

Parallel Robotics and Parallel Unmanned Systems: Framework, Structure, Process, Platform and Applications
-
摘要: 本文将基于ACP(Artificial societies,computational experiments,parallel execution)的平行系统思想与机器人领域相结合,形成一种软硬件相结合的框架,为无人机、无人车、无人船在复杂环境中实验、学习与实际工作提供便捷、安全的平台,即平行无人系统.本文从平行机器人的基本概念出发,提出平行无人系统的基本框架,并介绍了各模块的基本功能与实现方法,探讨了其中的关键技术.然后本文围绕无人机、无人车、无人船三个方面展望了无人平行系统在实际中的应用和所面临的挑战,提出了平行无人系统的未来发展方向.Abstract: In this paper, we propose a framework to incorporate robotics and software-defined surrogates using the ACP-based parallel systems theory. The framework offers a flexible, cost-effective and safe platform to develop and conduct experiments on UAVs, UGVs, USVs and AUVs, and links unmanned vehicles with cyber-physical-social systems (CPSS). This paper focuses on the structure of the proposed framework and each of the functional modules. Relevant tools, as well as further applications and challenges of the proposed system are also discussed.1) 本文责任编委 刘德荣
-
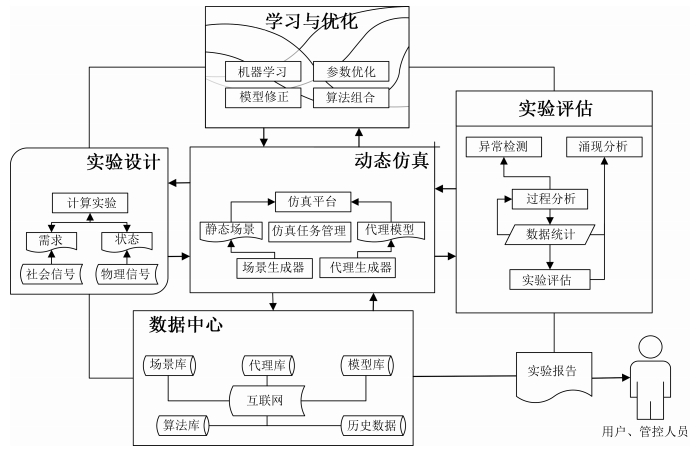
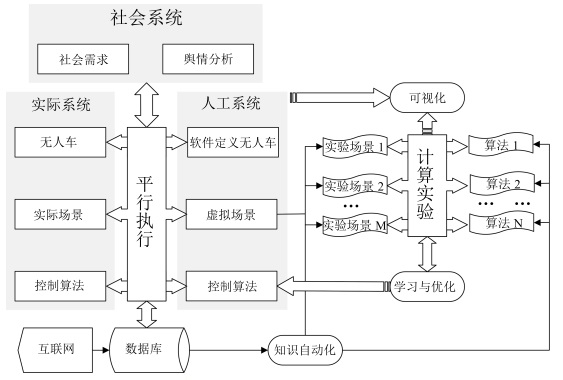
图 5 平行无人系统计算实验框架
Fig. 5 Framework of computational experiments in parallel unmanned systems
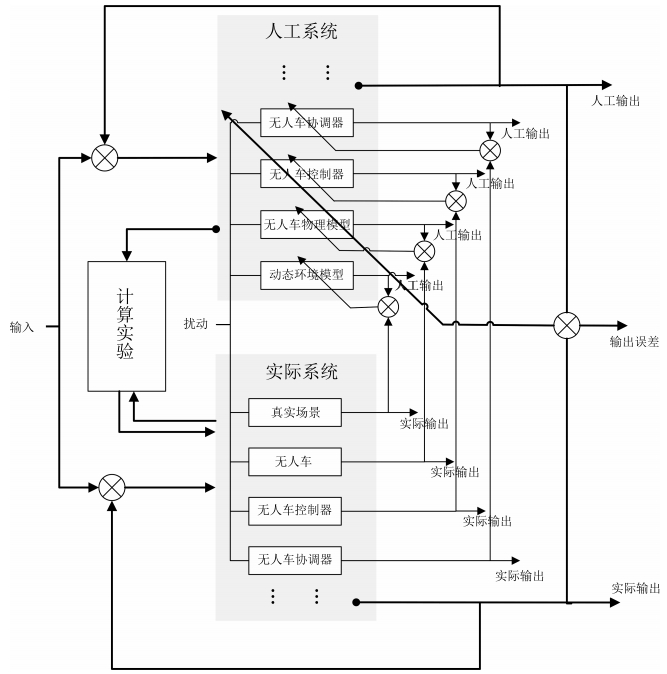
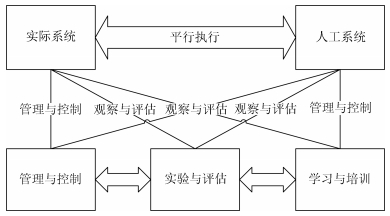
图 6 平行无人系统混合平行执行框架与原理
Fig. 6 Framework of the hybrid parallel execution process in parallel unmanned systems
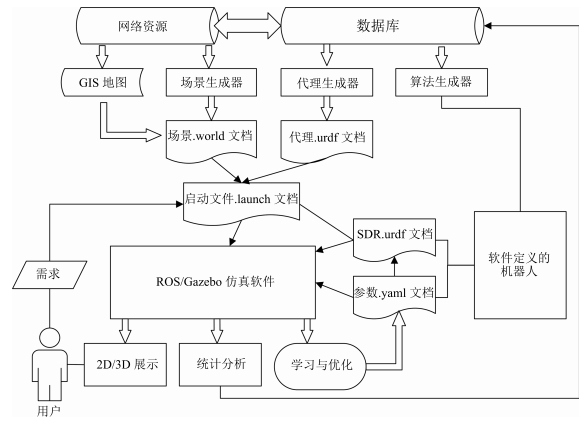
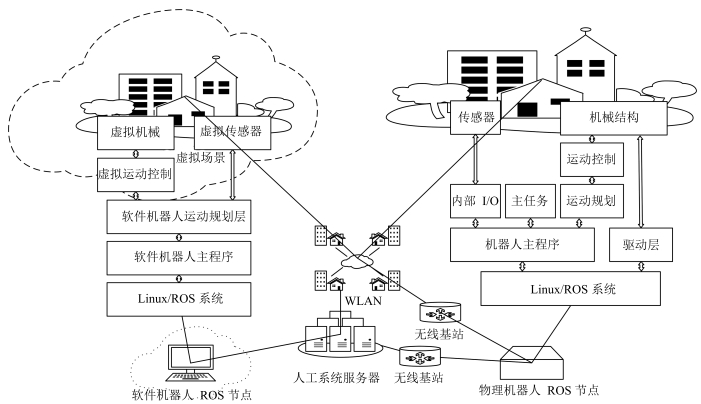
图 8 基于ROS/Gazebo的人工系统计算实验平台框架
Fig. 8 Illustration of a computational experiment platform in the artificial system based on ROS/Gazebo

-
[1] Amin R, Aijun L, Shamshirband S. A review of quadrotor UAV:control methodologies and performance evaluation. International Journal of Automation and Control, 2016, 10(2):87-103 doi: 10.1504/IJAAC.2016.076453 [2] Gupte S, Mohandas P I T, Conrad J M. A survey of quadrotor unmanned aerial vehicles. In:Proceedings of the 2012 IEEE Southeastcon. Orlando, FL, USA:IEEE, 2012. 1-6 [3] 王飞跃.关于复杂系统的建模、分析、控制和管理.复杂系统与复杂性科学, 2006, 3(2):26-34 http://www.cnki.com.cn/Article/CJFDTOTAL-FZXT200602003.htmWang Fei-Yue. On the modeling, analysis, control and management of complex systems. Complex Systems and Complexity Science, 2006, 3(2):26-34 http://www.cnki.com.cn/Article/CJFDTOTAL-FZXT200602003.htm [4] 王飞跃, 刘德荣, 熊刚, 程长建, 赵冬斌.复杂系统的平行控制理论及应用.复杂系统与复杂性科学, 2012, 9(3):1-12 http://www.cnki.com.cn/Article/CJFDTOTAL-FZXT201203002.htmWang Fei-Yue, Liu De-Rong, Xiong Gang, Cheng Chang-Jian, Zhao Dong-Bin. Parallel control theory of complex systems and applications. Complex Systems and Complexity Science, 2012, 9(3):1-12 http://www.cnki.com.cn/Article/CJFDTOTAL-FZXT201203002.htm [5] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtmlWang Fei-Yue. Software-defined systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtml [6] 王飞跃.关于复杂系统研究的计算理论与方法.中国基础科学, 2004, 6(5):3-10 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGJB200405000.htmWang Fei-Yue. Computational theory and method on complex system. China Basic Science, 2004, 6(5):3-10 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGJB200405000.htm [7] 王飞跃.平行系统方法与复杂系统的管理和控制.控制与决策, 2004, 19(5):485-489, 514 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200405001.htmWang Fei-Yue. Parallel system methods for management and control of complex systems. Control and decision, 2004, 19(5):485-489, 51 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200405001.htm [8] 王飞跃.平行控制:数据驱动的计算控制方法.自动化学报, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtmlWang Fei-Yue. Parallel control:a method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtml [9] 王飞跃.人工社会、计算实验、平行系统-关于复杂社会经济系统计算研究的讨论.复杂系统与复杂性科学, 2004, 1(4):25-35 http://www.cnki.com.cn/Article/CJFDTOTAL-FZXT200404001.htmWang Fei-Yue. Artificial societies, computational experiments, and parallel systems:a discussion on computational theory of complex social-economic systems. Complex Systems and Complexity Science, 2004, 1(4):25-35 http://www.cnki.com.cn/Article/CJFDTOTAL-FZXT200404001.htm [10] 王飞跃.机器人的未来发展:从工业自动化到知识自动化.科技导报, 2015, 33(21):39-44 http://www.cnki.com.cn/Article/CJFDTOTAL-KJDB201521012.htm [11] 杨书评, 刘颖.机器人标准化领域研究进展和趋势.科技导报, 2015, 33(23):116-119 http://www.cnki.com.cn/Article/CJFDTOTAL-KJDB201523039.htm [12] Goldberg K. Beyond the web:excavating the real world via mosaic. In:Proceedings of the 2nd International World Wide Web Conference. Chicago, USA, 1994. 1-12 http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.299.6262 [13] Zweigle O, van de Molengraft R, D'Andrea R, Häussermann K. RoboEarth-conneting robots world-wide. In:Proceedings of the 2nd International Conference on Interaction Sciences Information Technology, Culture and Human. Seoul, Korea:ICIS, 2009. 184-191 [14] Hunziker D, Gajamohan M, Waibel M, D'Andrea R. Rapyuta:the RoboEarth cloud engine. In:Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA). Karlsruhe, Germany:IEEE, 2013. 438-444 http://ieeexplore.ieee.org/abstract/document/6630612/ [15] Saxena A, Jain A, Sener O, Jami A, Misra D K, Koppula H S. RoboBrain:large-scale knowledge engine for robots. ArXiv:1412.0691, 2014. 1-11 https://arxiv.org/abs/1412.0691 [16] Hu G Q, Tay W P, Wen Y G. Cloud robotics:architecture, challenges and applications. IEEE Network, 2012, 26(3):21-28 doi: 10.1109/MNET.2012.6201212 [17] 王飞跃.知识机器人与工业5.0:迎接智能机的时代.北京, 中国:2015年国家机器人发展论坛, 2015 [18] 王飞跃.无人车的未来:平行车和平行驾驶.首届中国智能车大会暨国家智能车发展论坛, 苏州, 2015Wang Fei-Yue. Parallel driving for intelligent vehicles:past, present, and future. 2015 China Conference on Intelligent Vehicles, 2015 National Intelligent Vehicle Development Forum, Soochow, 2015 [19] He F, Miao Q H, Li Y T, Wang F Y, Tang S M. Modeling and analysis of artificial transportation system based on multi-agent technology. In:Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference. Toronto, Canada:IEEE, 2006. 1120-1124 http://ieeexplore.ieee.org/abstract/document/1707372/ [20] Duan W, Cao Z D, Wang Y Z, Zhu B, Zeng D, Wang F Y, Qiu X G, Song H B, Wang Y. An ACP approach to public health emergency management:using a campus outbreak of H1N1 influenza as a case study. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2013, 43(5):1028-1041 doi: 10.1109/TSMC.2013.2256855 [21] 伦淑娴. ACP理论的平行执行方式分类研究.自动化学报, 2012, 38(10):1602-1608 doi: 10.3724/SP.J.1004.2012.01602Lun Shu-Xian. Research on the classification of parallel execution modes of ACP theory. Acta Automatica Sinica, 2012, 38(10):1602-1608 doi: 10.3724/SP.J.1004.2012.01602 [22] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃.平行学习-机器学习的一个新型理论框架.自动化学报, 2017, 43(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18984.shtmlLi Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning-a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18984.shtml [23] Wang F Y, Zhang J, Wei Q L, Zheng X H, Li L. PDP:parallel dynamic programming. IEEE/CAA Journal of Automatica Sinica, 2017, 4(1):1-5 doi: 10.1109/JAS.2017.7510310 [24] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtmlWang Fei-Yue. Software-defined systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtml [25] O'Kane J M. A Gentle Introduction to ROS. Create Space Independent Publishing Platform, 2013 [26] Smashing Robotics. Most advanced robotics simulation software overview[Online], available:http://www.smashingrobotics.com/most-advanced-and-used-robotics-simulation-software/, March 6, 2016 [27] Cook D, Vardy A, Lewis R. A survey of AUV and robot simulators for multi-vehicle operations. In:Proceedings of the 2014 IEEE/OES Autonomous Underwater Vehicles (AUV). Oxford, MS, USA:IEEE, 2014. 1-8 http://ieeexplore.ieee.org/abstract/document/7054411/ [28] Koenig N, Howard A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In:Proceedings of the 2004 IEEE/RSJ International Conference Intelligent Robots and Systems. Sendai, Japan:IEEE, 2004, 3:2149-2154 http://ieeexplore.ieee.org/abstract/document/1389727/ [29] Rohmer E, Singh S P N, Freese M. V-REP:a versatile and scalable robot simulation framework. In:Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Tokyo, Japan:IEEE, 2013. 1321-1326 http://ieeexplore.ieee.org/abstract/document/6696520/ [30] Jia X, Meng M Q H. A survey and analysis of task allocation algorithms in multi-robot systems. In:Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO). Shenzhen, China:IEEE, 2013. 2280-2285 [31] Gautam A, Mohan S. A review of research in multi-robot systems. In:Proceedings of the 7th IEEE International Conference on Industrial and Information Systems (ICIIS). Chennai, India:IEEE, 2012. 1-5 http://ieeexplore.ieee.org/abstract/document/6304778/ [32] Meyer J, Sendobry A, Kohlbrecher S, Klingauf U, von Stryk O. Comprehensive simulation of quadrotor UAVs using ROS and gazebo. In:Proceedings of the 3rd International Conference on Simulation, Modeling, and Programming for Autonomous Robots. Berlin Heidelberg, Germany:Springer, 2012. 400-411 doi: 10.1007/978-3-642-34327-8_36 [33] Roy A. Ardupilot SITL gazebo plugin[Online], available:https://github.com/AurelienRoy/ardupilot_sitl_gazebo_plugin, February 10, 2017 [34] Quadcopter dynamic modeling and simulation (quad-sim) v1.00[Online], available:https://github.com/dch33/Quad-Sim, February 10, 2017 [35] Rahul G, Shahb S M, Guptac N K, Ananthkrishnan N. Modeling, simulation and flight testing of an autonomous quadrotor. In:Procedings of the 2009 ICEAE. 2009. 1-7 [36] Figueiredo H, Bittar A, Saotome O. Platform for quadrirotors:analysis and applications. In:Procedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS). Orlando, FL, USA:IEEE, 2014. 848-856 http://ieeexplore.ieee.org/abstract/document/6842332/ [37] Waslander S, Wang C. Wind disturbance estimation and rejection for quadrotor position control. In:Proceedings of the 2009 AIAA Infotech@Aerospace Conference and AIAA Unmanned... Unlimited Conference. Seattle, Washington, USA:AIAA, 2009. 1-14 doi: 10.2514/6.2009-1983 [38] Neumann P P, Bartholmai M. Real-time wind estimation on a micro unmanned aerial vehicle using its inertial measurement unit. Sensors and Actuators A:Physical, 2015, 235:300-310 doi: 10.1016/j.sna.2015.09.036 [39] Arain B, Kendoul F. Real-time wind speed estimation and compensation for improved flight. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2):1599-1606 doi: 10.1109/TAES.2014.120236 [40] Brezoescu A, Castillo P, Lozano R. Wind estimation for accurate airplane path following applications. Journal of Intelligent & Robotic Systems, 2014, 73(1-4):823-831 http://ieeexplore.ieee.org/abstract/document/6564771/ [41] Meier L, Camacho J, Godbolt B. Mavlink:micro air vehicle communication protocol[Online], available:http://qgroundcontrol.org/mavlink/start, February 10, 2017 [42] 黄武陵.平行驾驶系统支持的自主驾驶安全性研究[博士学位论文], 中国科学院大学, 中国科学院自动化研究所, 中国, 2014Huang Wu Ling. Parallel Driving System Supported Autonomous Driving Safety Enhancement Research[Ph.D. dissertation], University of Chinese Academy Sciences, Institute of Automation, Chinese Academy of Sciences, China, 2014 [43] Xiong G, Wang K F, Zhu F H, Cheng C, An X J, Xie Z D. Parallel traffic management for the 2010 Asian Games. IEEE Intelligent Systems, 2010, 25(3):81-85 doi: 10.1109/MIS.2010.87 [44] Wang F Y. Parallel control and management for intelligent transportation systems:concepts, architectures, and applications. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3):630-638 doi: 10.1109/TITS.2010.2060218 [45] Nashashibi F. Automated driving in urban environments:technical challenges, open problems and barriers. In:Proceedings of the 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles. 2014 [46] Browne A F, Vutetakis D. Localization of autonomous mobile ground vehicles in a sterile environment:a survey. In:Proceedings of the 2015 ASEE Southeast Section Conference. USA:American Society for Engineering Education, 2015. 1-7 [47] Lefèvre S, Vasquez D, Laugier C. A survey on motion prediction and risk assessment for intelligent vehicles. ROBOMECH Journal, 2014, 1:1 doi: 10.1186/s40648-014-0001-z [48] Mukhtar A, Xia L K, Tang T B. Vehicle detection techniques for collision avoidance systems:a review. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5):2318-2338 doi: 10.1109/TITS.2015.2409109 [49] Darema F. Dynamic data driven applications systems:a new paradigm for application simulations and measurements. In:Proceedings of the 4th International Conference on Computational Science. Berlin Heidelberg, Germany:IEEE, 2004. 662-669 doi: 10.1007/978-3-540-24688-6_86 [50] 周云, 黄柯棣, 胡德文.动态数据驱动应用系统的概念研究.系统仿真学报, 2009, 21(8):2138-2141 http://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200908006.htmZhou Yun, Huang Ke-Li, Hu De-Wen. Conceptual study on dynamic data driven application system. Journal of System Simulation, 2009, 21(8):2138-2141 http://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200908006.htm -

 下载:
下载:


图(11)
计量
- 文章访问数: 4728
- HTML全文浏览量: 1928
- PDF下载量: 2606
- 被引次数: 0
