

-
摘要: 针对非线性不确定惯性串联系统的控制问题,提出了惯性串联型扩张状态观测器(Extended state observer,ESO),使其可直接对惯性串联系统的扩张状态进行估计,同时把被控对象的极点配置到期望位置,在此基础上提出了适合惯性串联系统的自抗扰控制(Active disturbance rejection control,ADRC)方法,该惯性串联型ADRC方法可以充分利用被控对象的已有知识.论文还给出了惯性串联型ADRC和基于扰动观测器(Disturbance observer,DOB)的控制方法之间的联系,指出它们具有相同的三自由度(three-degree of freedom control,3-DOF)控制系统结构和模块功能,都能实现对系统期望模型以外的总扰动进行估计和补偿.仿真结果表明,所提出的方法是有效的,惯性串联型ESO能实现系统总扰动的估计,惯性串联型ADRC能使系统输出能很好地跟踪系统参考输入.Abstract: For the control problem of nonlinear cascade inertia systems with uncertainties, an extended state observer (ESO) for cascade inertia systems is presented, which can directly estimate the extended state of the cascade inertia system and also arrange the poles of the controlled plant to the desired places. Based on this ESO, an active disturbance rejection control (ADRC) for cascade inertia systems is presented to take full advantage of the known knowledge of the controlled plant. This paper also gives the relationship of both ADRC for cascade inertia system and disturbance observer (DOB)-based control. The two control methods share the same control system architecture and modular functions of three-degree of freedom (3-DOF) and both can estimate and compensate the total disturbance excluding desired model. Simulation results verify the effectiveness of the proposed methods. ESO for cascade inertia systems can estimate the system's total disturbance and ADRC for cascade inertia systems can realize good performance of system output tracking the reference input.
-
实际应用中, 被控对象的精确数学模型很难获得, 致使现代控制理论的许多控制算法很难在实际中取得良好的控制效果, 实践中大量应用的还是不依赖于精确数学模型的PID控制方法.我国著名学者韩京清研究员在吸取PID控制的基于误差来消除误差的优点并克服其对信号利用率低的缺点的基础上提出了著名的自抗扰控制(Active disturbance rejection control, ADRC) [1-2].经过多年的发展, ADRC在理论研究和参数整定等方面取得了重要突破[3-21]. ADRC对被控对象的模型信息依赖很少, 只需要知道被控对象的相对阶和控制增益的粗略估计, 因此, 在实际中应用越来越多.
在具体操作时, ADRC先把被控对象化为积分串联系统, 然后应用扩张状态观测器(Extended state observer, ESO)估计出内扰和外扰的总和, 并加入控制量中实现补偿控制, 把非线性时变系统变成了线性系统, 最后对补偿后的系统进行反馈控制, 把闭环系统的极点配置到期望的位置.然而, 对任何实际的系统, 都采用这种先把被控对象化为积分串联系统的方法未必是最好的.例如, 如果实际系统是惯性串联系统, 强行把它化为积分串联系统后系统的状态将失去实际系统状态原有的物理意义, 是否可以保持惯性串联以便与实际过程有很好的对应关系, 而有利于实现控制系统故障诊断等其他功能, 这要求ESO能直接估计惯性串联系统的总扰动; 另一方面, 人们在长期系统操作过程中积累了丰富的系统模型知识, 这些知识如何在ADRC中充分利用以便更好地提高控制性能, 原有的积分串联模型很难集成这些知识.
本文研究了惯性串联系统的ESO和ADRC, 以及惯性串联系统ADRC与基于扰动观测器(Disturbance observer, DOB)的控制之间的联系.本文的结构安排如下:第1节是对所研究问题的描述; 第2节给出了惯性串联系统的ADRC方法, 及其与基于DOB控制的关系, 给出了相关定理及其证明; 第3节给出了仿真研究结果; 第4节是本文的结论.
1. 问题描述
考虑$n$阶非线性系统
$ (s + \sigma )^n y = f(y, y^{(1)}, \cdots, y^{(n - 1)}, t) + \\ b(y, y^{(1)}, \cdots, y^{(n - 1)}, t)u(t) $
(1) 其中, $s$为微分算子, $f$和$b$为未知有界非线性时变函数, $u$为系统的控制输入, $t$为时间, $n$为系统阶数.系统$(1)$为惯性串联系统, 并非是经典ADRC [1-4]所要求的积分串联型系统, 把式$(1)$转换为
$ y^{(n)} = f_1 + b(y, y^{(1)}, \cdots, y^{(n - 1)}, t)u(t) $
(2) 其中
$ f_1 = - \sum\limits_{i = 1}^n {{ {C}}_n^i \sigma ^i y^{(n - i)} } + f(y, y^{(1)}, \cdots, y^{(n - 1)}, t) $
(3) 则系统$(1)$转换为系统$(2)$的积分串联型系统, 针对式$(2)$, 按照经典的积分串联型ADRC方法, 定义系统状态变量
$ \begin{cases} x_1 = y \\ x_i = \dot x_{i - 1} = y^{(i - 2)}, \quad i = 2, \cdots, n \\ \end{cases} $
(4) 则系统$(2)$写成如下状态空间方程
$ \begin{cases} \dot x_i (t) = x_{i + 1} (t), \quad i = 1, \cdots, n - 1 \\ \dot x_n (t) = f_1 ({\pmb{x}}, t) + b({\pmb{x}}, t)u(t) \end{cases} $
(5) 其中, ${\pmb{x}}^{\rm{T}} = [{array}{*{20}c} {x_{\rm{1}} } & \cdots & {x_n } \\ {array}]$.
假设1. $f$和$b$对其自变量的一阶偏导数局部Lipschitz连续.
假设2. $b$的符号不变, 且有
$ \left| b \right| \ge b_{\min } > 0 $
(6) $b_0$是与$b$具有相同符号的粗略估计.由假设1和假设2, 系统$(5)$可以写成扩张状态方程形式
$ \begin{cases} \dot x_i (t) = x_{i + 1} (t), \quad i = 1, \cdots, n - 1 \\ \dot x_n (t) = x_{n + 1} (t) + b_0 u(t) \\ x_{n + 1} (t) = f({\pmb{x}}, t) + (b - b_0 )u(t) \\ \end{cases} $
(7) 其中, $ x_{n + 1} (t) = f({\pmb{x}}, t) + (b -b_0)u(t) $为系统的扩张状态(Extended state, ES).根据ADRC理论, 式$(7)$可以通过ESO对$x_{n + 1} (t)$进行估计和补偿, 实现自抗扰控制.假如采用线性ESO(8), 则有引理1.
$ \begin{cases} \dot {\hat x}_i (t) = \hat x_{i + 1} - a_i (\hat x_1 - x_1 ), \quad i = 1, \cdots, n - 1 \\ \qquad \vdots \\ \dot {\hat x}_n (t) = \hat x_{n + 1} - a_n (\hat x_1 - x_1 ) + b_0 u(t) \\ \dot {\hat x}_{n + 1} (t) = - a_{n + 1} (\hat x_1 - x_1 ) \\ \end{cases} $
(8) 引理1.系统$(7)$的线性ESO(8)中的系数$ a_i = \bar a_i /\varepsilon ^i $ $(i$ $=1, \cdots, n + 1)$, 其中, $ 0 < \varepsilon \le 1$, $\bar a_i$为Hurwitz多项式$ s^{n + 1}$ $ +$ $\bar \alpha _1 s^n + \cdots + \bar \alpha _n s + \bar \alpha _{n + 1} $的系数, 假设1和假设2成立, 则有如下结论:
1) 给定任意正数$t_\varepsilon$, 对于$ t \in {\rm{[}}t_\varepsilon, \infty {\rm{)}} $, 下式一致收敛.
$ \mathop {\lim }\limits_{\varepsilon \to 0} \left| {x_i (t)- \hat x_i (t)} \right| = 0 $
(9) 2) 系统$(7)$和系统$(8)$的解$ x_i$和$ \hat x_i $之差的上极限满足
$ \mathop {\overline {\lim } }\limits_{t \to \infty } \left| {x_i (t)- \hat x_i (t)} \right| \le o(\varepsilon ^{(n + 2- i)} ) $
(10) 引理1的证明和说明见文献[11]和文献[12], 引理1中$ {\pmb{\hat x}} $实现了对系统状态$ {\pmb{x}}$的估计, $ \hat x_{n + 1}$实现了对系统总扰动$x_{n + 1}$的估计.据此可以构造如图 1所示的ADRC系统结构.
图 1中, ADRC的关键在于通过ESO得到对系统总扰动估计的扩展状态$\hat x_{n + 1} $, 并加入到系统控制输入中补偿系统$(5)$得到一个近似线性积分串联标准型, 实现了系统$(5)$的动态补偿线性化, 在此基础上通过反馈控制$ u_f$实现补偿后的积分串联系统的极点配置, 从而保证闭环系统的性能要求, 最终系统的控制量为
$ u = u_f - \frac{{\hat x_{n + 1} }}{{b_0 }} $
(11) 由于系统$(1)$在实际中大量存在, 例如过程控制中三容过程, 在ADRC的应用中, 是否可以直接采用与实际系统更接近的惯性串联模型, 而不一定是积分串联模型呢?同样采用ADRC的动态补偿线性化思想, 但是线性化后得到的不是积分串联系统, 而是与实际系统更接近的惯性串联系统, 可以减少ESO的计算量, 更接近实际系统工作时的状态变量有明显的物理意义, 其估计值可以用于实际控制系统的故障诊断, 有利于提高整个控制系统的可靠性.
2. 惯性串联系统的ADRC
针对系统$(1)$, 重新定义系统的状态变量
$ \begin{cases} z_1 = y \\ z_i = (s + \sigma )z_{i - 1}, \quad i = 2, \cdots, n \end{cases} $
(12) 其中, $ -\sigma $为惯性环节的极点, 则式$(1)$可以化为如下的惯性串联系统
$ \begin{cases} \dot z_i (t) = - \sigma z_i (t) + z_{i + 1} (t), \quad i = 1, \cdots, n - 1 \\ \dot z_n (t) = -\sigma z_n (t) + z_{n + 1} {\rm{(}}t) + b_0 u(t) \\ z_{n + 1} (t) = f(z, t) + (b(z, t) - b_0 )u(t) \\ \end{cases} $
(13) 其中, $ {\pmb{z}}^{\rm{T}} = [{array}{*{20}c} {z_{\rm{1}} } & \cdots & {z_n } \\ {array}]$, $z_{n + 1} (t)$为系统的惯性串联型ES.对比式$(13)$和式$(5)$, 可以看出积分串联系统$(5)$是惯性串联系统$(13)$当$\sigma =0$的特殊情况, 仿照积分串联型ESO$(8)$可以构造式$(13)$的ESO为
$ \begin{cases} \dot {\hat z}_i (t) = -\sigma \hat z_i + \hat z_{i + 1} - \alpha _i (\hat z_1 - z_1 ), \quad i = 1, \cdots, n - 1 \\ \dot {\hat z}_n (t) = - \sigma \hat z_n + \hat z_{n + 1} - \alpha _n (\hat z_1 - z_1 ) + b_0 u(t) \\ \dot {\hat z}_{n + 1} (t) = - \sigma \hat z_{n + 1} - \alpha _{n + 1} (\hat z_1 - z_1 ) \end{cases} $
(14) 相对于积分串联型ESO, 式(14)是其推广, 是一种惯性串联型ESO.如果惯性串联型ESO同样具有经典积分串联型ESO对其扩张状态的估计的性质, 则系统(1)可以化为图 2所示的惯性串联模型.
从式$(1)$可以看出, 实际上$\sigma$可以取满足$\sigma \ge 0$的任意值, 与实际系统不同的部分可以移到方程的右端, 变成$f_1$一部分, 惯性串联型ESO在估计总扰动的同时, 实际上已经实现了部分极点配置功能, 因此, 图 2中的$P_d (s)$称为期望模型, 而不是标称模型(或名义模型).标称模型是尽可能近似被控系统的实际模型, 期望模型是尽可能达到控制系统性能指标而人为设计的理想模型.实际应用时, 可以根据闭环系统的性能指标来选择期望模型$P_d (s)$中的$\sigma$, 然后根据分离原理, 分别设计惯性串联型ESO和反馈控制器$K(s)$.
2.1 惯性串联系统ESO
对于惯性串联系统ESO有如下定理:
定理1.假设惯性串联型ESO系统(14)中的系数$ \alpha _i=$ $\bar \alpha _i /\varepsilon ^i $ $(i = 1, \cdots, n + 1)$, 其中, $ 0 < \varepsilon \le1$, $ \bar \alpha _i $为Hurwitz多项式$ s^{n + 1} + \bar \alpha _1 s^n + \cdots + \bar \alpha _n s + \bar \alpha _{n + 1} $的系数, 系统满足假设1\linebreak和假设2, 则有如下结论:
1) 给定任意正数$ t_\varepsilon $, 对于$ t \in {\rm{[}}t_\varepsilon, \infty {\rm{)}} $下式一致收敛.
$ \mathop {\lim }\limits_{\varepsilon \to 0} \left| {z_i (t)- \hat z_i (t)} \right| = 0 $
(15) 2) 系统$(13)$和系统$(14)$的解$ z_i$和$ \hat z_i $之差的上极限满足
$ \overline {\mathop {\lim }\limits_{{{t}} \to \infty } } \left| {z_i (t)- \hat z_i (t)} \right| \le o(\varepsilon ^{(n + 2- i)} ) $
(16) 其中, $ i = 1, \cdots, n + 1 $, $z_{n + 1} (t) = f + (b -b_0)u(t) $为系统(13)的扩张状态.
证明.根据式(4)和式(12)的两种状态变量的定义, 状态变量之间的关系为
$ \begin{cases} z_1 = x_1 = y \\ z_2 = { {C}}_1^0 \sigma x_1 + x_2 \\ z_3 = { {C}}_2^0 \sigma ^2 x_1 + { {C}}_2^1 \sigma x_2 + x_3 \\ \begin{array}{*{20}c} {} & \vdots & {} \\ \end{array} \\ z_n = { {C}}_{n - 1}^0 \sigma ^{n - 1} x_1 + \cdots + { {C}}_{n - 1}^{n - 2} \sigma x_{n - 1} + x_n \end{cases} $
(17) 式$(17)$写成向量和矩阵形式为
$ {\pmb{z}} = T{\pmb{x}} $
(18) 其中, $T$为可逆变换矩阵
$ T = \left[{\begin{array}{*{20}c} 1 & 0 & \cdots & 0 & 0 \\ {{ {C}}_1^0 \sigma ^1 } & 1 & \cdots & 0 & 0 \\ \vdots & \vdots & \ddots & \vdots & \vdots \\ {{ {C}}_{n-1}^0 \sigma ^{n-1} } & {{ {C}}_{n-1}^1 \sigma ^{n - 2} } & \cdots & {{ {C}}_{n - 1}^{n - 2} \sigma } & 1 \\ \end{array}} \right]_{n \times n} $
(19) 同理有
$ \begin{cases} \hat z_1 = \hat x_1 \\ \hat z_2 = \hat x_1 { {C}}_1^0 \sigma + \hat x_2 \\ \hat z_3 = \hat x_1 { {C}}_2^0 \sigma ^2 + \hat x_2 { {C}}_2^1 \sigma + \hat x_3 \\ \begin{array}{*{20}c} {} & \vdots & {} \\ \end{array} \\ \hat z_n = \hat x_1 { {C}}_{n - 1}^0 \sigma ^{n - 1} + \cdots + \hat x_{n - 1} { {C}}_{n - 1}^{n - 2} \sigma + \hat x_n \\ \hat z_{n + 1} = \hat x_1 { {C}}_n^0 \sigma ^n + \cdots + \hat x_n { {C}}_n^{n - 1} \sigma + \hat x_{n + 1} \\ \end{cases} $
(20) 式(20)写成向量和矩阵形式为
$ \hat {\pmb{z}} = \hat T\hat {\pmb{x}} $
(21) 其中, $ \hat T$为可逆变换矩阵
$ \hat T = \left[{\begin{array}{*{20}c} 1 & 0 & \cdots & 0 & 0 \\ {{ {C}}_1^0 \sigma ^1 } & 1 & \cdots & 0 & 0 \\ \vdots & \vdots & \ddots & \vdots & \vdots \\ {{ {C}}_n^0 \sigma ^n } & {{ {C}}_n^1 \sigma ^{n-1} } & \cdots & {{ {C}}_n^{n-1} \sigma } & 1 \\ \end{array}} \right]_{(n + 1) \times (n + 1)} $
(22) 根据引理1, 采用线性ESO(8)对式(2)的状态进行估计, 式(9)和式(10)成立, 则有
$ {\pmb{z}} - \hat {\pmb{z}} = T({\pmb{x}} - \hat {\pmb{x}}) $
(23) $ \mathop {\lim }\limits_{\varepsilon \to 0} \left| {{\pmb{z}}(t) - \hat {\pmb{z}}(t)} \right| = T\mathop {\lim }\limits_{\varepsilon \to 0} \left| {{\pmb{x}}(t) - \hat {\pmb{x}}(t)} \right| = 0 $
(24) $ x_{n + 1} - \hat x_{n + 1} = z_{n + 1} - \hat z_{n + 1} - \sum\limits_{i = 1}^n {{ {C}}_n^i \sigma (x_i - \hat x_i )} $
(25) 式(25)两边取绝对值有
$ \left| {z_{n + 1} (t) - \hat z_{n + 1} (t)} \right| \le \left| {x_{n + 1} - \hat x_{n + 1} } \right| + \left| {\sum\limits_{i = 1}^n {{ {C}}_n^i \sigma (x_i - \hat x_i )} } \right| $
(26) 由式(9)和式(24)有
$ \mathop {\lim }\limits_{\varepsilon \to 0} \left| {z_{n + 1} (t) - \hat z_{n + 1} (t)} \right| = 0 $
(27) 即定理1中的式(15)成立.同理, 由式(17)、式(20)和式(25)以及高阶无穷小的概念有
$ \overline {\mathop {\lim }\limits_{{{t}} \to \infty } } \left| {z_i (t) - \hat z_i (t)} \right| \le o(\varepsilon ^{(n + 2 - i)} ) $
即定理1中的式(16)成立.
定理1给出了惯性串联系统的线性ESO, 从$\hat x_{n + 1}$和$ \hat z_{n+ 1}$的关系可以看出, 采用ESO估计多了一项$ \sum_{i = 1}^n { {C}}_n^i \sigma (x_i -\hat x_i)$, 这项正是在补偿控制中直接用于配置$n$重极点$\sigma $引起的.
2.2 惯性串联型自抗扰控制
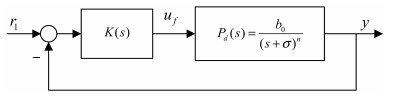
采用惯性串联型ESO进行动态补偿线性化的同时, 还进行被控对象的期望极点配置, 把实际的非线性被控对象模型变为期望的线性被控对象模型.由图~2可得到闭环系统的传递函数为
$ { \varPhi }(s) = \frac{{K(s)P_d (s)}}{{1 + K(s)P_d (s)}} = \frac{{Kb_0 }}{{(s + \sigma )^n + Kb_0 }} $
(28) 可以根据式(28)的闭环系统期望极点直接选择$ \sigma$和$K$.对于跟踪问题, 还可以引入参考输入的前馈控制量, 改善跟踪性能.
图 3是在经典ADRC理论基础上, 采用惯性串联型ESO和增加参考轨迹的高阶导数作为前馈控制量后的惯性串联型ADRC, 其控制输入为
$ u = r_{n + 1} + u_f - \frac{{\hat z_{n + 1} }}{{b_0 }} $
(29) 若采用PD反馈控制, 则有
$ u_f = (k_p + k_d s)(r - y) $
(30) $ u = r_{n + 1} + (k_p + k_d s)(r - y) - \frac{{\hat z_{n + 1} }}{{b_0 }} $
(31) 其中, $ k_p > 0 $和$ k_d > 0$为反馈控制的比例增益和微分增益.
从图 1和图 3可以看出, 经典ADRC和惯性串联型ADRC是具有三自由度(3-degree of freedom, 3-DOF)的控制系统, 第一个自由度对输入信号的过渡过程进行规划, 可以采用ADRC技术之一的跟踪微分器(Tracking differentiator, TD)来实现, 解决快速跟踪性和系统超调之间的矛盾; 第二个自由度为ESO, 实现动态非线性补偿以克服外部干扰和内部模型不确定性影响, 把非线性时变不确定系统划分积分串联或者惯性串联确定系统; 第三个自由度为反馈控制器, 可以采用非线性或者线性控制器, 虽然韩京清在其原著中采用了大量的非线性控制方法, 但由于线性控制器比较简单, 在实际应用中被大量选用.与图 1的ADRC不同的是, 图 3的惯性串联型ADRC中系统状态$ z_i$的估计状态$ \hat z_i$不再是被控对象输出$ y$的直接求导, 需要经过式(17)的反变换才能用于得到系统输出的导数, 用于式(31)中控制量的计算.
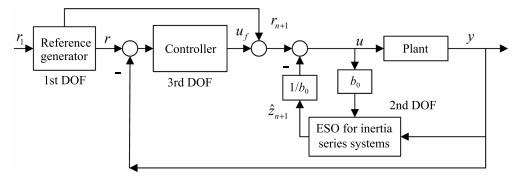
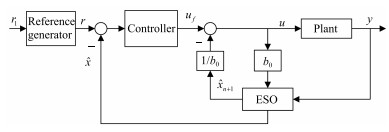
与经典ADRC一样, 惯性串联型ADRC中也可以包含已有模型知识, 处理方法与经典ADRC类似, 图 4为部分模型已知的惯性串联型ADRC, $f_0 (\hat {\pmb{z}})$为模型已知的部分, 分别作为了惯性串联型ESO和系统控制输入的一部分.
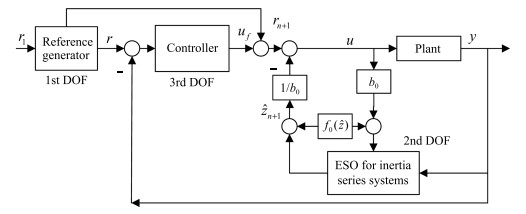 图 4 部分模型已知的惯性串联型自抗扰控制结构Fig. 4 ADRC topology for inertia series systems with partially known model
图 4 部分模型已知的惯性串联型自抗扰控制结构Fig. 4 ADRC topology for inertia series systems with partially known model对于部分模型已知的惯性串联型ADRC, 其ESO为
$ \begin{cases} \dot {\hat z}_i (t) = - \sigma \hat z_i + \hat z_{i + 1} - \alpha _i (\hat z_1 - z_1 ), \quad i = 1, \cdots, n - 1 \\[1mm] \dot {\hat z}_n (t) = - \sigma \hat z_n + \hat z_{n + 1} - \alpha _n (\hat z_1 - z_1 ) + f_0 (\hat z)+b_0 u(t) \\[1mm] \dot {\hat z}_{n + 1} (t) = - \sigma \hat z_{n + 1} - \alpha _{n + 1} (\hat z_1 - z_1 ) \end{cases} $
(32) 相应地, 系统的控制输入为
$ u = r_{n + 1} + u_f - \frac{{f_0 (\hat {\pmb{z}}) + \hat z_{n + 1} }}{{b_0 }} $
(33) 2.3 惯性串联型ADRC与基于DOB的控制
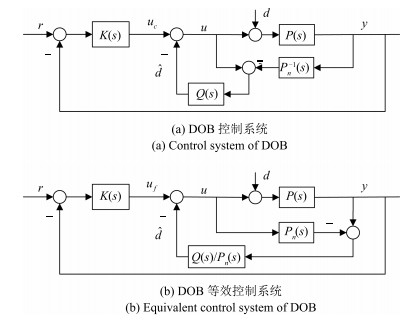
基于DOB的控制方法是另一种典型的抗扰动控制方法[22-23], 图 5 (a)给出经典DOB原理图, 图 5 (b)是其等效电路图. 图 5中, $ P_n (s)$为标称模型, $Q(s)$为低通滤波器, $ P(s)$为被控对象传递函数且有
$ P(s) = P_n (s)(1 + \Delta (s)) $
(34) 其中, $\Delta (s)$为传递函数的建模误差.基于DOB的控制的系统输入和输出为
$ u = u_f - \hat d $
(35) $ y = P(u + d) $
(36) 其中, $ u_f$为反馈控制量, $\hat d $为系统模型不匹配$\Delta (s) $和外部扰动$d$对系统输出总影响的从系统输入等效的总扰动估计.系统输出和总扰动的传递函数为
$ y = \frac{P}{{P_n (1 - Q) + QP}}P_n u_f + \frac{{P(1 - Q)}}{{P_n (1 - Q) + QP}}P_n d $
(37) $ \hat d = \frac{{Q(P - P_n )}}{{P_n (1 - Q) + QP}}u_f + \frac{{QP}}{{P_n (1 - Q) + QP}}d $
(38) 其中, 式(38)的第1项为由被控对象模型和标称模型不匹配引起的内部扰动, 第2项为外部干扰输入$d$引起的外部扰动.
从图 3和图 5可以看出, 若在基于DOB的控制系统中也增加对系统参考输入过渡过程的规划, 可以看出, 虽然惯性串联型ADRC和基于DOB的控制对被控系统输入输出信息的利用方式不同, 但是ADRC和基于DOB的控制都为3-DOF控制系统结构, 它们都把被控系统的内部模型以外的系统输出部分等效到系统输入作为对系统总扰动的估计, 并用此总扰动估计实现对系统的补偿控制.从抗扰控制的发展过程来看, ADRC起初是在时域中提出和研究, 它把状态估计思想发展为扩张状估计器, 估计出系统总扰动并在系统输入进行补偿, 实现抗扰.由于DOBC和ADRC的结构类似, DOBC也具有对总扰动进行估计和补偿功能[24].对于惯性串联型ADRC和基于DOB控制的定量关系有如下定理.
定理2.取惯性串联型ADRC的期望系统模型$P_d (s)$为DOB的标称模型$P_n (s)$, 即
$ P_n (s) = P_d (s) = \frac{{b_0 }}{{(s + \sigma )^n }} $
(39) 同时基于DOB的控制系统中低通滤波器$Q(s)$取为
$ Q(s) = \frac{1}{{(\varepsilon s + \varepsilon \sigma + 1)^{n + 1}}} $
(40) 则有如下等式成立
$ \mathop {\lim }\limits_{\varepsilon \to 0} y = P_n u_f $
(41) $ \mathop {\lim }\limits_{\varepsilon \to 0} \hat z_{n + 1} = b_0 \mathop {\lim }\limits_{\varepsilon \to 0} \hat d $
(42) 即基于DOB的控制与惯性串联型ADRC是统一的, 它们具有相同的补偿控制机制.
证明.低通滤波器$ Q(s)$当$\varepsilon \to 0$的极限为
$ \mathop {\lim }\limits_{\varepsilon \to 0} Q(s) = \mathop {\lim }\limits_{\varepsilon \to 0} \frac{1}{{(\varepsilon s + \varepsilon \sigma + 1)^{n + 1} }} = 1 $
(43) 则根据式(37)有
$ \mathop {\lim }\limits_{\varepsilon \to 0} y = \mathop {\lim }\limits_{Q \to 1} \frac{P}{{P_n (1 - Q) + QP}}P_n u_f + \\ \mathop {\lim }\limits_{Q \to 1} \frac{{P(1 - Q)}}{{P_n (1 - Q) + QP}}P_n d = P_n u_f $
(44) 同理, 根据式(38)有
$ \mathop {\lim }\limits_{\varepsilon \to 0} \hat d = \mathop {\lim }\limits_{Q \to 1} \frac{{Q(P - P_n )}}{{P_n (1 - Q) + QP}}u_f + \\ \mathop {\lim }\limits_{Q \to 1} \frac{{QP}}{{P_n (1 - Q) + QP}}d = \frac{{P - P_n }}{P}u_f + d $
(45) 由定理1的结论并结合式(42)有
$ \mathop {\lim }\limits_{\varepsilon \to 0} \hat z_{n + 1} = b_0 \mathop {\lim }\limits_{\varepsilon \to 0} \hat d = b_0 \left(\frac{{P - P_n }}{P}u_f + d\right) $
(46) 定理2说明:
1) 惯性串联型ESO和DOB都实现了对系统期望模型(或者系统内模)以外总扰动的估计, 它们都把被控系统的输入和输出数据分别为两部分, 一部分是期望模型产生的, 另一部分是期望模型不能解释的, 由系统外部扰动和系统模型其余部分(不包含期望模型)一起产生的, 并在被控系统的输入侧等效为系统总扰动.因此, 抗扰控制本质上是主成分分析(Principal component analysis, PCA)思想在动态系统和控制理论中的应用, 把被控系统的输入输出数据分别投影到期望模型空间和期望模型的补空间. ESO和DOB都有大量的实际应用案例, 相比DOB, ESO除了系统总扰动的估计, 还可以得到系统输出的各阶导数, 而且ADRC对非线性系统有严格的理论证明[6-9].定理2给出的ESO和DOB的内在联系可以使得两种抗扰动控制方法相互引入对方的研究成果, 共同发展.
2) 经典ADRC的期望模型为积分串联模型, 其极点为0;基于DOB的控制的期望模型为标称模型[25-26], 一般通过机理建模或系统辨识方法确定, 反应了实际被控对象的动态特性.惯性串联型ADRC的期望模型是根据闭环控制系统的性能指标来确定, 可以是积分串联模型, 也可以是标称模型, 还可以是其他任何满足用户性能要求的稳定系统模型, 采用期望模型可以充分利用系统模型已有知识, 把已有知识在期望模型中显示表示, 降低了扩张状态观测器的带宽和计算量, 方便调节控制系统参数.
3. 仿真研究
考虑如下的二阶非线性不确定系统
$ \begin{cases} \dot x_1 = - 1.5x_1 + x_2 \\ \dot x_2 = - 1.5x_2 + f(t) + b(t)u \end{cases} $
(47) 系统$(47)$的输入为$u$, $x_1$和$x_2$为系统状态, 系统输出为$y_1$.为了仿真量测噪声对控制性能的影响, 在系统输出中增加高频量测噪声, $ y_1 = x_1 + 0.003\sin (100 t)$, 假设系统$(47)$中的$f(t)$和$ b(t)$满足定理1的条件, 但是结构和参数都未知.仿真时取
$ f(t) = 0.5 x_1^2 + 0.5\cos (2t) $
(48) $ b(t) = 4 + 2\sin t $
(49) 控制的目标是使系统的输出$x_1$跟踪参考轨迹$ r_1$.假设系统需要跟踪的参考轨迹为
$ r_1 {\rm{(}}t{\rm{)}} = 1 + 2\sin (0.2t) $
(50) 系统$(47)$为非线性惯性串联系统, 假设$b(t)$的粗略估计为$ b_0 = 4$.对于系统$(47)$的控制, 采用定理1的惯性串联型ESO补偿系统$(47)$为近似线性系统且把补偿后的线性系统的二重极点配置为$\sigma = 0.4$, 取ESO的工作参数分别为: $ \varepsilon =$ $0.08 $, $ \bar \alpha _1 = 3 $, $ \bar \alpha _2 = 3$, $\bar \alpha _3 = 1$.系统$(47)$经过ESO补偿后的传递函数为
$ P_d (s) = \frac{{b_0 }}{{(s + \sigma )^n }} = \frac{4}{{(s + 0.4)^2 }} $
(51) 进一步, 图 3的ADRC可以等效为状态方程形式
$ \begin{cases} \dot z_1 = - 0.4z_1 + z_2 \\ \dot z_2 = - 0.4z_2 + (r_3 + u_f ) + (z_3 - \hat z_3 ) \end{cases} $
(52) 其中, $r_3$和$ u_f$分别为参考输入$(50)$的二阶导数和反馈控制量. ESO把非线性系统$(47)$实时补偿为具有期望极点的线性系统.惯性串联系统系统$(52)$的扩张状态$z_3$为
$ z_3 = 2.25x_1 - 3x_2 + f(t) + (b - b_0 )u $
(53) 采用式$(31)$的ADRC控制量, 且采用反馈控制为PD控制, 取$k_p = 20$和$k_d = 5$.
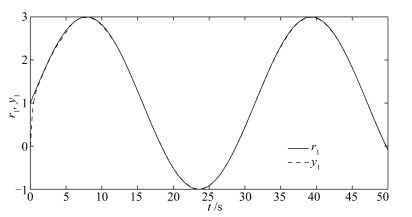
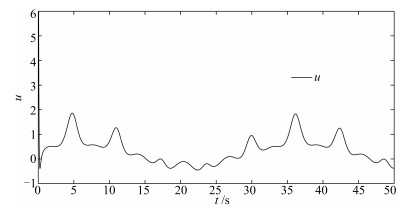
图 6给出了参考输入和系统输出变化曲线, 可以看出, 惯性串联型ADRC实现了系统输出很好地跟踪了参考输入. 图 7是系统的控制输入, 控制输入除了在初始时刻有因峰值现象引起的跳跃之后是光滑的, 可以看出, 初始峰值现象在惯性串联系统中减弱了, 还可以进一步把初始时刻的控制设置为零, 延时一段时间(以避开初始峰值)后才输出系统控制的方法解决[27-28].
图 8是惯性串联型ESO对系统扩张状态$ z_3$的估计$ \hat z_3$的跟随情况, 从图 8可知, 除了由初始状态引起的峰值现象外, $\hat z_3$实现了对$ z_3$的良好跟踪.
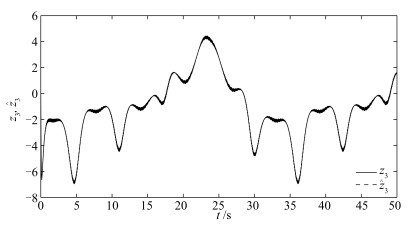 图 8 系统(47)的扩张状态$z_3$及其估计${\hat z}_3$Fig. 8 ES $z_3$ and its estimation ${\hat z}_3$ of system (47)
图 8 系统(47)的扩张状态$z_3$及其估计${\hat z}_3$Fig. 8 ES $z_3$ and its estimation ${\hat z}_3$ of system (47)经典的ADRC先把被控对象的极点配置到原点, 然后通过反馈控制把位于原点的极点配置到期望的位置.由于实际系统本身的极点大多位于左半平面, 经典ADRC采用两次方向不一致的极点配置方法增加了计算量, 采用惯性串联型ESO在原有极点位置的基础上按照控制目标进行适当调整能够集成已有模型知识, 还可以通过已知模型输出与惯性串联型ESO估计的误差来判断控制系统是否有故障, 实现控制系统的故障诊断, 提高整个控制系统的可靠性, 这是下一步的研究工作.
4. 结论
本文提出的惯性串联系统的ADRC控制, 是经典积分串联型ADRC的推广, 同样具有经典ADRC对系统总扰动的估计性能, 惯性串联型ADRC能更好地利用已有系统的知识, 减少ESO的计算量.本文还对惯性串联型ADRC和基于DOB的控制之间的关系进行了研究, 指出它们具有相同的结构和模块功能的3-DOF控制系统, 并给出了它们之间的定量关系.仿真研究表明所提出的惯性串联型ADRC方式是有效的.如何利用惯性串联型ESO实现控制系统的故障诊断是下一步的研究工作.
-
图 4 部分模型已知的惯性串联型自抗扰控制结构
Fig. 4 ADRC topology for inertia series systems with partially known model
-
[1] 韩京清.自抗扰控制器及其应用.控制与决策, 1998, 13(1):19-23 http://www.cqvip.com/Main/Detail.aspx?id=2897440Han Jing-Qing. Auto-disturbances-rejection controller and it's applications. Control and Decision, 1998, 13(1):19-23 http://www.cqvip.com/Main/Detail.aspx?id=2897440 [2] Han J Q. From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics, 2009, 56(3):900-906 doi: 10.1109/TIE.2008.2011621 [3] Gao Z Q. Active disturbance rejection control:a paradigm shift in feedback control system design. In:Proceedings of the 2006 American Control Conference. Minneapolis, MN, USA:IEEE, 2006. 2399-2405 [4] Huang Y, Xue W C. Active disturbance rejection control:methodology and theoretical analysis. ISA Transactions, 2014, 53(4):963-976 doi: 10.1016/j.isatra.2014.03.003 [5] Gao Z Q. Active disturbance rejection control:from an enduring idea to an emerging technology. In:Proceedings of the 10th International Workshop on Robot Motion and Control. Poznan, Poland:IEEE, 2006. 269-282 [6] Gao Z Q. Scaling and bandwidth-parameterization based controller tuning. In:Proceedings of the 2003 American Control Conference. Denver, USA:IEEE, 2003. 4989-4996 [7] Zhao Z L, Guo B Z. Extended state observer for uncertain lower triangular nonlinear systems. Systems and Control Letters, 2015, 85:100-108 doi: 10.1016/j.sysconle.2015.09.004 [8] Guo B Z, Zhao Z L. On convergence of the nonlinear active disturbance rejection control for MIMO systems. SIAM Journal on Control and Optimization, 2013, 51(2):1727-1757 doi: 10.1137/110856824 [9] 武雷, 保宏, 杜敬利, 王从思.一种自抗扰控制器参数的学习算法.自动化学报, 2014, 40(3):556-560 http://www.aas.net.cn/CN/abstract/abstract18321.shtmlWu Lei, Bao Hong, Du Jing-Li, Wang Cong-Si. A learning algorithm for parameters of automatic disturbances rejection controller. Acta Automatica Sinica, 2014, 40(3):556-560 http://www.aas.net.cn/CN/abstract/abstract18321.shtml [10] Zheng Q, Gao L Q, Gao Z Q. On validation of extended state observer through analysis and experimentation. Journal of Dynamic Systems, Measurement, and Control, 2012, 134(2):024505 doi: 10.1115/1.4005364 [11] Guo B Z, Zhao Z L. On the convergence of an extended state observer for nonlinear systems with uncertainty. Systems and Control Letters, 2011, 60(6):420-430 doi: 10.1016/j.sysconle.2011.03.008 [12] Yang X X, Huang Y. Capabilities of extended state observer for estimating uncertainties. In:Proceedings of the 2009 American Control Conference. St. Louis, MO, USA:IEEE, 2009. 3700-3705 [13] Zhou W K, Shao S, Gao Z Q. A stability study of the active disturbance rejection control problem by a singular perturbation approach. Applied Mathematical Sciences, 2009, 3(10):491-508 [14] Xue W C, Huang Y. On frequency-domain analysis of ADRC for uncertain system. In:Proceedings of the 2013 American Control Conference. Washington, DC, USA:IEEE, 2013. 6637-6642 [15] 陈增强, 孙明玮, 杨瑞光.线性自抗扰控制器的稳定性研究.自动化学报, 2013, 39(5):574-580 http://www.aas.net.cn/CN/abstract/abstract17868.shtmlChen Zeng-Qiang, Sun Ming-Wei, Yang Rui-Guang. On the stability of linear active disturbance rejection control. Acta Automatica Sinica, 2013, 39(5):574-580 http://www.aas.net.cn/CN/abstract/abstract17868.shtml [16] Guo B Z, Zhao Z L. On convergence of nonlinear active disturbance rejection for SISO systems. In:Proceedings of the 24th Chinese Control and Decision Conference. Taiyuan, China:IEEE, 2012. 3507-3512 [17] 程春华, 胡云安, 吴进华.非仿射纯反馈非线性系统的自抗扰控制.自动化学报, 2014, 40(7):1528-1536 http://www.aas.net.cn/CN/abstract/abstract18423.shtmlCheng Chun-Hua, Hu Yun-An, Wu Jin-Hua. Auto disturbance controller of non-affine nonlinear pure feedback systems. Acta Automatica Sinica, 2014, 40(7):1528-1536 http://www.aas.net.cn/CN/abstract/abstract18423.shtml [18] Guo B Z, Zhao Z L. On convergence of tracking differentiator. International Journal of Control, 2011, 84(4):693-701 doi: 10.1080/00207179.2011.569954 [19] Xue W C, Huang Y, Yang X X. What kinds of system can be used as tracking-differentiator. In:Proceedings of the 29th Chinese Control Conference. Beijing, China:IEEE, 2010. 6113-6120 [20] 李杰, 齐晓慧, 夏元清, 高志强.线性/非线性自抗扰切换控制方法研究.自动化学报, 2016, 42(2):202-212 http://www.aas.net.cn/CN/abstract/abstract18810.shtmlLi Jie, Qi Xiao-Hui, Xia Yuan-Qing, Gao Zhi-Qiang. On linear/nonlinear active disturbance rejection switching control. Acta Automatica Sinica, 2016, 42(2):202-212 http://www.aas.net.cn/CN/abstract/abstract18810.shtml [21] Guo B Z, Zhao Z L. On convergence of non-linear extended state observer for multi-input multi-output systems with uncertainty. IET Control Theory and Applications, 2012, 6(15):2375-2386 doi: 10.1049/iet-cta.2012.0123 [22] Schrijver E, van Dijk J. Disturbance observers for rigid mechanical systems:equivalence, stability, and design. Journal of Dynamic Systems, Measurement, and Control, 2002, 124(4):539-548 doi: 10.1115/1.1513570 [23] Shim H, Joo Y J. State space analysis of disturbance observer and a robust stability condition. In:Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, LA, USA:IEEE, 2007. 2193-2198 [24] Xue W C, Huang Y. Comparison of the DOB based control, a special kind of PID control and ADRC. In:Proceedings of the 2011 American Control Conference. San Francisco, CA, USA:IEEE, 2011. 4373-4379 [25] 于哲, 王璐, 苏剑波.基于干扰观测器的不确定线性多变量系统控制.自动化学报, 2014, 40(11):2643-2649 http://www.aas.net.cn/CN/abstract/abstract18542.shtmlYu Zhe, Wang Lu, Su Jian-Bo. Disturbance observer based control for linear multi-variable systems with uncertainties. Acta Automatica Sinica, 2014, 40(11):2643-2649 http://www.aas.net.cn/CN/abstract/abstract18542.shtml [26] Shim H, Jo N H. An almost necessary and sufficient condition for robust stability of closed-loop systems with disturbance observer. Automatica, 2009, 45(1):296-299 doi: 10.1016/j.automatica.2008.10.009 [27] Cunha J P V S, Costa R R, Lizarralde F, Hsu L. Peaking free variable structure control of uncertain linear systems based on a high-gain observer. Automatica, 2009, 45(5):1156-1164 doi: 10.1016/j.automatica.2008.12.018 [28] Xue W C, Huang Y. On performance analysis of ADRC for nonlinear uncertain systems with unknown dynamics and discontinuous disturbance. In:Proceedings of the 32nd Chinese Control Conference. Xi'an, China:IEEE, 2013. 1102-1107 期刊类型引用(7)
1. 李向阳,高志强,田森平,哀薇. 大时滞不确定系统的滞后时间削弱与自抗扰控制. 控制理论与应用. 2024(02): 249-260 .  百度学术
百度学术2. 杨挺,唐子慧. 太阳能联产系统自抗扰功率协调控制. 电力系统自动化. 2022(06): 92-101 . 百度学术3. 王怡怡,赵志良. 二自由度无人直升机的非线性自抗扰姿态控制. 自动化学报. 2021(08): 1951-1962 . 本站查看4. 陈志旺,李博,张忠新,宋娟,彭勇. 四旋翼飞行器串级自抗扰姿态控制方法研究. 小型微型计算机系统. 2020(03): 625-630 . 百度学术5. 杨飞,谈树萍,薛文超,郭金,赵延龙. 饱和约束测量扩张状态滤波与无拖曳卫星位姿自抗扰控制. 自动化学报. 2020(11): 2337-2349 . 本站查看6. 李军,刘哲,周永言. 一种新型高性能控制器的研究与应用. 自动化学报. 2020(12): 2558-2571 . 本站查看7. 侯国莲,弓林娟,苏烨,唐耀华. 基于ACP的平行发电控制系统. 智能科学与技术学报. 2019(03): 269-279 . 百度学术其他类型引用(6)
-

 下载:
下载:
 下载:
下载:
计量
- 文章访问数: 2410
- HTML全文浏览量: 310
- PDF下载量: 1020
- 被引次数: 13
