

-
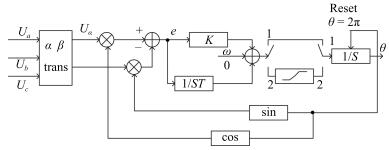
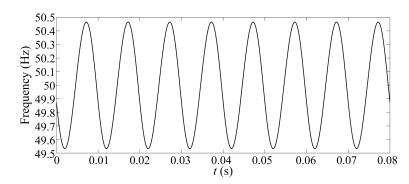
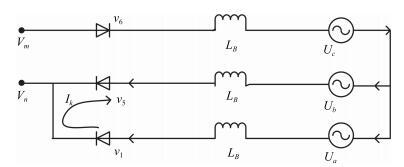
Abstract: Possibility of serious harmonic distortion (SHD) increases as multi-infeed direct current (MIDC) transmission develops rapidly in recent years. In this paper, the mechanism of high voltage direct current (HVDC) controller working against SHD is proposed for theoretical derivation of phase locked loop (PLL) output and valve commutation process. To reduce static error of constant extinction angle (CEA) controller and enhance active power transmission, the insertion of current error (CE) controller into CEA is minified. A calculation of inverter operating point is proposed in the end. The correctness of mechanism and algorithm is verified through power systems computer aided design (PSCAD) simulation.
-
Key words:
- High voltage direct current (HVDC) /
- converter /
- harmonics /
- serious harmonic distortion (SHD) /
- phase locked loop (PLL) /
- constant extinction angle (CEA)
-
-
Table Ⅰ Simulation and Calculation Result of $\gamma$ Per Cycle ( $^\circ$ )
Com-valve Sim-result without harm Cal-result without harm Sim-result with harm Cal-result with harm 3−1 15.12 15.07 19.58 18.36 4−2 15.12 15.07 16.45 16.36 5−3 15.12 15.07 9.98 10.69 6−4 15.12 15.07 19.58 18.36 1−5 15.12 15.07 16.45 16.36 2−6 15.12 15.07 9.98 10.69  下载: 导出CSV
下载: 导出CSV
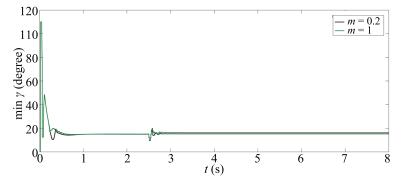
Table Ⅱ Simulation and Calculation Result of Operating Point in SHD
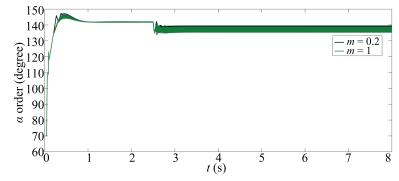
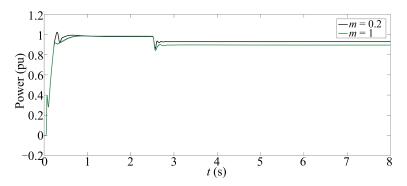
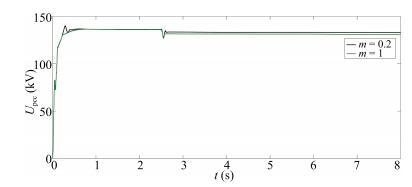
M = 1 M = 0.2 Cal-results of m = 0.2 Voltage (l-g) 125.1 127.4 127.2 Active power (pu) 0.8959 0.9290 0.9298 min γ (°) 16.38 15.25 15.09 Firing order (°) 135.5−139 139−139.4 139.6
下载: 导出CSV
-
[1] J. L. Liu, G. Wang, H. F. Li, Q. Zhou, and W. Zheng, "HVDC system equivalent model and harmonic calculation with dc control system characteristics taken into account, " Automat. Electr. Power Syst. , vol. 38, no. 19, pp. 67-73, Oct. 2014. [2] H. P. Zhu, L. F. Luo, and J. Z. Xu, "Harmonic instability improving mechanism in a new dc transmission system, " J. Hunan Univ. Nat. Sci. , vol. 39, no. 9, pp. 45-50, Sep. 2012. [3] Y. L. Ma, X. N. Xiao, and X. Jiang, "Analysis of the impact of ac system single-phase earth fault on HVDC, " Proc. CSEE, vol. 26, no. 11, pp. 144-149, Jun. 2006. http://en.cnki.com.cn/Article_en/CJFDTotal-ZGDC200611026.htm [4] Z. Xu, "The harmonic characteristics of HVDC system under AC voltage distortion, " Electr. Power, no. 2, pp. 8-11, Apr. 1995. [5] Y. L. Ma, X. N. Xiao, X. Jiang, and Y. Zhao, "Study on impedance-frequency characteristic of HVDC converter, " Automat. Electr. Power Syst. , vol. 30, no. 12, pp. 66-69, 91, Jun. 2006. [6] Y. L. Ma, "Stability analysis of HVDC system, " Ph. D. dissertation, North China Electr. Power Univ. (Beijing), Beijing, China, 2006. [7] Y. Yu, K. P. Liu, J. Chen, and Y. Zhao, "Modulation theory based criterion on composite resonant harmonic instability in HVDC transmission system, " High Voltage Eng. , vol. 40, no. 5, pp. 1582-1588, May2014. http://en.cnki.com.cn/Article_en/CJFDTOTAL-GDYJ201405042.htm [8] M. O. Faruque, Y. Y. Zhang, and V. Dinavahi, "Detailed modeling of CIGRE HVDC benchmark system using PSCAD/EMTDC and PSB/SIMULINK, " IEEE Trans. Power Deliv. , vol. 21, no. 1, pp. 378-387, Jan. 2006. http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=1564222 [9] X. J. Dai, Basis of High Voltage Direct Current System. Beijing, China:Water Resources and Electric Power Press, 1990. [10] Y. P. Yu, Y. Min, L. Chen, and Y. W. Zhang, "Analysis of forced power oscillation caused by continuous cyclical load disturbances, " Automat. Electr. Power Syst. , vol. 34, no. 6, pp. 7-11, 47, Mar. 2010. Analysis of forced power oscillation caused by continuous cyclical load disturbances [11] L. F. Luo, Y. Y. Lei, Y. Li, J. H. Zhang, and S. J. Deng, "Effects of constant arc extinguishing angle controller on HVDC transmission system, " Proc. CSU-EPSA, vol. 21, no. 5, pp. 97-103, Oct. 2009. http://en.cnki.com.cn/Article_en/CJFDTOTAL-DLZD200905017.htm [12] Y. Fu, L. F. Luo, Z. Tong, Y. Li, J. P. Zhou, J. Z. Xu, and F. S. Liu, "Study on voltage dependent current order limiter of HVDC transmission system's controller, " High Voltage Eng. , vol. 34, no. 6, pp. 1110-1114, Jun. 2008. [13] C. C. Zhou and Z. Xu, "Simulation validity test of the HVDC quasi-steady-state model, " Proc. CSEE, vol. 23, no. 12, pp. 33-36, Dec. 2003. 期刊类型引用(4)
1. 王邕. 高压换流站交流侧滤波装置设计研究. 能源与环保. 2021(07): 189-195+224 .  百度学术
百度学术2. 陈佳浩,王琦,朱鑫要,刘瑾,季顺祥. 谐波电压造成直流输电换相失败风险评估. 高压电器. 2020(05): 196-202 . 百度学术3. 程灵,韩钰,马光,孟利,杨富尧,陈新,董瀚. 特高压直流换流阀饱和电抗器用超薄取向硅钢涂层制备与性能评估. 材料导报. 2020(18): 18139-18144 . 百度学术4. 王俊霞,陈志刚,马仪成. 交流滤波器保护装置测试系统的设计. 电气技术. 2019(S1): 57-60+68 . 百度学术其他类型引用(3)
-







图(13) / 表(2)
计量
- 文章访问数: 1607
- HTML全文浏览量: 200
- PDF下载量: 396
- 被引次数: 7
