

Trajectory Tracking Controller Design of Vertical or Short Takeoff and Landing Aircraft
-
摘要: 针对垂直/短距起降飞行器在悬停状态下滚转力矩与横侧向推力存在强耦合、系统具有非最小相位特性的问题,本文设计了轨迹跟踪控制器.首先利用坐标变换和输入输出线性化将系统分解成最小相位子系统和非最小相位子系统.对非最小相位子系统,采用稳态系统中心的方法求解理想内部动态,并跟踪系统理想内模设计了LQR控制器,使得内部动态有界;对最小相位子系统设计了高增益控制器使得外部动态渐进稳定.仿真结果表明本文设计的控制器对给定轨迹和飞行器机动轨迹都有较好的跟踪效果,验证了控制器的有效性.
-
关键词:
- 非最小相位系统 /
- 理想内模 /
- 轨迹跟踪 /
- 垂直/短距起降飞行器
Abstract: In this paper, a trajectory tracking controller is developed for the problem of non-minimum phase characteristic and strong coupling between the rolling torque and the lateral thrust for vertical take-off and landing vehicle in the hovering state. Firstly, the system is decomposed into the minimum phase subsystem and the non-minimum phase subsystem by the coordinate transformation and input-output linearization. Next, for the non-minimum phase subsystem, an LQR controller is proposed to track the ideal internal dynamic that is solved by the method of stable system center, so that the internal dynamic is bounded. Then, for the minimum phase subsystem, a high gain controller is designed to make the external dynamic asymptotic stability. Finally, the simulation results show that the controller designed in this paper has a good tracking effect on the given trajectory and the maneuvering trajectory of the aircraft, which verifies the effectiveness of the controller.1) 本文责任编委 倪茂林 -
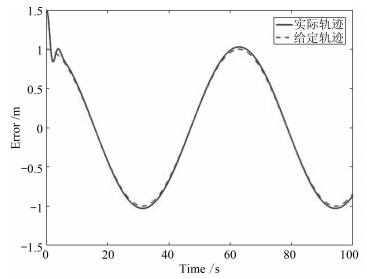
图 7 ${\eta _d } = 0$时$Y$方向输出跟踪轨迹
Fig. 7 $Y$ direction output tracking trajectory for ${\eta _d} = 0$
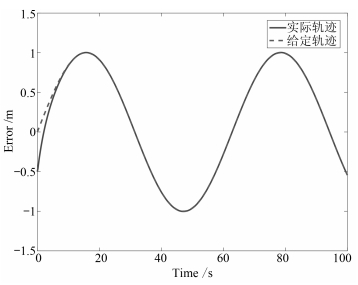
图 8 ${\eta _d } = 0$时$Z$方向输出跟踪轨迹
Fig. 8 $Z$ direction output tracking trajectory for ${\eta _d} = 0$
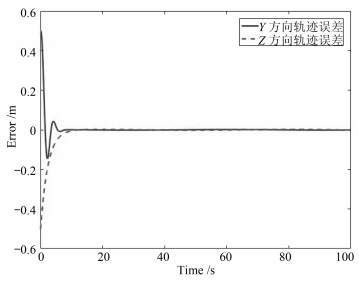
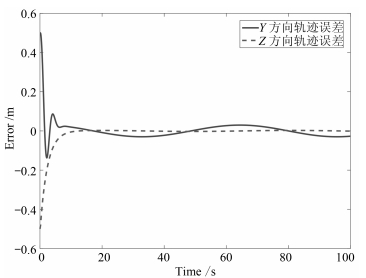
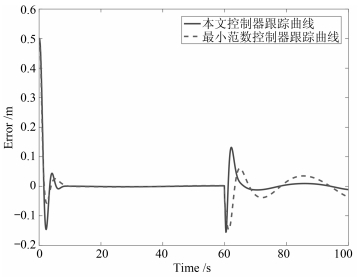
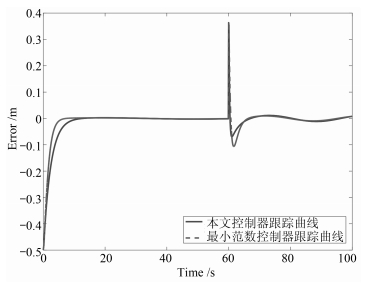
图 10 跟踪所求${\eta _d}$的轨迹跟踪误差
Fig. 10 Tracking trajectory error for tracking required ${\eta _d}$

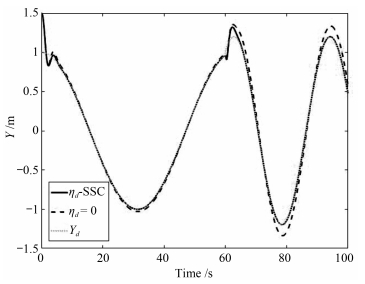
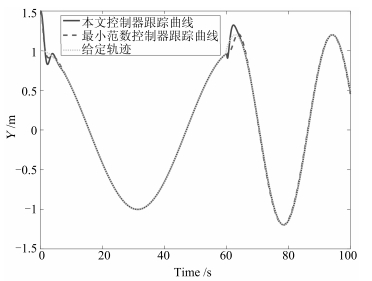
图 11 跟踪所求${\eta _d}$的$Y$方向输出跟踪轨迹
Fig. 11 $Y$ direction output trajectory for tracking required ${\eta _d}$

图 12 跟踪所求${\eta _d}$的$Z$方向输出跟踪轨迹
Fig. 12 $Z$ direction output trajectory for tracking required ${\eta _d}$
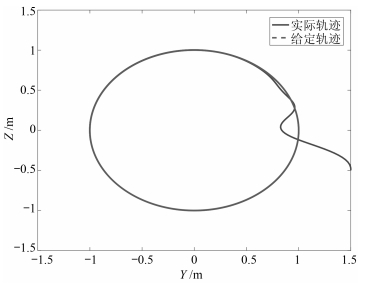
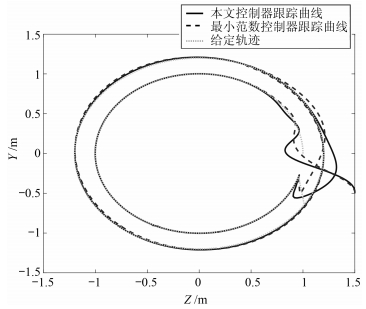
图 13 跟踪所求${\eta _d }$时的实际跟踪轨迹
Fig. 13 Actual trajectory for tracking required ${\eta _d}$
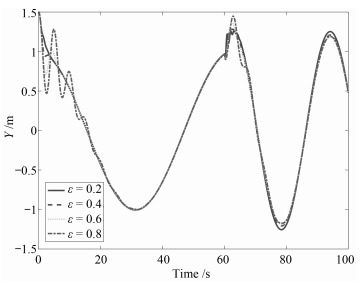
图 24 $\varepsilon$不同取值下$Y$方向跟踪轨迹
Fig. 24 $Y$ direction trajectory tracking under different $\varepsilon$
-
[1] Nazrulla S, Khalil H K. Robust stabilization of non-minimum phase nonlinear systems using extended high-gain observers. IEEE Transactions on Automatic Control, 2011, 56(4):802-813 doi: 10.1109/TAC.2010.2069612 [2] Boker A M M A, Khalil H K. Semi-global output feedback stabilization of a class of non-minimum phase nonlinear systems. In:Proceedings of the 2013 American Control Conference (ACC). Washington, DC, USA:IEEE, 2013. 5270-5275 [3] Dačić D B, Nešić D, Kokotovic P V. Path-following for nonlinear systems with unstable zero dynamics. IEEE Transactions on Automatic Control, 2007, 52(3):481-487 doi: 10.1109/TAC.2006.890484 [4] Dačić D B, Nešić D, Teel A R, Wang W. Path following for nonlinear systems with unstable zero dynamics:an averaging solution. IEEE Transactions on Automatic Control, 2011, 56(4):880-886 doi: 10.1109/TAC.2011.2105130 [5] Gandolfo D, Rosales C, Patiño D, Scaglia G, Jordan M. Trajectory tracking control of a PVTOL aircraft based on linear algebra theory. Asian Journal of Control, 2014, 16(6):1849-1858 doi: 10.1002/asjc.v16.6 [6] Huang C S, Yuan K. Output tracking of a non-linear non-minimum phase PVTOL aircraft based on non-linear state feedback control. International Journal of Control, 2002, 75(6):466-473 doi: 10.1080/00207170210121907 [7] Gopalswamy S, Hedrick J K. Tracking nonlinear non-minimum phase systems using sliding control. International Journal of Control, 1993, 57(5):1141-1158 doi: 10.1080/00207179308934436 [8] Al-Hiddabi S A, McClamroch N H. Tracking and maneuver regulation control for nonlinear nonminimum phase systems:application to flight control. IEEE Transactions on Control Systems Technology, 2002, 10(6):780-792 doi: 10.1109/TCST.2002.804120 [9] Shkolnikov I A, Shtessel Y B. Tracking in a class of nonminimum-phase systems with nonlinear internal dynamics via sliding mode control using method of system center. Automatica, 2002, 38(5):837-842 doi: 10.1016/S0005-1098(01)00275-8 [10] Su S W, Lin Y. Robust output tracking control of a class of non-minimum phase systems and application to VTOL aircraft. International Journal of Control, 2011, 84(11):1858-1872 doi: 10.1080/00207179.2011.627596 [11] Su S W, Lin Y. Robust output tracking control for a velocity-sensorless vertical take-off and landing aircraft with input disturbances and unmatched uncertainties. International Journal of Robust and Nonlinear Control, 2013, 23(11):1198-1213 doi: 10.1002/rnc.v23.11 [12] 苏善伟, 朱波, 向锦武, 林岩.非线性非最小相位系统的控制研究综述.自动化学报, 2015, 41(1):9-21 http://www.aas.net.cn/CN/abstract/abstract18579.shtmlSu Shan-Wei, Zhu Bo, Xiang Jin-Wu, Lin Yan. A survey on the control of nonlinear non-minimum phase systems. Acta Automatica Sinica, 2015, 41(1):9-21 http://www.aas.net.cn/CN/abstract/abstract18579.shtml [13] 崔建伟, 李东海, 老大中.垂直起降飞行器悬停状态的自抗扰控制.见: 第三十二届中国控制会议论文集.西安, 中国: 中国自动化学会控制理论专业委员会, 2013. 5449-5454Cui Jian-Wei, Li Dong-Hai, Lao Da-Zhong. Active disturbance rejection control of a hovering PVTOL aircraft. In: Proceedings of the 32nd Chinese Control Conference. Xi'an, China: Technical Committee on Control Theory, Chinese Association of Automation, 2013. 5449-5454 -

 下载:
下载:





计量
- 文章访问数: 2606
- HTML全文浏览量: 254
- PDF下载量: 406
- 被引次数: 0
