

-
摘要: 为了解决传统鲁棒水印技术不可感知性和鲁棒性间的矛盾,对空域零水印技术进行研究,分析了常规图像处理攻击对载体图像所有选择分块整体均值与分块均值间大小关系的影响,结果表明此关系具有较强的稳健性.基于此,提出了一种新的空域强鲁棒零水印方案.1)利用混沌系统对初值敏感的特性映射图像分块的位置和采用混沌加密与Arnold空间置乱技术对原始水印信号进行预处理;2)采用载体图像所有选择分块整体均值与分块均值间大小关系的稳健性能来构造特征信息;3)采用混沌加密和Arnold空间置乱技术对生成的零水印信号进行后处理.仿真实验结果表明,本文算法对常规的图像处理、尺寸缩放、旋转和多种组合攻击等都表现出较强的抗攻击能力.与相似的鲁棒零水印方案相比,本文算法的平均运行时间不仅减少了约90%,而且抗攻击平均性能提高了约15%,表明它具有较低的计算复杂度和更优越的鲁棒性能,适用于对载体图像质量要求较高的作品版权保护应用场合.Abstract: In order to solve the contradiction between imperceptibility and robustness of traditional robust watermarking technology, the spatial domain zero watermarking technology is researched and the effect of the numerical relationship between the overall mean of all selected blocks and block mean against common image processing attacks is analyzed. The results show that the numerical relationship has strong stability. Based on this, a new zero watermarking scheme with strong robustness in the spatial domain is proposed. Firstly, using the characteristic of sensitivity to initial value, logistic mapping is used to find the position of image block and the original copyright information is pre-processed by chaotic encryption and Arnold scrambling technologies. Secondly, the stability of the numerical relationship between the overall mean of all selected blocks and block mean is utilized to generate feature information. Finally, the generated zero watermarking signal is post-processed again by chaotic encryption and Arnold scrambling technologies. Experimental results on a large number of standard test images show that the proposed algorithm has strong robustness against common image processing, scaling, rotation, and various combination attacks. Compared with similar robust zero watermarking schemes, the proposed scheme not only saves 90% running time but also improves robustness performance by 15% on average. These results show that it has lower computational complexity and better performance and can be applied in copyright protection applications for high quality requirements of cover images.
-
Key words:
- Chaos system /
- spatial domain /
- zero watermarking /
- common attack /
- combination attack /
- robustness
-
近些年来, 由于多智能体协同控制在编队控制[1]、机器人网络[2]、群集行为[3]、移动传感器[4-5]等方面的广泛应用, 多智能体系统的协同控制问题受到了众多研究者的广泛关注.一致性问题是多智能体系统协同控制领域的一个关键问题, 其目的是通过与邻居之间的信息交换, 使所有智能体的状态达成一致.迄今为止, 对多智能体一致性的研究也已取得了丰硕的成果, 根据多智能体的动力学模型分类, 主要可以将其分为以下4种情形:一阶[6-9]、二阶[10-13]、三阶[14-15]、高阶[16-18].
在实际应用中, 由于CPU处理速度和内存容量的限制, 智能体不能频繁地进行控制以及与其邻居交换信息.因此, 事件触发控制策略作为减少控制次数和通信负载的有效途径, 受到了越来越多的关注.到目前为止, 对事件触发控制机制的研究也取得了很多成果[19-23].Xiao等[19]基于事件触发控制策略, 解决了带有领航者的离散多智能体系统的跟踪问题.通过利用状态测量误差并且基于二阶离散多智能体系统动力学模型, Zhu等[20]提出了一种自触发的控制策略, 该策略使得所有智能体的状态均达到一致. Huang等[21]研究了基于事件触发策略的Lur$'$e网络的跟踪问题.针对不同的领航者-跟随者系统, Xu等[22]提出了3种不同类型的事件触发控制器, 包含分簇式控制器、集中式控制器和分布式控制器, 以此来解决对应的一致性问题.然而, 大多数现有的事件触发一致性成果集中于考虑一阶多智能体系统和二阶多智能体系统, 很少有成果研究三阶多智能体系统的事件触发控制问题, 特别是对于三阶离散多智能体系统, 成果更是少之又少.所以, 设计相应的事件触发控制协议来解决三阶离散多智能体系统的一致性问题已变得尤为重要.
本文研究了基于事件触发控制机制的三阶离散多智能体系统的一致性问题, 文章主要有以下三点贡献:
1) 利用位置、速度和加速度三者的测量误差, 设计了一种新颖的事件触发控制机制.
2) 利用不等式技巧, 分析得到了保证智能体渐近收敛到一致状态的充分条件.与现有的事件触发文献[19-22]不同的是, 所得的一致性条件与通信拓扑的Laplacian矩阵特征值和系统的耦合强度有关.
3) 给出了排除类Zeno行为的参数条件, 进而使得事件触发控制器不会每个迭代时刻都更新.
1. 预备知识
1.1 代数图论
智能体间的通信拓扑结构用一个有向加权图来表示, 记为.其中, $\vartheta = \left\{ {1, 2, \cdots, n} \right\}$表示顶点集, $\varsigma\subseteq\vartheta\times\vartheta$表示边集, 称作邻接矩阵, ${a_{ij}}$表示边$\left({j, i} \right) \in \varsigma $的权值.当$\left({j, i} \right) \in \varsigma $时, 有${a_{ij}} > 0$; 否则, 有${a_{ij}} = 0$. ${a_{ij}} > 0$表示智能体$i$能收到来自智能体$j$的信息, 反之则不成立.对任意一条边$j$, 节点$j$称为父节点, 节点$i$则称为子节点, 节点$i$是节点$j$的邻居节点.假设通信拓扑中不存在自环, 即对任意$i\in \vartheta $, 有${a_{ii}} = 0$.
定义$L = \left({{l_{ij}}}\right)\in{\bf R}^{n\times n}$为图${\cal G}$的Laplacian矩阵, 其中元素满足${l_{ij}} = - {a_{ij}} \le 0, i \ne j$; ${l_{ii}} = \sum\nolimits_{j = 1, j \ne i}^n {{a_{ij}} \ge 0} $.智能体$i$的入度定义为${d_i} = \sum\nolimits_{j = 1}^n {{a_{ij}}} $, 因此可得到$L = D - \Delta $, 其中, .如果有向图中存在一个始于节点$i$, 止于节点$j$的形如的边序列, 那么称存在一条从$i$到$j$的有向路径.特别地, 如果图中存在一个根节点, 并且该节点到其他所有节点都有有向路径, 那么称此有向图存在一个有向生成树.另外, 如果有向图${\cal G}$存在一个有向生成树, 则Laplacian矩阵$L$有一个0特征值并且其他特征值均含有正实部.
1.2 模型描述
考虑多智能体系统由$n$个智能体组成, 其通信拓扑结构由有向加权图${\cal G}$表示, 其中每个智能体可看作图${\cal G}$中的一个节点, 每个智能体满足如下动力学方程:
$ \begin{equation} \left\{ \begin{array}{l} {x_i}\left( {k + 1} \right) = {x_i}\left( k \right) + {v_i}\left( k \right)\\ {v_i}\left( {k + 1} \right) = {v_i}\left( k \right) + {z_i}\left( k \right)\\ {z_i}\left( {k + 1} \right) = {z_i}\left( k \right) + {u_i}\left( k \right) \end{array} \right. \end{equation} $
(1) 其中, ${x_i}\left(k \right) \in \bf R$表示位置状态, ${v_i}\left(k \right) \in \bf R$表示速度状态, ${z_i}\left(k \right) \in \bf R$表示加速度状态, ${u_i}\left(k \right) \in \bf R$表示控制输入.
基于事件触发控制机制的控制器协议设计如下:
$ \begin{equation} {u_i}\left( k \right) = \lambda {b_i}\left( {k_p^i} \right) + \eta {c_i}\left( {k_p^i} \right) + \gamma {g_i}\left( {k_p^i} \right), k \in \left[ {k_p^i, k_{p + 1}^i} \right) \end{equation} $
(2) 其中, $\lambda> 0$, $\eta> 0$, $\gamma> 0$表示耦合强度,
$ \begin{align*}&{b_i}\left( k \right)= \sum\nolimits_{j \in {N_i}} {{a_{ij}}\left( {{x_j}\left( k \right) - {x_i}\left( k \right)} \right)} , \nonumber\\ &{c_i}\left( k \right)=\sum\nolimits_{j \in {N_i}} {{a_{ij}}\left( {{v_j}\left( k \right) - {v_i}\left( k \right)} \right)}, \nonumber\\ & {g_i}\left( k \right)=\sum\nolimits_{j \in {N_i}} {{a_{ij}}\left( {{z_j}\left( k \right) - {z_i}\left( k \right)} \right)} .\end{align*} $
触发时刻序列定义为:
$ \begin{equation} k_{p + 1}^i = \inf \left\{ {k:k > k_p^i, {E_i}\left( k \right) > 0} \right\} \end{equation} $
(3) ${E_i}\left(k \right)$为触发函数, 具有以下形式:
$ \begin{align} {E_i}\left( k \right)= & \left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|- {\delta _2}{\beta ^k} - \nonumber\nonumber\\ &{\delta _1}\left| {{b_i}\left( {k_p^i} \right)} \right| - {\delta _1}\left| {{c_i}\left( {k_p^i} \right)} \right| - {\delta _1}\left| {{g_i}\left( {k_p^i} \right)} \right| \end{align} $
(4) 其中, ${\delta _1} > 0$, ${\delta _2} > 0$, $\beta > 0$, , ${e_{ci}}\left(k \right) = {c_i}\left({k_p^i} \right) - {c_i}\left(k \right)$, ${e_{gi}}\left(k \right) = {g_i}\left({k_p^i} \right) - {g_i}\left(k \right)$.
令$\varepsilon _i\left(k\right)={x_i}\left(k\right)-{x_1}\left(k\right)$, ${\varphi _i}\left(k\right)={v_i}\left(k \right)-$ ${v_1}\left(k\right)$, ${\phi _i}(k) = {z_i}(k) - {z_1}\left(k \right)$, $i = 2, \cdots, n$. , $\cdots, {\varphi _n}\left(k \right)]^{\rm T}$, $\phi \left(k \right) = {\left[{{\phi _2}\left(k \right), \cdots, {\phi _n}\left(k \right)} \right]^{\rm T}}$. $\psi \left(k \right) = {\left[{{\varepsilon ^{\rm T}}\left(k \right), {\varphi ^{\rm T}}\left(k \right), {\phi ^{\rm T}}\left(k \right)} \right]^{\rm T}}$, , ${\bar e_b} = {\left[{{e_{b1}}\left(k \right), \cdots, {e_{b1}}\left(k \right)} \right]^{\rm T}}$, , ${e_{c1}}\left(k \right)]^{\rm T}$, , ${\bar e_g} = $ ${\left[{{e_{g1}}\left(k \right), \cdots, {e_{g1}}\left(k \right)} \right]^{\rm T}}$, $\tilde e\left(k \right) = [\tilde e_b^{\rm T}\left(k \right), \tilde e_c^{\rm T}\left(k \right), $ $\tilde e_g^{\rm T}\left(k \right)]^{\rm T}$, $\bar e\left(k \right) = [\bar e_b^{\rm T}\left(k \right), \bar e_c^T\left(k \right), \bar e_g^{\rm T}\left(k \right)]^{\rm T}$,
$ \hat L = \left[ {\begin{array}{*{20}{c}} {{d_2} + {a_{12}}}&{{a_{13}} - {a_{23}}}& \cdots &{{a_{1n}} - {a_{2n}}}\\ {{a_{12}} - {a_{32}}}&{{d_3} + {a_{13}}}& \cdots &{{a_{1n}} - {a_{3n}}}\\ \vdots & \vdots & \ddots & \vdots \\ {{a_{12}} - {a_{n2}}}&{{a_{13}} - {a_{n3}}}& \cdots &{{d_n} + {a_{1n}}} \end{array}} \right] $
再结合式(1)和式(2)可得到:
$ \begin{equation} \psi \left( {k + 1} \right) = {Q_1}\psi \left( k \right) + {Q_2}\left( {\tilde e\left( k \right) - \bar e\left( k \right)} \right) \end{equation} $
(5) 其中, , .
定义1.对于三阶离散时间多智能体系统(1), 当且仅当所有智能体的位置变量、速度变量、加速度变量满足以下条件时, 称系统(1)能够达到一致.
$ \begin{align*} &{\lim _{k \to \infty }}\left\| {{x_j}\left( k \right) - {x_i}\left( k \right)} \right\| = 0 \nonumber\\ & {\lim _{k \to \infty }}\left\| {{v_j}\left( k \right) - {v_i}\left( k \right)} \right\| = 0 \nonumber\\ & {\lim _{k \to \infty }}\left\| {{z_j}\left( k \right) - {z_i}\left( k \right)} \right\| = 0 \\&\quad\qquad \forall i, j = 1, 2, \cdots , n \end{align*} $
定义2.如果$k_{p + 1}^i - k_p^i > 1$, 则称触发时刻序列$\left\{ {k_p^i} \right\}$不存在类Zeno行为.
假设1.假设有向图中存在一个有向生成树.
2. 一致性分析主要结果
假设$\kappa$是矩阵${Q_1}$的特征值, ${\mu _i}$是$L$的特征值, 则有如下等式成立:
$ {\rm{det}}\left( {\kappa {I_{3n - 3}} - {Q_1}} \right)=\nonumber\\ \det \left(\! \!{\begin{array}{*{20}{c}} {\left( {\kappa - 1} \right){I_{n - 1}}}\!&\!{ - {I_{n - 1}}}\!&\!{{0_{n - 1}}}\\ {{0_{n - 1}}}\!&\!{\left( {\kappa - 1} \right){I_{n - 1}}}\!&\!{ - {I_{n - 1}}}\\ {\lambda {{\hat L}_{n - 1}}}\!&\!{\eta {{\hat L}_{n - 1}}}\!&\!{\left( {\kappa - 1} \right){I_{n - 1}} + \gamma {{\hat L}_{n - 1}}} \end{array}} \!\!\right)=\nonumber\\ \prod\limits_{i = 2}^n {\left[ {{{\left( {\kappa - 1} \right)}^3} + \left( {\lambda + \eta \left( {\kappa - 1} \right) + \gamma {{\left( {\kappa - 1} \right)}^2}} \right){\mu _i}} \right]} $
令
$ \begin{align} {m_i}\left( \kappa \right)= &{\left( {\kappa - 1} \right)^3} + \nonumber\\&\left( {\lambda + \eta \left( {\kappa - 1} \right) + \gamma {{\left( {\kappa - 1} \right)}^2}} \right){\mu _i} = 0, \nonumber\\& \qquad\qquad\qquad\qquad\qquad i = 2, \cdots , n \end{align} $
(6) 则有如下引理:
引理1[15]. 如果矩阵$L$有一个0特征值且其他所有特征值均有正实部, 并且参数$\lambda $, $\eta $, $\gamma $满足下列条件:
$ \left\{ \begin{array}{l} 3\lambda - 2\eta < 0\\ \left( {\gamma - \eta + \lambda } \right)\left( {\lambda - \eta } \right) < - \dfrac{{\lambda \Re \left( {{\mu _i}} \right)}}{{{{\left| {{\mu _i}} \right|}^2}}}\\ \left( {4\gamma + \lambda - 2\eta } \right)<\dfrac{{8\Re \left( {{\mu _i}} \right)}}{{{{\left| {{\mu _i}} \right|}^2}}} \end{array} \right. $
那么, 方程(6)的所有根都在单位圆内, 这也就意味着矩阵${Q_1}$的谱半径小于1, 即$\rho \left({{Q_1}} \right) < 1$.其中, 表示特征值${\mu _i}$的实部.
引理2[23]. 如果, 那么存在$M \ge 1$和$0 < \alpha < 1$使得下式成立
$ {\left\| {{Q_1}} \right\|^k} \le M{\alpha ^k}, \quad k \ge 0 $
定理1. 对于三阶离散多智能体系统(1), 基于假设1, 如果式(2)中的耦合强度满足引理1中的条件, 触发函数(4)中的参数满足$0 < {\delta _1} < 1$, , $0 < \alpha < \beta < 1$, 则称系统(1)能够实现渐近一致.
证明.令$\omega \left(k \right) = \tilde e\left(k \right) - \bar e\left(k \right)$, 式(5)能够被重新写成如下形式:
$ \begin{equation} \psi \left( k \right) = Q_1^k\psi \left( 0 \right) + {Q_2}\sum\limits_{s = 0}^{k - 1} {Q_1^{k - 1 - s}\omega \left( s \right)} \end{equation} $
(7) 根据引理1和引理2可知, 存在$M \ge 1$和$0 < \alpha < 1$使得下式成立.
$ \begin{align} \left\| {\psi \left( k \right)} \right\|\le & {\left\| {{Q_1}} \right\|^k}\left\| {\psi \left( 0 \right)} \right\| + \nonumber\\ & \left\| {{Q_2}} \right\|\sum\limits_{s = 0}^{k - 1} {{{\left\| {{Q_1}} \right\|}^{k - 1 - s}}\left\| {\omega \left( s \right)} \right\|}\le \nonumber\\ & M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^k}+\nonumber\\ & M\left\| {{Q_2}} \right\|\sum\limits_{s = 0}^{k - 1} {{\alpha ^{k - 1 - s}}\left\| {\omega \left( s \right)} \right\|} \end{align} $
(8) 由触发条件可得:
$ \begin{align} & \left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|\le\nonumber\\ & \qquad{\delta _1}\left| {{b_i}\left( {k_p^i} \right)} \right| + {\delta _1}\left| {{c_i}\left( {k_p^i} \right)} \right| +\nonumber\\ &\qquad {\delta _1}\left| {{g_i}\left( {k_p^i} \right)} \right| + {\delta _2}{\beta ^k}\le\nonumber\\ &\qquad {\delta _1}\left\| L \right\| \cdot \left\| {\varepsilon \left( k \right)} \right\| + {\delta _1}\left\| L \right\| \cdot \left\| {\varphi \left( k \right)} \right\| + \nonumber\\ &\qquad{\delta _1}\left\| L \right\| \cdot \left\| {\phi \left( k \right)} \right\|+ {\delta _1}\left| {{e_{bi}} \left( k \right)} \right| + \nonumber\\ &\qquad{\delta _1}\left| {{e_{ci}} \left( k \right)} \right|+ {\delta _1}\left| {{e_{gi}}\left( k \right)} \right| + {\delta _2}{\beta ^k} \end{align} $
(9) 对上式移项可求解得:
$ \begin{align} &\left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|\le \nonumber\\ &\qquad\frac{{{\delta _1}\left\| L \right\| \cdot \left\| {\varepsilon \left( k \right)} \right\|}}{{1 - {\delta _1}}} + \frac{{{\delta _1}\left\| L \right\| \cdot \left\| {\varphi \left( k \right)} \right\|}}{{1 - {\delta _1}}}{\rm{ + }}\nonumber\\ &\qquad\frac{{{\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\phi \left( k \right)} \right\| + \frac{{{\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(10) 又因为, 和, 可得出下列不等式:
$ \begin{align} &\left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|\le\nonumber\\ &\qquad \frac{{{\delta _1}\left\| L \right\|}}{{1 - {\delta _1}}} \cdot \left( {\left\| {\varepsilon \left( k \right)} \right\|{\rm{ + }}\left\| {\varphi \left( k \right)} \right\|{\rm{ + }}\left\| {\phi \left( k \right)} \right\|} \right) +\nonumber\\ &\qquad \frac{{{\delta _2}{\beta ^k}}}{{1 - {\delta _1}}}\le \frac{{3{\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\psi \left( k \right)} \right\| + \frac{{{\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(11) 接着有如下不等式成立:
$ \begin{align} \left\| {e\left( k \right)} \right\|\le \frac{{3\sqrt n {\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\psi \left( k \right)} \right\| + \frac{{\sqrt n {\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(12) 其中, , ${e_b}(k) = \left[{{e_{b1}}(k), \cdots, {e_{bn}}(k)} \right]$, ${e_c}(k) = \left[{{e_{c1}}(k), \cdots, {e_{cn}}(k)} \right]$,
注意到
$ \begin{equation} \left\| {\tilde e( k )} \right\| + \left\| {\bar e( k )} \right\| \le \sqrt {6( {n - 1} )} \left\| {e( k )} \right\| \end{equation} $
(13) 于是有
$ \begin{align} \left\| {\omega ( k )} \right\| &= \left\| {\tilde e( k ) - \bar e\left( k \right)} \right\| \le\nonumber\\ & \left\| {\tilde e\left( k \right)} \right\| + \left\| {\bar e\left( k \right)} \right\|\le\nonumber\\ & \frac{{3\sqrt {6n( {n - 1} )} {\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\psi \left( k \right)} \right\| +\nonumber\\ & \frac{{\sqrt {6n( {n - 1} )} {\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(14) 把式(14)代入式(8)可得
$ \begin{align} \left\| {\psi \left( k \right)} \right\| &\le M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^k}+ \nonumber\\ &\frac{{M\left\| {{Q_2}} \right\|{\alpha ^{k - 1}} {\delta _1}3\sqrt {6n\left( {n - 1} \right)} \left\| L \right\|}}{{1 - {\delta _1}}}\times\nonumber\\ &\sum\limits_{s = 0}^{k - 1} {{\alpha ^{ - s}}\left\| {\psi \left( s \right)} \right\|} + M\left\| {{Q_2}} \right\|{\alpha ^{k - 1}}\times\nonumber\\ &\sum\limits_{s = 0}^{k - 1} {{\alpha ^{ - s}} \frac{{\sqrt {6n\left( {n - 1} \right)} {\delta _2}}} {{1 - {\delta _1}}}{\beta ^s}} \end{align} $
(15) 接下来的部分, 将证明下列不等式成立.
$ \begin{equation} \left\| {\psi \left( k \right)} \right\| \le W{\beta ^k}.\end{equation} $
(16) 其中, $W = \max \left\{ {{\Theta _1}, {\Theta _2}} \right\}$,
首先, 证明对任意的$\rho > 1$, 下列不等式成立.
$ \begin{equation} \left\| {\psi \left( k \right)} \right\| < \rho W{\beta ^k} \end{equation} $
(17) 利用反证法, 先假设式(17)不成立, 则必将存在${k^ * } > 0$使得并且当$k \in \left({0, {k^ * }} \right)$时$\left\| {\psi \left(k \right)} \right\| < \rho W{\beta ^k}$成立.因此, 根据式(17)可得:
$ \begin{align*} &\rho W{\beta ^{{k^ * }}} \le \left\| {\psi \left( {{k^ * }} \right)} \right\| \le\\ &\qquad M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^{{k^ * }}} +\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}}M\times \end{align*} $
$ \begin{align*} &\qquad\sum\limits_{s = 0}^{{k^ * } - 1} {\alpha ^{ - s}}\left[ {\frac{{3\sqrt {6n\left( {n - 1} \right)} {\delta _1}\left\| L \right\| \cdot \left\| {\psi \left( s \right)} \right\|}}{{1 - {\delta _1}}}} \right]+ \\ &\qquad M\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}} \sum\limits_{s = 0}^{{k^ * } - 1} {{\alpha ^{ - s}} \left[ {\frac{{\sqrt {6n\left( {n - 1} \right)} {\delta _2}}}{{1 - {\delta _1}}}{\beta ^s}} \right]} < \\ &\qquad \rho M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^{{k^ * }}} + \rho M\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}}\times\\ &\qquad \sum\limits_{s = 0}^{{k^ * } - 1} {{\alpha ^{ - s}} \left[ {\frac{{3\sqrt {6n\left( {n - 1} \right)} {\delta _1}\left\| L \right\| \cdot W{\beta ^s}}} {{1 - {\delta _1}}}} \right]} +\\ &\qquad\rho M\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}} \sum\limits_{s = 0}^{{k^ * } - 1} {{\alpha ^{ - s}} \left[ {\frac{{\sqrt {6n\left( {n - 1} \right)} {\delta _2}{\beta ^s}}}{{1 - {\delta _1}}}} \right]=} \\ &\qquad \rho M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^{{k^ * }}}- \nonumber\\ &\qquad \rho \frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}}{\alpha ^{{k^ * }}}+\nonumber\\ &\qquad \rho \frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}}{\beta ^{{k^ * }}} \end{align*} $
1) 当$W = M\left\| {\psi \left(0 \right)} \right\|$时, 则有
$ \begin{equation*} \begin{aligned} &M\left\| {\psi \left( 0 \right)} \right\| - \nonumber\\ &\qquad \frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}} \ge 0 \end{aligned} \end{equation*} $
所以可得到
$ \begin{equation} \rho W{\beta ^{{k^ * }}} \le \left\| {\psi \left( {{k^ * }} \right)} \right\| \le \rho M\left\| {\psi \left( 0 \right)} \right\|{\beta ^{{k^ * }}}=\rho W{\beta ^{{k^ * }}} \end{equation} $
(18) 2) 当时, 则有
$ \begin{equation*} \begin{aligned} &M\left\| {\psi \left( 0 \right)} \right\|- \nonumber\\ &\qquad\frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}} < 0 \end{aligned} \end{equation*} $
所以有
$ \begin{align} &\rho W{\beta ^{{k^ * }}} \le \left\| {\psi \left( {{k^ * }} \right)} \right\|\le\nonumber\\ & \frac{{\rho {\delta _2}M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} {\beta ^{{k^ * }}}}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right) - 3{\delta _1}M\left\| {{Q_2}} \right\|\left\| L \right\|\sqrt {6n\left( {n - 1} \right)} }}=\nonumber\\ &\rho W{\beta ^{{k^ * }}} \end{align} $
(19) 根据以上结果, 式(18)和式(19)都与假设相矛盾.这说明原命题成立, 即对任意的$\rho > 1$, 式(17)成立.易知, 如果$\rho \to 1$, 则式(16)成立.根据式(16)可知, 当$k \to + \infty $时, 有, 则系统(5)是收敛的.由$\psi \left(k \right)$的定义可知, 系统(1)能够实现渐近一致.
定理2. 对于系统(1), 如果定理1中的条件成立, 并且控制器(2)中的设计参数满足如下条件,
$ {\delta _1} \in \left( {\frac{{\left( {\beta - \alpha } \right)}}{{\left( {\beta - \alpha } \right) + 3\sqrt {6n\left( {n - 1} \right)} M\left\| {{Q_{\rm{2}}}} \right\|\left\| L \right\|}}, 1} \right)\\ {\delta _2} > \frac{{\left\| L \right\|\left\| {\psi \left( 0 \right)} \right\|M\left( {1 + \beta } \right)}}{\beta } $
那么触发序列中的类Zeno行为将被排除.
证明. 易知排除类Zeno行为的关键是要证明不等式$k_{p + 1}^i - k_p^i > 1$成立.根据事件触发机制可知, 下一个触发时刻将会发生在触发函数(4)大于0时.进而可得到如下不等式
$ \begin{align} &\left| {{e_{bi}}\left( {k_{p + 1}^i} \right)} \right| + \left| {{e_{ci}}\left( {k_{p + 1}^i} \right)} \right| + \left| {{e_{gi}}\left( {k_{p + 1}^i} \right)} \right|\ge\nonumber\\ &\qquad{\delta _1}\left| {{b_i}\left( {k_p^i} \right)} \right| + {\delta _1}\left| {{c_i}\left( {k_p^i} \right)} \right| +\nonumber\\ &\qquad {\delta _1}\left| {{g_i}\left( {k_p^i} \right)} \right| + {\delta _2}{\beta ^{k_{p + 1}^i}} \end{align} $
(20) 定义, .结合式(20), 可得到下式
$ \begin{equation} {G_i}\left( {k_{p + 1}^i} \right) \ge {\delta _1}{H_i}\left( {k_p^i} \right) + {\delta _2}{\beta ^{k_{p + 1}^i}} \end{equation} $
(21) 结合式(16)和式(21)可得
$ \begin{align} {\delta _2}{\beta ^{k_{p + 1}^i}} &\le {G_i}\left( {k_{p + 1}^i} \right) - {\delta _1}{H_i}\left( {k_p^i} \right)\le\nonumber\\ & \left\| L \right\|\left( {\left\| {\psi \left( {k_p^i} \right)} \right\| + \left\| {\psi \left( {k_{p + 1}^i} \right)} \right\|} \right)\le\nonumber\\ & W\left\| L \right\|\left( {{\beta ^{k_p^i}} + {\beta ^{k_{p + 1}^i}}} \right) \end{align} $
(22) 求解上式得
$ \begin{equation} \left( {{\delta _2} - \left\| L \right\|W} \right){\beta ^{k_{p + 1}^i}} \le \left\| L \right\|W{\beta ^{k_p^i}} \end{equation} $
(23) 根据式(23)可得
$ \begin{equation} k_{p + 1}^i - k_p^i > \dfrac{{\ln \dfrac{{W\left\| L \right\|}}{{{\delta _2} - W\left\| L \right\|}}} } {\ln \beta } \end{equation} $
(24) 基于(24)易知当时, 有如下不等式成立
$ \begin{equation} \dfrac{{\ln \dfrac{{W\left\| L \right\|}}{{{\delta _2} - W\left\| L \right\|}}}} {\ln \beta } > 1 \end{equation} $
(25) 此外, 因为$W = M\left\| {\psi \left(0 \right)} \right\|$以及
$ \begin{equation} {\delta _1} > \frac{{\left( {\beta - \alpha } \right)}}{{\left( {\beta - \alpha } \right) + 3\sqrt {6n\left( {n - 1} \right)} M\left\| {{Q_{\rm{2}}}} \right\|\left\| L \right\|}} \end{equation} $
(26) 又可以得出
$ \begin{equation} {\delta _2} > \frac{{\left\| L \right\|\left\| {\psi \left( 0 \right)} \right\|M\left( {1 + \beta } \right)}}{\beta } = \frac{{\left\| L \right\|W\left( {1 + \beta } \right)}}{\beta } \end{equation} $
(27) 该式意味着式(25)成立, 又结合式(24)易知$k_{p + 1}^i - k_p^i > 1$, 即排除类Zeno行为的条件得已满足.
注2.类Zeno行为广泛存在于基于事件触发控制机制的离散系统中.然而, 当前极少有文献研究如何排除类Zeno行为, 尤其是对于三阶多智能体动态模型.定理2给出了排除三阶离散多智能体系统的类Zeno行为的参数条件.
3. 仿真实验
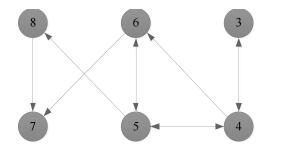
本部分将利用一个仿真实验来验证本文所提算法及理论的正确性和有效性.假设三阶离散多智能体系统(1)包含6个智能体, 且有向加权通信拓扑结构如图 1所示, 权重取值为0或1, 可以明显地看出该图包含有向生成树(满足假设1).
通过简单的计算可得, ${\mu _1} = 0$, ${\mu _2} = 0.6852$, ${\mu _3} = 1.5825 + 0.3865$i, ${\mu _4} = 1.5825 - 0.3865$i, ${\mu _5} = 3.2138$, ${\mu _6} = 3.9360$.令$M = 1$, 结合定理1和定理2可得到$0.035 < {\delta _1} < 1$, ${\delta _2} > 44.0025$, $0 < \alpha < \beta < 1$.令${\delta _1} = 0.2$, ${\delta _2} = 200$, $\alpha = 0.6$, $\beta = 0.9$, $\lambda = 0.02$, $\eta = 0.3$, $\gamma = 0.5$, 不难验证满足引理1的条件并且计算可知$\rho \left({{Q_1}} \right) = 0.9958 < 1$.三阶离散多智能体系统(1)的一致性结果如图 2~图 6所示.根据定理1可知, 基于控制器(2)和事件触发函数(4)的系统(1)能实现一致.从图 2~图 6可以看出, 仿真结果与理论分析符合.
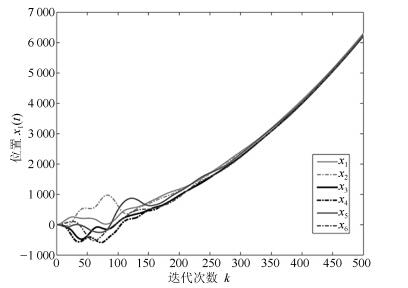 图 2 三阶离散多智能体系统的位置轨迹图Fig. 2 The trajectories of position in third-order discrete-time multi-agent systems
图 2 三阶离散多智能体系统的位置轨迹图Fig. 2 The trajectories of position in third-order discrete-time multi-agent systems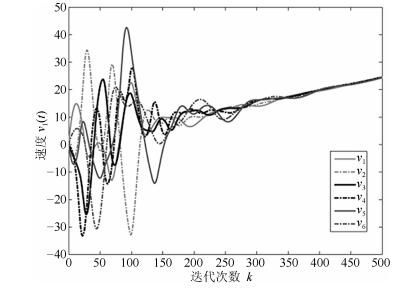 图 3 三阶离散多智能体系统的速度轨迹图Fig. 3 The trajectories of speed in third-order discrete-time multi-agent systems
图 3 三阶离散多智能体系统的速度轨迹图Fig. 3 The trajectories of speed in third-order discrete-time multi-agent systems 图 4 三阶离散多智能体系统的加速度轨迹图Fig. 4 The trajectories of acceleration in third-order discrete-time multi-agent systems
图 4 三阶离散多智能体系统的加速度轨迹图Fig. 4 The trajectories of acceleration in third-order discrete-time multi-agent systems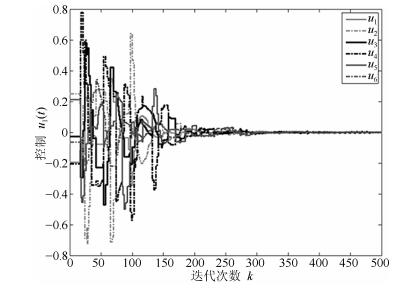 图 5 三阶离散多智能体系统的控制轨迹图Fig. 5 The trajectories of control in third-order discrete-time multi-agent systems
图 5 三阶离散多智能体系统的控制轨迹图Fig. 5 The trajectories of control in third-order discrete-time multi-agent systems图 2~图 4分别表征了系统(1)中所有智能体的位置、速度和加速度的轨迹, 从图中可以看出以上3个变量确实达到了一致.图 5展示了控制输入的轨迹.为了更清楚地体现事件触发机制的优点, 图 6给出了0$ \sim $100次迭代内的各智能体的触发时刻轨迹.从图 6可以看出, 本文设计的事件触发协议确实达到了减少更新次数, 节省资源的目的.
4. 结论
针对三阶离散多智能体系统的一致性问题, 构造了一个新颖的事件触发一致性协议, 分析得到了在通信拓扑为有向加权图且包含生成树的条件下, 系统中所有智能体的位置状态、速度状态和加速度状态渐近收敛到一致状态的充分条件.同时, 该条件指出了通信拓扑的Laplacian矩阵特征值和系统的耦合强度对系统一致性的影响.另外, 给出了排除类Zeno行为的参数条件.仿真实验结果也验证了上述结论的正确性.将文中获得的结论扩展到拓扑结构随时间变化的更高阶多智能体网络是极有意义的.这将是未来研究的一个具有挑战性的课题.
-

图 1 所有选择分块整体均值与各个分块均值间差值关系图
Fig. 1 The flowchart of differences relationship between the overall mean of all selected blocks and each block mean
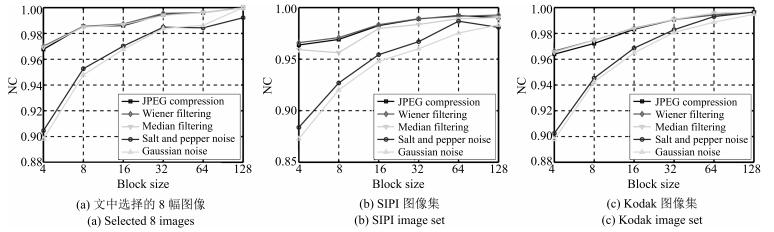
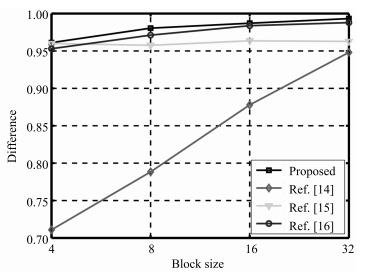
图 4 不同分块大小对本算法性能的影响
Fig. 4 The effect of the algorithm performance for different block size

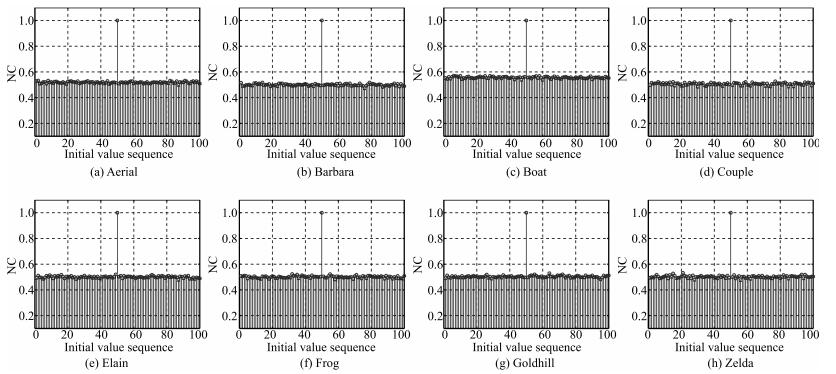
图 7 生成的零水印与伪随机二值信号间的相似度
Fig. 7 Similarities between the generated zero watermarking and random binary signal
表 1 所有选择分块整体均值与分块均值间差值关系变化情况(%)
Table 1 The changes of difference relationship between the overall mean of all selected blocks and block mean (%)
图像集 攻击方式 $P_{1}$ $P_{2}$ $P_{3}$ $P_{4}$ JPEG压缩(20) 2.5417 0.8506 21.1772 中值滤波(3 × 3) 2.7067 0.7202 21.0870 Kodak 维纳滤波(3 × 3) 2.6860 0.7406 21.0334 21.0992 椒盐噪声(0.1) 10.6074 2.7533 22.5952 高斯噪声(0.1) 13.5641 3.1607 22.6128 JPEG压缩(20) 3.3064 2.6867 33.8072 中值滤波(3 × 3) 3.3476 2.4786 33.8938 SIPI 维纳滤波(3 × 3) 3.1466 2.4220 33.6135 34.2121 椒盐噪声(0.1) 12.0245 9.9359 35.5716 高斯噪声(0.1) 13.6321 11.8315 35.8746 JPEG压缩(20) 3.0059 0.4684 12.9183 中值滤波(3 × 3) 3.2848 0.4411 12.8613 UCID 维纳滤波(3 × 3) 2.9985 0.3996 12.8779 12.9180 椒盐噪声(0.1) 13.4309 1.5459 14.1185 高斯噪声(0.1) 19.5050 1.7995 14.3138  下载: 导出CSV
下载: 导出CSV
表 2 组合攻击
Table 2 Combination attacks
JPEG压缩 中值滤波 维纳滤波 椒盐噪声 高斯噪声 攻击方式1 20 3 × 3 3 × 3 0.1 0.1 攻击方式2 15 5 × 5 5 × 5 0.2 0.2 攻击方式3 10 7 × 7 7 × 7 0.3 0.3
下载: 导出CSV
表 3 在给定阈值条件下, 所有选择分块整体均值与分块均值间差值关系变化情况(%)
Table 3 The changes of difference relationship between the overall mean of all selected blocks and block mean with a given threshold (%)
图像集 阈值$T$ 攻击方式 $P_{1}$ $P_{2}$ $P_{3}$ $P_{4}$ Kodak 10 攻击方式1 6.3325 1.6419 21.7064 攻击方式2 12.2779 3.1058 21.0334 22.4345 攻击方式3 22.4367 4.8887 23.4951 20 攻击方式1 5.4244 2.8775 39.5189 攻击方式2 11.9098 6.1418 38.2100 41.3628 攻击方式3 21.6383 10.0186 43.5223 SIPI 10 攻击方式1 7.0620 5.8494 34.6629 攻击方式2 14.6056 10.5559 33.6135 36.0441 攻击方式3 25.8649 16.0384 38.2140 20 攻击方式1 4.7413 6.2570 59.5355 攻击方式2 10.2979 12.7624 58.0793 61.7652 攻击方式3 17.4728 20.5366 64.3733 UCID 10 攻击方式1 8.5528 0.9181 13.4140 攻击方式2 19.8770 1.9943 12.8779 14.1996 攻击方式3 39.3653 3.7169 15.6343 20 攻击方式1 8.1239 2.1013 26.2574 攻击方式2 18.2561 4.6279 25.0641 27.9303 攻击方式3 33.9565 8.3950 30.4609
下载: 导出CSV
表 4 不同载体图像生成的特征信息和零水印均衡性测试
Table 4 Balance test of generated feature information and zero watermarking from different cover images
特征信息$B$ 最终生成的零水印 $N_{0}$ $N_{1}$ $E$ $N_{0}$ $N_{1}$ $E$ Aerial 1 652 2 444 0.1934 2 055 2 041 0.0034 Barbara 2 083 2 013 0.0171 2 086 2 010 0.0186 Boat 1 366 2 730 0.3330 2 055 2 041 0.0034 Couple 1 825 2 271 0.1089 1 998 2 098 0.0244 Elain 2 088 2 008 0.0195 2 085 2 011 0.0181 Frog 2 027 2 069 0.0103 2 042 2 054 0.0029 Goldhill 2 226 1 870 0.0869 2 005 2 091 0.0210 Zelda 1 943 2 153 0.0513 2 078 2 018 0.0146 平均值 1 901 2 195 0.1026 2 051 2 046 0.0133
下载: 导出CSV
表 5 不同算法生成的特征信息和零水印均衡性测试
Table 5 Balance test of generated feature information and zero watermarking from different algorithms
下载: 导出CSV
表 6 不同载体图像零水印间的相似度
Table 6 Similarities between the generated zero watermarking from different cover images
Aerial Barbara Boat Couple Elain Frog Goldhill Zelda Aerial 1.0000 0.5149 0.5498 0.4900 0.4810 0.4651 0.5513 0.5344 Barbara 0.5149 1.0000 0.5330 0.4878 0.5300 0.4897 0.4944 0.4850 Boat 0.5498 0.5330 1.0000 0.5881 0.4756 0.4734 0.5894 0.4465 Couple 0.4900 0.4878 0.5881 1.0000 0.4880 0.4951 0.5461 0.4292 Elain 0.4810 0.5300 0.4756 0.4880 1.0000 0.4832 0.5659 0.5051 Frog 0.4651 0.4897 0.4734 0.4951 0.4832 1.0000 0.4890 0.4912 Goldhill 0.5513 0.4944 0.5894 0.5461 0.5659 0.4890 1.0000 0.5002 Zelda 0.5344 0.4850 0.4465 0.4292 0.5051 0.4912 0.5002 1.0000
下载: 导出CSV
表 7 不同算法零水印间的相似度
Table 7 Similarities between the generated zero watermarking from different algorithms
下载: 导出CSV
表 8 抗噪声攻击实验结果
Table 8 Experimental results against noise attacks
攻击
方式噪声
强度PSNR NC 本文 [13] [14] [15] [16] 椒盐
噪声0.1 15.3992 0.9510 0.6901 0.6318 0.7859 0.8789 0.2 12.3662 0.9239 0.6235 0.5754 0.7461 0.8213 0.3 10.6169 0.8932 0.5927 0.5458 0.7316 0.7741 0.4 9.3830 0.8640 0.5718 0.5292 0.7040 0.7347 0.5 8.4076 0.8289 0.5594 0.5139 0.6700 0.6960 平均值 11.2345 0.8922 0.6075 0.5592 0.7275 0.7810 高斯
噪声0.1 17.1752 0.9756 0.7915 0.7084 0.8910 0.9298 0.2 13.3711 0.9712 0.7885 0.7094 0.8769 0.9263 0.3 10.6398 0.9550 0.7893 0.7016 0.8271 0.9207 0.4 8.7613 0.9241 0.7731 0.6821 0.7332 0.9067 0.5 7.4853 0.8804 0.7500 0.6617 0.6197 0.8783 平均值 11.4865 0.9413 0.7785 0.6927 0.7896 0.9124
下载: 导出CSV
表 9 抗滤波攻击实验结果
Table 9 Experimental results against filtering attacks
攻击
方式窗口
大小PSNR NC 本文 [13] [14] [15] [16] 中值
滤波3 × 3 30.0745 0.9922 0.9132 0.9006 0.9678 0.9816 5 × 5 27.4016 0.9846 0.8826 0.8505 0.9503 0.9650 7 × 7 26.1452 0.9754 0.8652 0.8089 0.9353 0.9482 9 × 9 25.1367 0.9669 0.8495 0.7746 0.9226 0.9335 11 × 11 24.3752 0.9590 0.8348 0.7429 0.9106 0.9207 平均值 26.6266 0.9756 0.8691 0.8155 0.9373 0.9498 维纳
滤波3 × 3 33.3994 0.9959 0.9417 0.9211 0.9733 0.9878 5 × 5 30.7947 0.9915 0.9237 0.8762 0.9600 0.9745 7 × 7 29.3403 0.9855 0.9094 0.8373 0.9469 0.9598 9 × 9 28.2680 0.9790 0.8965 0.8062 0.9335 0.9455 11 × 11 27.4357 0.9710 0.8876 0.7792 0.9228 0.9346 平均值 29.8476 0.9846 0.9118 0.8440 0.9473 0.9605
下载: 导出CSV
表 10 抗JPEG压缩攻击实验结果
Table 10 Experimental results against JPEG compression attacks
品质百分数
(%)PSNR NC 本文 [13] [14] [15] [16] 5 25.5419 0.9559 0.8640 0.6803 0.8941 0.9054 10 27.9958 0.9856 0.8998 0.7787 0.9364 0.9513 15 29.3245 0.9837 0.9138 0.8188 0.9498 0.9661 20 30.2552 0.9866 0.9227 0.8468 0.9571 0.9727 25 30.9669 0.9861 0.9274 0.8721 0.9607 0.9780 30 31.5407 0.9955 0.9317 0.8845 0.9651 0.9813 35 32.0416 0.9932 0.9358 0.8966 0.9656 0.9835 40 32.4319 0.9922 0.9381 0.9019 0.9680 0.9864 45 32.8186 0.9941 0.9424 0.9135 0.9688 0.9870 50 33.1562 0.9952 0.9431 0.9221 0.9706 0.9879 平均值 30.6073 0.9868 0.9219 0.8515 0.9536 0.9700
下载: 导出CSV
表 11 抗常规图像处理组合攻击实验结果
Table 11 Experimental results against common image processing combination attacks
攻击方式 PSNR NC 本文 [13] [14] [15] [16] 中值滤波(5 × 5) +椒盐噪声(0.3) 10.5309 0.8901 0.5784 0.5299 0.7235 0.7685 中值滤波(5 × 5) +高斯噪声(0.3) 10.4693 0.9501 0.7434 0.6449 0.8141 0.9107 维纳滤波(5 × 5) +椒盐噪声(0.3) 10.5801 0.8926 0.5836 0.5341 0.7244 0.7699 维纳滤波(5 × 5) +高斯噪声(0.3) 10.5371 0.9566 0.7641 0.6583 0.8242 0.9139 中值滤波(5 × 5) + JPEG压缩(10) 26.1020 0.9762 0.8676 0.7212 0.9219 0.9341 维纳滤波(5 × 5) + JPEG压缩(10) 27.1870 0.9819 0.8835 0.7425 0.9264 0.9429 JPEG压缩(10) +椒盐噪声(0.3) 10.5540 0.8929 0.5866 0.5481 0.7268 0.7714 JPEG压缩(10) +高斯噪声(0.3) 10.5560 0.9551 0.7610 0.6920 0.8228 0.9099 JPEG压缩(10) +放大2倍+缩小0.5倍 28.3582 0.9856 0.9039 0.8112 0.9417 0.9555 逆时针旋转2度+ JPEG压缩(10) 17.6329 0.8628 0.6854 0.6457 0.8010 0.8060 平均值 18.8576 0.9356 0.7641 0.6879 0.8438 0.8772
下载: 导出CSV
表 12 抗偏移行列攻击实验结果
Table 12 Experimental results against row and column shifting attacks
攻击方式 PSNR NC 本文 [13] [14] [15] [16] 右偏移2列 21.2879 0.9489 0.7796 0.8425 0.9056 0.9129 左偏移2列 21.4324 0.9497 0.7831 0.8425 0.9068 0.9118 上偏移2行 21.9757 0.9522 0.7966 0.8473 0.9172 0.9237 下偏移2行 21.6893 0.9504 0.7897 0.8445 0.9104 0.9198 右偏移2列+上偏移2行 19.8069 0.9271 0.7444 0.7919 0.8827 0.8882 左偏移2列+上偏移2行 19.8413 0.9220 0.7468 0.7906 0.8792 0.8862 右偏移2列+下偏移2行 19.5717 0.9239 0.7410 0.7882 0.8728 0.8807 左偏移2列+下偏移2行 19.7364 0.9248 0.7423 0.7910 0.8747 0.8837 平均值 20.1291 0.9296 0.7528 0.8012 0.8840 0.8917
下载: 导出CSV
表 13 抗偏移行列组合攻击实验结果
Table 13 Experimental results against row and column shifting combination attacks
攻击方式 PSNR NC 本文 [13] [14] [15] [16] 右偏移2列+上偏移2行+逆时针旋转2度 17.1498 0.8561 0.6787 0.6987 0.8225 0.8287 左偏移2列+上偏移2行+逆时针旋转2度 17.1585 0.8554 0.6760 0.7019 0.7764 0.7808 右偏移2列+下偏移2行+放大2倍+缩放0.5倍 19.9653 0.9242 0.7479 0.7871 0.8733 0.8811 左偏移2列+下偏移2行+缩放0.5倍+放大2倍 20.9519 0.9254 0.7674 0.7762 0.8727 0.8839 平均值 18.8166 0.8993 0.7268 0.7304 0.8378 0.8503
下载: 导出CSV
表 14 抗缩放攻击实验结果
Table 14 Experimental results against scaling attacks
插值方法 攻击方式 PSNR NC 本文 [13] [14] [15] [16] bilinear 缩小0.25倍+放大4倍 25.4763 0.9786 0.8584 0.8108 0.9246 0.9475 缩小0.5倍+放大2倍 28.3491 0.9917 0.8994 0.8825 0.9492 0.9735 放大4倍+缩小0.25倍 34.2862 0.9976 0.9483 0.9454 0.9742 0.9898 放大2倍+缩小0.5倍 33.5935 0.9972 0.9433 0.9397 0.9725 0.9891 bicubic 缩小0.25倍+放大4倍 26.4544 0.9910 0.8710 0.8348 0.9399 0.9663 缩小0.5倍+放大2倍 29.9015 0.9968 0.9129 0.9123 0.9626 0.9875 放大4倍+缩小0.25倍 39.3801 0.9989 0.9710 0.9699 0.9859 0.9954 放大2倍+缩小0.5倍 39.0522 0.9987 0.9702 0.9671 0.9855 0.9950 nearest 缩小0.25倍+放大4倍 23.1304 0.9564 0.8201 0.6959 0.9019 0.9089 缩小0.5倍+放大2倍 25.6881 0.9790 0.8653 0.8456 0.9430 0.9522 放大4倍+缩小0.25倍 +$\infty $ 1.0000 1.0000 1.0000 1.0000 1.0000 放大2倍+缩小0.5倍 +$\infty $ 1.0000 1.0000 1.0000 1.0000 1.0000 平均值 30.5312 0.9905 0.9217 0.9003 0.9616 0.9754
下载: 导出CSV
表 15 抗仅缩小或放大缩放攻击实验结果
Table 15 Experimental results against only reduce/enlarge scaling attacks
插值方法 攻击方式 NC 本文 [13] [14] [15] [16] bilinear 缩小0.5倍 0.9963 0.6365 0.9079 0.9587 0.9856 缩小2倍 0.9982 0.7503 0.9607 0.9818 0.9925 放大4倍 0.9982 0.5657 0.9651 0.9837 0.9928 bicubic 缩小0.5倍 0.9976 0.6371 0.9202 0.9643 0.9896 放大2倍 0.9989 0.7507 0.9795 0.9914 0.9965 放大4倍 0.9988 0.5658 0.9791 0.9906 0.9960 nearest 缩小0.5倍 0.9790 0.6202 0.8456 0.9432 0.9522 放大2倍 1.0000 0.7513 1.0000 1.0000 1.0000 放大4倍 1.0000 0.5693 0.9999 1.0000 1.0000 平均值 0.9963 0.6497 0.9509 0.9793 0.9895
下载: 导出CSV
表 16 抗旋转攻击实验结果
Table 16 Experimental results against rotation attacks
插值
方法攻击
方式PSNR NC 本文 [13] [14] [15] [16] bilinear 1° 20.0928 0.9209 0.7514 0.7812 0.8750 0.8809 -1° 20.2172 0.9216 0.7476 0.7753 0.8781 0.8812 3° 16.1739 0.8209 0.6407 0.6640 0.7670 0.7680 -3° 16.3061 0.8223 0.6172 0.6645 0.7720 0.7713 5° 14.5964 0.7571 0.5945 0.6242 0.7097 0.7081 -5° 14.7210 0.7607 0.5645 0.6264 0.7191 0.7177 10° 12.8664 0.6633 0.5369 0.5844 0.6292 0.6315 -10° 12.9698 0.6709 0.5140 0.5825 0.6436 0.6416 30° 10.8797 0.5582 0.4880 0.5235 0.5487 0.5541 -30° 10.9389 0.5634 0.5093 0.5236 0.5525 0.5489 bicubic 1° 19.8760 0.9208 0.7466 0.7815 0.8739 0.8797 -1° 19.9959 0.9211 0.7437 0.7773 0.8776 0.8802 3° 16.0703 0.8205 0.6376 0.6664 0.7655 0.7672 -3° 16.1995 0.8221 0.6147 0.6667 0.7710 0.7702 5° 14.5213 0.7573 0.5934 0.6247 0.7083 0.7072 -5° 14.6440 0.7610 0.5623 0.6280 0.7190 0.7171 10° 12.8152 0.6631 0.5359 0.5847 0.6290 0.6313 -10° 12.9175 0.6708 0.5147 0.5847 0.6434 0.6410 30° 10.8483 0.5582 0.4877 0.5245 0.5488 0.5538 -30° 10.9075 0.5630 0.5083 0.5239 0.5520 0.5491 nearest 1° 19.6571 0.9211 0.7445 0.7818 0.8752 0.8796 -1° 19.7749 0.9214 0.7403 0.7780 0.8779 0.8821 3° 15.9727 0.8203 0.6365 0.6663 0.7640 0.7680 -3° 16.0995 0.8221 0.6150 0.6668 0.7713 0.7717 5° 14.4531 0.7569 0.5928 0.6267 0.7071 0.7080 -5° 14.5743 0.7610 0.5625 0.6247 0.7180 0.7171 10° 12.7704 0.6636 0.5345 0.5843 0.6281 0.6309 -10° 12.8715 0.6705 0.5141 0.5836 0.6425 0.6421 30° 10.8207 0.5579 0.4895 0.5212 0.5493 0.5539 -30° 10.8800 0.5634 0.5089 0.5224 0.5530 0.5486 平均值 14.8811 0.7458 0.5949 0.6356 0.7090 0.7101
下载: 导出CSV
表 17 本文算法与其他算法抗攻击性能的提高率(%)
Table 17 Improvement performance against attacks compared this algorithm with other algorithms (%)
下载: 导出CSV
表 18 不同算法在SIPI图像数据集的实验结果
Table 18 Experimental results on the SIPI image database from different algorithms
攻击方式 PSNR 本文 [13] [14] [15] [16] 椒盐噪声 11.0086 0.8587 0.6164 0.5690 0.7542 0.7940 高斯噪声 12.2500 0.9170 0.7599 0.6611 0.7533 0.9042 中值滤波 24.8580 0.9609 0.8411 0.6904 0.9160 0.9365 维纳滤波 27.5159 0.9697 0.8878 0.7106 0.9328 0.9484 JPEG压缩 29.5265 0.9770 0.9091 0.7514 0.9456 0.9663 常规信号组合 15.6869 0.8959 0.7145 0.6211 0.7929 0.8560 偏移行列 19.8269 0.9085 0.7460 0.6755 0.8703 0.8756 偏移行列组合 17.5026 0.8222 0.6688 0.6184 0.7712 0.7743 缩放 29.0496 0.9843 0.9105 0.7622 0.9536 0.9721 旋转 13.7218 0.6798 0.5567 0.5665 0.6422 0.6416 平均值 20.0947 0.8974 0.7611 0.6626 0.8332 0.8669
下载: 导出CSV
表 19 不同算法在SIPI图像数据集实验结果的方差
Table 19 The variance of experimental results on the SIPI image database from different algorithms
攻击方式 本文 [13] [14] [15] [16] 椒盐噪声 0.0026 0.0030 0.0077 0.0051 0.0034 高斯噪声 0.0025 0.0055 0.0205 0.0338 0.0030 中值滤波 0.0009 0.0043 0.0242 0.0022 0.0020 维纳滤波 0.0008 0.0026 0.0260 0.0016 0.0015 JPEG压缩 0.0006 0.0011 0.0405 0.0008 0.0005 常规信号组合 0.0033 0.0034 0.0143 0.0182 0.0034 偏移行列 0.0040 0.0066 0.0180 0.0072 0.0065 偏移行列组合 0.0085 0.0053 0.0100 0.0106 0.0107 缩放 0.0002 0.0012 0.0401 0.0007 0.0004 旋转 0.0085 0.0041 0.0050 0.0080 0.0081 平均值 0.0032 0.0037 0.0206 0.0088 0.0040
下载: 导出CSV
表 20 不同算法构造零水印运行时间(s)
Table 20 The running time for constructing zero watermarking from different algorithms (s)
本文 [13] [14] [15] [16] Aerial 0.0343 0.5554 0.3541 6.7782 0.1607 Barbara 0.0328 0.5429 0.3494 6.7424 0.1591 Boat 0.0374 0.5429 0.3510 6.8297 0.1560 Couple 0.0328 0.5476 0.3479 6.8282 0.1560 Elain 0.0328 0.5491 0.3510 6.8079 0.1607 Frog 0.0312 0.5491 0.3416 6.7814 0.1513 Goldhill 0.0343 0.5444 0.3494 6.7814 0.1576 Zelda 0.0328 0.5600 0.3557 6.8172 0.1622 平均时间 0.0335 0.5489 0.3500 6.7958 0.1580
下载: 导出CSV
-
[1] 綦科, 谢冬青.基于第二代Bandelet变换的抗几何攻击图像水印.自动化学报, 2012, 38(10):1646-1653 http://www.aas.net.cn/CN/abstract/abstract17774.shtmlQi Ke, Xie Dong-Qing. Watermarking scheme against geometrical attacks based on second generation Bandelet. Acta Automatica Sinica, 2012, 38(10):1646-1653 http://www.aas.net.cn/CN/abstract/abstract17774.shtml [2] 林晓丹.基于高斯混合模型的DCT域水印检测方法.自动化学报, 2012, 38(9):1445-1448 http://www.aas.net.cn/CN/abstract/abstract17754.shtmlLin Xiao-Dan. DCT-domain watermark detection using Gaussian mixture model. Acta Automatica Sinica, 2012, 38(9):1445-1448 http://www.aas.net.cn/CN/abstract/abstract17754.shtml [3] 崔汉国, 刘健鑫, 李正民.基于金字塔技术的STL模型数字水印算法.自动化学报, 2013, 39(6):852-860 http://www.aas.net.cn/CN/abstract/abstract18111.shtmlCui Han-Guo, Liu Jian-Xin, Li Zheng-Min. STL model watermarking algorithm based on pyramid technique. Acta Automatica Sinica, 2013, 39(6):852-860 http://www.aas.net.cn/CN/abstract/abstract18111.shtml [4] 熊祥光, 韦立, 谢刚.基于3D-DCT和SVD的鲁棒彩色图像水印算法.计算机工程与科学, 2015, 37(6):1039-1100 http://or.nsfc.gov.cn/handle/00001903-5/341270Xiong Xiang-Guang, Wei Li, Xie Gang. A robust color image watermarking algorithm based on 3D-DCT and SVD. Computer Engineering and Science, 2015, 37(6):1039-1100 http://or.nsfc.gov.cn/handle/00001903-5/341270 [5] Swaminathan A, Mao Y N, Wu M. Robust and secure image hashing. IEEE Transaction on Information Forensics and Security, 2006, 1(2):215-230 doi: 10.1109/TIFS.2006.873601 [6] 牛夏牧, 焦玉华.感知哈希综述.电子学报, 2008, 36(7):1405-1411 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=dzxu200807028&dbname=CJFD&dbcode=CJFQNiu Xia-Mu, Jiao Yu-Hua. An overview of perceptual hashing. Acta Electronica Sinica, 2008, 36(7):1405-1411 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=dzxu200807028&dbname=CJFD&dbcode=CJFQ [7] 温泉, 孙锬锋, 王树勋.零水印的概念与应用.电子学报, 2003, 31(2):214-216 https://www.wenkuxiazai.com/doc/b60cb0f027284b73f24250b6.htmlWen Quan, Sun Tan-Feng, Wang Shu-Xun. Concept and application of zero-watermark. Acta Electronica Sinica, 2003, 31(2):214-216 https://www.wenkuxiazai.com/doc/b60cb0f027284b73f24250b6.html [8] 叶天语, 马兆丰, 钮心欣, 杨义先.强鲁棒零水印技术.北京邮电大学学报, 2010, 33(3):126-129 http://www.cqvip.com/QK/90982A/201008/34838667.htmlYe Tian-Yu, Ma Zhao-Feng, Niu Xin-Xin, Yang Yi-Xian. A zero-watermark technology with strong robustness. Journal of Beijing University of Posts and Telecommunications, 2010, 33(3):126-129 http://www.cqvip.com/QK/90982A/201008/34838667.html [9] 金炜, 励金祥, 尹曹谦.一种基于可视密码的轮廓小波图像零水印方案.光电子·激光, 2009, 20(5):653-656 https://mall.cnki.net/qikan-I-I2-JSJY-2006-01.htmlJin Wei, Li Jin-Xiang, Yin Cao-Qian. An image zero-watermarking scheme based on visual cryptography utilizing contour-wavelet. Journal of Optoelectronics·Laser, 2009, 20(5):653-656 https://mall.cnki.net/qikan-I-I2-JSJY-2006-01.html [10] 赵春晖, 刘巍.基于分块压缩感知的图像半脆弱零水印算法.自动化学报, 2012, 38(4):609-617 http://www.aas.net.cn/CN/abstract/abstract17715.shtmlZhao Chun-Hui, Liu Wei. Block compressive sensing based image semi-fragile zero-watermarking algorithm. Acta Automatica Sinica, 2012, 38(4):609-617 http://www.aas.net.cn/CN/abstract/abstract17715.shtml [11] 付剑晶, 王珂.基于第一主成分方向稳定性的图像零水印.中国图象图形学报, 2012, 17(7):756-769 doi: 10.11834/jig.20120703Fu Jian-Jing, Wang Ke. Image zero-watermark based on direction stability of first principal component vector. Journal of Image and Graphics, 2012, 17(7):756-769 doi: 10.11834/jig.20120703 [12] 周武杰, 郁梅, 禹思敏, 蒋刚毅, 葛丁飞.一种基于超混沌系统的立体图像零水印算法.物理学报, 2012, 61(8):080701 http://d.old.wanfangdata.com.cn/Periodical/wlxb201208017Zhou Wu-Jie, Yu Mei, Yu Si-Min, Jiang Gang-Yi, Ge Ding-Fei. A zero-watermarking algorithm of stereoscopic image based on hyperchaotic system. Acta Physica Sinica, 2012, 61(8):080701 http://d.old.wanfangdata.com.cn/Periodical/wlxb201208017 [13] 曲长波, 杨晓陶, 袁铎宁.小波域视觉密码零水印算法.中国图象图形学报, 2014, 19(3):365-372 doi: 10.3969/j.issn.1672-6200.2005.02.018Qu Chang-Bo, Yang Xiao-Tao, Yuan Duo-Ning. Zero-watermarking visual cryptography algorithm in the wavelet domain. Journal of Image and Graphics, 2014, 19(3):365-372 doi: 10.3969/j.issn.1672-6200.2005.02.018 [14] 叶天语.基于方差的奇异值分解域鲁棒零水印算法.光子学报, 2011, 40(6):961-966 http://www.opticsjournal.net/abstract.htm?id=OJ1106240002214A7D0FYe Tian-Yu. A robust zero-watermarking algorithm using variance in singular value decomposition domain. Acta Photonica Sinica, 2011, 40(6):961-966 http://www.opticsjournal.net/abstract.htm?id=OJ1106240002214A7D0F [15] 叶天语.抗JPEG压缩和几何攻击的鲁棒零水印算法.光子学报, 2012, 41(2):210-217 http://edu.wanfangdata.com.cn/Periodical/Detail/wxjyyy201414011Ye Tian-Yu. A robust zero-watermarking algorithm resisting JPEG compression and geometric attacks. Acta Photonica Sinica, 2012, 41(2):210-217 http://edu.wanfangdata.com.cn/Periodical/Detail/wxjyyy201414011 [16] 宋伟, 侯建军, 李赵红, 黄亮.一种基于Logistic混沌系统和奇异值分解的零水印算法.物理学报, 2009, 58(7):4449-4456 doi: 10.7498/aps.58.4449Song Wei, Hou Jian-Jun, Li Zhao-Hong, Huang Liang. A novel zero-watermarking algorithm based on Logistic chaotic system and singular value decomposition. Acta Physica Sinica, 2009, 58(7):4449-4456 doi: 10.7498/aps.58.4449 [17] Rani A, Bhullar A K, Dangwal D, Kumar S. A zero-watermarking scheme using discrete wavelet transform. Procedia Computer Science, 2015, 70:603-609 doi: 10.1016/j.procs.2015.10.046 [18] Sun L, Xu J C, Zhang X X, Dong W, Tian Y. A novel generalized Arnold transform-based zero-watermarking scheme. Applied Mathematics and Information Sciences, 2015, 9(4):2023-2035 https://www.researchgate.net/publication/307616012_Novel_zero-watermarking_scheme_based_on_DWT-DCT [19] The USC-SIPI image database[Online], available: http://sipi.usc.edu/database/, May 31, 2016 [20] UCID-uncompressed colour image database[Online], available: http://homepages.lboro.ac.uk/~cogs/datasets/UCID/ucid.html, May 31, 2016 [21] Kodak lossless true color image suite[Online], available: http://r0k.us/graphics/kodak/, May 31, 2016 期刊类型引用(3)
1. 岳振宇,范大昭,董杨,纪松,李东子. 一种星载平台轻量化快速影像匹配方法. 地球信息科学学报. 2022(05): 925-939 .  百度学术
百度学术2. 王若兰,潘万彬,曹伟娟. 图像局部区域匹配驱动的导航式拼图方法. 计算机辅助设计与图形学学报. 2020(03): 452-461 . 百度学术3. 胡敬双,聂洪玉. 灰度序模式的局部特征描述算法. 中国图象图形学报. 2017(06): 824-832 . 百度学术其他类型引用(9)
-

 下载:
下载:


计量
- 文章访问数: 4164
- HTML全文浏览量: 485
- PDF下载量: 627
- 被引次数: 12
