\ge0)$ , 有
1) 情况1: $m=n$ 时,
$ \Gamma _{m, n}^{i, j}=\Gamma _{m, m}^{i, j} $
(27) 2) 情况2: $m-n=1$ 时,
$ \Gamma _{m, n}^{i, j}=A_{\bar{g}, \bar{f}, m-1}^{i}\Gamma _{m-1, m-1}^{i, j}+\bar{f}_{m-1}^{i}L_{m-1}^{i}C_{m-1}^{i}\times\nonumber\\ \Lambda_{m-1, m-1}^{j} $
(28) 3) 情况3: $m-n\ge 2$ 时,
$ \Gamma _{m, n}^{i, j}=\bar{f}_{m-1}^{i}L_{m-1}^{i}C_{m-1}^{i}(\prod\limits_{e=1}^{m-n-1}{{{A}_{\bar{g}, m-1-e}}})\Lambda _{n, n}^{j} +\nonumber\\ (\prod\limits_{f=1}^{m-n}{A_{\bar{g}, \bar{f}, m-f}^{i})}\Gamma _{n, n}^{i, j}\sum\limits_{c=2}^{m-n}{[\bar{f}_{m-c}^{i}(\prod\limits_{d=1}^{c-1}{A_{\bar{g}, \bar{f}, m-d}^{i}})}+\nonumber\\ L_{m-c}^{i}C_{m-c}^{i}(\prod\limits_{h=1}^{m-n-c}{{{A}_{\bar{g}, m-c-h}})\Lambda _{n, n}^{j}]} $
(29) 4) 情况4: $n-m=1$ 时,
$ \Gamma _{m, n}^{i, j}=\Gamma _{n-1, n-1}^{i, j}A{{_{\bar{g}, \bar{f}, n-1}^{j}}^{{\rm T}}}+\bar{f}_{n-1}^{j}\Lambda {{_{n-1, n-1}^{i}}^{{\rm T}}} \times\nonumber\\ C{{_{n-1}^{j}}^{{\rm T}}}L{{_{n-1}^{j}}^{{\rm T}}} $
(30) 5) 情况5: $n-m\ge 2$ 时,
$ \Gamma _{m, n}^{i, j}\!=\! \bar{f}_{n-1}^{j}\Lambda {{_{m, m}^{i}}^{{\rm T}}}(\prod\limits_{e=1}^{n-m-1}{{{A}_{\bar{g}, n-1-e}}{{)}^{{\rm T}}}}C{{_{n-1}^{j}}^{{\rm T}}}L{{_{n-1}^{j}}^{{\rm T}}} +\nonumber\\ \sum\limits_{c=2}^{n-m}{[\bar{f}_{n-c}^{j}\Lambda {{_{m, m}^{i}}^{{\rm T}}}(\prod\limits_{h=1}^{n-m-c}{{{A}_{\bar{g}, n-c-h}}{{)}^{{\rm T}}}C{{_{n-c}^{j}}^{{\rm T}}}}}\times \nonumber\\ L{{_{n-c}^{j}}^{{\rm T}}}{{(\prod\limits_{d=1}^{c-1}{A_{\bar{g}, \bar{f}, n-d}^{j}})}^{{\rm T}}}]+\Gamma _{m, m}^{i, j}(\prod\limits_{f=1}^{n-m}{A_{\bar{g}, \bar{f}, n-f}^{j}{{)}^{{\rm T}}}} \nonumber\\ $
(31) 对于 $\Lambda_{m, n}^{i}:={\rm E}\{{{\pmb{\textbf{x}}}_{m}}\hat{\pmb{\textbf{x}}}{{_{n}^{i}}^{{\rm T}}}\}$ , 有:
1) 情况1: $m=n$ 时,
$ \Lambda _{m, n}^{i}=\Lambda _{m, m}^{i} $
(32) 2) 情况2: $m-n\ge1$ 时,
$ \Lambda _{m, n}^{i}=(\prod\limits_{\tau=1}^{m-n}{{{A}_{\bar{g}, m-1}}})\Lambda _{n, n}^{i} $
(33) 3) 情况3: $n-m=1$ 时,
$ \Lambda _{m, n}^{i}=H_{n-1, n-1}^{i}L{{_{n-1}^{i}}^{{\rm T}}}+\Lambda _{n-1, n-1}^{i}A{{_{\bar{g}, \bar{f}, n-1}^{i}}^{{\rm T}}} $
(34) 4) 情况4: $n-m\ge 2$ 时,
$ \Lambda _{m, n}^{i}=\bar{f}_{n-1}^{i}{{X}_{m, m}}(\prod\limits_{e=1}^{n-m-1}{{{A}_{\bar{g}, n-1-e}}})^{\rm T}C{{_{n-1}^{i}}^{{\rm T}}}L{{_{n-1}^{i}}^{{\rm T}}} +\nonumber\\ \sum\limits_{c=2}^{n-m}{[\bar{f}_{n-c}^{i}{{X}_{m, m}}(\prod\limits_{h=1}^{n-m-c}{{{A}_{\bar{g}, n-c-h}}{{)}^{{\rm T}}}C{{_{n-c}^{i}}^{{\rm T}}}}} \times \nonumber\\ L{{_{n-c}^{i}}^{{\rm T}}}{{(\prod\limits_{d=1}^{c-1}{A_{\bar{g}, \bar{f}, n-d}^{i}})}^{{\rm T}}}]+\Lambda _{m, m}^{i} \times \nonumber\\ (\prod\limits_{f=1}^{n-m}{A_{\bar{g}, \bar{f}, n-f}^{i}{{)}^{{\rm T}}}} $
(35) 由于引理1证明过程较繁琐, 为增加文章可读性, 具体证明过程见附录A.
引理 2定义如下变量:
$~~\left\{ {\begin{array}{l} \pmb{\textbf{r}}_{m+1}^{i}:=\!\!\sum\limits_{t=0}^{L}{[\delta (\tau _{m+1}^{i}, t)\prod\limits_{\tau=1}^{t}{({{A}_{m+1-\tau }}}}+{{{\bar{g}}}_{m+1-\tau }} \times\nonumber\\~~~~~~~~~~~~~~~{{{\hat{A}}}_{m+1-\tau }})\hat{\pmb{\textbf{x}}}_{m+1-t}^{i}] \nonumber\\ Y_{r, m, n}^{i, j}:={\rm E}\{\pmb{\textbf{y}}_{m}^{i}\hat{\pmb{\textbf{x}}}{{_{r, n}^{j}}^{{\rm T}}}\}, R_{m, n}^{i, j}:={\rm E}\{\pmb{\textbf{r}}_{m}^{i}\pmb{\textbf{r}}{{_{n}^{j}}^{{\rm T}}}\} \nonumber\\ R_{y, m, n}^{i, j}:={\rm E}\{\pmb{\textbf{y}}_{m}^{i}\pmb{\textbf{r}}{{_{n}^{j}}^{{\rm T}}}\}, R_{x, m, n}^{i}:={\rm E}\{\pmb{\textbf{r}}_{m}^{i}{{\pmb{\textbf{x}}}_{n}}^{{\rm T}}\} \nonumber\\ \bar{R}_{x, m, n}^{i, j}:={\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}\pmb{\textbf{r}}{{_{n}^{j}}^{{\rm T}}}\}, \hat{R}_{x, m, n}^{i, j}:={\rm E}\{\pmb{\textbf{r}}_{m}^{i}\hat{\pmb{\textbf{x}}}{{_{r, n}^{j}}^{{\rm T}}}\} \nonumber\\ X_{r, m, n}^{i, j}:={\rm E}\{\hat{\pmb{\textbf{x}}}_{r, m}^{i}\hat{\pmb{\textbf{x}}}{{_{r, n}^{j}}^{{\rm T}}}\}, \bar{X}_{r, m, n}^{i, j}:={\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}\pmb{\textbf{r}}{{_{n}^{j}}^{{\rm T}}}\} \nonumber\\ \hat{X}_{r, m, n}^{i}:={\rm E}\{{{\pmb{\textbf{x}}}_{m}}\hat{\pmb{\textbf{x}}}{{_{r, n}^{i}}^{{\rm T}}}\}, \hat{X}_{r, m, n}^{i, j}:={\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}\hat{\pmb{\textbf{x}}}{{_{r, n}^{j}}^{{\rm T}}}\} \nonumber\\ \Phi _{m, k}^{i}:=\sum\limits_{m=0}^{L}{\delta (\tau _{k}^{i}, m), \bar{\Phi }_{m, k}^{i}:=1-\sum\limits_{m=0}^{L}{\delta (\tau _{k}^{i}, m)}} \nonumber\\ p_{L, m, k}^{i}:=\sum\limits_{m=0}^{L}{p_{m, k}^{i}, ~\bar{p}_{L, m, k}^{i}:=1-\sum\limits_{m=0}^{L}{p_{m, k}^{i}}} \end{array}} \right. $
(36) 则有下式成立:
$ R_{k+1, k+1}^{i, j}=\left\{ \begin{matrix} \sum\limits_{m=0}^{L}{\sum\limits_{n=0}^{L}{[p_{m, k+1}^{i}p_{n, k+1}^{j}(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }})}}}\times \\ \Gamma _{k+1-m, k+1-n}^{i, j}(\prod\limits_{s=1}^{n}{{{A}_{\bar{g}, k+1-s}}{{)}^{\text{T}}}}], ~~i\ne j \\ \sum\limits_{m=0}^{L}{[p_{m, k+1}^{i}(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }})}\Gamma _{k+1-m, k+1-m}^{i, i}}\times \\ (\prod\limits_{s=1}^{m}{{{A}_{\bar{g}, k+1-\tau }}{{)}^{\text{T}}}]}, ~~i=j \\ \end{matrix} \right. $
(37) $ \hat{R}_{x, k+1, k}^{i, j}=\sum\limits_{m=0}^{L}{[p_{m, k+1}^{i}(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }})}}\hat{X}_{r, k+1-m, k}^{i, j}] $
(38) $ R_{x, k+1, k}^{i}=\sum\limits_{m=0}^{L}{[p_{m, k+1}^{i}}(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }})\Lambda {{_{k, k+1-m}^{i}}^{{\rm T}}}]} $
(39) $ X_{r, k, k}^{i, j}=\nonumber\\ \left\{ {\begin{array}{l} R_{k, k}^{i, j}+\bar{p}_{L, m, k}^{i}{{A}_{\bar{g}, k-1}}\hat{R}{{_{x, k, k-1}^{j, i}}^{{\rm T}}} +\nonumber\\ \quad\bar{p}_{L, n, k}^{j}\hat{R}_{x, k, k-1}^{i, j}{{A}_{\bar{g}, k-1}}^{{\rm T}}+\bar{p}_{L, m, k}^{i} \times\nonumber\\ \quad\bar{p}_{L, n, k}^{j}{{A}_{\bar{g}, k-1}}X_{r, k-1, k-1}^{i, j}{{A}_{\bar{g}, k-1}}^{{\rm T}}, \, i\ne j \nonumber\\[5mm] R_{k, k}^{i, i}+\bar{p}_{L, m, k}^{i}{{A}_{\bar{g}, k-1}}\hat{R}{{_{x, k, k-1}^{i, i}}^{{\rm T}}} +\nonumber\\ \quad\bar{p}_{L, m, k}^{i}\hat{R}_{x, k, k-1}^{i, i}{{A}_{\bar{g}, k-1}}^{{\rm T}}+\bar{p}_{L, m, k}^{i}\times\nonumber\\ \quad{{A}_{\bar{g}, k-1}}X_{r, k-1, k-1}^{i, i}{{A}_{\bar{g}, k-1}}^{{\rm T}}, ~~~~~~~~~i=j \end{array}} \right. $
(40) $ \hat{X}_{r, k, k}^{i}=\bar{p}_{L, m, k}^{i}{{A}_{\bar{g}, k-1}}\hat{X}_{r, k-1, k-1}^{i}{{A}_{\bar{g}, k-1}}^{{\rm T}}+\nonumber\\ {{A}_{\bar{g}, k-1}}R{{_{x, k, k-1}^{i}}^{{\rm T}}} $
(41) $ \hat{X}_{r, k+1-m, k}^{i, j}=\nonumber\\ \left\{ {\begin{array}{l} L_{k}^{i}Y_{r, k, k}^{i, j}+A_{\bar{g}, \bar{f}, k}^{i}\hat{X}_{r, k, k}^{i, j}, ~~~~~~~~~~~~~~~~~~~~~~~m=0 \nonumber\\[4mm] L_{k-1}^{i}R_{y, k-1, k}^{i, j}+A_{\bar{g}, \bar{f}, k-1}^{i}\bar{X}_{r, k-1, k}^{i, j} +\nonumber\\ L_{k-1}^{i}\bar{p}_{L, n, k}^{j}Y_{r, k-1, k-1}^{i, j}{{A}_{\bar{g}, k-1}}^{{\rm T}} +\nonumber\\ A_{\bar{g}, \bar{f}, k-1}^{i}\bar{p}_{L, n, k}^{j}\times \hat{X}_{r, k-1, k-1}^{i, j}{{A}_{\bar{g}, k-1}}^{{\rm T}}, ~~~m=1 \nonumber\\[4mm] \sum\limits_{\tau=1}^{m-1}{[\bar{X}_{r, k+1-m, k-\tau }^{i, j}}{(\prod\limits_{s=1}^{\tau }{\bar{p}_{L, n, k+1-\tau }^{j}}{{A}_{\bar{g}, k-\tau }})^{\rm T}}]\times\nonumber\\ \hat{X}_{r, k+1-m, k+1-m}^{i, j}(\prod\limits_{t=1}^{m-1}{\bar{p}_{L, n, k+1-t}^{j}{{A}_{\bar{g}, k-t}}{{)}^{{\rm T}}}} +\nonumber\\ \bar{X}_{r, k+1-m, k}^{i, j}, ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~m>1\nonumber\\ \end{array}} \right. $
(42) $ Y_{r, k, k}^{i, j}=\bar{f}_{k}^{i}C_{k}^{i}\hat{X}_{r, k, k}^{j} $
(43) $ R_{y, k, k+1}^{i, j}=\bar{f}_{k}^{i}C_{k}^{i}R{{_{x, k, k+1}^{j}}^{{\rm T}}} $
(44) $ \bar{X}_{r, m, n}^{i, j}=\sum\limits_{s=0}^{L}{[p_{s, n}^{i}\Gamma _{m, n-s}^{i, j}(\prod\limits_{\tau=1}^{s}{{{A}_{\bar{g}, n-\tau }}{{)}^{{\rm T}}}]}} $
(45) 由于引理2证明过程较繁琐, 为增加文章可读性, 具体证明过程见附录B.
定义 $\tilde{\pmb{\textbf{x}}}_{r, k+1}^{i}:={{\pmb{\textbf{x}}}_{k+1}}-\hat{\pmb{\textbf{x}}}_{r, k+1}^{i}$ , 重组估计交叉误差协方差矩阵为 $P_{r, k+1}^{i, j}:={\rm E}\{\tilde{\pmb{\textbf{x}}}_{r, k+1}^{i}\tilde{\pmb{\textbf{x}}}{{_{r, k+1}^{j}}^{{\rm T}}}\}$ , 根据引理1和引理2的结论, 以下定理给出 $P_{r, k+1}^{i, j}$ 的计算方法.
定理3.基于式(36)所定义的变量, $P_{r, k+1}^{i, j}$ 递推公式为:
$ P_{r, k+1}^{i, j}=\nonumber\\ \left\{ {\begin{array}{l} ({{{\tilde{g}}}_{k}}-\bar{g}_{k}^{2}){{{\hat{A}}}_{k}}{{X}_{k, k}}{{{\hat{A}}}_{k}}^{{\rm T}}+{{W}_{k}}+R_{k+1, k+1}^{i, j}-\nonumber\\ \quad R_{x, k+1, k}^{i}{{A}_{\bar{g}, k}}^{{\rm T}}+\hat{R}_{x, k+1, k}^{i, j}{{A}_{\bar{g}, k}}^{{\rm T}}-\nonumber\\ \quad p_{L, n, k+1}^{j}\hat{R}_{x, k+1, k}^{i, j}{{A}_{\bar{g}, k}}^{{\rm T}}-{{A}_{\bar{g}, k}}\hat{R}{{_{x, k+1, k}^{j, i}}^{{\rm T}}} +\nonumber\\ \quad {{A}_{\bar{g}, k}}P_{r, k}^{i, j}{{A}_{\bar{g}, k}}^{{\rm T}}+p_{L, n, k+1}^{j}{{A}_{\bar{g}, k}}\hat{X}_{r, k, k}^{j}{{A}_{\bar{g}, k}}^{{\rm T}}-\nonumber\\ \quad p_{L, n, k+1}^{j}{{A}_{\bar{g}, k}}X_{r, k, k}^{i, j}{{A}_{\bar{g}, k}}^{{\rm T}}-p_{L, m, k+1}^{i}{{A}_{\bar{g}, k}} \times\nonumber\\ \quad \hat{R}{{_{x, k+1, k}^{j, i}}^{{\rm T}}}+p_{L, m, k+1}^{i}{{A}_{\bar{g}, k}}X_{r, k, k}^{i, j}{{A}_{\bar{g}, k}}^{{\rm T}}-\nonumber\\ \quad p_{L, m, k+1}^{i}{{A}_{\bar{g}, k}}\hat{X}{{_{r, k, k}^{i}}^{{\rm T}}}{{A}_{\bar{g}, k}}^{{\rm T}} +\nonumber\\ \quad p_{L, m, k+1}^{i}p_{L, n, k+1}^{j}{{A}_{\bar{g}, k}}X_{r, k, k}^{i, j}{{A}_{\bar{g}, k}}^{{\rm T}}, ~~~~~~~~i\ne j\nonumber\\[4mm] ({{{\tilde{g}}}_{k}}-\bar{g}_{k}^{2}){{{\hat{A}}}_{k}}{{X}_{k, k}}{{{\hat{A}}}_{k}}^{{\rm T}}+{{W}_{k}}+R_{k+1, k+1}^{i, i}-\nonumber\\ \quad R_{x, k+1, k}^{i}{{A}_{\bar{g}, k}}^{{\rm T}}+\hat{R}_{x, k+1, k}^{i, i}{{A}_{\bar{g}, k}}^{{\rm T}}-\nonumber\\ \quad p_{L, m, k+1}^{i}\hat{R}_{x, k+1, k}^{i, i}{{A}_{\bar{g}, k}}^{{\rm T}}-{{A}_{\bar{g}, k}}\hat{R}{{_{x, k+1, k}^{i, i}}^{{\rm T}}} +\nonumber\\ \quad {{A}_{\bar{g}, k}}P_{r, k}^{i, i}{{A}_{\bar{g}, k}}^{{\rm T}}+p_{L, m, k+1}^{i}{{A}_{\bar{g}, k}}\hat{X}_{r, k, k}^{i}{{A}_{\bar{g}, k}}^{{\rm T}}-\nonumber\\ \quad p_{L, m, k+1}^{i}{{A}_{\bar{g}, k}}\hat{R}{{_{x, k+1, k}^{i, i}}^{{\rm T}}}-\nonumber\\ \quad p_{L, m, k+1}^{i}{{A}_{\bar{g}, k}}\hat{X}{{_{r, k, k}^{i}}^{{\rm T}}}{{A}_{\bar{g}, k}}^{{\rm T}} +\nonumber\\ \quad p_{L, m, k+1}^{i}{{A}_{\bar{g}, k}}X_{r, k, k}^{i, i}{{A}_{\bar{g}, k}}^{{\rm T}}, ~~~~~~~~~~~~~~~~~~~~~~i=j \end{array}} \right. $
(46) 证明.由式(1)和式(8)可得:
$ \tilde{{\pmb{\textbf{x}}}}_{r, k+1}^{i}={{\pmb{\textbf{x}}}_{k+1}}-\hat{\pmb{\textbf{x}}}_{r, k+1}^{i}=\nonumber\\ {{A}_{g, k}}{{\pmb{\textbf{x}}}_{k}}+{{\pmb{\textbf{w}}}_{k}}-\pmb{\textbf{r}}_{k+1}^{i}-{{A}_{\bar{g}, k}}\hat{\pmb{\textbf{x}}}_{r, k}^{i}+\Phi _{m, k+1}^{i}{{A}_{\bar{g}, k}}\hat{\pmb{\textbf{x}}}_{r, k}^{i}=\nonumber\\ ({{A}_{g, k}}-{{A}_{\bar{g}, k}}){{\pmb{\textbf{x}}}_{k}}-\pmb{\textbf{r}}_{k+1}^{i}+{{A}_{\bar{g}, k}}\tilde{\pmb{\textbf{x}}}_{r, k}^{i} +\nonumber\\ \Phi _{m, k+1}^{i}{{A}_{\bar{g}, k}}\hat{\pmb{\textbf{x}}}_{r, k}^{i}+{{\pmb{\textbf{w}}}_{k}} $
(47) 则可得:
1) 当 $i\ne j$ 时,
$ P_{r, k+1}^{i, j}=\nonumber\\ {\rm E}\{\tilde{\pmb{\textbf{x}}}_{\pmb{\textbf{r}}, k+1}^{i}\tilde{\pmb{\textbf{x}}}{{_{r, k+1}^{j}}^{{\rm T}}}\}=\nonumber\\ {\rm E}\{[({{A}_{g, k}}-{{A}_{\bar{g}, k}}){{\pmb{\textbf{x}}}_{k}}-\pmb{\textbf{r}}_{k+1}^{i}+{{A}_{\bar{g}, k}}\tilde{\pmb{\textbf{x}}}_{r, k}^{i} +\nonumber\\ \Phi _{m, k+1}^{i}{{A}_{\bar{g}, k}}\hat{\pmb{\textbf{x}}}_{r, k}^{i}+{{\pmb{\textbf{w}}}_{k}}][({{A}_{g, k}}-{{A}_{\bar{g}, k}}){{\pmb{\textbf{x}}}_{k}}-\nonumber\\ {\textbf{r}}_{k+1}^{j}+{{A}_{\bar{g}, k}}\tilde{\pmb{\textbf{x}}}_{r, k}^{j}+\Phi _{n, k+1}^{j}{{A}_{\bar{g}, k}}\hat{\pmb{\textbf{x}}}_{r, k}^{j}+{{\pmb{\textbf{w}}}_{k}}{{]}^{{\rm T}}}\}=\nonumber\\ ({{{\tilde{g}}}_{k}}-\bar{g}_{k}^{2}){{{\hat{A}}}_{k}}{{X}_{k, k}}{{{\hat{A}}}_{k}}^{{\rm T}}+{{W}_{k}}+{\rm E}\{\pmb{\textbf{r}}_{k+1}^{i}\pmb{\textbf{r}}{{_{k+1}^{j}}^{{\rm T}}}\}-\nonumber\\ {\rm E}\{\pmb{\textbf{r}}_{k+1}^{i}\tilde{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}{{A}_{\bar{g}, k}}^{{\rm T}}-{{A}_{\bar{g}, k}}{\rm E}\{\tilde{\pmb{\textbf{x}}}_{r, k}^{i}\pmb{\textbf{r}}{{_{k+1}^{j}}^{{\rm T}}}\}-\nonumber\\ {\rm E}\{\Phi _{n, k+1}^{j}\}{\rm E}\{\pmb{\textbf{r}}_{k+1}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}{{A}_{\bar{g}, k}}^{{\rm T}}+{{A}_{\bar{g}, k}}\times\nonumber\\ {\rm E}\{\tilde{\pmb{\textbf{x}}}_{r, k}^{i}\tilde{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}{{A}_{\bar{g}, k}}^{{\rm T}}+{{A}_{\bar{g}, k}}{\rm E}\{\Phi _{n, k+1}^{j}\} \times\nonumber\\ {\rm E}\{\tilde{\pmb{\textbf{x}}}_{r, k}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}{{A}_{\bar{g}, k}}^{{\rm T}}-{{A}_{\bar{g}, k}}{\rm E}\{\Phi _{m, k+1}^{i}\} \times \nonumber\\ {\rm E}\{\tilde{\pmb{\textbf{x}}}_{r, k}^{i}\pmb{\textbf{r}}{{_{k+1}^{j}}^{{\rm T}}}\}+{{A}_{\bar{g}, k}}{\rm E}\{\Phi _{m, k+1}^{i}\}\times \nonumber\\ {\rm E}\{\hat{\pmb{\textbf{x}}}_{r, k}^{i}\tilde{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}{{A}_{\bar{g}, k}}^{{\rm T}}+{{A}_{\bar{g}, k}}{\rm E}\{\Phi _{m, k+1}^{i}\Phi _{n, k+1}^{j}\} \times \nonumber\\ {\rm E}\{\hat{\pmb{\textbf{x}}}_{r, k}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}{{A}_{\bar{g}, k}}^{{\rm T}}\nonumber\\ $
(48) 2) 当 $i=j$ 时,
$ P_{r, k+1}^{i, j}=\nonumber\\ ({{{\tilde{g}}}_{k}}-\bar{g}_{k}^{2}){{{\hat{A}}}_{k}}{{X}_{k, k}}{{{\hat{A}}}_{k}}^{{\rm T}}+{{W}_{k}}+{\rm E}\{\pmb{\textbf{r}}_{k+1}^{i}\pmb{\textbf{r}}{{_{k+1}^{i}}^{{\rm T}}}\}-\nonumber\\ {\rm E}\{\pmb{\textbf{r}}_{k+1}^{i}\tilde{\pmb{\textbf{x}}}{{_{r, k}^{i}}^{{\rm T}}}\}{{A}_{\bar{g}, k}}^{{\rm T}}-{\rm E}\{\Phi _{m, k+1}^{i}\}{\rm E}\{\pmb{\textbf{r}}_{k+1}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{i}}^{{\rm T}}}\} \times \nonumber\\ {{A}_{\bar{g}, k}}^{{\rm T}}-{{A}_{\bar{g}, k}}{\rm E}\{\tilde{\pmb{\textbf{x}}}_{r, k}^{i}\pmb{\textbf{r}}{{_{k+1}^{i}}^{{\rm T}}}\}+{{A}_{\bar{g}, k}}{\rm E}\{\tilde{\pmb{\textbf{x}}}_{r, k}^{i}\tilde{\pmb{\textbf{x}}}{{_{r, k}^{i}}^{{\rm T}}}\} \times\nonumber\\ {{A}_{\bar{g}, k}}^{{\rm T}}+{{A}_{\bar{g}, k}}{\rm E}\{\Phi _{m, k+1}^{i}\}{\rm E}\{\tilde{\pmb{\textbf{x}}}_{r, k}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{i}}^{{\rm T}}}\}{{A}_{\bar{g}, k}}^{{\rm T}}-\nonumber\\ {{A}_{\bar{g}, k}}{\rm E}\{\Phi _{m, k+1}^{i}\}{\rm E}\{\tilde{\pmb{\textbf{x}}}_{r, k}^{i}\pmb{\textbf{r}}{{_{k+1}^{i}}^{{\rm T}}}\}+{{A}_{\bar{g}, k}}{\rm E}\{\Phi _{m, k+1}^{i}\} \times \nonumber\\ {\rm E}\{\hat{\pmb{\textbf{x}}}_{r, k}^{i}\tilde{\pmb{\textbf{x}}}{{_{r, k}^{i}}^{{\rm T}}}\}{{A}_{\bar{g}, k}}^{{\rm T}}+{{A}_{\bar{g}, k}}{\rm E}\{\Phi _{m, k+1}^{i}\} \times \nonumber\\ {\rm E}\{\hat{\pmb{\textbf{x}}}_{r, k}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{i}}^{{\rm T}}}\}{{A}_{\bar{g}, k}}^{{\rm T}} $
(49) 利用式(36)对式(48)和式(49)中各量进行变量代换, 即得到式(46).
设 $\hat{\pmb{\textbf{x}}}_{r, k}^{o}$ 为分布式融合估计值, 融合估计误差协方差为 $P_{r, k}^{o}={\rm E}\{({{\pmb{\textbf{x}}}_{k}}-\hat{\pmb{\textbf{x}}}_{r, k}^{o}){{({{\pmb{\textbf{x}}}_{k}}-\hat{\pmb{\textbf{x}}}_{r, k}^{o})}^{{\rm T}}}\}$ .
根据最优线性无偏估计方法, 基于所设计的局部滤波增益(10)及相应融合中心端的 $N$ 个局部重组状态估计 $\hat{\pmb{\textbf{x}}}_{r, k}^{i}$ , 由式(5)和式(6), 可得到分布式融合估计器的形式如下:
$ \hat{\pmb{\textbf{x}}}_{r, k}^{o}={{(I_{o}^{{\rm T}}P_{r, k}^{-1}{{I}_{o}})}^{-1}}{{I}_{o}^{{\rm T}}}P_{r, k}^{-1}{{\pmb{\textbf{z}}}_{r, k}} $
(50) $ P_{r, k}^{o}={{(I_{o}^{{\rm T}}P_{r, k}^{-1}{{I}_{o}})}^{-1}} $
(51) 其中, ${{\pmb{\textbf{z}}}_{r, k}}:=col_i(\hat{\pmb{\textbf{x}}}_{r, k}^{i})$ , , $P_{r, k}^{i, j}$ 和 $P_{r, k}^{i, i}$ 按照式(46)计算.
4. 算例仿真
考虑如下由2个传感器组成的线性时变离散随机系统:
$ {{\pmb{\textbf{x}}}_{k+1}}=({{A}_{k}}+{{g}_{k}}{{\hat{A}}_{k}}){{\pmb{\textbf{x}}}_{k}}+{{\pmb{\textbf{w}}}_{k}} $
$ \pmb{\textbf{y}}_{k}^{i}=f_{k}^{i}C_{k}^{i}{{\pmb{\textbf{x}}}_{k}}+\pmb{\textbf{v}}_{k}^{i}, ~i=1, 2 $
其中, , , , , ${{q}_{k}}$ 、 $\pmb{\textbf{v}}_{k}^{1}$ 和 $\pmb{\textbf{v}}_{k}^{2}$ 为互不相关的零均值白噪声, 其协方差分别为1、0.25和0.25.设最大时延为 $L=3$ , $p_{0, k}^{i}=0.4$ , $p_{1, k}^{i}=0.3$ , $p_{2, k}^{i}=0.2$ , $p_{3, k}^{i}=0.05$ $(i=1, 2)$ .乘性噪声 ${{g}_{k}}$ 在区间 $[-0.1, 0.1]$ 上服从均匀分布, 系统初值 ${{\pmb{\textbf{x}}}_{0}}$ 的两个分量由在区间[-1, 1]上服从均匀分布, 且, $\hat{\pmb{\textbf{x}}}_{r, k}^{o}=\hat{\pmb{\textbf{x}}}_{k}^{1}=\hat{\pmb{\textbf{x}}}_{k}^{2}={{\hat{\pmb{\textbf{x}}}}_{0}}$ , .传感器增益退化系数 $f_{k}^{1}$ 和 $f_{k}^{2}$ 均在区间 $[0.6, 0.8]$ 上服从均匀分布. , .根据式(46)和(50)求得分布式融合估计值 $\hat{\pmb{\textbf{x}}}_{r, k}^{o}$ .
分布式融合估计值 $\hat{\pmb{\textbf{x}}}_{r, k}^{o}$ 的仿真结果如图 2所示, 四条曲线分别表示真实状态 ${{\pmb{\textbf{x}}}_{k}}$ 、通道1的局部最优估计 $\hat{\pmb{\textbf{x}}}_{k}^{1}$ 、通道2的局部最优估计 $\hat{\pmb{\textbf{x}}}_{k}^{2}$ 和分布式融合估计 $\hat{\pmb{\textbf{x}}}_{r, k}^{o}$ .图 3表示各时刻随机时延依概率的取值情况, 其中, $m=0$ 、 $m=1$ 、 $m=2$ 和 $m=3$ 依次表示时延为0、1、2、3, $m=4$ 表示数据丢包.图 4表示, 当传感器增益退化系数 $f_{k}^{i}$ 分别在区间 $Df=[0.6, 0.8]$ 、 $Df=[0.3, 0.5]$ 和 $Df=[0.1, 0.3]$ 上服从均匀分布时, 分布式融合估计误差协方差矩阵 $P_{r, k}^{o}$ 的迹 $\text{tr}(P_{r, k}^{o})$ 的计算结果, 由图 4可知, 在达到平稳时, $\text{tr}(P_{r, k}^{o})$ 随着增益退化系数 $f_{k}^{i}$ 取值的减小而增大, 这说明传感器增益退化越严重, 分布式融合估计误差越大.图 5表示, 当乘性噪声 ${{g}_{k}}$ 分别在 $Dg=[-0.1, 0.1]$ 、 $Dg=[-0.3, 0.3]$ 和 $Dg=[-0.5, 0.5]$ 上服从均匀分布时, $\text{tr}(P_{r, k}^{o})$ 的计算结果, 由图 5可知, 随着 ${{g}_{k}}$ 绝对值的增大, $\text{tr}(P_{r, k}^{o})$ 趋于稳定所用的时间越久, 在达到平稳时, $\text{tr}(P_{r, k}^{o})$ 则随着 ${{g}_{k}}$ 绝对值的增大而增大, 这说明模型不确定性越大, 分布式融合估计误差越大.
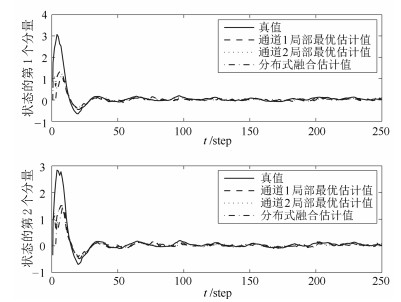 图 2 状态 ${{\pmb{\textbf{x}}}_{k}}$ 和状态估计 $\hat{\pmb{\textbf{x}}}_{r, k}^{o}$ 的轨迹Fig. 2 Trajectories of state ${{\pmb{\textbf{x}}}_{k}}$ and state estimate $\hat{\pmb{\textbf{x}}}_{r, k}^{o}$
图 2 状态 ${{\pmb{\textbf{x}}}_{k}}$ 和状态估计 $\hat{\pmb{\textbf{x}}}_{r, k}^{o}$ 的轨迹Fig. 2 Trajectories of state ${{\pmb{\textbf{x}}}_{k}}$ and state estimate $\hat{\pmb{\textbf{x}}}_{r, k}^{o}$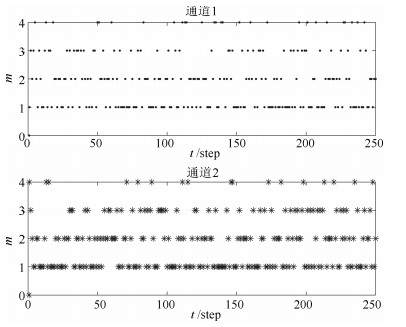 图 3 各时刻随机时延 $m$ 依概率的分布Fig. 3 Distribution of the random time delay $m$ based on probability every step
图 3 各时刻随机时延 $m$ 依概率的分布Fig. 3 Distribution of the random time delay $m$ based on probability every step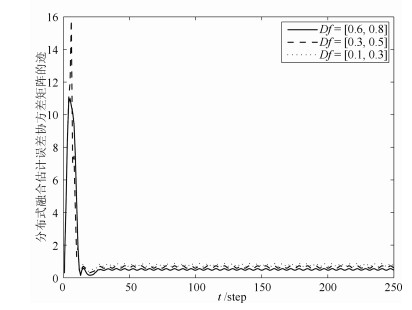 图 4 增益退化系数 $f_{k}^{i}$ 与 $\text{tr}(P_{r, k}^{o})$ 的关系Fig. 4 Relationship between gain degradation coefficient $f_{k}^{i}$ and $\text{tr}(P_{r, k}^{o})$
图 4 增益退化系数 $f_{k}^{i}$ 与 $\text{tr}(P_{r, k}^{o})$ 的关系Fig. 4 Relationship between gain degradation coefficient $f_{k}^{i}$ and $\text{tr}(P_{r, k}^{o})$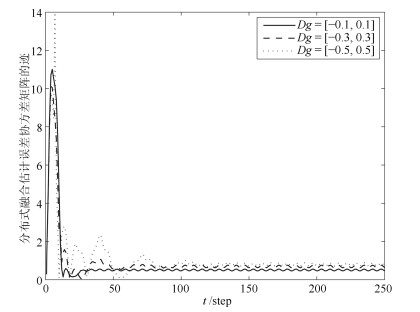 图 5 乘性噪声 ${{g}_{k}}$ 与 $\text{tr}(P_{r, k}^{o})$ 的关系Fig. 5 Relationship between multiplicative noise ${{g}_{k}}$ and $\text{tr}(P_{r, k}^{o})$
图 5 乘性噪声 ${{g}_{k}}$ 与 $\text{tr}(P_{r, k}^{o})$ 的关系Fig. 5 Relationship between multiplicative noise ${{g}_{k}}$ and $\text{tr}(P_{r, k}^{o})$为比较本文所提出的分布式融合估计方法与文献[13]所提出的集中式融合方法下的估计性能, 设传感器增益退化系数 $f_{k}^{i}$ 在区间 $Df=[0.6, 0.8]$ 上服从均匀分布, 乘性噪声 ${{g}_{k}}$ 在区间 $Dg=[-0.1, 0.1]$ 上服从均匀分布, 分别计算出两种融合估计方法下的融合估计误差协方差矩阵的迹, 其仿真结果如图 6所示.由图 6可看出, 文献[13]中所提出的集中式融合估计方法的融合估计误差小于本文所提的分布式融合方法, 这是因为前者采用集中式框架, 在融合中心直接利用所有传感器的原始测量数据进行融合估计, 测量数据信息损失量最小, 后者首先利用各传感器测量数据进行局部最优估计, 然后再将局部最优估计发送到融合中心, 测量数据信息损失量大于集中式融合方法, 从而增大融合估计误差; 从图 5又可以看出, 两种方法的融合估计误差相差不大, 说明本文提出分布式融合结构相比于集中式融合估计, 虽然融合精度并不是最优, 但融合精度损失不大, 同时, 采用分布式计算方法, 能够避免高维矩阵计算, 降低了计算量.
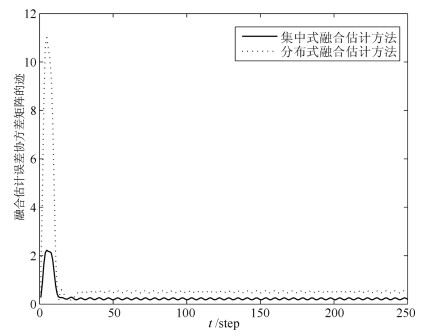 图 6 分布式融合估计方法与集中式融合估计方法对比Fig. 6 Comparison of decentralized fusion estimator with centralized fusion estimator
图 6 分布式融合估计方法与集中式融合估计方法对比Fig. 6 Comparison of decentralized fusion estimator with centralized fusion estimator5. 结论
本文考虑了具有传感器增益退化、模型不确定性、数据传输时延和丢包的多传感器分布式融合估计问题, 对模型的不确定性、传感器增益退化现象、随机时延和丢包现象依次进行建模.针对传感器增益退化和模型的不确定性, 设计了一种局部最优无偏估计器, 并在融合中心端建立符合存储规则的时延-丢包模型, 利用最优线性无偏估计方法, 推导出最小方差意义下的分布式融合估计器的递推形式.最后仿真结果表明, 传感器增益退化程度和模型不确定性越大, 系统融合估计精度越差.因此, 可通过改善传感器抗退化性能和减小模型不确定性, 来提高系统融合估计精度.相比于集中式融合估计, 本文所提方法能够有效降低计算量, 提高了系统容错能力和抗干扰性, 且工程上易于实现.
附录A 引理1的证明过程
证明.首先依次对第3节中式(27)~(31)进行推导, 即分5种情况进行讨论:
1) 当 $m=n$ 时, 有
$ {\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}\}=\Gamma _{m, m}^{i, j} $
(A1) 2) 当 $m-n=1$ 时, 有
$ {\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}\}=\nonumber\\ {\rm E}\{(L_{m-1}^{i}\pmb{\textbf{y}}_{m-1}^{i}+A_{\bar{g}, \bar{f}, m-1}^{i}\hat{\pmb{\textbf{x}}}_{m-1}^{i})\hat{\pmb{\textbf{x}}}{{_{m-1}^{j}}^{{\rm T}}}\}=\nonumber\\ L_{m-1}^{i}{\rm E}\{\pmb{\textbf{y}}_{m-1}^{i}\hat{\pmb{\textbf{x}}}{{_{m-1}^{j}}^{{\rm T}}}\}+A_{\bar{g}, \bar{f}, m-1}^{i}{\rm E}\{\hat{\pmb{\textbf{x}}}_{m-1}^{i}\hat{\pmb{\textbf{x}}}{{_{m-1}^{j}}^{{\rm T}}}\}=\nonumber\\ A_{\bar{g}, \bar{f}, m-1}^{i}\Gamma _{m-1, m-1}^{i, j}+\bar{f}_{m-1}^{i}L_{m-1}^{i}C_{m-1}^{i}\Lambda _{m-1, m-1}^{j} $
(A2) 3) 当 $m-n\ge 2$ 时, 令
$ \left\{ {\begin{array}{l} a_{m-1}^{i}:=L_{m-1}^{i} \\ b_{m-1}^{i}:=A_{\bar{g}, \bar{f}, m-1}^{i} \\ \end{array}} \right. $
(A3) 结合式(3)、(A3)得
$ \hat{\pmb{\textbf{x}}}_{m}^{i}=a_{m-1}^{i}\pmb{\textbf{y}}_{m-1}^{i}+b_{m-1}^{i}\hat{\pmb{\textbf{x}}}_{m-1}^{i}=\nonumber\\ a_{m-1}^{i}\pmb{\textbf{y}}_{m-1}^{i}+b_{m-1}^{i}(a_{m-2}^{i}\pmb{\textbf{y}}_{m-2}^{i}+b_{m-2}^{i}\hat{\pmb{\textbf{x}}}_{m-2}^{i})=\nonumber\\ a_{m-1}^{i}\pmb{\textbf{y}}_{m-1}^{i}+b_{m-1}^{i}a_{m-2}^{i}\pmb{\textbf{y}}_{m-2}^{i}+b_{m-1}^{i}b_{m-2}^{i}\times \nonumber\\ (a_{m-3}^{i}\pmb{\textbf{y}}_{m-2}^{i}+b_{m-3}^{i}\hat{\pmb{\textbf{x}}}_{m-3}^{i})=\nonumber\\ \begin{matrix} {} \begin{matrix} {} \begin{matrix} {} \vdots {} \end{matrix} {} \end{matrix} {} \end{matrix} \nonumber\\ a_{m-1}^{i}\pmb{\textbf{y}}_{m-1}^{i}+\sum\limits_{c=2}^{m-n}{[(\prod\limits_{d=1}^{c-1}{b_{m-d}^{i})a_{m-c}^{i}\pmb{\textbf{y}}_{m-c}^{i}}]}+\nonumber\\ (\prod\limits_{f=1}^{m-n}{b_{m-f}^{i})\hat{\pmb{\textbf{x}}}_{n}^{i}} $
(A4) 此时, 由式(A4)可得
$ {\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}\}=\nonumber\\ {\rm E}\{(a_{m-1}^{i}\pmb{\textbf{y}}_{m-1}^{i}+\sum\limits_{c=2}^{m-n}{[(\prod\limits_{d=1}^{c-1}{b_{m-d}^{i})a_{m-c}^{i}\pmb{\textbf{y}}_{m-c}^{i}}]} +\nonumber\\ (\prod\limits_{f=1}^{m-n}{b_{m-f}^{i})\hat{\pmb{\textbf{x}}}_{n}^{i}})\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}\}=\nonumber\\ a_{m-1}^{i}{\rm E}\{\pmb{\textbf{y}}_{m-1}^{i}\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}\}+{\rm E}\{(\prod\limits_{f=1}^{m-n}{b_{m-f}^{i})\hat{\pmb{\textbf{x}}}_{n}^{i}}\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}\} +\nonumber\\ {\rm E}\{\sum\limits_{c=2}^{m-n}{[(\prod\limits_{d=1}^{c-1}{b_{m-d}^{i})a_{m-c}^{i}\pmb{\textbf{y}}_{m-c}^{i}\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}}]}\}=\nonumber\\ a_{m-1}^{i}\bar{f}_{m-1}^{i}C_{m-1}^{i}(\prod\limits_{e=1}^{m-n-1}{{{A}_{\bar{g}, m-1-e}}})\Lambda _{n, n}^{j} +\nonumber\\ \sum\limits_{c=2}^{m-n}{[\bar{f}_{m-c}^{i}(\prod\limits_{d=1}^{c-1}{b_{m-d}^{i})}a_{m-c}^{i}C_{m-c}^{i}} \times \nonumber\\ (\prod\limits_{h=1}^{m-n-c}{{{A}_{\bar{g}, m-c-h}})\Lambda _{n, n}^{j}]}+(\prod\limits_{f=1}^{m-n}{b_{m-f}^{i}})\Gamma _{n, n}^{i, j} $
(A5) 4) 当 $n-m=1$ 时, 与式(28)推导过程同理, 可得
$ {\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}\}=\bar{f}_{n-1}^{j}\Lambda {{_{n-1, n-1}^{i}}^{{\rm T}}}L{{_{n-1}^{j}}^{{\rm T}}}C{{_{n-1}^{j}}^{{\rm T}}} +\nonumber\\ \Gamma _{n-1, n-1}^{i, j}A{{_{\bar{g}, \bar{f}, n-1}^{j}}^{{\rm T}}} $
(A6) 5) 当 $n-m\ge 2$ 时, 与式(29)推导过程同理, 可得
$ {\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}\}=\nonumber\\ \bar{f}_{n-1}^{j}\Lambda {{_{m, m}^{i}}^{{\rm T}}}{(\prod\limits_{e=1}^{n-m-1}{{{A}_{\bar{g}, n-1-e}}})^{{\rm T}}}C{{_{n-1}^{j}}^{{\rm T}}}a{{_{n-1}^{j}}^{{\rm T}}} +\nonumber\\ \sum\limits_{c=2}^{n-m}[\bar{f}_{n-c}^{j}\Lambda {{_{m, m}^{i}}^{{\rm T}}}(\prod\limits_{h=1}^{n-m-c}{{{A}_{\bar{g}, n-c-h}}})^{{\rm T}}C{{_{n-c}^{j}}^{{\rm T}}}a{{_{n-c}^{j}}^{{\rm T}}} \times \nonumber\\ {(\prod\limits_{d=1}^{c-1}{b_{n-d}^{j}})^{{\rm T}}}]+\Gamma _{m, m}^{i, j}(\prod\limits_{f=1}^{n-m}{b_{n-f}^{j}{{)}^{{\rm T}}}} $
(A7) 利用式(A3)对式(A5)和式(A7)进行变量代换, 并综合上述5种情况下讨论结果, 得到式(27)~(31).
下面对正文中式(32)~(35)进行推导, 即分4种情况进行讨论:
1) 当 $m=n$ 时, 有
$ {\rm E}\{\pmb{\textbf{x}}_{m}^{{}}\hat{\pmb{\textbf{x}}}{{_{n}^{i}}^{{\rm T}}}\}=\Lambda _{m, m}^{i} $
(A8) 2) 当 $m-n\ge 1$ 时, 有
$ {\rm E}\{{{\pmb{\textbf{x}}}_{m}}\hat{\pmb{\textbf{x}}}{{_{n}^{i}}^{{\rm T}}}\}=(\prod\limits_{\tau=1}^{m-n}{{{A}_{\bar{g}, m-1}}}){\rm E}\{{{\pmb{\textbf{x}}}_{n}}\hat{\pmb{\textbf{x}}}{{_{n}^{i}}^{{\rm T}}}\}=\nonumber\\ (\prod\limits_{\tau=1}^{m-n}{{{A}_{\bar{g}, m-1}}})\Lambda _{n, n}^{i} $
(A9) 3) 当 $n-m=1$ 时, 有
$ {\rm E}\{{{\pmb{\textbf{x}}}_{m}}\hat{\pmb{\textbf{x}}}{{_{n}^{i}}^{{\rm T}}}\}=\nonumber\\ {\rm E}\{{{\pmb{\textbf{x}}}_{n-1}}\pmb{\textbf{y}}{{_{n-1}^{i}}^{{\rm T}}}\}L{{_{n-1}^{i}}^{{\rm T}}}+{\rm E}\{{{\pmb{\textbf{x}}}_{n-1}}\pmb{\textbf{x}}{{_{n-1}^{i}}^{{\rm T}}}\}A{{_{\bar{g}, \bar{f}, n-1}^{i}}^{{\rm T}}}=\nonumber\\ H_{n-1, n-1}^{i}L{{_{n-1}^{i}}^{{\rm T}}}+\Lambda _{n-1, n-1}^{i}A{{_{\bar{g}, \bar{f}, n-1}^{i}}^{{\rm T}}} $
(A10) 4) 当 $n-m\ge 2$ 时, 令
$ \left\{ \begin{array}{*{35}{l}} a_{n-f}^{i}:=L_{n-f}^{i}\text{ } \\ b_{n-f}^{i}:=A_{\bar{g}, \bar{f}, n-f}^{i} \\ \end{array} \right. $
(A11) 则由式(A4)推导过程可得
$ {\rm E}\{{{\pmb{\textbf{x}}}_{m}}\hat{\pmb{\textbf{x}}}{{_{n}^{j}}^{{\rm T}}}\}=\nonumber\\ \bar{f}_{n-1}^{i}{{X}_{m, m}}(\prod\limits_{e=1}^{n-m-1}{{{A}_{\bar{g}, n-1-e}}})^{\rm T}C{{_{n-1}^{i}}^{{\rm T}}}a{{_{n-1}^{i}}^{{\rm T}}} +\nonumber\\ \sum\limits_{c=2}^{n-m}{[\bar{f}_{n-c}^{i}{{X}_{m, m}}(\prod\limits_{h=1}^{n-m-c}{{{A}_{\bar{g}, n-c-h}}{{)}}^{{\rm T}}C{{_{n-c}^{i}}^{{\rm T}}}a{{_{n-c}^{i}}^{{\rm T}}}}} \times \nonumber\\ (\prod\limits_{d=1}^{c-1}{b_{n-d}^{i}})^{\rm T}]+\Lambda _{m, m}^{i}(\prod\limits_{f=1}^{n-m}{b_{n-f}^{i}{{)}^{{\rm T}}}} $
(A12) 利用式(A11)对式(A12)进行变量代换, 并综上4种情况所述, 得到式(32)~(35).
附录B 引理2的证明过程
证明.下面分别对第3节中式(37)~(45)依次进行推导.由式(36)中各变量定义可得到
$ R_{k+1, k+1}^{i, j}=\nonumber\\ {\rm E}\{\sum\limits_{m=0}^{L}{[\delta (\tau _{k+1}^{i}, m)(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }}}}) \times \nonumber\\ \hat{\pmb{\textbf{x}}}_{k+1-m}^{i}]\sum\limits_{n=0}^{L}{[\delta (\tau _{k+1}^{j}, n)(}\prod\limits_{s=1}^{n}{{{A}_{\bar{g}, k+1-s}}})\hat{\pmb{\textbf{x}}}_{k+1-n}^{j}{{]}^{{\rm T}}}\}=\nonumber\\[-10mm] \left\{ {\begin{array}{l} {\rm E}\{\sum\limits_{m=0}^{L}{\sum\limits_{n=0}^{L}{[\delta (\tau _{k+1}^{i}, m)\delta (\tau _{k+1}^{j}, n)(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }})}}} \times\nonumber\\ \hat{\pmb{\textbf{x}}}_{k+1-m}^{i}\hat{\pmb{\textbf{x}}}{{_{k+1-n}^{j}}^{{\rm T}}}(\prod\limits_{s=1}^{n}{{{A}_{\bar{g}, k+1-s}}})^{\rm T}]\}, ~~~~~~~~~~~~~~i\ne j \nonumber\\[4mm] {\rm E}\{\sum\limits_{m=0}^{L}{[\delta (\tau _{k+1}^{i}, m)(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }})\hat{\pmb{\textbf{x}}}_{k+1-m}^{i}}} \times\nonumber\\ \hat{\pmb{\textbf{x}}}{{_{k+1-m}^{i}}^{{\rm T}}}(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }}{{)}^{{\rm T}}}}]\}, ~~~~~~~~~~~~~~~~~~~~~~~~~i=j \end{array}} \right. $
(B1) $ \hat{R}_{\pmb{\textbf{x}}, k+1, k}^{i, j}=\nonumber\\ {\rm E}\{\sum\limits_{m=0}^{L}{[\delta (\tau _{k+1}^{i}, m)(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }}})\hat{\pmb{\textbf{x}}}_{k+1-m}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}]}\}=\nonumber\\ \sum\limits_{m=0}^{L}{[p_{m, k+1}^{j}}(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }}){\rm E}\{\hat{\pmb{\textbf{x}}}_{k+1-m}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}]}% \nonumber\\ $
(B2) $ R_{x, k+1, k}^{i}=\nonumber\\ {\rm E}\{\sum\limits_{m=0}^{L}{[\delta (\tau _{k+1}^{i}, m)(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }}})\hat{\pmb{\textbf{x}}}_{k+1-m}^{i}{{\pmb{\textbf{x}}}_{k}}^{{\rm T}}]}\}=\nonumber\\ \sum\limits_{m=0}^{L}{[p_{m, k+1}^{j}}(\prod\limits_{\tau=1}^{m}{{{A}_{\bar{g}, k+1-\tau }}){\rm E}\{\hat{\pmb{\textbf{x}}}_{k+1-m}^{i}{{\pmb{\textbf{x}}}_{k}}^{{\rm T}}\}}] $
(B3) $ X_{r, k, k}^{i, j}={\rm E}\{(\pmb{\textbf{r}}_{k}^{i}+\bar{\Phi }_{m, k}^{i}{{A}_{\bar{g}, k-1}}\hat{\pmb{\textbf{x}}}_{r, k-1}^{i})(\pmb{\textbf{r}}_{k}^{j}+\bar{\Phi }_{n, k}^{j}{{A}_{\bar{g}, k-1}} \times\nonumber\\\hat{\pmb{\textbf{x}}}_{r, k-1}^{j}{{)}^{{\rm T}}}\}=\nonumber \\ \left\{ {\begin{array}{l} {\rm E}\{\pmb{\textbf{r}}_{k}^{i}\pmb{\textbf{r}}{{_{k}^{j}}^{{\rm T}}}\}+\bar{p}_{L, m, k}^{i}{{A}_{\bar{g}, k-1}}{\rm E}\{\hat{\pmb{\textbf{x}}}_{r, k-1}^{i}\pmb{\textbf{r}}{{_{k}^{j}}^{{\rm T}}}\} +\nonumber\\ \bar{p}_{L, n, k}^{j}{\rm E}\{\pmb{\textbf{r}}_{k}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k-1}^{j}}^{{\rm T}}}\}{{A}_{\bar{g}, k-1}}^{{\rm T}}+\bar{p}_{L, m, k}^{i}\times\nonumber\\ \bar{p}_{L, n, k}^{j}{{A}_{\bar{g}, k-1}}{\rm E}\{\hat{\pmb{\textbf{x}}}_{r, k-1}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k-1}^{j}}^{{\rm T}}}\}{{A}_{\bar{g}, k-1}}^{\rm T}, ~~~~~~~~~~~~~i\ne j \nonumber\\[4mm] {\rm E}\{\pmb{\textbf{r}}_{k}^{i}\pmb{\textbf{r}}{{_{k}^{i}}^{{\rm T}}}\}+\bar{p}_{L, m, k}^{i}{{A}_{\bar{g}, k-1}}{\rm E}\{\hat{\pmb{\textbf{x}}}_{r, k-1}^{i}\pmb{\textbf{r}}{{_{k}^{i}}^{{\rm T}}}\} +\nonumber\\ \bar{p}_{L, m, k}^{i}{\rm E}\{\pmb{\textbf{r}}_{k}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k-1}^{i}}^{{\rm T}}}\}{{A}_{\bar{g}, k-1}}^{{\rm T}}+\bar{p}_{L, m, k}^{i} \times\nonumber\\ {{A}_{\bar{g}, k-1}}{\rm E}\{\hat{\pmb{\textbf{x}}}_{r, k-1}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k-1}^{i}}^{{\rm T}}}\}{{A}_{\bar{g}, k-1}}^{{\rm T}}, ~~~~~~~~~~~~~~~~~~~~~~~i=j \end{array}} \right. $
(B4) $ \hat{X}_{r, k, k}^{i}={\rm E}\{({{A}_{\bar{g}, k-1}}{{\pmb{\textbf{x}}}_{k-1}}+{{\pmb{\textbf{w}}}_{k-1}})(\pmb{\textbf{r}}_{k}^{i}+\bar{\Phi }_{m, k}^{i}{{A}_{\bar{g}, k-1}} \times \nonumber\\ \hat{\pmb{\textbf{x}}}_{r, k-1}^{i}{{)}^{{\rm T}}}\}=\nonumber\\ {{A}_{\bar{g}, k-1}}{\rm E}\{{{\pmb{\textbf{x}}}_{k-1}}\pmb{\textbf{r}}{{_{k}^{i}}^{{\rm T}}}\}+\bar{p}_{L, m, k}^{i}{{A}_{\bar{g}, k-1}} \times \nonumber\\ {\rm E}\{{{\pmb{\textbf{x}}}_{k-1}}\hat{\pmb{\textbf{x}}}{{_{r, k-1}^{i}}^{{\rm T}}}\}{{A}_{\bar{g}, k-1}}^{{\rm T}} $
(B5) 对于式(42)中 $\hat{X}_{r, k+1-m, k}^{i, j}$ , 分3种情况讨论:
1) 当 $m=0$ 时, 有
$ \hat{X}_{r, k+1-m, k}^{i, j}=\hat{X}_{r, k+1, k}^{i, j}=\nonumber\\ {\rm E}\{\hat{\pmb{\textbf{x}}}_{k+1}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}=\nonumber\\ {\rm E}\{(L_{k}^{i}\pmb{\textbf{y}}_{k}^{i}+A_{\bar{g}, \bar{f}, k}^{i}\hat{\pmb{\textbf{x}}}_{k}^{i})\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}=\nonumber\\ L_{k}^{i}{\rm E}\{\pmb{\textbf{y}}_{k}^{i}\pmb{\textbf{x}}{{_{r, k}^{j}}^{{\rm T}}}\}+A_{\bar{g}, \bar{f}, k}^{i}{\rm E}\{\hat{\pmb{\textbf{x}}}_{k}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\} $
(B6) 2) 当 $m=1$ 时, 有
$ \hat{X}_{r, k+1-m, k}^{i, j}=\hat{X}_{r, k, k}^{i, j}=\nonumber\\ {\rm E}\{\hat{\pmb{\textbf{x}}}_{k}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}=\nonumber\\ {\rm E}\{(L_{k-1}^{i}\pmb{\textbf{y}}_{k-1}^{i}+A_{\bar{g}, \bar{f}, k-1}^{i}\hat{\pmb{\textbf{x}}}_{k-1}^{i})\times \nonumber\\ {{(\pmb{\textbf{r}}_{k}^{j}+\bar{\Phi }_{n, k}^{j}{{A}_{\bar{g}, k-1}}\hat{\pmb{\textbf{x}}}_{r, k-1}^{j})}^{{\rm T}}}\}=\nonumber\\ L_{k-1}^{i}{\rm E}\{\pmb{\textbf{y}}_{k-1}^{i}\pmb{\textbf{r}}{{_{k}^{j}}^{{\rm T}}}\}+A_{\bar{g}, \bar{f}, k-1}^{i}{\rm E}\{\hat{\pmb{\textbf{x}}}_{k-1}^{i}\pmb{\textbf{r}}{{_{k}^{j}}^{{\rm T}}}\}+ \nonumber\\ \bar{p}_{L, n, k}^{j}L_{k-1}^{i}{\rm E}\{\pmb{\textbf{y}}_{k-1}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k-1}^{j}}^{{\rm T}}}\}{{A}_{\bar{g}, k-1}}^{{\rm T}}+ \nonumber\\ \bar{p}_{L, n, k}^{j}A_{\bar{g}, \bar{f}, k-1}^{i}{\rm E}\{\hat{\pmb{\textbf{x}}}_{k-1}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k-1}^{j}}^{{\rm T}}}\}{{A}_{\bar{g}, k-1}}^{{\rm T}} $
(B7) 3) 当 $m>1$ 时, 由式(8)得
$ \hat{\pmb{\textbf{x}}}_{r, k}^{j}=\pmb{\textbf{r}}_{k}^{j}+\bar{\Phi }_{n, k}^{j}{{A}_{\bar{g}, k-1}}\hat{\pmb{\textbf{x}}}_{r, k-1}^{j}=\nonumber\\ {\textbf{r}}_{k}^{j}+\bar{\Phi }_{n, k}^{j}{{A}_{\bar{g}, k-1}}(\pmb{\textbf{r}}_{k-1}^{j} +\nonumber\\ \bar{\Phi }_{n, k-1}^{j}{{A}_{\bar{g}, k-2}}\hat{\pmb{\textbf{x}}}_{r, k-2}^{j})=\nonumber\\ \begin{matrix} {} \begin{matrix} {} {} {} \begin{matrix} \vdots {} {} {} \end{matrix} \end{matrix} {} \end{matrix} \nonumber\\ {\textbf{r}}_{k}^{j}+\sum\limits_{\tau=1}^{m-1}{[(\prod\limits_{s=1}^{\tau }{\bar{\Phi }_{n, k+1-s}^{j}{{A}_{\bar{g}, k-s}}})\pmb{\textbf{r}}_{k-\tau }^{j}]}+\nonumber\\ (\prod\limits_{t=1}^{m-1}{\bar{\Phi }_{n, k+1-t}^{j}{{A}_{\bar{g}, k-t}})}\hat{\pmb{\textbf{x}}}_{r, k+1-m}^{j} $
(B8) 则有
$ \hat{X}_{r, k+1-m, k}^{i, j}=\nonumber\\ {\rm E}\{\hat{\pmb{\textbf{x}}}_{k+1-m}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\}=\nonumber\\ \sum\limits_{\tau=1}^{m-1}{[{\rm E}\{\hat{\pmb{\textbf{x}}}_{k+1-m}^{i}\pmb{\textbf{r}}{{_{k-\tau }^{j}}^{{\rm T}}}\}{\rm E}\{(\prod\limits_{s=1}^{\tau }{\bar{\Phi }_{n, k+1-s}^{j}{{A}_{\bar{g}, k-s}}{{)}^{{\rm T}}}}\}} +\nonumber\\ {\rm E}\{\hat{\pmb{\textbf{x}}}_{k+1-m}^{i}\hat{\pmb{\textbf{x}}}{{_{r, k+1-m}^{j}}^{{\rm T}}}\}{\rm E}\{(\prod\limits_{t=1}^{m-1}{\bar{\Phi }_{n, k+1-t}^{j}{{A}_{\bar{g}, k-t}}{{)}^{{\rm T}}}}\} +\nonumber\\ {\rm E}\{\hat{\pmb{\textbf{x}}}_{k+1-m}^{i}\pmb{\textbf{r}}{{_{k}^{j}}^{{\rm T}}}\} $
(B9) $ Y_{r, k, k}^{i, j}=\bar{f}_{k}^{i}C_{k}^{i}{\rm E}\{{{\pmb{\textbf{x}}}_{k}}\hat{\pmb{\textbf{x}}}{{_{r, k}^{j}}^{{\rm T}}}\} $
(B10) $ R_{y, k, k+1}^{i, j}=\bar{f}_{k}^{i}C_{k}^{i}{\rm E}\{{{\pmb{\textbf{x}}}_{k}}\pmb{\textbf{r}}{{_{k+1}^{j}}^{{\rm T}}}\} $
(B11) $ \bar{X}_{r, m, n}^{i, j}={\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}{\{\sum\limits_{s=0}^{L}{[\delta (\tau _{n}^{j}, s)(\prod\limits_{\tau=1}^{s}{{{A}_{\bar{g}, n-\tau }}})\hat{\pmb{\textbf{x}}}_{n-s}^{j}]}\}^{{\rm T}}}\}=\nonumber\\ \sum\limits_{s=0}^{L}{[p_{s, n}^{i}{\rm E}\{\hat{\pmb{\textbf{x}}}_{m}^{i}\hat{\pmb{\textbf{x}}}{{_{n-s}^{j}}^{\rm T}}\}(\prod\limits_{\tau=1}^{s}{{{A}_{\bar{g}, n-\tau }}}}{{)}^{{\rm T}}}] $
(B12) 利用式(36)对式(B1)~(B7)、式(B9)~(B12)中各量进行变量代换, 即分别得到式(37)~(45).
-
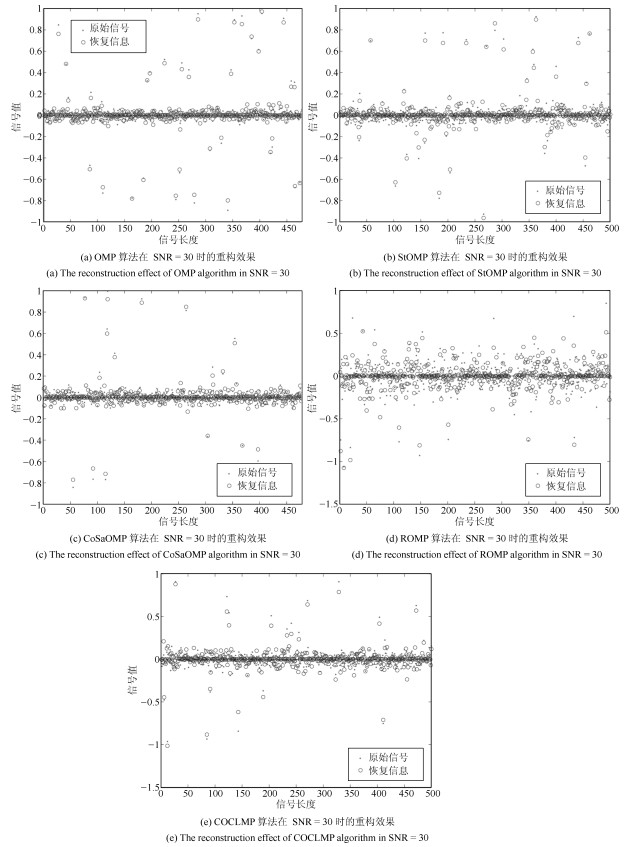
图 1 OMP、StOMP、CoSaOMP、ROMP和COCLMP在噪声干扰下对稀疏信号的重构效果
Fig. 1 Reconstruction effect of sparse signals include noise for OMP, StOMP, CoSaOMP, ROMP, COCLMP

图 2 噪声干扰的不同采样次数下OMP、StOMP、CoSaOMP、ROMP、COCLMP算法重构结果
Fig. 2 Reconstruction result include noise under different sampling number for OMP, StOMP, CoSaOMP, ROMP, COCLMP

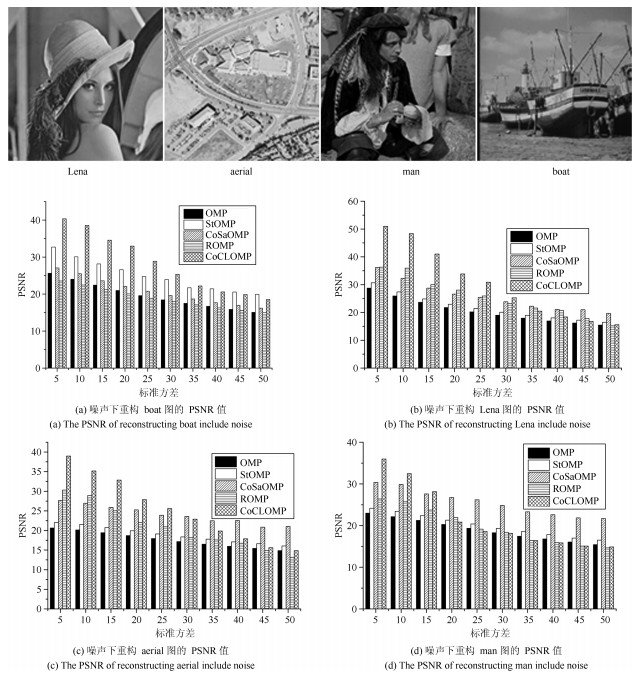
图 3 噪声干扰下OMP、StOMP、CoSaOMP、ROMP、COCLMP算法对图像的重构效果
Fig. 3 Image reconstruction effect include noise for OMP, StOMP, CoSaOMP, ROMP, COCLMP
-
[1] Moshtaghpour A, Jacques L, Cambareri V, Degraux K, De Vleeschouwer C. Consistent basis pursuit for signal and matrix estimates in quantized compressed sensing. IEEE Signal Processing Letters, 2016, 23(1):25-29 doi: 10.1109/LSP.2015.2497543 [2] Zhao W Q, Beach T H, Rezgui Y. Efficient least angle regression for identification of linear-in-the-parameters models. Proceedings of the Royal Society A:Mathematical, Physical and Engineering Sciences, 2017, 473(2198):Article No.20160775 doi: 10.1098/rspa.2016.0775 [3] Lee H C, Song B, Kim J S, Jung J J, Li H H, Mutic S, et al. An efficient iterative CBCT reconstruction approach using gradient projection sparse reconstruction algorithm. Oncotarget, 2016, 7(52):87342-87350 http://europepmc.org/abstract/MED/27894103 [4] 许志强.压缩感知.中国科学:数学, 2012, 42(9):865-877 https://www.wenkuxiazai.com/doc/3851fb1eff00bed5b9f31d8b.htmlXu Zhi-Qiang. Compressed sensing:a survey. Science China:Mathematics, 2012, 42(9):865-877 https://www.wenkuxiazai.com/doc/3851fb1eff00bed5b9f31d8b.html [5] 方红, 杨海蓉.贪婪算法与压缩感知理论.自动化学报, 2011, 37(12):1413-1421 http://www.aas.net.cn/CN/abstract/abstract17639.shtmlFang Hong, Yang Hai-Rong. Greedy algorithms and compressed sensing. Acta Automatica Sinica, 2011, 37(12):1413-1421 http://www.aas.net.cn/CN/abstract/abstract17639.shtml [6] Cohen A, Dahmen W, DeVore R. Orthogonal matching pursuit under the restricted isometry property. Constructive Approximation, 2017, 45(1):113-127 doi: 10.1007/s00365-016-9338-2 [7] Do T T, Gan L, Nguyen N, Tran T D. Sparsity adaptive matching pursuit algorithm for practical compressed sensing. In: Proceedings of the 42th Asilomar Conference on Signals, Systems and Computers. Pacific Grove, CA, USA: IEEE, 2008. 581-587 [8] Needell D, Vershynin R. Signal recovery from incomplete and inaccurate measurements via regularized orthogonal matching pursuit. IEEE Journal of Selected Topics in Signal Processing, 2010, 4(2):310-316 doi: 10.1109/JSTSP.2010.2042412 [9] Lee D. MIMO OFDM channel estimation via block stagewise orthogonal matching pursuit. IEEE Communications Letters, 2016, 20(10):2115-2118 doi: 10.1109/LCOMM.2016.2594059 [10] Davenport M A, Needell D, Wakin M B. Signal space CoSaMP for sparse recovery with redundant dictionaries. IEEE Transactions on Information Theory, 2013, 59(10):6820-6829 doi: 10.1109/TIT.2013.2273491 [11] Giryes R, Elad M. RIP-based near-oracle performance guarantees for SP, CoSaMP, and IHT. IEEE Transactions on Signal Processing, 2012, 60(3):1465-1468 doi: 10.1109/TSP.2011.2174985 [12] Ramirez-Giraldo J C, Trzasko J, Leng S, Yu L, Manduca A, McCollough C H. Nonconvex prior image constrained compressed sensing (NCPICCS):theory and simulations on perfusion CT. Medical Physics, 2011, 38(4):2157-2167 doi: 10.1118/1.3560878 [13] Babaie-Kafaki S, Ghanbari R. A hybridization of the Hestenes-Stiefel and Dai-Yuan conjugate gradient methods based on a least-squares approach. Optimization Methods and Software, 2015, 30(4):673-681 doi: 10.1080/10556788.2014.966825 [14] Shaw C B, Prakash J, Pramanik M, Yalavarthy P K. Least squares QR-based decomposition provides an efficient way of computing optimal regularization parameter in photoacoustic tomography. Journal of Biomedical Optics, 2013, 18(8):Article No.80501 doi: 10.1117/1.JBO.18.8.080501 [15] Paige C C, S M A. LSQR:an algorithm for sparse linear equations and sparse least squares. ACM Transactions on Mathematical Software, 1982, 8(1):43-71 doi: 10.1145/355984.355989 [16] Cichocki A, Zdunek R, Amari S I. Csiszár's divergences for non-negative matrix factorization: family of new algorithms. In: Proceedings of the 2006 International Conference on Independent Component Analysis and Blind Signal Separation. Charleston, SC, USA: Springer, 2006. 32-39 [17] Cichocki A, Amari S I. Families of Alpha-Beta-and Gamma-divergences:flexible and robust measures of similarities. Entropy, 2010, 12(6):1532-1568 doi: 10.3390/e12061532 [18] 余南南, 邱天爽.压缩传感条件下红外和可见光图像融合技术的研究.信号处理, 2012, 28(5):692-698 http://cdmd.cnki.com.cn/Article/CDMD-10183-2008126444.htmYu Nan-Nan, Qiu Tian-Shuang. Fusion technology of infrared and visible images in compressive sensing. Signal Processing, 2012, 28(5):692-698 http://cdmd.cnki.com.cn/Article/CDMD-10183-2008126444.htm [19] 王琴, 沈远彤.基于压缩感知的多尺度最小二乘支持向量机.自动化学报, 2016, 42(4):631-640 http://www.aas.net.cn/CN/abstract/abstract18849.shtmlWang Qin, Shen Yuan-Tong. Multi-scale least squares support vector machine using compressive sensing. Acta Automatica Sinica, 2016, 42(4):631-640 http://www.aas.net.cn/CN/abstract/abstract18849.shtml 期刊类型引用(3)
1. 程帆,董宇欣. 基于力阻抗模型的上肢康复机器人交互控制系统设计. 计算机测量与控制. 2021(01): 111-114+125 .  百度学术
百度学术2. 陈威,陈新度. 基于模糊PID的汽车门框打磨机器人主动柔顺控制系统设计. 现代电子技术. 2021(10): 171-175 . 百度学术3. 刘作军,胡冬,庞爽,张燕. 基于自适应运动学模型的镜像型迭代学习控制. 制造业自动化. 2021(07): 29-33+52 . 百度学术其他类型引用(3)
-

 下载:
下载:
 下载:
下载:
计量
- 文章访问数: 2705
- HTML全文浏览量: 454
- PDF下载量: 706
- 被引次数: 6
