

Economic Model Predictive Control for Global Optimal Operation of Nonlinear Switching Systems
-
摘要: 切换非线性系统在不同模式间平稳切换和经济切换是全局优化运行的主要需求.针对不同模式有限时域下控制算法可行域未必存在交集的系统,提出了对应的经济预测控制算法(Economic model predictive control,EMPC)及切换策略.切换发生时,该方法在实时优化层求解和更新可行中间点,并构造基于耗散的局部EMPC辅助性能指标,在考虑中间点稳定性问题上使其尽可能逼近原经济性能.在先进控制层,利用局部EMPC将状态逐次稳定至中间点,同时利用中间点问题得到的最优轨迹保证模式间的经济切换.最后,分析了切换过程的暂态经济性.该方法实际可操作性强,仿真结果说明了方法的有效性.Abstract: In this work, an economic model predictive control (EMPC) and corresponding switching strategy for nonlinear switching systems are presented to handle the unreachable problem between mode transitions. An open-loop optimal transition for systems to prepare for upcoming switching is proposed. The corresponding calculation is done in the RTO layer, and optimal mid points and trajectories are updated in due time. Systems states are driven to the mid points respectively in the preparation phase and transition to the succeeding mode is complished in the switching phase by a switching scheme. Both optimal steady-states and mid points' asymptotic stability in the related mode are insured by a dissipativity based EMPC with auxiliary controlling index, and simultaneously a computational upper bound is established for best improving the transition economic performance. Transient performance analysis and simulation result have verified the validity of the method.
-
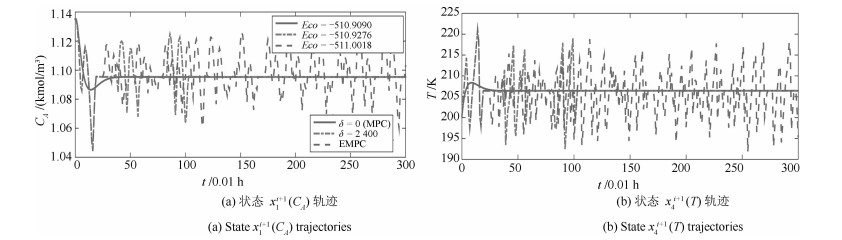
图 2 $({\pmb x}_i^s,u_i^s)$ 在不同控制器下的稳定性
Fig. 2 Stability of $({\pmb x}_i^s,u_i^s)$ under different controller
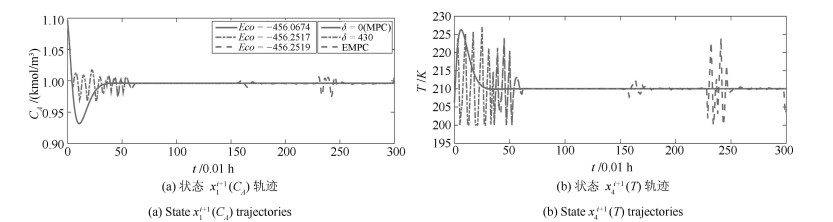
图 3 $({\pmb x}_{i+1}^*,u_{i+1}^*)$ 在不同控制器下的稳定性
Fig. 3 Stability of $({\pmb x}_{i+1}^*,u_{i+1}^*)$ under different controller
-
[1] Flemming T, Bartl M, Li P. Set-point optimization for closed-loop control systems under uncertainty. Industrial & Engineering Chemistry Research, 2007, 46(14): 4930-4942 doi: 10.1021/ie061540t [2] Liberzon D, Morse A S. Basic problems in stability and design of switched systems. IEEE Control Systems, 1999, 19(5): 59-70 doi: 10.1109/37.793443 [3] Hespanha J P, Morse A S. Stability of switched systems with average dwell-time. In: Proceedings of the 38th IEEE Conference on Decision and Control. Phoenix, AZ, USA: IEEE, 1999, 3: 2655-2660 [4] 李少远, 席裕庚.多模型预测控制的平滑切换.上海交通大学学报, 1999, 33(11): 1345-1347 doi: 10.3321/j.issn:1006-2467.1999.11.005Li Shao-Yuan, Xi Yu-Geng. Switching smoothly of multi-model predictive control systems. Journal of Shanghai Jiaotong University, 1999, 33(11): 1345-1347 doi: 10.3321/j.issn:1006-2467.1999.11.005 [5] 林相泽, 李世华, 邹云.非线性切换系统不变集的输出反馈镇定.自动化学报, 2008, 34(7): 784-791 http://www.aas.net.cn/CN/abstract/abstract17942.shtmlLin Xiang-Ze, Li Shi-Hua, Zou Yun. Output feedback stabilization of invariant sets for nonlinear switched systems. Acta Automatica Sinica, 2008, 34(7): 784-791 http://www.aas.net.cn/CN/abstract/abstract17942.shtml [6] 柴天佑, 张亚军.基于未建模动态补偿的非线性自适应切换控制方法.自动化学报, 2011, 37(7): 773-786 http://www.aas.net.cn/CN/abstract/abstract17475.shtmlChai Tian-You, Zhang Ya-Jun. Nonlinear adaptive switching control method based on unmodeled dynamics compensation. Acta Automatica Sinica, 2011, 37(7): 773-786 http://www.aas.net.cn/CN/abstract/abstract17475.shtml [7] Wan Z Y, Kothare M V. Efficient scheduled stabilizing output feedback model predictive control for constrained nonlinear systems. IEEE Transactions on Automatic Control, 2004, 49(7): 1172-1177 doi: 10.1109/TAC.2004.831122 [8] Diehl M, Amrit R, Rawlings J B. A Lyapunov function for economic optimizing model predictive control. IEEE Transactions on Automatic Control, 2011, 56(3): 703-707 doi: 10.1109/TAC.2010.2101291 [9] Amrit R, Rawlings J B, Angeli D. Economic optimization using model predictive control with a terminal cost. Annual Reviews in Control, 2011, 35(2): 178-186 doi: 10.1016/j.arcontrol.2011.10.011 [10] Grüne L. Economic receding horizon control without terminal constraints. Automatica, 2013, 49(3): 725-734 doi: 10.1016/j.automatica.2012.12.003 [11] Heidarinejad M, Liu J F, Christofides P D. Economic model predictive control of nonlinear process systems using Lyapunov techniques. AIChE Journal, 2012, 58(3): 855-870 doi: 10.1002/aic.v58.3 [12] Heidarinejad M, Liu J F, Christofides P D. Economic model predictive control of switched nonlinear systems. Systems & Control Letters, 2013, 62(1): 77-84 https://www.researchgate.net/publication/257012464_Economic_model_predictive_control_of_switched_nonlinear_systems [13] 何德峰.约束非线性系统稳定经济模型预测控制.自动化学报, 2016, 42(11): 1680-1690 http://www.aas.net.cn/CN/abstract/abstract18957.shtmlHe De-Feng. Stabilizing economic model predictive control of constrained nonlinear systems. Acta Automatica Sinica, 2016, 42(11): 1680-1690 http://www.aas.net.cn/CN/abstract/abstract18957.shtml [14] He D F, Sun J, Yu L. Economic MPC with a contractive constraint for nonlinear systems. International Journal of Robust and Nonlinear Control, 2016, 26(18): 4072-4087 doi: 10.1002/rnc.v26.18 [15] Liu S, Liu J F. Economic model predictive control for scheduled switching operations. In: Proceedings of the 2016 American Control Conference (ACC). Boston, MA, USA: IEEE, 2016. 1784-1789 [16] Liu S, Liu J F. Economic model predictive control with extended horizon. Automatica, 2016, 73: 180-192 doi: 10.1016/j.automatica.2016.06.027 [17] Angeli D, Amrit R, Rawlings J B. On average performance and stability of economic model predictive control. IEEE Transactions on Automatic Control, 2012, 57(7): 1615-1626 doi: 10.1109/TAC.2011.2179349 [18] Grüne L, Stieler M. Asymptotic stability and transient optimality of economic MPC without terminal conditions. Journal of Process Control, 2014, 24(8): 1187-1196 doi: 10.1016/j.jprocont.2014.05.003 [19] Flores-Tlacuahuac A, Moreno S T, Biegler L T. Global optimization of highly nonlinear dynamic systems. Industrial & Engineering Chemistry Research, 2008, 47(8): 2643-2655 -

 下载:
下载:


图(4)
计量
- 文章访问数: 3310
- HTML全文浏览量: 408
- PDF下载量: 870
- 被引次数: 0
