

Rehabilitation Robot Compliance Interaction Control With Successive Approximation Vector Field
-
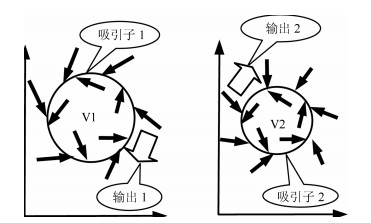
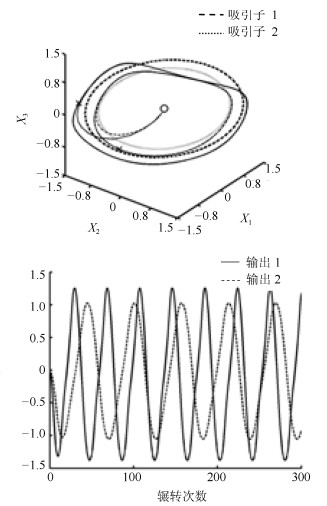
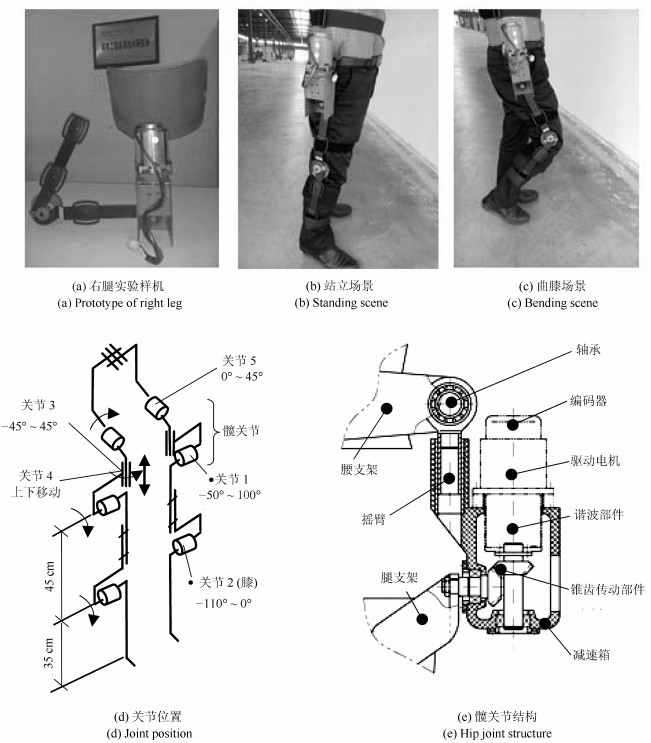
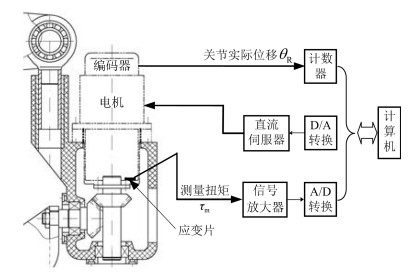
摘要: 为了实现康复机器人的主动柔顺交互,提出了一种基于矢量场逐次逼近的控制模型;设计了矢量场逐次逼近系统,可输出机器人关节期望位移,该输出能与输入的扭矩、表面肌电及脑电等信号在振幅、频率和相位上保持同步,且通过调节遗忘因子参数值,可改变主动柔顺交互的积极性;利用自行设计的穿着型下肢康复机器人样机进行柔顺辅助实验,以验证所提出控制模型的有效性;通过FFT(Fast Fourier transformation)频谱对机器人关节扭矩的组成成分进行了分析,并采用基于最小二乘法的参数辨识方法实施了重力补偿,以便康复机器人实时控制.实验结果表明,该控制模型对于实现康复机器人与人之间的柔顺交互是有效的.Abstract: In order to realize active compliant interaction for rehabilitation robots, we propose a control model based on a successive approximation method of vector field. A system in the vector field with successive approximation is designed to output the desired trajectory of each robot joint. The amplitude, frequency and phase of the output can synchronize with the torque, surface electromyogram and electroencephalogram information of the input signal; the activity of compliant interaction can be changed by adjusting a forgetting factor in the system. Based on a self-designed wearing type lower limb rehabilitation robot prototype, a compliance assistant experiment is presented by adopting the proposed control model. The components of the joint torque for the robot are analyzed using the fast Fourier transformation (FFT) spectrum analysis method, and gravity compensation for the rehabilitation robot joints is realized for real-time control by using parameter identification based least square method. Experiment results indicate that the control method is effective for the compliant interaction between rehabilitation robot and human.1) 本文责任编委 王启宁
-
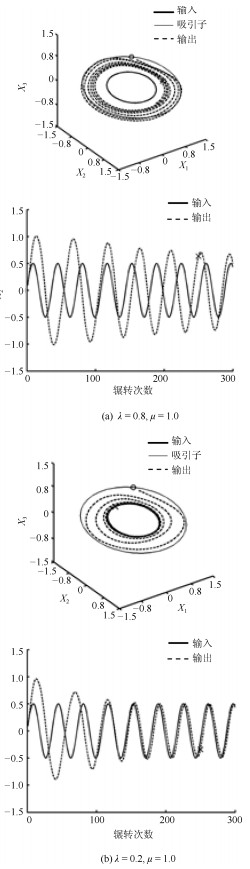
图 6 取不同参数$\lambda $和$\mu$时输入输出信号
Fig. 6 In-out signal with different $\lambda$ and $\mu $ parameters
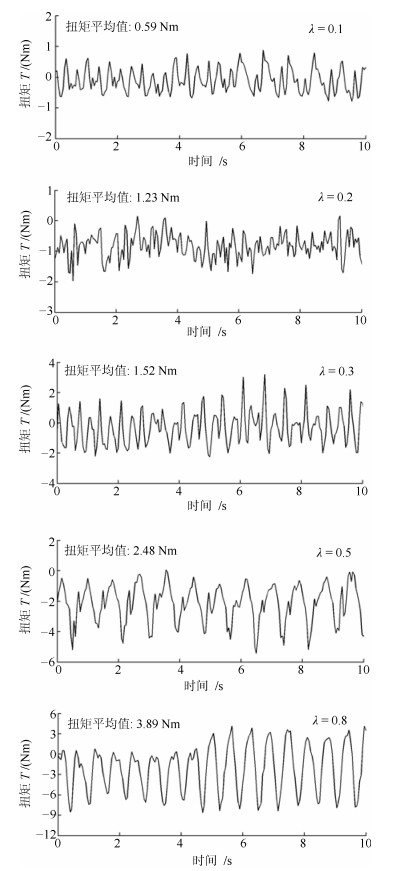
图 14 $\lambda $变化时辅助扭矩结果
Fig. 14 Result of auxiliary torque with modified $\lambda $ value
表 1 参数辨识结果
Table 1 Result of parameter identification
关节$k$ $m_k { }^kp_{kx}$
(kg·m)$m_k { }^kp_{ky}$
(kg·m)$m_k { }^kp_{kz}$
(kg·m)$m_k$
(kg)髋关节1 0.0375 $-$0.0020 $-$0.0026 0.1668 膝关节2 0.0196 0.0015 0.0010 0.1120  下载: 导出CSV
下载: 导出CSV
-
[1] 史小华, 王洪波, 孙利, 高峰, 徐震.外骨骼型下肢康复机器人结构设计与动力学分析.机械工程学报, 2014, 50(3):41-48 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201403006Shi Xiao-Hua, Wang Hong-Bo, Sun Li, Gao Feng, Xu Zhen. Design and dynamic analysis of an exoskeletal lower limbs rehabilitation robot. Journal of Mechanical Engineering, 2014, 50(3):41-48 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201403006 [2] 方涛涛, 韩建海, 王会良, 尤爱民.新型卧式下肢康复训练机器人机械系统设计.中国康复医学杂志, 2013, 28(3):246-250 doi: 10.3969/j.issn.1001-1242.2013.03.012Fang Tao-Tao, Han Jian-Hai, Wang Hui-Liang, You Ai-Min. New horizontal lower limb rehabilitative robot. Chinese Journal of Rehabilitation Medicine, 2013, 28(3):246-250 doi: 10.3969/j.issn.1001-1242.2013.03.012 [3] Freivogel S, Schmalohr D Mehlmolz J. Improved walking ability and reduced therapeutic stress with all electromechanical gait device. Journal of Rehabilitation Medicine, 2009, 41(9):734-739 doi: 10.2340/16501977-0422 [4] Cudb Y. Liberty autonomy independence. Engineering Insight, 2011, 12(1):8-14 http://d.old.wanfangdata.com.cn/Periodical/ybxyxb200509007 [5] 许祥, 侯丽雅, 黄新燕, 章维一.基于外骨骼的可穿戴式上肢康复机器人设计与研究.机器人, 2014, 36(2):147-155 http://d.old.wanfangdata.com.cn/Periodical/jqr201402003Xu Xiang, Hou Li-Ya, Huang Xin-Yan, Zhang Wei-Yi. Design and research of a wearable robot for upper limbs rehabilitation based on exoskeleton. Robot, 2014, 36(2):147-155 http://d.old.wanfangdata.com.cn/Periodical/jqr201402003 [6] 王伟, 李岩, 吴华, 顾旭东, 姚云海, 傅建明, 李建华.下肢康复机器人训练对急性脑卒中患者下肢运动功能的影响.中华物理医学与康复杂志, 2013, 35(6):464-467 doi: 10.3760/cma.j.issn.0254-1424.2013.06.008Wang Wei, Li Yan, Wu Hua, Gu Xu-Dong, Yao Yun-Hai, Fu Jian-Ming, Li Jian-Hua. Robot-assisted lower limb rehabilitation of hemiplegia. Chinese Journal of Physical Medicine and Rehabilitation, 2013, 35(6):464-467 doi: 10.3760/cma.j.issn.0254-1424.2013.06.008 [7] Krishnan C, Kotsapouikis D, Dhaher Y Y, Rymer W Z. Reducing robotic guidance during robot-assisted gait training improves gait function:a case report on a stroke survivor. Archives of Physical Medicine and Rehabilitation, 2013, 94(6):1202-1206 doi: 10.1016/j.apmr.2012.11.016 [8] Klamroth-Marganska V, Blanco J, Campen K, Curt A, Dietz V, Ettlin T, Felder M, Fellinghauer B, Guidali M, Kollmar A, Luft A, Nef T, Schuster-Amft C, Stahel W, Riener R. Three-dimensional, task-specific robot therapy of the arm after stroke:a multicentre, parallel-group randomised trial. The Lancet Neurology, 2014, 13(2):159-166 doi: 10.1016/S1474-4422(13)70305-3 [9] Hu J, Hou Z G, Zhang F, Chen Y X, Li P F. Training strategies for a lower limb rehabilitation robot based on impedance control. In: Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. San Diego, USA: IEEE, 2012. 6032-6035 [10] Pons J L. Wearable Robots: Biomechatronic Exoskeletons. Hoboken, USA: John Wiley and Sons, 2008. 127-149 [11] 佟丽娜, 侯增广, 彭亮, 王卫群, 陈翼雄, 谭民.基于多路sEMG时序分析的人体运动模式识别方法.自动化学报, 2014, 40(5):810-821 http://www.aas.net.cn/CN/abstract/abstract18349.shtmlTong Li-Na, Hou Zeng-Guang, Peng Liang, Wang Wei-Qun, Chen Yi-Xiong, Tan Min. Multi-channel sEMG time series analysis based human motion recognition method. Acta Automatica Sinica, 2014, 40(5):810-821 http://www.aas.net.cn/CN/abstract/abstract18349.shtml [12] Artoni F, Chisari C, Menicucci D, Fanciullacci C, Micera S. REMOV: EEG artifacts removal methods during lokomat lower-limb rehabilitations. In Proceedings of the 4th RAS & EMBS International Conference on Biomedical Robotica and Biomechatronica. Rome, Italy: IEEE, 2012. 992-997 [13] Hogan N. Impedance control: an approach to manipulation. In: Proceedings of the 1984 American Control Conference. San Diego, USA: IEEE, 1984. 304-313 [14] Riener R, Lünenburger L, Jezernik S, Dietz V. Patient-cooperative strategies for robot-aided treadmill training:first experimental results. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2005, 13(3):380-394 doi: 10.1109/TNSRE.2005.848628 [15] 孙洪颖, 张立勋, 李长肚.卧式下肢康复机器人主动柔顺控制实验研究.高技术通讯, 2011, 21(6):624-628 doi: 10.3772/j.issn.1002-0470.2011.06.012Sun Hong-Ying, Zhang Li-Xun, Li Chang-Sheng. Research on active compliance control and experimentation of a horizontal lower limbs rehabilitation robot. Chinese High Technology Letters, 2011, 21(6):624-628 doi: 10.3772/j.issn.1002-0470.2011.06.012 [16] 徐国政, 宋爱国, 李会军.基于模糊推理的上肢康复机器人自适应阻抗控制.东南大学学报, 2009, 39(1):156-160 http://d.old.wanfangdata.com.cn/Periodical/dndxxb200901030Xu Guo-Zheng, Song Ai-Guo, Li Hui-Jun. Fuzzy-based adaptive impedance control for upper-limb rehabilitation robot. Journal of Southeast University, 2009, 39(1):156-160 http://d.old.wanfangdata.com.cn/Periodical/dndxxb200901030 [17] Yu J Z, Tan M, Chen J, Zhang J W. A survey on CPG insp-ired control models and system implementation. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(3):441-456 doi: 10.1109/TNNLS.2013.2280596 [18] 张益军, 朱庆保, 田恩刚.实现CPG模型的细胞神经网络的分支分析方法.控制理论与应用, 2006, 23(3):362-366 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200603007Zhang Yi-Jun, Zhu Qing-Bao, Tian En-Gang. Method of bifurcation analysis of cellular neural network for CPG models. Control Theory & Applications, 2006, 23(3):362-366 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200603007 [19] Ajallooeian M, van den Kieboom J, Mukovskiy A, Giese M A, Ijspeert A J. A general family of morphed nonlinear phase oscillators with arbitrary limit cycle shape. Physica D:Nonlinear Phenomena, 2013, 263:41-56 doi: 10.1016/j.physd.2013.07.016 [20] 吴德明, 谢光辉, 王光建.实现人身和机器人交流的神经振动子控制算法.控制理论与应用, 2015, 32(5):695-702 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201505016Wu De-Ming, Xie Guang-Hui, Wang Guang-Jian. Control algorithm of neural oscillator for physical human-robot interaction. Control Theory & Applications, 2015, 32(5):695-702 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201505016 [21] 彭亮, 侯增广, 王卫群.康复机器人的同步主动交互控制与实现.自动化学报, 2015, 41(11):1837-1846 http://www.aas.net.cn/CN/abstract/abstract18759.shtmlPeng Liang, Hou Zeng-Guang, Wang Wei-Qun. Synchronous active interaction control and its Iimplementation for a rehabilitation robot. Acta Automatica Sinica, 2015, 41(11):1837-1846 http://www.aas.net.cn/CN/abstract/abstract18759.shtml [22] 谢光辉, 杨治平, 王光建.矢量场逐次迭代的人——机身体交流控制.中国机械工程, 2014, 25(17):2337-2343 doi: 10.3969/j.issn.1004-132X.2014.17.013Xie Guang-Hui, Yang Zhi-Pin, Wang Guang-Jian. Control algorithm of successive iteration of vector field for physical human-robot interaction. China Mechanical Engineering, 2014, 25(17):2337-2343 doi: 10.3969/j.issn.1004-132X.2014.17.013 [23] Okada M, Nakamura D, Nakamura Y. On-line and hierarchical design methods of dynamics based information processing system. In: Proceeding of the 2003 IEEE/-RSJ International Conference on Intelligent Robots and Systems. Las Vegas, Nevada, USA: IEEE, 2003: 126-142 [24] Hashimoto M, Kiyosawa Y, Hirabayashi H, Paul R P. A joint torque sensing technique for robots with harmonic drives. In: Proceedings of the IEEE International Conference on Robotics and Automation. Sacramento, CA, USA: IEEE, 1991. 1034-1039 -

 下载:
下载:

图(14) / 表(1)
计量
- 文章访问数: 1746
- HTML全文浏览量: 315
- PDF下载量: 932
- 被引次数: 0
