

Negative Obstacle Perception in Unstructured Environment With Double Multi-beam LiDAR
-
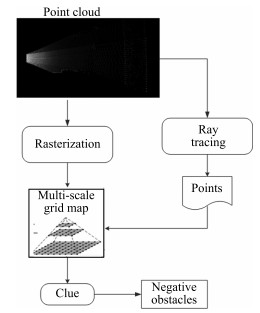
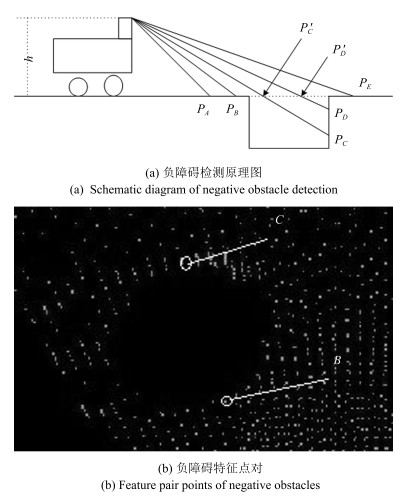
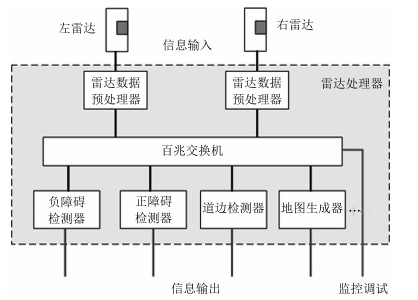
摘要: 负障碍感知是非结构化环境下的难点问题,本文针对该问题提出一种新的基于双多线激光雷达(Light detection and ranging,LiDAR)的感知方法.采用分布嵌入式架构对双激光雷达数据进行同步采集与实时处理,将雷达点云映射到多尺度栅格,统计栅格的点云密度与相对高度等特征并标记,从点云数据提取负障碍几何特征,通过将栅格的统计特征与负障碍的几何特征做多特征关联找到关键特征点对,将特征点对聚类并过滤,识别出负障碍.方法不受地面平整度影响,已成功应用在无人驾驶车上.使用表明该方法具有较高的实时性和可靠性,在非结构化环境下具有良好的感知效果.Abstract: Negative obstacle perception is a difficult problem in unstructured environment, and a new negative obstacle perception algorithm in unstructured environment with double multi-beam light detection and ranging (LiDAR) is proposed. Firstly, a distributed embedded architecture for LiDAR data acquisition and processing is designed. Secondly, LiDAR points are projected to multi-scale gird maps and points density as well as relative height of each cell is computed, with each cell marked according to the feature. Then the geometric feature of negative obstacles is extracted from point cloud, the key points in pair are searched with both statistical characteristics and geometric features. Finally, clustering algorithm is used to recognize negative obstacles. The algorithm does not depend on the flatness of the ground and has been successfully applied to an unmanned ground vehicle. The application shows that the algorithm is real-time, reliable and has good detection ability.1) 本文责任编委 李平
-

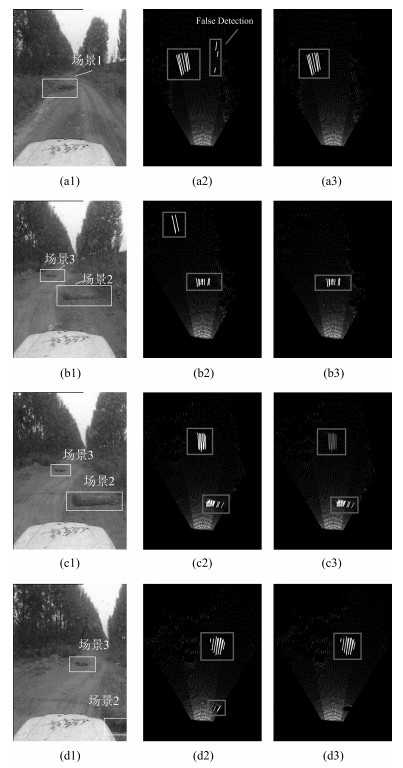
图 14 实验2起伏路面负障碍检测
Fig. 14 Experiment 2 undulating pavement negative obstacle detection
表 1 相邻扫描点间隔
Table 1 Adjacent scanning point interval
5 m 10 m 15 m 20 m 25 m 垂直($^\circ$) 0.33 1.20 2.05 4.30 7.16 水平($^\circ$) 0.045 0.15 0.31 0.55 0.85  下载: 导出CSV
下载: 导出CSV
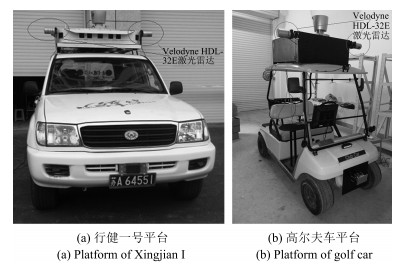
表 2 实验平台雷达安装参数
Table 2 Experimental platform radar installation parameters
雷达高度(m) 有效扫描角($^\circ$) 行健一号 2.0 45 高尔夫车 2.1 55
下载: 导出CSV
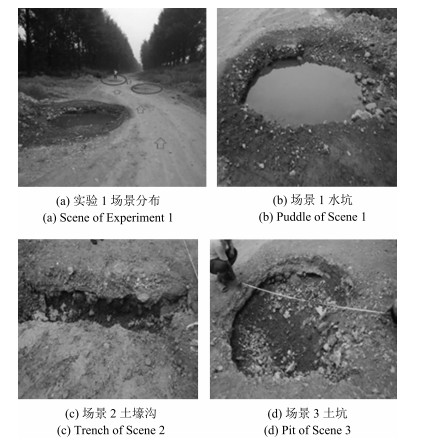
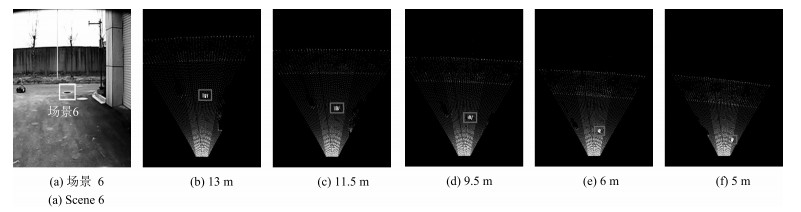
表 3 实验场景参数与检测结果
Table 3 Parameters of experiments and detection results
环境类型 检测平台 尺寸 深度 初次标记距离 稳定标记距离 场景1 非结构化 行健一号 3.5 m $\times$ 3 m 0.3 m 20 m 17 m 场景2 非结构化 行健一号 1.5 m $\times$ 4 m 0.5 m 16 m 15 m 场景3 非结构化 行健一号 2.3 m $\times$ 1.7 0.6 m 22 m 21 m 场景4上坡 非结构化 行健一号 0.5 m $\times$ 1 m 0.5 m 15 m 13 m 场景4下坡 非结构化 行健一号 0.5 m $\times$ 1 m 0.5 m 16 m 16 m 场景5上坡 非结构化 行健一号 1 m $\times$ 1 m 0.5 m 15 m 13 m 场景5下坡 非结构化 行健一号 1 m $\times$ 1 m 0.5 m 17 m 15 m 场景6 半结构化 高尔夫车 直径1 m 1 m 14 m 13 m
下载: 导出CSV
-
[1] 方辉, 杨明, 杨汝清.基于地面特征点匹配的无人驾驶车全局定位.机器人, 2010, 32(1):55-60 http://www.doc88.com/p-69211991890.htmlFang Hui, Yang Ming, Yang Ru-Qing. Ground feature point matching based global localization for driverless vehicles. Robot, 2010, 32(1):55-60 http://www.doc88.com/p-69211991890.html [2] Bucher T, Curio C, Edelbrunner J, Igel C, Kastrup D, Leefken I, Lorenz G, Steinhage A, von Seelen W. Image processing and behavior planning for intelligent vehicles. IEEE Transactions on Industrial Electronics, 2003, 50(1):62-75 doi: 10.1109/TIE.2002.807650 [3] Betke M, Haritaoglu E, Davis L S. Real-time multiple vehicle detection and tracking from a moving vehicle. Machine Vision and Applications, 2000, 12(2):69-83 doi: 10.1007/s001380050126 [4] Matthies L, Rankin A. Negative obstacle detection by thermal signature. In:Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas, NV, USA:IEEE, 2003, 1:906-913 [5] Dubbelman G, van der Mark W, van den Heuvel J C, Groen F C A. Obstacle detection during day and night conditions using stereo vision. In:Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA:IEEE, 2007. 109-116 [6] Hadsell R, Sermanet P, Ben J, Erkan A, Scoffier M, Kavukcuoglu K, Muller U, LeCun Y. Learning long-range vision for autonomous off-road driving. Journal of Field Robotics, 2009, 26(2):120-144 doi: 10.1002/rob.v26:2 [7] Cong Y, Peng J J, Sun J, Zhu L L, Tang Y D. V-disparity based UGV obstacle detection in rough outdoor terrain. Acta Automatica Sinica, 2010, 36(5):667-673 https://www.sciencedirect.com/science/article/pii/S187410290960029X [8] Larson J, Trivedi M, Bruch M. Off-Road Terrain Traversability Analysis and Hazard Avoidance for UGVs. Department of Electrical Engineering, University of California, San Diego, USA, 2011. [9] Heckman N, Lalonde J F, Vandapel N, Hebert M. Potential negative obstacle detection by occlusion labeling. In:Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA:IEEE, 2007. 2168-2173 [10] Sinha A, Papadakis P. Mind the gap:detection and traversability analysis of terrain gaps using LIDAR for safe robot navigation. Robotica, 2013, 31(7):1085-1101 doi: 10.1017/S0263574713000349 [11] Tingbo H. Research on Stereo Vision Algorithms and Their Application in Obstacle Detection for ALV[Ph.D. dissertation], National University of Defense Technology, China, 2012. [12] Marder-Eppstein E, Berger E, Foote T, Gerkey B, Konolige K. The office marathon:robust navigation in an indoor office environment. In:Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA). Anchorage, AK, USA:IEEE, 2010. 300-307 [13] Larson J, Trivedi M. Lidar based off-road negative obstacle detection and analysis. In:Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC). Washington DC, USA:IEEE, 2011. 192-197 [14] Shang E K, An X J, Wu T, Hu T B, Yuan Q P, He H G. LiDAR based negative obstacle detection for field autonomous land vehicles. Journal of Field Robotics, 2016, 33(5):591-617 doi: 10.1002/rob.2016.33.issue-5 -

 下载:
下载:


图(15) / 表(4)
计量
- 文章访问数: 2869
- HTML全文浏览量: 940
- PDF下载量: 620
- 被引次数: 0
