

-
摘要: 针对常用混合动力汽车(Hybrid electric vehicle,HEV)中锂离子电池在功率波动较大时难以满足需求,以及单个驱动周期内HEV燃油能耗大且能量不能很好回收等问题,研究采用锂离子电池和超级电容器混合储能系统(Lithium-ion battery and super-capacitor hybrid energy storage system,Li-SC HESS)与内燃机共同驱动HEV运行.结合比例积分粒子群优化算法(Particle swarm optimization-proportion integration,PSO-PI)控制器和Li-SC HESS内部功率限制管理办法,提出一种改进的基于庞特里亚金极小值原理(Pontryagin's minimum principle,PMP)算法的HEV能量优化控制策略,通过ADVISOR软件建立HEV整车仿真模型,验证该方法的有效性与可行性.仿真结果表明,该能量优化控制策略提高了HEV跟踪整车燃油能耗最小轨迹的实时性,节能减排比改进前提高了1.6%~2%,功率波动时减少了锂离子电池的出力,进而改善了混合储能系统性能,对电动汽车关键技术的后续研究意义重大.
-
关键词:
- 混合动力汽车 /
- 混合储能系统 /
- PSO-PI控制 /
- 庞特里亚金极小值原理
Abstract: Common hybrid electric vehicles (HEVs) usually suffer lithium-ion battery power fluctuations and it is difficult for them to meet the demand. This also constraints the performance of the energy storage system in which there is a the large amount of fuel consumption with less energy recovery of HEV in a single drive cycle. This paper selects a lithium-ion battery and super-capacitor hybrid energy storage system (Li-SC HESS) to drive the hybrid electric vehicle running together with an internal combustion engine. Besides, combined with particle swarm optimization-proportion integration (PSO-PI) controller and Li-SC HESS internal power limit management approach, this paper presents an improved HEV energy optimization control strategy based on the Pontryagin's minimum principle (PMP) algorithm. A simulation model of HEV is established by ADVISOR software to verify the effectiveness and feasibility of the strategy. Results show that the energy optimization control strategy can improve the real-time ability of tracking the smallest track of HEV fuel consumption function for the purpose of energy conservation. The energy-saving emission reduction ratio is improved by 1.6% to 2.0%. Moreover, when power fluctuates the output of lithium-ion battery is reduced, thus improving the performance of the Li-SC HESS. The research is significant to the follow-up study on the key technologies in electric vehicles.1) 本文责任编委 张卫东 -
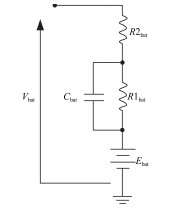
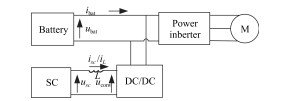
图 4 锂离子电池等效的一阶RC并联电路模型
Fig. 4 Lithium-ion battery equivalent model based on flrst-order RC parallel
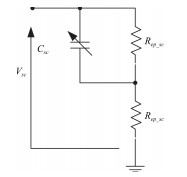
图 5 等效一阶RC并联电路结构的SC模型
Fig. 5 SC equivalent model based on flrst-order RC parallel circuit
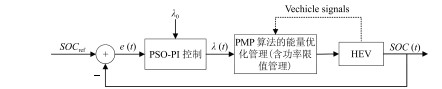
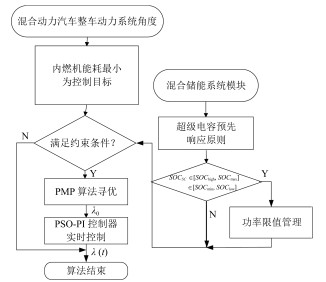
图 7 PSO-PI实时优化的"$\lambda $-控制"框图
Fig. 7 PSO-PI real-time optimization "$\lambda $-control" block diagram
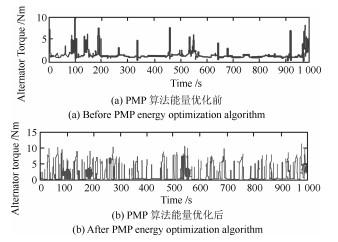
图 11 PMP算法能量优化前后对比图
Fig. 11 After before the comparison chart of PMP energy optimization algorithm
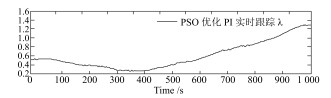
图 12 PSO-PI控制器实时优化Hamiltonian函数出力系数$ \lambda (t) $曲线图
Fig. 12 Graph of output coe–cient real-time optimization of Hamiltonian function by PSO-PI controller
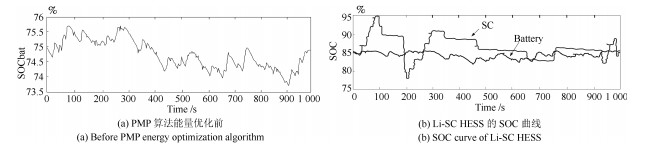
图 13 单一锂离子电池和Li-SC HESS SOC仿真情况对比
Fig. 13 Comparison of single lithium-ion battery and Li-SC HESS SOC simulation
-
[1] 赵秀春, 郭戈.混合动力电动汽车能量管理策略研究综述.自动化学报, 2006, 42(3):321-334 http://www.aas.net.cn/CN/abstract/abstract18823.shtmlZhao Xiu-Chun, Guo Ge. Survey on energy management strategies for hybrid electric vehicles. Acta Automatica Sinica, 2016, 42(3):321-334 http://www.aas.net.cn/CN/abstract/abstract18823.shtml [2] Kim T, Qiao W, Qu L Y. Real-time state of charge and electrical impedance estimation for lithium-ion batteries based on a hybrid battery model. In:Proceedings of the 2013 Annual IEEE Applied Power Electronics Conference and Exposition. Long Beach, USA:IEEE, 2013. 563-568 [3] 杨培刚, 周育才, 刘志强, 贾光瑞, 熊少华.基于ADVISOR的纯电动汽车复合电源建模与仿真.电力科学与技术学报, 2015, 30(3):66-71 doi: 10.3969/j.issn.1673-9140.2015.03.010Yang Pei-Gang, Zhou Yu-Cai, Liu Zhi-Qiang, Jia Guang-Rui, Xiong Shao-Hua. Modeling and simulation of pure electric vehicle with composite power source based on ADVISOR. Journal of Electric Power Science and Technology, 2015, 30(3):66-71 doi: 10.3969/j.issn.1673-9140.2015.03.010 [4] Chang W Y. Estimation of the state of charge for a LFP battery using a hybrid method that combines a RBF neural network, an OLS algorithm and AGA. International Journal of Electrical Power and Energy Systems, 2013, 53:603-611 doi: 10.1016/j.ijepes.2013.05.038 [5] Gan M, Peng H, Dong X P. A hybrid algorithm to optimize RBF network architecture and parameters for nonlinear time series prediction. Applied Mathematical Modelling, 2012, 36(7):2911-2919 doi: 10.1016/j.apm.2011.09.066 [6] Sharafi M, ELMekkawy T Y. Multi-objective optimal design of hybrid renewable energy systems using PSO-simulation based approach. Renewable Energy, 2014, 68:67-79 doi: 10.1016/j.renene.2014.01.011 [7] 许世景, 吴志新.基于PMP的HEV全局最优能量管理策略研究.中国机械工程, 2014, 25(1):138-141 doi: 10.3969/j.issn.1004-132X.2014.01.026Xu Shi-Jing, Wu Zhi-Xin. Investigation of global optimization energy management strategy of HEV based on PMP. China Mechanical Engineering, 2014, 25(1):138-141 doi: 10.3969/j.issn.1004-132X.2014.01.026 [8] 夏超英, 张聪.混合动力系统能量管理策略的实时优化控制算法.自动化学报, 2015, 41(3):508-517 http://www.aas.net.cn/CN/abstract/abstract18629.shtmlXia Chao-Ying, Zhang Cong. Real-time optimization control algorithm of energy management strategy for hybrid electric vehicles. Acta Automatica Sinica, 2015, 41(3):508-517 http://www.aas.net.cn/CN/abstract/abstract18629.shtml [9] Santucci A, Sorniotti A, Lekakou C. Power split strategies for hybrid energy storage systems for vehicular applications. Journal of Power Sources, 2014, 258:395-407 doi: 10.1016/j.jpowsour.2014.01.118 [10] Masih-Tehrani M, Ha'iri-Yazdi M R, Esfahanian V, Safaei A. Optimum sizing and optimum energy management of a hybrid energy storage system for lithium battery life improvement. Journal of Power Sources, 2013, 244:2-10 doi: 10.1016/j.jpowsour.2013.04.154 [11] Schneider M, Biel K, Pfaller S, Schaede H, Rinderknecht S, Glock C H. Optimal sizing of electrical energy storage systems using inventory models. Energy Procedia, 2015, 73:48-58 doi: 10.1016/j.egypro.2015.07.559 [12] 张培建, 吴建国.基于在线辨识的特征模型预测函数控制研究.计算机仿真, 2010, 27(11):299-302 doi: 10.3969/j.issn.1006-9348.2010.11.076Zhang Pei-Jian, Wu Jian-Guo. Research of characteristic model predictive functional control based on on-line identification. Computer Simulation, 2010, 27(11):299-302 doi: 10.3969/j.issn.1006-9348.2010.11.076 [13] Su X Y, Zhou W S, von Bally G, Vukicevic D. Automated phase-measuring profilometry using defocused projection of a Ronchi grating. Optics Communications, 1992, 94(6):561-573 doi: 10.1016/0030-4018(92)90606-R [14] 夏超英, 杜智明.丰田PRIUS混合动力汽车能量优化管理策略仿真分析.吉林大学学报(工学版), 2017, 47(2):373-383 http://d.old.wanfangdata.com.cn/Periodical/jlgydxzrkxxb201702005Xia Chao-Ying, Du Zhi-Ming. Simulation analysis on energy optimization strategy for Toyota PRIUS hybrid electric vehicle. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(2):373-383 http://d.old.wanfangdata.com.cn/Periodical/jlgydxzrkxxb201702005 [15] 秦大同, 杨官龙, 刘永刚, 林毓培.插电式混合动力汽车能耗优化控制策略的研究.汽车工程, 2015, 37(12):1366-1370, 1377 doi: 10.3969/j.issn.1000-680X.2015.12.002Qin Da-Tong, Yang Guan-Long, Liu Yong-Gang, Lin Yu-Pei. A research on energy consumption optimization control strategy for plug-in hybrid electric vehicle. Automotive Engineering, 2015, 37(12):1366-1370, 1377 doi: 10.3969/j.issn.1000-680X.2015.12.002 [16] 雷嗣军, 宋小文.遗传算法与ADVISOR联合优化仿真汽车动力传动系统.机械科学与技术, 2010, 29(9):1137-1141 http://www.cnki.com.cn/Article/CJFDTOTAL-JXKX201009003.htmLei Si-Jun, Song Xiao-Wen. Optimization of an automobile transmission system with genetic algorithm and ADVISOR. Mechanical Science and Technology for Aerospace Engineering, 2010, 29(9):1137-1141 http://www.cnki.com.cn/Article/CJFDTOTAL-JXKX201009003.htm [17] 李宝磊, 施心陵, 苟常兴, 吕丹桔, 安镇宙, 张榆锋.多元优化算法及其收敛性分析.自动化学报, 2015, 41(5):949-959 http://www.aas.net.cn/CN/abstract/abstract18669.shtmlLi Bao-Lei, Shi Xin-Ling, Gou Chang-Xing, Lv Dan-Ju, An Zhen-Zhou, Zhang Yu-Feng. Multivariant optimization algorithm and its convergence analysis. Acta Automatica Sinica, 2015, 41(5):949-959 http://www.aas.net.cn/CN/abstract/abstract18669.shtml [18] 王琪, 孙玉坤, 黄永红.一种蓄电池-超级电容器复合电源型混合动力汽车制动力分配策略研究.电工技术学报, 2014, 29(S1):155-163 http://d.old.wanfangdata.com.cn/Conference/8625048Wang Qi, Sun Yu-Kun, Huang Yong-Hong. Research on a distribution strategy of braking force used in hybrid electric vehicles with battery-ultracapacitor hybrid energy storage system. Transactions of China Electrotechnical Society, 2014, 29(S1):155-163 http://d.old.wanfangdata.com.cn/Conference/8625048 -

 下载:
下载:

计量
- 文章访问数: 2904
- HTML全文浏览量: 522
- PDF下载量: 665
- 被引次数: 0
