

Adaptive Finite Time Dynamic Positioning Control of Fully-actuated Ship With Servo System Uncertainties
-
摘要: 针对全驱动水面船舶动力定位控制问题,假设船舶模型参数摄动和外部扰动的上界已知,通过构造误差信号的非奇异终端滑模面(Non-singular terminal sliding mode,NTSM)提出了一种自适应终端滑模的控制方法.同时考虑伺服系统增益不确定问题,对未知的推力系数矩阵的倒数进行参数自适应,确保设计的控制器能使得船舶的位置及艏向角在有限时间内收敛于期望值,且能保证闭环系统实际有限时间稳定(Practical finite-time stable,PFS).利用一艘供给船进行数值仿真研究,说明了设计的船舶动力定位自适应终端滑模控制律的有效性.Abstract: In order to tackle the dynamic positioning problem of fully actuated ships, an adaptive terminal sliding mode control scheme is proposed by assuming that the upper bound of ship model's uncertainties and environmental disturbances are known and by constructing the non-singular terminal sliding manifold (NTSM) through error dynamics. Considering the servo system gain uncertainties, the unknown thrust constant matrix is transformed into reciprocal and parametric adaptive method is used to make sure that the position and yaw angle of fully actuated ships can converge to the desired values in a finite time, and the closed-loop system is practically finite-time stable (PFS). Simulation results of a supply vessel show the effectiveness of the adaptive terminal sliding mode control scheme.
-
由于海洋资源开发和海洋工程作业的需要, 人们对于深海作业的浮式生产系统(半潜平台、生产油船、供给船等)的定位方式日益重视.船舶动力定位技术是指在不借助锚泊系统的情况下, 船舶利用自身的推进装置抵御风、浪、流等外界扰动的影响, 以一定的姿态保持在海面某一目标位置或精确地跟踪某一轨迹, 以完成各种作业的功能[1-3].它具有不受海水深度影响、定位准确快速等优点.由于水面船舶不可避免地将遭受如风、浪和流等外部环境带来的强扰动, 以及复杂的水动力的不确定性, 给控制器的设计带来巨大的困难[4-6].同时, 船舶的纵荡, 横荡和艏摇三个自由度之间存在着强耦合, 且其中任一自由度的不稳定都将对整个系统造成巨大影响, 所以要求三个自由度同时稳定[7]. Do [8]基于李雅普诺夫直接法提出了一种输出反馈的控制方法, 通过构造自适应观测器来估计船舶的速度和未知参数, 设计的控制器能够迫使船舶位置和艏向角渐近稳定于期望值. Du等[9]采用高增益观测器对船舶的位置和艏向角进行估计, 并引入径向基函数(Radial basis function, RBF)神经网络补偿船舶模型的不确定性, 设计的控制器不需要模型和外界扰动的先验知识.王元慧等[10]基于非线性模型预测控制技术设计了船舶动力定位控制器, 并通过仿真验证了非线性模型预测控制器的有效性. Hassani等[11]提出了一种基于多模型的滤波理论的反馈控制方法, 通过对时变海洋环境中的高频部分进行滤波, 使船舶在恶劣海况下的动力定位性能得到显著提高. Grovlen等[12]通过引进矢量逆推的概念, 在控制器设计过程中忽略了时变环境扰动的影响, 从而简化了船舶动力定位控制律逆推方法, 并且得到全局指数稳定的结果.以上研究大多得到的是渐近稳定或指数稳定的控制结果, 鲜有基于有限时间理论[13]的船舶动力定位控制方法的相关文献.为此, 在考虑伺服系统增益不确定的前提下, 针对模型参数不确定、外部扰动未知的船舶动力定位控制问题, 本文提出了一类自适应非奇异终端滑模的控制方法, 并通过Lyapunov稳定性理论证明了闭环系统是实际有限时间稳定的, 最后采用一艘供给船进行数值仿真实验, 证明了所设计控制器的有效性.本文的创新点主要有: 1)设计了一种终端滑模的控制方法, 实现了船舶动力定位系统运动学回路和动力学回路的双环有限时间稳定, 且收敛精度高, 鲁棒性强; 2)针对伺服系统的增益不确定问题引入自适应参数学习律, 避免了再在执行部分构建控制命令--执行变量之间的闭环, 得到了控制输入为实际可测螺距变量的结果, 更易于工程实现.
1. 问题描述与预备知识
1.1 预备知识
为了方便后续分析, 这里给出有限时间稳定的相关定义和引理[14-17].考虑如下非线性系统:
$ \dot{\pmb{x}}={{\pmb f}({\pmb x}, {\pmb u})}, \quad \pmb{x}\in {\bf R}^n $
(1) 其中, $\pmb{x}$为状态变量, $\pmb{u}$为输入变量, ${{\pmb f}({\pmb x})}$为连续函数, 且$f(0)$ $=$ $0$.如果系统(1)是Lyapunov稳定的, 且存在时间函数${{ T}({\pmb x})}$, 使得对于所有的${t}\geq {{T}({\pmb x})}$的${{\pmb x}({ t})}=0$恒成立, 则称系统(1)是有限时间稳定的[14].
如果对于任意$x(t_0)=x_0$, 存在$\epsilon >0$和$T(\epsilon, x_0) < \infty$, 使得对于所有$t\geq t_0+T$的$\|{{\pmb x}({t})} \| < \epsilon$恒成立, 则可以说明这个非线性系统是实际有限时间稳定的(Practical finite-time stable, PFS).
引理1.针对式(1)描述的系统, 假设存在连续可微的正定函数$V(\pmb{x})$, 标量$\lambda>0$, $0 < \alpha < 1$和$0 < \zeta < \infty$, 使得式$V(\pmb{x})\leq -\lambda V^{\alpha}(\pmb{x})+\zeta$成立, 则可以说系统$\dot{\pmb{x}}={{\pmb f}({\pmb x}, {\pmb u})}$是PFS的[15].且到达时间为
$ T_{\rm reach}\leq\frac{V^{1-\alpha}({\pmb x}_0)}{\lambda\theta_0(1-\alpha)} $
(2) 其中, $0\leq\theta_0\leq1$, $V({\pmb x}_0)$为$V(\pmb{x})$的初始值.
引理2.对于任意实数$x_i$, 如果存在$r\in(0, 1)$, 则有下述不等式成立[16]:
$ \sum\limits_{i=1}^3|x_i|^{1+r}\leq\left(\sum\limits_{i=1}^3|x_i|^2\right)^{\frac{r+1}{2}} $
(3) 引理3.对于任意实数$x_i$, 如果存在$r\in(0, 1)$, 则有下述不等式成立[17]:
$ (|x_1|+\cdots+|x_n|)^b\leq|x_1|^b+\cdots+|x_n|^b $
(4) 1.2 动力定位船舶的数学模型
假设动力定位船舶是左右对称的, 只考虑船舶前进、横漂和艏摇3个自由度的平面运动, 则动力定位船舶的非线性模型为
$ \dot{\pmb{\eta}}={{\pmb R}({\pmb \psi})}\pmb{v} $
(5) $ \pmb{M}\dot{\pmb{v}}+\pmb{N}(\pmb{v})\pmb{v}=\pmb{\tau}+{{\pmb \tau}_w} $
(6) $ \pmb{\tau}=T(\beta)\pmb{{\kappa}}(n){{\pmb u}_p} $
(7) $ {{\pmb R}({\pmb \psi})}=\left[ \begin{array}{ccc} \cos{\psi} &-\sin(\psi)&0 \\ \sin{\psi} & \cos{\psi}&0 \\ 0&0&1\\ \end{array} \right] $
(8) 其中, $\pmb{\eta}=[x, y, \psi]^{\rm{T}}\in {\bf R}^3$为船舶位置, 由大地坐标系下的船舶横向位置$x$、纵向位置$y$和艏向角$\psi$组成; $\pmb{v}=[u, v, r]^{\rm{T}}\in {\bf R}^3$为船舶速度, 由随船坐标系下的前进速度$u$、横漂速度$v$和艏摇角速度$r$组成; ${{\pmb R}({\pmb \psi})}$为大地坐标系和随船坐标系之间的旋转矩阵. $\pmb{M}$为包含水动力附加惯性的惯性矩阵, 且为可逆的对称正定矩阵; $\pmb{N}(\pmb{v})\pmb{v}$是包含科氏力、离心力和非线性阻尼项的非线性水动力矩阵, 在控制器的设计过程中, $\pmb{M}$和$\pmb{N}(\pmb{v})\pmb{v}$的结构和参数是未知的.
$ \pmb{M}=\left[ \begin{array}{ccc} m-X_{\dot{u}} & 0&0 \\ 0 & m-Y_{\dot{v}}& mx_G-Y_{\dot{r}}\\ 0&mx_G-Y_{\dot{r}}&I_z-Nr\\ \end{array} \right] $
(9) $ \pmb{N}(\pmb{v})\pmb{v}=\notag\\ \left[ \begin{array}{c} -X_uu-X_{|u|u}|u|u+Y_{\dot{v}}v|r|+Y_{\dot{r}}rr \\ -X_{\dot{u}}ur-Y_vv-Y_{|v|v}|v|v-Y_{|v|r}|v|r\\ (X_{\dot{u}}\!-\! Y_{\dot{v}})uv\!-\! Y_{\dot{r}}ur\!-\!N_vv\!-\!N_rr\!-\!N_{|v|v}|v|v\!-\!N_{|v|r}|v|r\\ \end{array} \right] $
(10) $\pmb{\tau}=[\tau_u, \tau_v, \tau_r]^{\rm{T}}$为执行器(本文包括侧推器和主推进器)提供的控制力或力矩, 式(7)给出了简要的推力分配模型. ${{\pmb \tau}_w}=[\tau_{wu}, \tau_{wv}, \tau_{wr}]^{\rm{T}}$为风、浪、流产生的外界扰动. $T(\cdot)$ $\in$ $ \boldsymbol{R}^{3\times q}$为与船舶推进器位置相关的矩阵($q$代表相应推进器的数量). $\pmb{\kappa}(\cdot)={\rm diag}\{k_1(n_1), k_2(n_2), \cdots, k_q(n_q)\}\in \boldsymbol{R}^{q\times q}$为调距桨推力系数矩阵, 其大小取决于螺旋桨的速度$n_i$, $i=$ $1, 2, \cdots, q$, 由于船舶航行时产生的伴流及螺旋桨和船体之间的流场存在相互作用, 导致$\pmb{\kappa}(\cdot)$的值是不可测的. ${{\pmb u}_p}=$ $[|p_1|p_1, |p_2|p_2, \cdots, |p_q|p_q]^{\rm{T}}$为实际螺距输入, 其中$p_i\in [-1$, $1]$, $i=1, 2, \cdots, q$为调距桨的可变螺距值.
假设1.惯性矩阵为$\pmb{M}$是正定可逆的对称矩阵, 即$\pmb{M}$ $=$ $\pmb{M}^{\rm{T}}>0$.该假设与水面船舶船体左右, 前后近似对称的特性是相符的.
假设2. $\pmb{M}$和$\pmb{N}(\pmb{v})$为未知模型参数矩阵且上界已知, 其满足下列条件:
$ \|\bar{\pmb{M}}-\hat{\pmb{M}}\|\leq\triangle \pmb{M}, \quad \|\bar{\pmb{N}}(\pmb{v})-\hat{\pmb{N}}(\pmb{v})\|\leq\triangle \pmb{N}(\pmb{v}) $
(11) 其中, $\hat{(\cdot)}$表示参数矩阵的估计值, $\bar{(\cdot)}$表示参数矩阵的上界.
假设3.在式(6)中, ${{\pmb \tau}_w}$为上界已知的扰动, 即存在向量$\bar{\pmb{\tau}}_w=[\bar{\tau}_{wu}, \bar{\tau}_{wv}, \bar{\tau}_{wr}]^{\rm{T}}>0$且$|{{\pmb \tau}_w}|\leq\bar{\pmb{\tau}}_w$.
注1.考虑实际海洋工程中主机提供给推进器的能量是有限的, 因此, 对于特定的船舶来说, 推力系数矩阵必须满足$0$ $ < $ $\underline{k}_i\leq k_i(n_i)\leq\overline{k}_i$, $i=1, 2, \cdots, q$. $\underline{k}_i$和$\overline{k}_i$为未知常量且仅用于稳定性分析.
2. 非奇异终端滑模控制器设计
将船舶动力定位系统的控制器设计分为两步.首采用Lyapunov直接法设计运动学回路的有限时间虚拟控制律; 然后基于非奇异终端滑模的方法设计系统的动力学回路控制器, 同时考虑船舶动力定位系统执行器的增益不确定问题, 最终设计出符合海洋工程实践, 控制输入为调距桨可变螺距的船舶动力定位自适应有限时间控制律.
步骤1.船舶动力定位的期望轨迹为${\pmb{\eta}_d}=[x_d, y_d, \psi_d]^{\rm{T}}$, 定义船舶动力定位的位置误差为
$ {\pmb{\eta}_e}={\pmb{\eta}_d}-\pmb{\eta} $
(12) 对时间求导, 可得
$ \dot{\pmb{\eta}}_e=-\pmb{R}(\psi)\pmb{v} $
(13) 将$v$视为虚拟控制向量, 选择镇定函数向量$\alpha_v$为
$ \pmb{\alpha}_v=\pmb{R}^{-1}(\psi)\pmb{\chi}{\pmb{\eta}^r_e} $
(14) 式中, $\pmb{\chi}$为位置误差的正定对称设计矩阵, 且$0 < r < 1$.则
$ \pmb{v}_e=\pmb{\alpha}_v-\pmb{v} $
(15) 根据式(6)对$\pmb{v}_e$求导
$ \dot{\pmb{v}}_e=\pmb{M}^{-1}[\pmb{M}\dot{\pmb{\alpha}}_v+\pmb{N}(\pmb{v})-\pmb{\tau}-{{\pmb \tau}_w}] $
(16) 步骤2.设计如下非奇异终端滑模面:
$ \pmb{s}=\int_0^t\pmb{v}_e(\tau){\rm d}\tau+\pmb{\mu}|\pmb{v}_e|^{c}{\rm{sgn}}(\pmb{v}_e) $
(17) 其中, $p$为正整数且满足$0 < c < 2$, $\pmb{\mu}=\rm{diag}\{\ell_1, \ell_2, \ell_3\}$为正定的设计参数矩阵. $|\pmb{v}_e|^{c}$表示向量的分数次幂$|\pmb{v}_e|^{c}=$ $(|v_{e1}|^{c}$, $|v_{e2}|^{c}$, $|v_{e3}|^{c})$.
对非奇异终端滑模面(17)求导得
$ \dot{\pmb{s}}=\pmb{v}_e+\pmb{\Theta}\dot{\pmb{v}}_e $
(18) 其中, $\pmb{\Theta}=\pmb{\mu}c|\pmb{v}_e|^{c-1}$.
根据式(16)和式(18), 得
$ \pmb{M}\dot{\pmb{s}}= \pmb{M}\pmb{v}_e+\pmb{M}\pmb{\Theta}\dot{\pmb{v}}_e=\\ \;\;\;\;\;\;\pmb{M}\pmb{v}_e+\pmb{\Theta}[\pmb{M}\dot{\pmb{\alpha}}_v+\pmb{N}(\pmb{v})-\pmb{\tau}-{{\pmb \tau}_w}] $
(19) 考虑在海洋工程实践中$\pmb{\kappa}(\cdot)$是未知的且会带来系统增益不确定性, 为了确定$\pmb{\kappa}(\cdot)$的值的大小, 引进$\hat{\lambda}$来估计$\pmb{\kappa}(\cdot)$的倒数$1/k_i(n_i)$, $i=1, 2, \cdots, q$.
根据式(7)得:
$ {{\pmb u}_p}=\hat{\lambda}T^{\dagger}(\beta)\pmb{\alpha}_p $
(20) 其中,
$ \hat{\lambda}T^{\dagger}(\beta)\pmb{\alpha}_p=\lambda T^{\dagger}(\beta)\pmb{\alpha}_p-\tilde{\lambda}T^{\dagger} (\beta)\pmb{\alpha}_p $
(21) 其中, $\pmb{\alpha}_p$是控制律, $T^{\dagger}(\cdot)$是$T(\cdot)$的伪逆矩阵, $\hat{\lambda}$是$\lambda$的估计值且$\lambda_i=k_i^{-1}$.则非奇异终端滑模控制律设计为
$ \pmb{\alpha}_p=\hat{\pmb{M}}\dot{\pmb{\alpha}}_v+\hat{\pmb{N}}(\pmb{v})+\pmb{\Theta}^{-1}\hat{\pmb{M}}\pmb{v}_e+\pmb{\Phi}{\rm{sat}}\left(\frac{\pmb{s}}{\triangle}\right) $
(22) $\pmb{\Phi}$为待设计与状态有关的函数.设计函数$\pmb{\Phi}$为
$ \pmb{\Phi}= \triangle \pmb{M}(\dot{\pmb{\alpha}}_v+\pmb{\Theta}^{-1}\pmb{v}_e)+\triangle \pmb{N}(\pmb{v})-\bar{\pmb{\tau}}_{w} +\\ (\pmb{s}^{\rm{T}}\pmb{\Theta})^{-1}{\pmb{\eta}_e}^{\rm{T}} {{\pmb R}({\pmb \psi})}\pmb{v}_e+\varsigma \pmb{s}^r $
(23) 其中, $\varsigma>0$.
注2.上述控制器设计时, 由于在滑模面设计时引入了符号函数, 必然会引起系统高频振动, 因此采用饱和函数代替符号函数消除抖动[18-19].定义饱和函数的形式如下:
$ {\rm{sat}}\left(\frac{\pmb{s}}{\triangle}\right)= \begin{cases} \frac{\pmb{s}}{\triangle}, & \mbox{当}~|\pmb{s}|\leq\triangle\\ \rm{sgn}(\pmb{s}), &\mbox{当}~|\pmb{s}|>\triangle \end{cases} $
(24) 其中, $\triangle$为边界层厚度.
由式(7)和式(21)得
$ \pmb{p}={\rm{sgn}}({{\pmb u}_p})\sqrt{|{{\pmb u}_p}|}\\ {{\pmb u}_p}={\rm{diag}}\{\hat{\lambda}_1, \hat{\lambda}_2, \cdots, \hat{\lambda}_q\}T^{\dagger}(\beta)\pmb{\alpha}_p $
(25) 其中, $\pmb{p}=[p_1, p_2, \cdots, p_q]^{\rm{T}}$为指定螺距输入.
根据文献[20]的方法在线更新$\hat{\lambda}$的值.相应的自适应律为
$ \dot{\hat{\lambda}}_i=\gamma\left[s_n^{\rm{T}}\pmb{\Theta}_n\sum\limits_{n=u, v, r}\sum\limits_{n=u, v, r}T^{\dagger}_{ij}(\cdot)T_{ij}(\cdot)n_e\alpha_j-\varepsilon_0\hat{\lambda}_i\right] $
(26) 3. 系统稳定性分析
定理1.考虑执行器增益不确定问题, 针对已知模型参数不确定上界和外部扰动上界的船舶动力定位系统(5), (6), (7), 在终端滑模控制律(22)及自适应律(26)的作用下, 船舶闭环系统内的状态在有限时间内收敛到且保持在期望值的一个领域内.
证明.构造系统的Lyapunov函数:
$ V=\frac12{{\pmb\eta}^{\rm{T}}_e}{\pmb{\eta}_e}+\frac12{\pmb s}^{\rm{T}}{\pmb M}{\pmb s}+\frac12\sum\limits_{i=1}^q\frac{k_i}{\gamma}\tilde{\lambda}_i^2 $
(27) 将$V$对$t$求导得:
$ \qquad\dot{V}= -{\pmb{\eta}^{\rm{T}}_e}\pmb{\chi}\pmb{\eta}^r_e+ {\pmb{\eta}^{\rm{T}}_e}{{\pmb R}({\pmb \psi})}\pmb{v}_e+\sum\limits_{i=1}^q\frac{k_i} {\gamma}\tilde{\lambda}_i\dot{\hat{\lambda}}_i +\\ \pmb{s}^{\rm{T}}\pmb{\Theta}[\pmb{M}\dot{\pmb{\alpha}}_v+\pmb{N}(\pmb{v}) +\Theta^{-1}\pmb{M}\pmb{v}_e-\pmb{\tau}-{{\pmb \tau}_w}]=\\ -{\pmb{\eta}^{\rm{T}}_e}\chi{\pmb{\eta}^r_e}+\pmb{s}^{\rm{T}}\pmb{\Theta} [\pmb{M}\dot{\pmb{\alpha}}_v+\pmb{N}(\pmb{v})-\pmb{\tau}-{{\pmb \tau}_w} +\\ \pmb{\Theta}^{-1}\pmb{M}\pmb{v}_e+(\pmb{s}^{\rm{T}}\pmb{\Theta})^{-1} {\pmb{\eta}^{\rm{T}}_e}{{\pmb R}({\pmb \psi})}\pmb{v}_e]+\sum\limits_{i=1}^q\frac{k_i} {\gamma}\tilde{\lambda}_i\dot{\hat{\lambda}}_i $
(28) 将控制律(22)和自适应律(26)代入上式, 得
$ \dot{V}\leq -\sigma_1\left(\frac12{\pmb{\eta}^{\rm{T}}_e} {\pmb{\eta}_e}\right)^{\frac{r+1}{2}}-\sigma_2\left(\frac12\pmb{M}\| \pmb{s}\|\right)^{\frac{r+1}{2}} +\\ \sum\limits_{i=1}^q\varepsilon_0k_i\tilde {\lambda}_i\hat{\lambda}_i+\sigma_3\left(\frac12\sum\limits_{i=1}^q\frac{k_i} {\gamma}\tilde{\lambda}^2_i\right)^{\frac{r+1}{2}} +\\ \left(\frac{\gamma\varepsilon_0(2\xi_0-1)}{2\xi_0}\sum\limits_{i=1}^q \frac{k_i}{\gamma}\tilde{\lambda}_i\right)^{\frac{r+1}{2}}\leq-\alpha V_3^{\frac{r+1}{2}} +\\ \left(\frac{\gamma\varepsilon_0(2\xi_0-1)}{2\xi_0}\sum\limits_{i=1}^q\frac{k_i}{\gamma}\tilde{\lambda}_i^2\right)^{\frac{r+1}{2}}+\sum\limits_{i=1}^q\varepsilon_0k_i\tilde{\lambda}_i\hat{\lambda}_i $
(29) 其中,
$ \alpha=\min(\sigma_1, \sigma_2, \sigma_3)\\ \sigma_1=2^{\frac{r+1}{2}}\pmb{\chi} \\ \sigma_2=\frac{\pmb{\Theta}}{\left(\frac12\lambda_{\max}(\pmb{M})\right)^{\frac{r+1}{2}}}\\ \sigma_3=\frac{\gamma\varepsilon_0(2\xi_0-1)}{\xi_0\sigma_2^{\frac{2}{r+1}}} $
对于任意标量$\xi_0>1/2$, 有下列不等式成立:
$ \varepsilon_0\sum\limits_{i=1}^qk_i\tilde{\lambda}_i\hat{\lambda}_i= \varepsilon_0\sum\limits_{i=1}^qk_i(\lambda_i-\tilde{\lambda}_i) \tilde{\lambda}_i\leq\\ \;\;\; -\frac{\varepsilon_0(2\xi_0-1)}{2\xi_0}\sum\limits_{i=1}^qk_i\tilde{\lambda}_i^2+\frac{\varepsilon_0\xi_0}{2}\sum\limits_{i=1}^qk_i\lambda_i^2 $
(30) 由引理3得, 若$\frac{\gamma\varepsilon_0(2\xi_0-1)}{2\xi_0}\sum_{i=1}^q\tilde{\lambda}_i^2>1$, 则有下列不等式成立:
$ \left(\frac{\gamma\varepsilon_0(2\xi_0-1)}{2\xi_0}\sum\limits_{i=1}^qk_i \tilde{\lambda}_i^2\right)^{\frac{r+1}{2}}+\varepsilon_0\sum\limits_{i=1}^qk_i \tilde{\lambda}_i\hat{\lambda}_i <\\ \frac{\gamma\varepsilon_0(2\xi_0-1)}{2\xi_0}\sum\limits_{i=1}^{q}k_i\tilde {\lambda}_i^2+\varepsilon_0\sum\limits_{i=1}^qk_i\tilde{\lambda}_i\hat {\lambda}_i\leq\\ \frac{\varepsilon_0\xi_0}{2}\sum\limits_{i=1}^qk_i\tilde{\lambda}_i^2 $
(31) 此时, $\dot{V}\leq-\alpha V^{\frac{r+1}{2}}+\rho_1$, 其中$\rho_1=\frac{\varepsilon_0\xi_0}{2}\sum_{i=1}^qk_i\tilde{\lambda}^2_i$.若$\frac{\varepsilon_0(2\xi_0-1)}{2\xi_0}\sum_{i=1}^qk_i\tilde{\lambda}_i^2\leq1$, 则下列不等式成立:
$ \left(\frac{\varepsilon_0(2\xi_0\!-\!1)}{2\xi_0} \sum\limits_{k=1}^qk_i\tilde{\lambda}_i^2\right)^{\frac{r+1}{2}}+ \varepsilon_0\sum\limits_{i=1}^qk_i\tilde{\lambda}_i\hat{\lambda}_i <\\ \;\;\; 1+\varepsilon_0\sum\limits_{i=1}^qk_i\tilde{\lambda}_i\hat{\lambda}_i $
(32) 当$\varepsilon_0$取任意小时, 可以保证$1+\varepsilon_0\sum_{i=1}^qk_i\tilde{\lambda}_i\hat{\lambda}_i\leq0. $则$\dot{V}$ $\leq$ $-\alpha V^{\frac{1+r}{2}}+\rho_2$, 其中$\rho_2=1+\varepsilon_0\sum_{i=1}^qk_i\tilde{\lambda}_i\hat{\lambda}_i. $
令$\rho=\max(\rho_1, \rho_2)$.则可将不等式写成
$ \dot{V}\leq-\alpha V^{\frac{1+r}{2}}+\rho $
(33) 由引理2可知, 系统是有限时间收敛的, 且系统的状态变量会在有限时间收敛到如下稳定域内:
$ V^{\frac{r+1}{2}}\leq\frac{\rho}{(1-\theta_0)\alpha} $
(34) 即滑模面的一个邻域内:
$ \lim\limits_{t\to T_{\rm reach}}\pmb{s}\in\notag\\ \;\;\;\left(\| \pmb{s} \| \leq\sqrt{\frac{\lambda_{\max}(\pmb{M})}{\lambda_{\min}(\pmb{M})}}\left(1-\frac{\rho}{(1-\theta_0)\lambda_{\min}(\varsigma)}\right)^{\frac{1}{r+1}}\right) $
(35) 注3.在实际海洋环境中, 船舶的航行始终会受到风、浪和流的干扰, 导致本文控制律下动力定位船舶的闭环系统为实际有限时间稳定, 这也与文献[21]相符合.实际上, 终端滑模控制器的强鲁棒性和快速收敛性可以通过增大控制器增益的方法来体现, 但单一加大控制参数势必会引起控制输入的抖增而导致执行器过载损坏.
4. 仿真研究
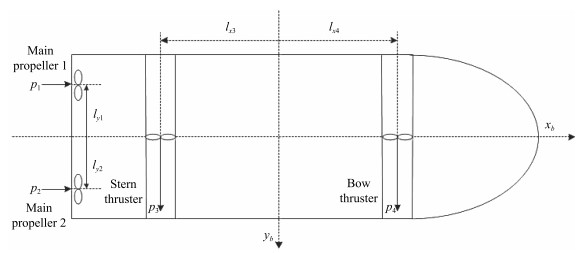
为了验证设计的船舶动力定位自适应终端滑模控制器的性能, 以一艘动力定位供给船为仿真对象进行仿真研究.该供给船的质量为$m=4.591\times 10^6$ kg, 长度为$L=76.2$ m, 配备有两个主推进器和首尾侧推, 推进器布置如图 1所示, 其中$l_{y1}=5$ m, $l_{y2}=-5$ m, $l_{x3}=25$ m, $l_{x4}=-25$ m.模型参数如下:
$ X_{\dot{u}}=-0.7212\times10^6, ~~ Y_{\dot{v}}=-3.6921\times10^6\\[1mm] Y_{\dot{r}}=-1.0234\times10^6, ~~I_z-N_{\dot{r}}=3.7454\times10^9\\ X_u=5.0242\times10^4, ~~X_{|u|u}=1.0179\times10^3\\ Y_v=2.7229\times10^5, ~~Y_r=-4.3933\times10^6\\ Y_{|v|v}=1.7860\times10^4, ~~Y_{|v|r}=-3.0068\times10^5\\ N_v=-4.3821\times10^6, ~~N_r=4.1894\times10^8\\ N_{|v|v}=-2.4684\times10^5, ~~N_{|v|r}=6.5759\times10^6 $
(36) 在仿真中, 设船舶的初始状态为${\pmb \eta}(0)=[10 \rm{m}, 10 {\rm m}$, $10^{\circ}]^{\rm{T}}, $ ${\pmb v}(0)= [0 \rm{m/s}, 0 \rm{m/s}, 0^{\circ}/\rm{s}]^{\rm{T}}$, 船舶期望目标位置为${\pmb\eta}_d$ $=$ $[-25 \rm{m}$, $40 \rm{m}, 60^{\circ}]^{\rm{T}}$; 船舶动力定位自适应终端滑模控制律的各设计矩阵参数选择为
$ \pmb{\chi}=\rm{diag}\{0.16, 0.15, 0.15\}, \;\;\pmb{\mu}=\rm{diag}\{1, 1, 1\}\\ {\pmb\varsigma}=\rm{diag}\{1, 1, 1\}, \;\;{\pmb\gamma}=[0.4, 0.4, 0.2, 0.15]\\ {\pmb\varepsilon}_0=[15, 15, 20, 18], \;\; c=5/3, \;\; r=1/2 $
本文采用文献[6]中的风、浪、流的机理模型所产生的外界环境干扰力和力矩作用于船舶模型.其中, 海浪模型和风模型是耦合的, 即风生浪模型.设置海洋环境干扰为6级, 具体参数为:风向$\psi_{\rm wind}=45^{\circ}$, 风速$V_{\rm wind}=12.\rm{5 m/s}$, 流向$\beta_{\rm cur}$ $=120^{\circ}$, 流速$V_{\rm cur}= 0.5 \rm{m/s}$.
图 2~4是动力定位船舶在两种控制律(本文有限时间控制律和文献[8]中渐近稳定控制律)下的控制效果对比, 从图中可以看出, 两种控制器均能保持系统最终稳定状态.图中实线为本文控制律下的控制结果, 虚线为文献[8]中控制律下的控制结果.
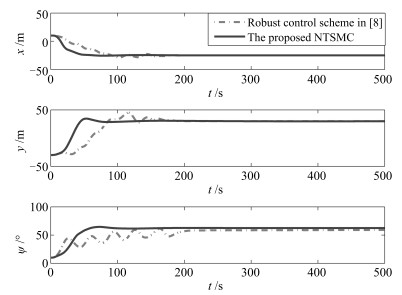 图 2 船舶的位置和艏向角$x$, $y$, $\psi$历时变化曲线Fig. 2 Position and orientation variables $x$, $y$, $\psi $ under different control laws
图 2 船舶的位置和艏向角$x$, $y$, $\psi$历时变化曲线Fig. 2 Position and orientation variables $x$, $y$, $\psi $ under different control laws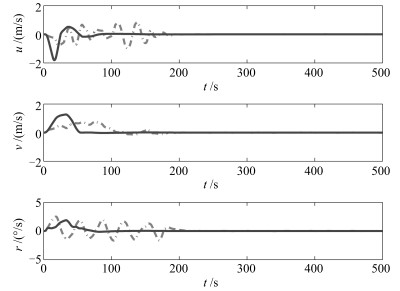 图 3 船舶速度$u$, $v$, $r$历时变化曲线Fig. 3 The kinematic variables $u$, $v$, $r$ under different control laws
图 3 船舶速度$u$, $v$, $r$历时变化曲线Fig. 3 The kinematic variables $u$, $v$, $r$ under different control laws图 2为供给船的平面位置$(x, y)$及艏向角$\psi$的变化曲线, 仿真试验表明, 两种控制律都能迫使供给船的空间位置和艏向角收敛于期望值, 且本文所设计控制器在50 s左右稳定优于文献[8]中200 s左右稳定时间, 进一步实验表明供给船在运动到期望的目标位置${\pmb\eta}_d=[-25 \rm{m}, 40 \rm{m}, 60^{\circ}]^{\rm{T}}$以后能够保持在该期望位置附近, 实现动力定位的控制目标.
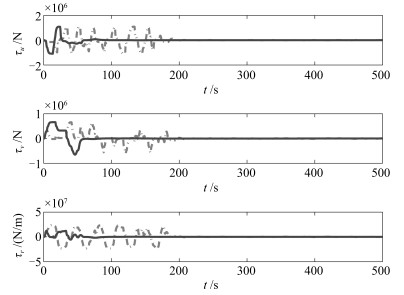
图 3和图 4分别为供给船速度和控制律历时变化曲线, 得益于终端滑模控制器强鲁棒性和高稳态精度的特点, 可以看出在本文控制律式下, 供给船的速度变量得到快速镇定.
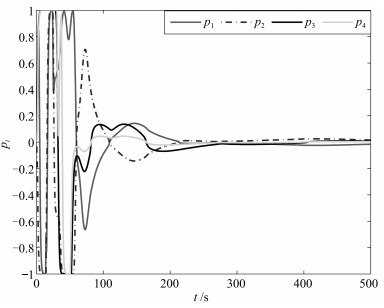
图 5增益不确定估计参数$\hat{\lambda}_1$, $\hat{\lambda}_2$, $\hat{\lambda}_3$, $\hat{\lambda}_4$历时变化曲线, 图 6是供给船的4个变距螺旋桨的螺距输入曲线, 由于本文考虑了增益不确定的自适应律设计, 不同于传统控制器得到的是控制力矩的结果, 本文得到的控制输入是调距桨实际可测螺距输入, 更加符合海洋工程实践.
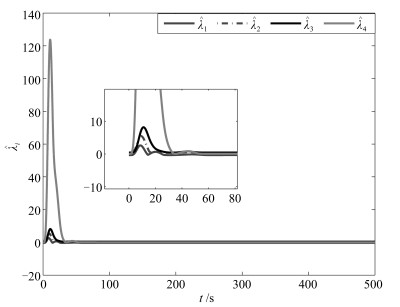 图 5 增益不确定估计参数$\hat{\lambda}_1$, $\hat{\lambda}_2$, $\hat{\lambda}_3$, $\hat{\lambda}_4$历时变化曲线Fig. 5 Curves of estimations for gain\\ uncertainties $\hat{\lambda}_1$, $\hat{\lambda}_2$, $\hat{\lambda}_3$, $\hat{\lambda}_4$
图 5 增益不确定估计参数$\hat{\lambda}_1$, $\hat{\lambda}_2$, $\hat{\lambda}_3$, $\hat{\lambda}_4$历时变化曲线Fig. 5 Curves of estimations for gain\\ uncertainties $\hat{\lambda}_1$, $\hat{\lambda}_2$, $\hat{\lambda}_3$, $\hat{\lambda}_4$5. 结论
本文针对水面船舶的动力定位问题, 考虑船舶在海洋工程实践中存在的伺服系统增益不确定现象, 通过对模型参数不确定和海洋环境扰动上界的估计, 设计了一种自适应终端滑模控制器.利用终端滑模具有有限时间收敛、鲁棒性强且收敛精度高的优点实现船舶运动学回路和动力学回路的有限时间收敛.同时对执行器的增益系数进行参数自适应, 进一步得到了控制输入为调距桨可变螺距输入的结果.借助Lyapunov稳定性理论证明了设计的自适应终端滑模控制器是实际有限时间稳定(PFS)的; 最后, 以一艘配备两个主推进器和首尾侧推的供给船进行了仿真研究, 仿真结果验证了自适应终端滑模控制器的有效性.
-
图 2 船舶的位置和艏向角$x$, $y$, $\psi$历时变化曲线
Fig. 2 Position and orientation variables $x$, $y$, $\psi $ under different control laws
图 3 船舶速度$u$, $v$, $r$历时变化曲线
Fig. 3 The kinematic variables $u$, $v$, $r$ under different control laws
图 5 增益不确定估计参数$\hat{\lambda}_1$, $\hat{\lambda}_2$, $\hat{\lambda}_3$, $\hat{\lambda}_4$历时变化曲线
Fig. 5 Curves of estimations for gain\\ uncertainties $\hat{\lambda}_1$, $\hat{\lambda}_2$, $\hat{\lambda}_3$, $\hat{\lambda}_4$
-
[1] El-Hawary F. The Ocean Engineering Handbook. Boca Raton:CRC Press, 2001. 167-170 [2] 周利, 王磊, 陈恒.动力定位控制系统研究.船海工程, 2008, 37(2):86-91 doi: 10.3963/j.issn.1671-7953.2008.02.025Zhou Li, Wang Lei, Chen Heng. Review on the study of dynamic positioning control system for vessels. Ship and Ocean Engineering, 2008, 37(2):86-91 doi: 10.3963/j.issn.1671-7953.2008.02.025 [3] 赵大威, 边信黔, 丁福光.非线性船舶动力定位控制器设计.哈尔滨工程大学学报, 2011, 32(1):57-61 doi: 10.3969/j.issn.1006-7043.2011.01.011Zhao Da-Wei, Bian Xin-Qian, Ding Fu-Guang. Design of a nonlinear controller for dynamic ship positioning. Journal of Harbin Engineering University, 2011, 32(1):57-61 doi: 10.3969/j.issn.1006-7043.2011.01.011 [4] Ghommam J, Minf F, Derbel N. Global stabilisation and tracking control of underactuated surface vessels. IET Control Theory and Applications, 2010, 4(1):71-88 doi: 10.1049/iet-cta.2008.0131 [5] Fang M C, Lee Z Y. Portable dynamic positioning control system on a barge in short-crested waves using the neural network algorithm. China Ocean Engineering, 2013, 27(4):469-480 doi: 10.1007/s13344-013-0040-x [6] Fossen T I. Handbook of Marine Craft Hydrodynamics and Motion Control. Hoboken, NJ, USA: Wiley, 2011. 152-158 [7] Zhang G Q, Zhang X K. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning. ISA Transactions, 2015, 56:75-85 doi: 10.1016/j.isatra.2014.12.002 [8] Do K D. Global robust and adaptive output feedback control for a marine dynamic positioning of surface ships. Journal of Marine Science and Application, 2011, 10(3):325-332 doi: 10.1007/s11804-011-1076-z [9] Du J L, Hu X, Liu H B, Chen C L P. Adaptive robust output feedback control for a marine dynamic positioning system based on a high-gain observer. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(11):2775-2786 doi: 10.1109/TNNLS.2015.2396044 [10] 王元慧, 隋玉峰, 吴静.基于非线性模型预测的船舶动力定位控制器设计.哈尔滨工程大学学报, 2013, 34(1):110-115 http://d.old.wanfangdata.com.cn/Periodical/hebgcdxxb201301018Wang Yuan-Hui, Sui Yu-Feng, Wu Jing. Marine dynamic position system based on nonlinear model predictive control. Journal of Harbin Engineering University, 2013, 34(1):110-115 http://d.old.wanfangdata.com.cn/Periodical/hebgcdxxb201301018 [11] Hassani V, Sorensen A J, Pascoal A M, Aguiar A P. Multiple model adaptive wave filtering for dynamic positioning of marine vessels. In: Proceedings of the 2012 American Control Conference (ACC). Montreal, Canada: IEEE, 2012. 6222-6228 [12] Grovlen A, Fossen T I. Nonlinear control of dynamic positioned ships using only position feedback: an observer backstepping approach. In: Proceedings of the 35th IEEE Conference on Decision and Control. Kobe, Japan: IEEE, 1996, 3: 3388-3393 [13] Feng Y, Yu X H, Man Z H. Non-singular terminal sliding mode control of rigid manipulators. Automatica, 2002, 38(12):2159-2167 doi: 10.1016/S0005-1098(02)00147-4 [14] Wang L Y, Chai T Y, Zhai L F. Neural-network-based terminal sliding-mode control of robotic manipulators including actuator dynamics. IEEE Transactions on Industrial Electronics, 2009, 56(9):3296-3304 doi: 10.1109/TIE.2008.2011350 [15] 穆朝絮, 余星火, 孙长银.非奇异终端滑模控制系统相轨迹和暂态分析.自动化学报, 2013, 39(6):902-908 http://www.aas.net.cn/CN/abstract/abstract18117.shtmlMu Chao-Xu, Yu Xing-Huo, Sun Chang-Yin. Phase trajectory and transient analysis for nonsingular terminal sliding mode control systems. Acta Automatica Sinica, 2013, 39(6):902-908 http://www.aas.net.cn/CN/abstract/abstract18117.shtml [16] Bhat S P, Bernstein D S. Finite-time stability of continuous autonomous systems. SIAM Journal on Control and Optimization, 2000, 38(3):751-766 doi: 10.1137/S0363012997321358 [17] 李世华, 丁世宏, 田玉平.一类二阶非线性系统的有限时间状态反馈镇定方法.自动化学报, 2007, 33(1):101-104 http://www.aas.net.cn/CN/abstract/abstract13811.shtmlLi Shi-Hua, Ding Shi-Hong, Tian Yu-Ping. A finite-time state feedback stabilization method for a class of second order nonlinear systems. Acta Automatica Sinica, 2007, 33(1):101-104 http://www.aas.net.cn/CN/abstract/abstract13811.shtml [18] 张瑶, 马广富, 郭延宁, 曾添一.一种多幂次滑模趋近律设计与分析.自动化学报, 2016, 42(3):466-472 http://www.aas.net.cn/CN/abstract/abstract18834.shtmlZhang Yao, Ma Guang-Fu, Guo Yan-Ning, Zeng Tian-Yi. A multi power reaching law of sliding mode control design and analysis. Acta Automatica Sinica, 2016, 42(3):466-472 http://www.aas.net.cn/CN/abstract/abstract18834.shtml [19] Chen W S, Jiao L C. Adaptive tracking for periodically time-varying and nonlinearly parameterized systems using multilayer neural networks. IEEE Transactions on Neural Networks, 2010, 21(2):345-351 doi: 10.1109/TNN.2009.2038999 [20] How B V E, Ge S S, Choo Y S. Dynamic load positioning for subsea installation via adaptive neural control. IEEE Journal of Oceanic Engineering, 2010, 35(2):366-375 doi: 10.1109/JOE.2010.2041261 [21] He W, Dong Y T, Sun C Y. Adaptive neural impedance control of a robotic manipulator with input saturation. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2016, 46(3):334-344 doi: 10.1109/TSMC.2015.2429555 期刊类型引用(10)
1. 祝贵兵,吴晨,马勇. 虚假数据注入式攻击下无人水面船舶自适应神经输出反馈轨迹跟踪控制. 自动化学报. 2024(07): 1472-1484 .  本站查看
本站查看2. 王元慧,张潇月,王成龙. 船舶系泊动力定位控制技术综述. 哈尔滨工程大学学报. 2023(02): 172-180 . 百度学术3. 陈正升,程玉虎,王雪松. 考虑输出约束的冗余驱动绳索并联机器人预设性能控制. 自动化学报. 2022(07): 1704-1717 . 本站查看4. 王洪斌,高静,苏博,王跃灵. 基于事件触发的AUVs固定时间编队控制. 自动化学报. 2022(09): 2277-2287 . 本站查看5. 陈海力,任鸿翔,李源惠,关巍. 基于反推滑模的船舶动力定位有限时间控制. 计算机仿真. 2021(12): 182-187+479 . 百度学术6. 陈海力,任鸿翔,杨柏丞. 基于LS-SVM的船舶动力定位有限时间控制器设计. 船舶工程. 2020(02): 77-84 . 百度学术7. 王旭阳,高迪驹,王天真,徐晓滨. 未知时变扰动和输入饱和下的智能船舶鲁棒非线性控制. 船舶工程. 2020(04): 102-108 . 百度学术8. 余玲玲,王欣,李丽,黄蔚,付明玉. 基于FTO的船舶分布式编队的有限时间控制方法. 中国舰船研究. 2020(03): 8-17+37 . 百度学术9. 王元慧,李子宜,张晓云,张潇月. 基于结构可靠性的锚泊辅助动力定位滑模控制. 船舶工程. 2020(08): 91-96 . 百度学术10. 高振宇,郭戈. 基于扰动观测器的AUVs固定时间编队控制. 自动化学报. 2019(06): 1094-1102 . 本站查看其他类型引用(19)
-

 下载:
下载:
 下载:
下载:
计量
- 文章访问数: 2136
- HTML全文浏览量: 217
- PDF下载量: 582
- 被引次数: 29
