

Negative Obstacle Perception in Unstructured Environment With Double Multi-beam LiDAR
-
摘要: 负障碍感知是非结构化环境下的难点问题,本文针对该问题提出一种新的基于双多线激光雷达(Light detection and ranging,LiDAR)的感知方法.采用分布嵌入式架构对双激光雷达数据进行同步采集与实时处理,将雷达点云映射到多尺度栅格,统计栅格的点云密度与相对高度等特征并标记,从点云数据提取负障碍几何特征,通过将栅格的统计特征与负障碍的几何特征做多特征关联找到关键特征点对,将特征点对聚类并过滤,识别出负障碍.方法不受地面平整度影响,已成功应用在无人驾驶车上.使用表明该方法具有较高的实时性和可靠性,在非结构化环境下具有良好的感知效果.Abstract: Negative obstacle perception is a difficult problem in unstructured environment, and a new negative obstacle perception algorithm in unstructured environment with double multi-beam light detection and ranging (LiDAR) is proposed. Firstly, a distributed embedded architecture for LiDAR data acquisition and processing is designed. Secondly, LiDAR points are projected to multi-scale gird maps and points density as well as relative height of each cell is computed, with each cell marked according to the feature. Then the geometric feature of negative obstacles is extracted from point cloud, the key points in pair are searched with both statistical characteristics and geometric features. Finally, clustering algorithm is used to recognize negative obstacles. The algorithm does not depend on the flatness of the ground and has been successfully applied to an unmanned ground vehicle. The application shows that the algorithm is real-time, reliable and has good detection ability.
-
无人平台技术作为国家"十三五"重点研究方向, 目前正得到广泛研究.无人平台技术包括环境感知与理解、定位定向、自主规划、决策控制和多机协同等关键技术, 其中环境感知与理解是目前研究的重点和难点.对环境信息的获取是无人平台进行其他技术处理的前提, 目前地面无人平台主要的环境感知手段分为图像和距离两大部分, 图像感知包括可见光图像和红外图像两种, 主要用来对环境中的颜色、纹理、边缘、外形、符号等进行感知识别, 距离感知借助于激光雷达(Light detection and ranging, LiDAR)、毫米波雷达、声呐等手段实现, 其中激光雷达凭借其探测距离远、精度高等优点, 得到广泛使用, 激光雷达主要是利用光的收发时间差来获得被反射物体的相对方位角和距离, 根据发射扇面的数量, 激光雷达分为单线(SICK LMS511, LMS111, Hokuyo 10L等)、4/8线(IBEO 4L, 8L)和16/32/64线(Velodyne系列)等种类, 水平方向每个扫描扇面由不同角度的扫描点组成, 称为一根线.
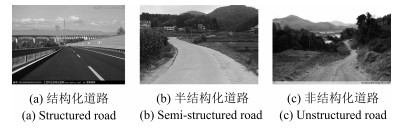
UGV (Unmanned ground vehicle)的研究通常将道路分为三种类型:结构化道路、半结构化道路和非结构化道路.结构化道路是指具有典型道路边缘规则特征、色差特征和行道线特征的平坦道路环境, 例如高速路、国道、省道、城市道路等; 半结构化道路是指无明显道路边缘规则特征和行道线特征的平坦道路环境, 例如一些乡间水泥路、柏油路等; 非结构道路是泛指无道路边缘特征, 非平坦道路的野外环境.如图 1所示.
在结构化、半结构环境中, 由于无人平台所处路面较为平整, 道路边缘较为清晰, 路面障碍主要以行人、车辆等为代表的正(凸)障碍为主, 因此采用单线或四线激光雷达, 基于车体坐标平面的测量换算和Z轴阈值控制方法便可有效解决问题.在非结构道路(越野环境)路面起伏较大, 障碍物不仅有不规整的正障碍(石头、土堆、栅栏、损毁工事等), 还有诸如弹坑、水潭、壕沟、断崖等负(凹)障碍, 此时采用绝对坐标平面的方法进行障碍物区分, 误报率和漏检率较高.因此, 在非结构化环境中, 必须通过分析雷达探测点的相对位置关系来实现对探测区域的外轮廓感知.基于雷达探测点相对关系的感知方法的误报率和漏检率与雷达的点数量和密度密切相关.单位区域内的点密度越高, 识别出来的概率就越大, 准确率就越高.
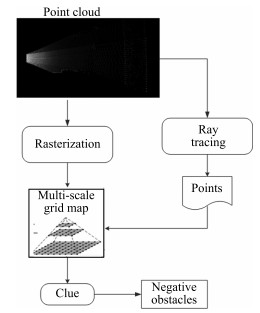
本文重点研究非结构化环境中的负障碍感知问题, 通过双32线激光雷达叠加扫描的方法, 增加车前区域点密度,通过栅格地图投影映射, 空间关联相对探测点, 并抽取栅格地图的统计特征, 再关联点云几何特征, 实现对负障碍关键特征点对的提取, 通过特征点对聚类, 检测出疑似负障碍。该方法已应用在自主车上.使用表明, 方法在非结构化环境下具有优秀的感知效果.
1. 相关工作
负障碍感知是移动机器人环境感知领域的研究重点和难点, 目前的障碍检测大致分为两类, 一类是依靠图像, 可细分为三类: 1)基于先验知识.通过分析障碍的对称性、颜色、阴影、纹理、角点或者边等特性进行障碍检测[1-3].这些方法基于单帧图像, 简单、实时性高, 但是在不利天气条件下, 或者出现与先验不符的障碍时极易误检. 2)基于热成像图像.文献[4]使用热成像图像检测负障碍, 其机理在于负障碍所在区域的温度通常要比其周围环境要低, 但是由于热成像图像只能在夜间检测, 且受天气影响, 也不能很好的解决该问题. 3)文献[5-6]提出了基于立体视觉的检测方法.文献[7]假定图像中的大部分区域属于地面, 基于该假设先从V视差图中得到主要的地面视差, 再进行障碍物检测.立体视觉的问题在于其对车体姿态较为敏感, 当车体姿态发生变化时需要重新校正.
文献[8-12]介绍了另一类基于2D与3D激光雷达的障碍检测方法.相比于相机等二维被动式传感器, 激光雷达能准确测量物体的深度信息且不受光照、天气等影响, 这使得其在UGV的环境感知领域中被广泛使用.文献[13]提出了NODR (Negative obstacle detector)负障碍检测方法, 该方法抽取负障碍的几何特性, 通过训练支持向量机(Support vector machine, SVM)模型对雷达扫描点进行快速分类, 以此找到潜在的负障碍点.文献[14]提出了FFA (Feature fusion based algorithm)与AMFA (Adaptive matching filter based algorithm)负障碍检测方法, 该方法同样是利用SVM进行分类, 并使用贝叶斯估计进行多帧雷达数据的融合关联, 以此提高检测的准确率.但该方法计算量较大, 且基于SVM的分类学习需要大量的学习样本, 而将大量的雷达点分类标记需要消耗大量的时间.
2. 系统架构设计
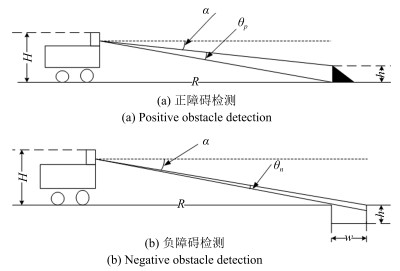
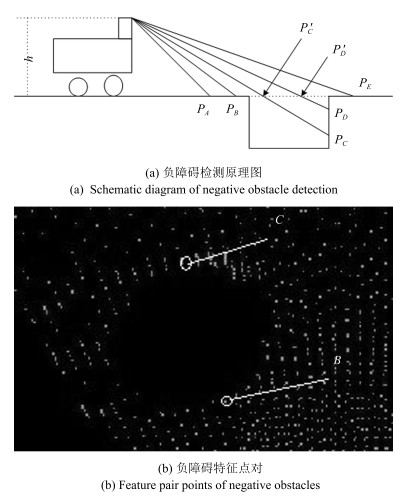
由于负障碍的轮廓隐于地表以下, 与凸出地表的正障碍相比, 负障碍检测难度较大.障碍检测示意图如图 2所示.
正障碍在地表以上(图 2 (a)), 满足tan$(\alpha)=(H-h)/R$, tan$(\alpha +\theta_p)=H/R$, 因为在$H/R$值相当小的情况下, $\alpha$与$\theta_p$的值都很小, 因此$\alpha\approx (H-h)/R$, $\alpha+\theta_p\approx H/R$, 进而有
$ \theta_p\approx \frac{h}{R} $
(1) 负障碍在地表以下(图 2 (b)), 满足tan$(\alpha)=H/(R+w)$, tan$(\alpha +\theta_n)=(H+h)/(R+w)$, 根据相似三角形原理, $h=$ $Hw/R$, 因为$R\gg h$, 故存在$\alpha\approx H/(R+w)$, $\alpha+\theta_n \approx (H$ $+$ $h)/(R+w)$, 进而可知
$ \theta_n \approx \frac{Hw}{R(R+w)} $
(2) 对比式(1)和式(2), $\theta_p$正比于$1/R$, $\theta_n$正比于$1/R^2$, 同等距离下, 负障碍要比正障碍所检测到的有效角度小得多, 负障碍距离越远越难以检测.
无人车使用的单线激光雷达视野太小, 有效的数据点较少, 很难完成负障碍感知的任务.本文使用32线激光雷达, 相对于64线激光雷达, 价格较便宜, 且体积小, 重量轻, 适合不同的安装方式.
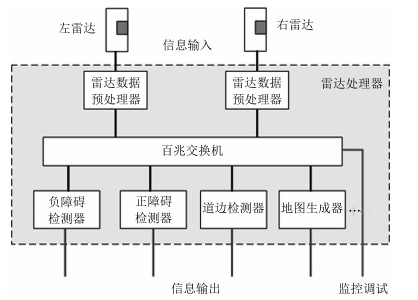
为了提高雷达在车体前进方向的点云密度, 本文采取水平的安装方式.为了解决雷达数据大、数据帧不同步的问题, 采取分布式实时处理架构, 雷达数据由各自独立的数据处理模块采集, 并做坐标转换、噪点过滤等预处理.
2.1 激光雷达安装分析
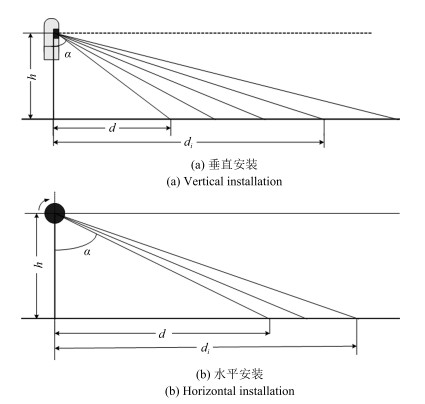
与大多数激光雷达垂直安装方式不同, 本文将两个激光雷达对称的水平安装在UGV两侧.此种安装方式可大大提高激光雷达在车体前进方向上的点云密度, 如图 3所示.
两种安装方式的比较如图 4所示.
由图 4 (a), 在垂直安装方式下, 有
$ \begin{cases} d_i=h \times \tan(\alpha+i\times\Delta \phi), \quad i \in [0, 22] \\ d=h \times \tan(\alpha) \end{cases} $
(3) 其中, $h$是雷达架设高度, $\alpha$是雷达最下方扫描线的扫描角度, $\Delta\phi$为雷达的垂直角分辨率, $d$表示最下方扫描线到雷达的水平距离, $d_i$表示第$i$根扫描线在地上的水平投影距离.第23 $\sim$ 31根扫描线在水平面以上, 不予以考虑.
由图 4 (b), 在水平安装方式下, 有如下关系式:
$ \begin{cases} d_i=h \times{\rm tan}(\alpha+i \times \Delta \beta) \\[2mm] \alpha=\arctan\left(\dfrac{d}{h}\right) \\[2mm] \Delta d_i=d_i-d_{i-1} \end{cases} $
(4) 其中, $d$与$h$是雷达安装参数, $h$是雷达架设高度, $\alpha$为起始扫描角, $d_i$表示零度扫描线在$i$时刻在水平面上的投影距离. $\Delta \beta$是雷达的水平角分辨率, $i \times \Delta \beta$可由雷达直接获取.
表 1列出了雷达安装高度2 m, 在不同距离下, 车体前进方向上, 各个距离区间相邻雷达点扫描间隔.假设雷达在20 m的距离上要感知1 m $\times$ 1 m左右的负障碍, 按照垂直安装方式, 在20 m位置, 相邻扫描点间隔达4.3 m, 而按照水平安装方式, 在20 m处相邻扫描点距离仅为0.55 m.相比之下, 垂直架设方式, 20 m外无法有效感知负障碍.
表 1 相邻扫描点间隔Table 1 Adjacent scanning point interval5 m 10 m 15 m 20 m 25 m 垂直($^\circ$) 0.33 1.20 2.05 4.30 7.16 水平($^\circ$) 0.045 0.15 0.31 0.55 0.85 2.2 坐标转换
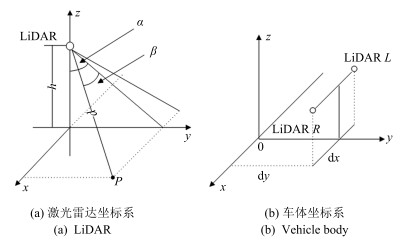
任意$t$时刻, 扫描面与$z$轴的夹角为$\alpha$, 第$i$根扫描线与中心线之间的夹角为$\beta$, 如图 5 (a), 任一扫描点可描述为$p(d, \alpha, \beta)$.在水平安装方式下, 两个雷达平移到车体坐标系下, 如图 5 (b), 三维坐标表示$p(x, y, z)$.其坐标转换公式如下.左雷达
$ \begin{cases} x=(-1) \times d \times \sin\beta_i+ {\rm d}x \\ y=d \times \cos\beta_i \times \sin\alpha+{\rm d}y \\ z=h-d \times \cos\beta_i \times \cos\alpha \end{cases} $
(5) 右雷达
$ \begin{cases} x=d \times \sin\beta_i+{\rm d}x \\ y=(-1) \times d \times \cos\beta_i \times \sin\alpha+{\rm d}y \\ z=h-d \times \cos\beta_i \times \cos\alpha \end{cases} $
(6) 3. 负障碍感知
本文负障碍感知的方法利用统计学特征与几何特征相结合的方式, 从点云数据中提取关键特征点对, 再通过聚类的方式划分出负障碍, 感知过程如图 6所示.
算法分解为如下三个步骤:
步骤1.栅格特征提取:将3D雷达点云投影到2.5D的多尺度栅格, 统计各栅格特征, 并根据特征对栅格标记.
步骤2.特征点对提取:再次遍历点云数据, 结合栅格的统计特征以及负障碍几何特征提取关键特征点对.
步骤3.特征点对聚类:对步骤2中检测出的关键特征点对聚类, 识别负障碍, 并对聚类后的类别进行过滤, 去除噪声、误检等产生的负样本.
3.1 栅格特征提取
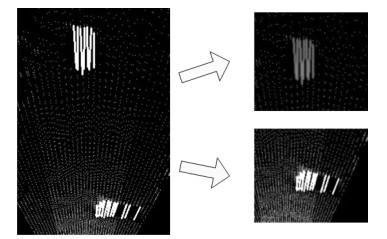
定尺度栅格处理简单、方便, 但是存在数据量与精度的矛盾.栅格尺度太大会降低检测的精度, 太小则会增加计算量, 失去栅格化的意义.而多尺度栅格能很好的解决这一问题.栅格化的过程如图 7所示.
每个小栅格表示为
$ \begin{cases} C_{ij}=\{z_{\max}, z_{\min}, num, label\} \\ label \in \{SLOP, NEG, POS, UNKNOW\} \\ \end{cases} $
(7) 其中, $z_{\max}$与$z_{\min}$分别表示该栅格$Z$轴的最大值与最小值, $num$表示落在该栅格的雷达点数, $label$是该栅格的标记, 其有四个值, 分别表示坡、负障碍、正障碍、未知.在栅格化之后, 根据栅格的统计特征, 对栅格进行标记.
栅格化的过程可以得到扫描点分布的统计信息.在标记过程中, 本文使用了较为松散的约束, 这样可以使得尽量多的栅格被标记成负障碍区域, 这一行为虽然会将部分栅格误标记为负障碍区域, 但是在聚类过程中会被修正.
负障碍特征提取与聚类主要在25 cm $\times$ 25 cm和10 cm $\times$ 10 cm大小的栅格中进行, 由于检测的稳定距离在15米的距离上, 在该距离段下, 25 cm $\times$ 25 cm的栅格最为合适, 待负障碍进入车前10米距离内, 通过10 cm $\times$ 10 cm的栅格进一步细化负障碍的边缘, 为车辆行为规划提供依据.
3.2 特征点对提取
栅格化的步骤, 只是从统计的角度得到每个雷达扫描点所在区域的可能标记, 而不是对栅格地图的最终划分.特征点对检测的目的在于利用栅格的统计学特征结合式(8)描述的几何特征共同检测, 进而确定并定位负障碍区域.
图 8 (a)是特征点对提取的示意图, 检测的目的在于从扫描点中找到$B$、$C$两个特征点对(图 8 (b)), $BC$之间的区域则是负障碍所在的区域, 从图 8可得到以下推断:
1) 若地面相对平整, 按照式(4)可知$t$时刻$\Delta d_{i-1} <$ $\Delta d_i$ $ <$ $\Delta d_{i+1}$, 即$d_{AB} <d_{BC} <d_{CD}$, 式中的距离表示水平距离.但是因为负障碍的存在使得上述关系不再成立, 变为$\Delta d_{i-1}$ < $\Delta d_i <\Delta d_{i+1}$.
2) 由于断层的出现, 导致负障碍背面聚集较多的扫描点, 即$C$、$D$点所在的位置点密度要大于$A$、$B$、$E$点的点密集度.
3) 点$C$的高度要小于点$B$的高度, 亦即负障碍要有一定深度的落差.
根据上述推断可得到负障碍检测的数学模型
$ l_{BC}= \begin{cases} d_{BC}>d_{BA}, \ d_{BC}>d_{CD} \\ I_c>I_b \\ C_z <B_z \end{cases} $
(8) 基于上述模型, 遍历点云数据, 在点云数据中找到所有潜在的负障碍区域的特征点对.
3.3 特征点对聚类
算法检测到的特征点对较为离散, 并不能对各个特征点对进行关联, 最后对检测到的特征点对聚类, 以此划分负障碍区域(图 9).聚类过程如下.
取每个特征点对的中心点$x=[v_0, v_1]^{-1}$构成聚类样本集$G=\{x_1, x_2, \cdots, x_N \}$.
$ \begin{cases} v_0=\dfrac{B_x+C_x}{2} \\[2mm] v_1=\dfrac{B_y+C_y}{2} \end{cases} $
(9) 分类的目标函数为
$ E=\frac{N_1N_2}{N}(\overline x_1 - \overline x_2)^{\rm T}(\overline x_1 - \overline x_2) $
(10) 其中, $N$是样本总数, $N_1$是第一类样本数, $N_2$是第二类样本数, $\overline x_1$, $\overline x_2$是两类样本的均值.
1) 首先将样本分成两类
$ G{_1^{(0)}}=\{x_1, x_2, \cdots, x_N\}, \ \ G{_2^{(0)}}=\phi, \ \ E=0 $
(11) 2) 分别计算把$x_1, x_2, \cdots, x_N$并入$G_2$类时的$E$值, 设当$x_i$并入$G_2$时的$E$值最大, 则把它并入$G_2$得
$ \begin{cases} G{_1^{(1)}}=\{x_1, \cdots, x_{i-1}, x_{i+1}, \cdots, x_N\} \\ G{_1^{(2)}}=\{x_i\}, \ \ E=E(1) \end{cases} $
(12) 3) 若$E(k+1)\ge E(k)$, 则重复上述步骤, 直到某个$E(k)$达到最大值为止.这时最好的分类是$G{_1^k}$共有$N-k$个样本, $G{_2^k}$有$k$个样本. $\overline x_1$, $\overline x_2$的更新公式为
$ \begin{cases} x{_1^{k+1}}= \overline x{_1^k}+ \dfrac{\overline x{_1^k}-x_i}{N{_1^k}-1} \\[2mm] x{_2^{k+1}}= \overline x{_2^k}- \dfrac{ \overline x{_2^k}-x_i}{N{_2^k}+1} \end{cases} $
(13) 4) 取两类样本中离散度与样本数大于一定阈值的类别重复上述步骤, 若找不到则算法终止.
最后, 对得到的类簇进行过滤, 只留下包含样本数大于一定阈值的类簇, 并将其标记为负障碍.
4. 实验与分析
4.1 实验及结果
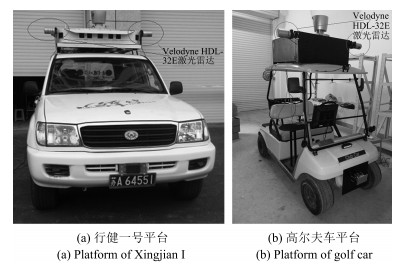
为了验证算法的感知性能, 以及检测的实时性, 算法运行在两个实验平台上:无人自主车"行健一号" (图 10 (a))以及实验平台高尔夫车(图 10 (b)).两辆车的参数如表 2所示.
表 2 实验平台雷达安装参数Table 2 Experimental platform radar installation parameters雷达高度(m) 有效扫描角($^\circ$) 行健一号 2.0 45 高尔夫车 2.1 55 激光雷达共32根扫描线, 垂直扫描角度$-30.67^\circ$ $\sim$ 10.67$^\circ$, 垂直角分辨率1.33$^\circ$, 工作频率10 Hz, 水平角分辨率0.16$^\circ$最大测量距离70 m, 每秒钟有效扫描点达700 000多个.
依据雷达在不同距离上的点云分布密度以及目标负障碍的大小, 将栅格地图划分为三个不同的尺寸, 分别为10 cm $\times$ 10 cm, 25 cm $\times$ 25 cm以及50 cm $\times$ 50 cm, 为了尽可能准确的检测障碍物的形状, 同时减小计算量, 本文的检测主要在横向5米、纵向10米内使用10 cm $\times$ 10 cm的栅格, 纵向10 $\sim$ 30米使用25 cm $\times$ 25 cm的栅格, 纵向30米以外使用50 cm $\times$ 50 cm的栅格.
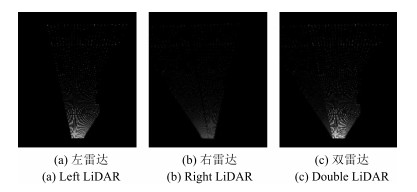
相较于单个激光雷达, 双激光雷达数据量大, 且两个雷达运行不同步, 彼此之间数据帧不同步会产生重影.为解决这一问题, 本文采用分布式实时数据采集与融合架构.如图 11所示, 两个雷达分别连接独立的处理模块, 该模块负责雷达数据的采集与预处理, 并通过陀螺仪信息进行位姿修正.实验结果表明, 该方法大大分解了工作量, 并且有效避免了重影现象.
自主车前进过程中, 车体前方是主要观测区, 两个雷达数据采集的角度区间分别为:左, $\theta \in [\alpha, \pi/2]$; 右, $\theta \in [3\pi/2$, $3\pi/2$ $+$ $\alpha]$.
针对不同的环境本文进行三组实验, 两组非结构化环境以及一组半结构化环境(适应性测试), 选取几类不同的负障碍进行感知.实验1的非结构化环境数据是"跨越险阻2014"无人地面平台挑战赛的真实比赛数据.实验2中, 雷达数据采集过程中并未放置交通锥, 在图像采集过程中放置交通锥做为负障碍位置提示.
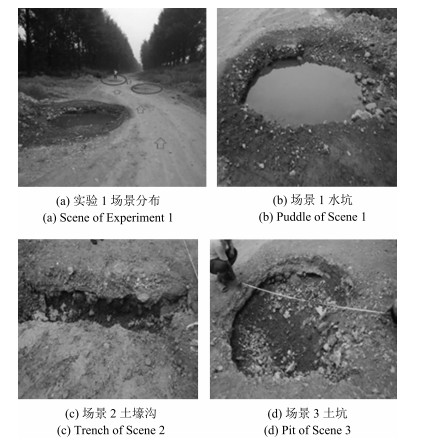
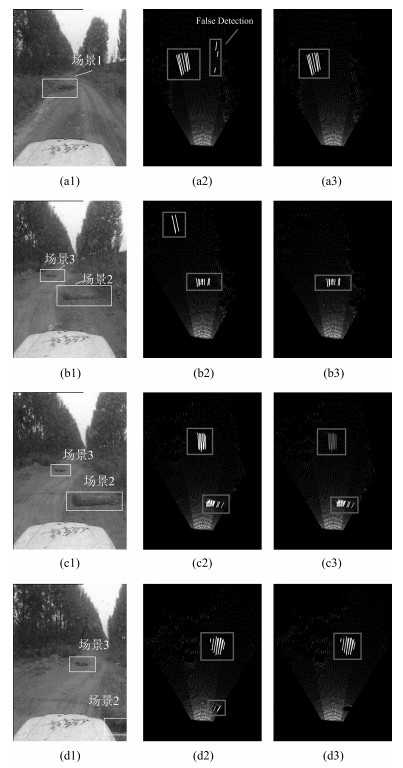
实验1 (图 12)包括三个典型的负障碍:水坑(图 12 (b))、壕沟(图 12 (c))、土坑(图 12 (d)). 图 12 (a)是场景1 $\sim$ 3的远视图, 三个负障碍按照"S"形分布.检测时, 无人自主平台依次绕过场景1 $\sim$ 3, 如图 12中箭头所示.实验1中四个不同位置的检测结果如图 13所示.
实验2 (图 14)是另一组非结构化环境下的负障碍检测结果图.实验包括两个负障碍, 与实验1不同的是两个负障碍分布在起伏路面上, 图 14 (a1)和图 14 (b1)是下坡时的检测示意图, 图 14 (c1)和图 14 (d1)是上坡时的检测示意图.
 图 14 实验2起伏路面负障碍检测Fig. 14 Experiment 2 undulating pavement negative obstacle detection
图 14 实验2起伏路面负障碍检测Fig. 14 Experiment 2 undulating pavement negative obstacle detection在图 13和图 14中, 图 13 (a1) $\sim$ 13 (d1)和图 14 (a1) $\sim$ 14 (d1)是不同位置观测到的实验场景图像, 图 13 (a2) $\sim$ 13 (d2)和图 14 (a2) $\sim$ 14 (d2)是雷达点云数据特征点对检测的结果.每一个特征点对的中间区域表示可能的负障碍区域. 图 13 (a3) $\sim$ 13 (d3)和图 14 (a3) $\sim$ 14 (d3)是特征点对聚类后的结果.
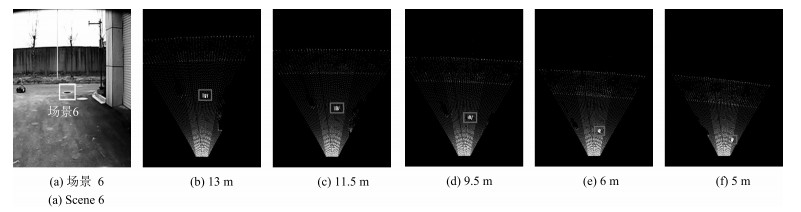
实验3 (图 15)为补充的一组半结构化环境下的负障碍检测实验, 场景为窨井口. 图 15 (a)图是窨井口的远视图, 图 15 (b) $\sim$ 15 (f)分别是在13 m, 11.5 m, 9.5 m, 6 m, 5 m距离下的检测结果.
4.2 结果分析
场景1是非结构化环境下的类圆形具有水、地面高度落差的水坑.在实验中发现, 纯净水面会镜面反射激光束, 导致水体区域的激光雷达无回波信号, 点云缺失, 使得负障碍与未知区域难以辨认; 浑浊的水面激光回波强度与地面回波强度非常接近, 无法区分是普通地面还是水面回波特征.所以对于水面与地面基本无落差的满水坑, 激光雷达无法实现对水坑的辨别.本文水坑由于并未完全灌满水, 具有一定的负障碍轮廓特征, 方法在远距离能够有效地检测, 而在近距离下会发生漏检.
实验中, 特征点对检测的过程会引入部分误检, 如图 13 (a2)中长矩形所示.大部分的误检特征点对并无分布规律, 其可能是由雷达系统误差或误检所致, 通过聚类可以有效的排除这些噪点, 如图 13 (a3)所示.
场景2与场景3是两个不同尺寸的负障碍, 形状与大小各异.由于两个负障碍较近, 在各自的检测中都有部分检测到另一个, 如图 12 (b2)和图 12(d2), 但是因为检测到的特征点对较少而在聚类时被排除, 如图 13 (b3)和图 13 (d3). 图 14 (c1)中同时包含了两个负障碍, 本文的方法不仅成功检测, 而且能正确区分.
实验2中的场景4和场景5 (图 14 (a1) $\sim$ 14 (d1)), 是车体在上、下坡时的检测结果.不同于平缓路面, 上下坡时车体发生倾斜, 下坡时, 车体呈俯视状态, 同等距离下探测到的深度更深, 上坡时则相反.车体的倾斜对检测结果存在一定的影响, 俯视状态的检测结果要略优于仰视状体下的检测结果.
场景6 (图 15 (a)所示的窨井口)是半结构化道路下的一个负障碍,尺寸小于上述几个场景, 圆形的轮廓使得其边缘不易检测, 越靠近边缘, 检测的难度越大.
4.3 性能分析
表 3给出了六个场景的检测参数和检测结果.初次标记距离指在靠近负障碍的过程中, 负障碍$80 \%$以上区域被检测到时的距离, 稳定标记距离指连续5帧以上都能正确检测时的距离.根据表格数据, 宽度在1 m以上的负障碍, 本文方法在15 m远即可检测, 以无人车野外最大30 km/h的行驶速度计算, 其反应时间为1.8 s左右, 完全能够满足地面无人自主平台的需求, 具有实用性.
表 3 实验场景参数与检测结果Table 3 Parameters of experiments and detection results环境类型 检测平台 尺寸 深度 初次标记距离 稳定标记距离 场景1 非结构化 行健一号 3.5 m $\times$ 3 m 0.3 m 20 m 17 m 场景2 非结构化 行健一号 1.5 m $\times$ 4 m 0.5 m 16 m 15 m 场景3 非结构化 行健一号 2.3 m $\times$ 1.7 0.6 m 22 m 21 m 场景4上坡 非结构化 行健一号 0.5 m $\times$ 1 m 0.5 m 15 m 13 m 场景4下坡 非结构化 行健一号 0.5 m $\times$ 1 m 0.5 m 16 m 16 m 场景5上坡 非结构化 行健一号 1 m $\times$ 1 m 0.5 m 15 m 13 m 场景5下坡 非结构化 行健一号 1 m $\times$ 1 m 0.5 m 17 m 15 m 场景6 半结构化 高尔夫车 直径1 m 1 m 14 m 13 m 实验均运行在Cortex-A8处理器, 1 GHz, 256 MB RAM的ARM环境下, 单帧处理时间在15 ms左右. 表 4列出了部分主流负障碍检测方法的运行时间, 部分数据来源于文献[14], 相比较, 本文方法具有高实时性.
表 4 算法时间对比Table 4 Algorithm time contrast本文方法已成功应用在两辆无人自主车上, 能够稳定并有效地进行负障碍检测, 表明本文的方法具有良好的可靠性.
5. 结论
本文提出了一种新的非结构化环境下基于双激光雷达感知负障碍的方法.该方法由硬件系统架构以及负障碍检测算法两部分组成.通过调整雷达安装方式提高点云密度; 利用分布式数据处理架构, 分解了工作量, 提高了检测的实时性.检测算法结合了负障碍的统计学特征以及空间几何特征, 做多特征关联进行检测, 最后通过聚类对负障碍加以区分和标记, 提高了检测性能.实验结果表明, 本文的方法具有较高实时性与可靠性, 在无人车上的应用也说明了该方法的实用性, 能够满足无人自主平台的需求.
由于本文研究对象在相关研究领域较为小众化, 本文方法的普适性、可靠性等技术指标还需要大样本的实验数据进行进一步验证和提升, 在后续的研究中, 关注实验样本库的构建, 进一步对算法的性能进行改进.
-
图 14 实验2起伏路面负障碍检测
Fig. 14 Experiment 2 undulating pavement negative obstacle detection
表 1 相邻扫描点间隔
Table 1 Adjacent scanning point interval
5 m 10 m 15 m 20 m 25 m 垂直($^\circ$) 0.33 1.20 2.05 4.30 7.16 水平($^\circ$) 0.045 0.15 0.31 0.55 0.85  下载: 导出CSV
下载: 导出CSV
表 2 实验平台雷达安装参数
Table 2 Experimental platform radar installation parameters
雷达高度(m) 有效扫描角($^\circ$) 行健一号 2.0 45 高尔夫车 2.1 55
下载: 导出CSV
表 3 实验场景参数与检测结果
Table 3 Parameters of experiments and detection results
环境类型 检测平台 尺寸 深度 初次标记距离 稳定标记距离 场景1 非结构化 行健一号 3.5 m $\times$ 3 m 0.3 m 20 m 17 m 场景2 非结构化 行健一号 1.5 m $\times$ 4 m 0.5 m 16 m 15 m 场景3 非结构化 行健一号 2.3 m $\times$ 1.7 0.6 m 22 m 21 m 场景4上坡 非结构化 行健一号 0.5 m $\times$ 1 m 0.5 m 15 m 13 m 场景4下坡 非结构化 行健一号 0.5 m $\times$ 1 m 0.5 m 16 m 16 m 场景5上坡 非结构化 行健一号 1 m $\times$ 1 m 0.5 m 15 m 13 m 场景5下坡 非结构化 行健一号 1 m $\times$ 1 m 0.5 m 17 m 15 m 场景6 半结构化 高尔夫车 直径1 m 1 m 14 m 13 m
下载: 导出CSV
-
[1] 方辉, 杨明, 杨汝清.基于地面特征点匹配的无人驾驶车全局定位.机器人, 2010, 32(1):55-60 http://www.doc88.com/p-69211991890.htmlFang Hui, Yang Ming, Yang Ru-Qing. Ground feature point matching based global localization for driverless vehicles. Robot, 2010, 32(1):55-60 http://www.doc88.com/p-69211991890.html [2] Bucher T, Curio C, Edelbrunner J, Igel C, Kastrup D, Leefken I, Lorenz G, Steinhage A, von Seelen W. Image processing and behavior planning for intelligent vehicles. IEEE Transactions on Industrial Electronics, 2003, 50(1):62-75 doi: 10.1109/TIE.2002.807650 [3] Betke M, Haritaoglu E, Davis L S. Real-time multiple vehicle detection and tracking from a moving vehicle. Machine Vision and Applications, 2000, 12(2):69-83 doi: 10.1007/s001380050126 [4] Matthies L, Rankin A. Negative obstacle detection by thermal signature. In:Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas, NV, USA:IEEE, 2003, 1:906-913 [5] Dubbelman G, van der Mark W, van den Heuvel J C, Groen F C A. Obstacle detection during day and night conditions using stereo vision. In:Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA:IEEE, 2007. 109-116 [6] Hadsell R, Sermanet P, Ben J, Erkan A, Scoffier M, Kavukcuoglu K, Muller U, LeCun Y. Learning long-range vision for autonomous off-road driving. Journal of Field Robotics, 2009, 26(2):120-144 doi: 10.1002/rob.v26:2 [7] Cong Y, Peng J J, Sun J, Zhu L L, Tang Y D. V-disparity based UGV obstacle detection in rough outdoor terrain. Acta Automatica Sinica, 2010, 36(5):667-673 https://www.sciencedirect.com/science/article/pii/S187410290960029X [8] Larson J, Trivedi M, Bruch M. Off-Road Terrain Traversability Analysis and Hazard Avoidance for UGVs. Department of Electrical Engineering, University of California, San Diego, USA, 2011. [9] Heckman N, Lalonde J F, Vandapel N, Hebert M. Potential negative obstacle detection by occlusion labeling. In:Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA:IEEE, 2007. 2168-2173 [10] Sinha A, Papadakis P. Mind the gap:detection and traversability analysis of terrain gaps using LIDAR for safe robot navigation. Robotica, 2013, 31(7):1085-1101 doi: 10.1017/S0263574713000349 [11] Tingbo H. Research on Stereo Vision Algorithms and Their Application in Obstacle Detection for ALV[Ph.D. dissertation], National University of Defense Technology, China, 2012. [12] Marder-Eppstein E, Berger E, Foote T, Gerkey B, Konolige K. The office marathon:robust navigation in an indoor office environment. In:Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA). Anchorage, AK, USA:IEEE, 2010. 300-307 [13] Larson J, Trivedi M. Lidar based off-road negative obstacle detection and analysis. In:Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC). Washington DC, USA:IEEE, 2011. 192-197 [14] Shang E K, An X J, Wu T, Hu T B, Yuan Q P, He H G. LiDAR based negative obstacle detection for field autonomous land vehicles. Journal of Field Robotics, 2016, 33(5):591-617 doi: 10.1002/rob.2016.33.issue-5 -

 下载:
下载:

计量
- 文章访问数: 2632
- HTML全文浏览量: 747
- PDF下载量: 618
- 被引次数: 0
