

-
摘要: 本文旨在讨论智联网(Internet of minds,IoM)的基本概念,核心问题和关键平台技术.首先阐述智联网概念的智能时代发展需求和科学哲学思想基础,然后阐述智联网技术的背景、定义、实质,及其实现协同认知智能的目标,并举例说明其前沿应用领域,包括物理信息社会系统、软件定义系统及流程、工业智联网.接下来探讨智联网的核心问题:知识的获取、知识的协同表征和传递、以及知识的关联和协同运行.最后简单描述了智联网的关键平台技术,包括虚实平行的平台体系和基于互联网、物联网、区块链和软件定义网络的社会化通信计算平台,为分布式、自组织、自运行的安全智联网系统提供基础设施.Abstract: This paper aims to provide a blueprint for Internet of minds (IoM), discussing its concept, issues and platforms. We begin with the social and philosophical foundations for IoM, then its background is illustrated along with its concept, definition, essence and its nature of coordinative cognitive intelligence, as well as cyber-physical-social-systems (CPSS), software-defined systems (SDS), and industrial IoM being the three exemplary frontier application areas. We expound the core issues of IoM, including acquisition of knowledge, coordinative representation and delivery of knowledge, and relation and coordinative operation of knowledge. We also describe IoM's key platform technology, including real-virtual parallel platform, and social computing and communication architecture based on Internet, Internet of things, blockchain, and software-defined networks, which provides the foundation of a decentralized, autonomous, self-organized, and secured IoM infrastructure and applications.1) 本文责任编委 刘德荣
-
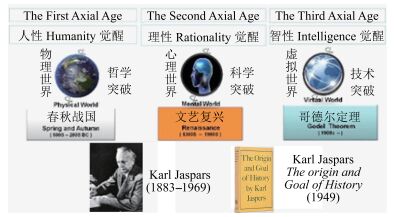
图 1 广义雅斯贝思的“轴心时代”:三个世界与三个轴心时代
Fig. 1 Generalized Jasper's axial ages: three worlds and three axial ages
-
[1] 王飞跃.新IT与新轴心时代:未来的起源与目标.探索与争鸣, 2017年第10期:23-27 [2] 王飞跃. 面向人机物一体化CPSS的控制发展: 知识自动化的挑战与机遇. 见: 中国自动化大会暨自动化领域协同创新大会. 长沙: 中国自动化学会, 2013. [3] Wang F Y. The emergence of intelligent enterprises:from CPS to CPSS. IEEE Intelligent Systems, 2010, 25(4):85-88 doi: 10.1109/MIS.2010.104 [4] 王飞跃, 张俊, 王晓.知识计算和知识自动化:新轴心时代的核心需求.张江科技评论, 2017, (4):25-27 http://bbs.sciencenet.cn/blog-2374-1071599.html [5] 王飞跃. 迈向知识自动化. 中国科学报, 2013[Online], available: http://www.cas.cn/xw/zjsd/201401/t20140103_4009925.shtml, October 1, 2017 [6] 赵立权. 粒度计算的模型研究[博士学位论文], 安徽大学, 中国, 2007.Zhao Li-Quan. Study on the Model Granular Computing[Ph.D. dissertation], Anhui Universit, China, 2007. [7] 王飞跃.从社会计算到社会制造:一场即将来临的产业革命.中国科学院院刊, 2012, 27(6):658-669 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=kyyx201206001&dbname=CJFD&dbcode=CJFQWang Fei-Yue. From social computing to social manufacturing:the coming industrial revolution and new frontier in cyber-physical-social space. Bulletin of Chinese Academy of Sciences, 2012, 27(6):658-669 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=kyyx201206001&dbname=CJFD&dbcode=CJFQ [8] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtmlWang Fei-Yue. Software-defined systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtml [9] Zhu W, Wang F Y. The fourth type of covering-based rough sets. Information Sciences, 2012, 201(19):80-92 http://www.sciencedirect.com/science/article/pii/S002002551200045X [10] 马伯宁. 空间数据多尺度建模关键技术研究[博士学位论文], 国防科学技术大学, 中国, 2014.Ma Bo-Ning. Research on Spatial Data Multi-scale Modeling[Ph.D. dissertation], National University of Defense Technology, China, 2014. [11] 王飞跃, 莫红.关于二型模糊集合的一些基本问题.自动化学报, 2017, 43(7):1114-1141 http://www.aas.net.cn/CN/abstract/abstract19087.shtmlWang Fei-Yue, Mo Hong. Some fundamental issues on type-2 fuzzy sets. Acta Automatica Sinica, 2017, 43(7):1114-1141 http://www.aas.net.cn/CN/abstract/abstract19087.shtml [12] Zhang L, Zhang B. Quotient Space based Problem Solving A Theoretical Foundation of Granular Computing. Burlington:Elsevier Science, 2014. http://dl.acm.org/citation.cfm?id=2602436 [13] 徐计, 王国胤, 于洪.基于粒计算的大数据处理.计算机学报, 2015, 38(8):1497-1517 doi: 10.11897/SP.J.1016.2015.01497Xu Ji, Wang Guo-Yin, Yu Hong. Review of big data processing based on granular computing. Chinese Journal of Computers, 2015, 38(8):1497-1517 doi: 10.11897/SP.J.1016.2015.01497 [14] 张文修, 吴伟志, 梁吉业, 李德玉.粗糙集理论与方法.北京:科学出版社, 2001. [15] Pedrycz W, Skowron A, Kreinovich V. Handbook of Granular Computing. New York:John Wiley & Sons, 2008. [16] Zhu W, Wang F Y. A new type of covering rough set. In:Proceedings of the 3rd International IEEE Conference Intelligent Systems. London, UK:IEEE, 2006. 444-449 [17] 王飞跃.词计算和语言动力学系统的计算理论框架.模式识别与人工智能, 2001, 14(4):377-384 doi: 10.3969/j.issn.1003-6059.2001.04.001Wang Fei-Yue. Computing with words and a framework for computational linguistic dynamic systems. Pattern Recognition and Artificial Intelligence, 2001, 14(4):377-384 doi: 10.3969/j.issn.1003-6059.2001.04.001 [18] 王飞跃.词计算和语言动力学系统的基本问题和研究.自动化学报, 2005, 31(6):844-852 http://www.aas.net.cn/CN/abstract/abstract15941.shtmlWang Fei-Yue. Fundamental issues in research of computing with words and linguistic dynamic systems. Acta Automatica Sinica, 2005, 31(6):844-852 http://www.aas.net.cn/CN/abstract/abstract15941.shtml [19] Zhao L. Overview of linguistic dynamic systems based on perception information. In:Proceedings of the 31st Chinese Control Conference. Hefei, China:IEEE, 2012. 7519-7524 [20] 莫红.时变论域下的语言动力学轨迹.自动化学报, 2012, 38(10):1585-1594 http://www.aas.net.cn/CN/abstract/abstract17767.shtmlMo Hong. Linguistic dynamic orbits in the time varying universe of discourse. Acta Automatica Sinica, 2012, 38(10):1585-1594 http://www.aas.net.cn/CN/abstract/abstract17767.shtml [21] Li L, Lin Y L, Zheng N N, Wang F Y. Parallel learning:a perspective and a framework. IEEE/CAA Journal of Automatica Sinica, 2017, 4(3):389-395 doi: 10.1109/JAS.2017.7510493 [22] Wang F Y, Zhang J, Wei Q L, Zheng X H, Li L. PDP:parallel dynamic programming. IEEE/CAA Journal of Automatica Sinica, 2017, 4(1):1-5 doi: 10.1109/JAS.2017.7510310 [23] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃.平行学习-机器学习的一个新型理论框架.自动化学报, 2017, 43(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18984.shtmlLi Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning-a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18984.shtml [24] 王飞跃.平行控制:数据驱动的计算控制方法.自动化学报, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtmlWang Fei-Yue. Parallel control:a method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtml [25] Wang F Y, Wong P K. Intelligent systems and technology for integrative and predictive medicine:an ACP approach. ACM Transactions on Intelligent Systems and Technology, 2013, 4(2):Article No. 32 [26] 王飞跃, 杨柳青, 胡晓娅, 程翔, 韩双双, 杨坚.平行网络与网络软件化:一种新颖的网络架构.中国科学:信息科学, 2017, 47(7):811-831 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=pzkx201707001&dbname=CJFD&dbcode=CJFQWang Fei-Yue, Yang Liu-Qing, Hu Xiao-Ya, Cheng Xiang, Han Shuang-Shuang, Yang Jian. Parallel networks and network softwarization:a novel network architecture. Scientia Sinica Informationis, 2017, 47(7):811-831 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=pzkx201707001&dbname=CJFD&dbcode=CJFQ [27] Wang F Y, Yang L Q, Cheng X, Han S S, Yang J. Network softwarization and parallel networks:beyond software-defined networks. IEEE Network, 2016, 30(4):60-65 doi: 10.1109/MNET.2016.7513865 [28] 王飞跃, 杨坚, 韩双双, 杨柳青, 程翔.基于平行系统理论的平行网络架构.指挥与控制学报, 2016, 2(1):71-77 http://d.wanfangdata.com.cn/Periodical/zhykzxb201601012Wang Fei-Yue, Yang Jian, Han Shuang-Shuang, Yang Liu-Qing, Cheng Xiang. The framework of parallel network based on the parallel system theory. Journal of Command and Control, 2016, 2(1):71-77 http://d.wanfangdata.com.cn/Periodical/zhykzxb201601012 [29] 杨柳青, 王飞跃, 张艳丽, 韩双双, 杨坚, 赵恺, 程翔.基于ACP方法的城市平行停车系统.指挥与控制学报, 2015, 1(4):384-390 http://www.irgrid.ac.cn/handle/1471x/1047106?mode=fullYang Liu-Qing, Wang Fei-Yue, Zhang Yan-Li, Han Shuang-Shuang, Yang Jian, Zhao Kai, Cheng Xiang. The urban parallel parking system based on ACP approach. Journal of Command and Control, 2015, 1(4):384-390 http://www.irgrid.ac.cn/handle/1471x/1047106?mode=full [30] 韩双双, 王迎春, 要婷婷, 曹东璞, 王飞跃. 平行智能车: 基于CPSS的网联自动驾驶汽车. 见: 2017中国自动化大会暨中国国际智能制造大会. 济南, 中国: 中国自动化学会, 2017. [31] Wang F Y. Driving into the future with ITS. IEEE Intelligent Systems, 2006, 21(3):94-95 doi: 10.1109/MIS.2006.45 [32] 袁勇, 王飞跃.区块链技术发展现状与展望.自动化学报, 2016, 42(4):481-494 http://www.aas.net.cn/CN/abstract/abstract18837.shtmlYuan Yong, Wang Fei-Yue. Blockchain:the state of the art and future trends. Acta Automatica Sinica, 2016, 42(4):481-494 http://www.aas.net.cn/CN/abstract/abstract18837.shtml [33] 袁勇, 王飞跃.平行区块链:概念、方法与内涵解析.自动化学报, 2017, 43(10):1703-1712 http://www.aas.net.cn/CN/abstract/abstract19148.shtmlYuan Yong, Wang Fei-Yue. Parallel blockchain:concept, methods and issues. Acta Automatica Sinica, 2017, 43(10):1703-1712 http://www.aas.net.cn/CN/abstract/abstract19148.shtml [34] 王飞跃.智能与时代:历史的使命与未来.战略发展报告, 2009. [35] 王飞跃. 未来世界与复杂系统. 中国国际战略研究基金会"面向未来"复杂性科学专题讲座, 2009年11月20日 [36] 王飞跃. 面向未来-未来世界的复杂性. 科学发展与战略研究/中国国际战略研究基金会编著: 知识产权出版社, 北京, 2012年8月第1版, 137-162 [37] 王飞跃. 面向CPSS的指挥与控制: 关于平行军事体系的理论、方法及应用. 第一届中国指挥控制大会, 北京, 2013年8月5日 [38] 王飞跃. 基于软件定义的企业智能管理与控制: 基于ACP的平行系统方法, "探索·制造业的未来"西门子工业论坛, 北京, 2014年7月10日 [39] Wang F Y. Grids 5.0 and social energy:from internet of things to the society of minds. In:Proceedings of the 48th North American Power Symposium (NAPS). Denver, USA:September 19, 2016. [40] Wang F Y, ACP-based parallel systems:knowledge automation and smart adaptability for complex adaptive systems. In:Proceedings of the 2016 Complex Adaptive Systems Conference. Los Angeles, CA, USA:November 3, 2016. -

 下载:
下载:

图(4)
计量
- 文章访问数: 5150
- HTML全文浏览量: 640
- PDF下载量: 1846
- 被引次数: 0
