

-
摘要: 针对加热炉多个支路出口温度的平衡及跟踪控制问题,提出具有分布式特点的支路平衡跟踪控制方案,给出了基于分布式偏差的控制器设计方法.该方法利用相邻支路的温度信息,将各支路与相邻支路的温度偏差作为控制输入,在加热炉所有支路的温度达到一致的同时,也确保其跟踪同一设定值.由于仅利用了相邻支路的温度信息,使得所提分布式偏差控制方案在支路数目较多情形下更显优势.最后仿真实例表明了该分布式控制方案的有效性与可行性.Abstract: A design method based on distributed deviation for consensus pass balancing and tracking control is proposed to overcome the limitation of existing pass temperature control schemes. Only temperature deviations of adjacent passes are involved in the control algorithm that forces the temperatures of all passes to achieve uniformity. Synchronous control of flue flow is introduced to make the outlet temperature at the set value. As only the temperature information of adjacent passes is used, the proposed control scheme is more cost effective for the cases with a large number of passes. At last, simulation results illustrate that the new controller design method is effective and the distributed deviation control scheme is feasible for a class of industrial feed heaters.
-
Key words:
- Distributed deviation /
- pass balance /
- tracking control /
- consensus control
1) 本文责任编委 阳春华 -
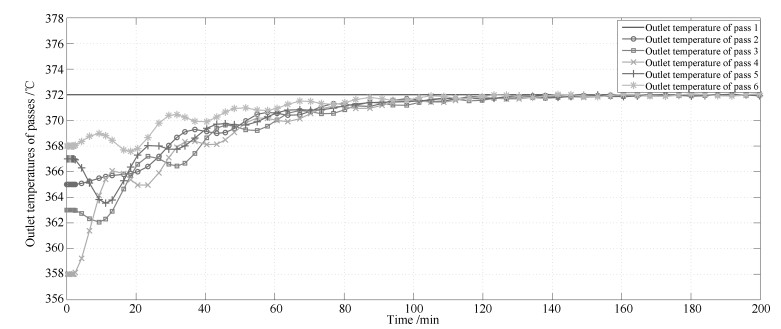
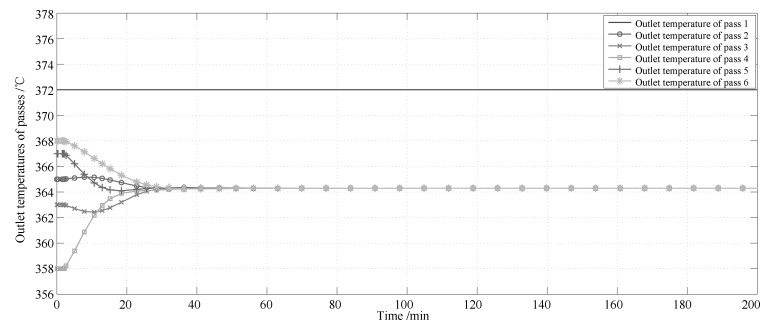
图 6 5条支路均有燃料流量控制作用的出口温度响应曲线
Fig. 6 The dynamic process of passes' outlet temperatures with flve fuel controllers
-
[1] Wang X X, Zheng D Z. Difference control of parallel streams temperatures. Journal of Process Control, 2005, 15(5): 531-536 doi: 10.1016/j.jprocont.2004.11.002 [2] 李嗣福, 吴福明, 陈红, 陈忠保, 卿致远.炼油加热炉进料支管出口温度平衡控制.信息与控制, 1994, 23(4): 243-246 http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK404.009.htmLi Si-Fu, Wu Fu-Ming, Chen Hong, Chen Zhong-Bao, Qin Zhi-Yuan. Refinery furnace feed-branches outlet temperatures balancing control. Information and Control, 1994, 23(4): 243-246 http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK404.009.htm [3] Wang X X, Zheng D Z. Generalized difference control of parallel streams temperatures. Journal of Process Control, 2006, 16(5): 535-543 doi: 10.1016/j.jprocont.2005.07.006 [4] Wang X X, Zheng D Z. Load balancing control of furnace with multiple parallel passes. Control Engineering Practice, 2007, 15(5): 521-531 doi: 10.1016/j.conengprac.2006.10.002 [5] 吴洁芸, 雷卫良, 周娓, 程高峰.平均值法在加热炉支路平衡控制上的实现.化工自动化及仪表, 2014, 41(10): 1189-1191 doi: 10.3969/j.issn.1000-3932.2014.10.022Wu Jie-Yun, Lei Wei-Liang, Zhou Wei, Cheng Gao-Feng. Averaging method to implement balance control of heating furnace branches. Control and Instruments in Chemical Industry, 2014, 41(10): 1189-1191 doi: 10.3969/j.issn.1000-3932.2014.10.022 [6] 牟金善, 王昕, 王振雷, 钱锋.乙烯裂解炉炉管出口温度控制系统设计及应用.计算机与应用化学, 2012, 29(1): 90-94 http://www.cnki.com.cn/Article/CJFDTOTAL-JSYH201201021.htmMu Jin-Shan, Wang Xin, Wang Zhen-Lei, Qian Feng. Design and application of COT control system of ethylene cracking furnace. Computers and Applied Chemistry, 2012, 29(1): 90-94 http://www.cnki.com.cn/Article/CJFDTOTAL-JSYH201201021.htm [7] Abilov A G, Zeybek Z, Tuzunalp O, Telatar Z. Fuzzy temperature control of industrial refineries furnaces through combined feedforward/feedback multivariable cascade systems. Chemical Engineering and Processing: Process Intensification, 2002, 41(1): 87-98 doi: 10.1016/S0255-2701(01)00119-2 [8] 严爱军, 柴天佑, 岳恒.竖炉焙烧过程的多变量智能优化控制.自动化学报, 2006, 32(4): 636-640 http://www.aas.net.cn/CN/abstract/abstract14401.shtmlYan Ai-Jun, Chai Tian-You, Yue Heng. Multivariable intelligent optimizing control approach for shaft furnace roasting process. Acta Automatica Sinica, 2006, 32(4): 636-640 http://www.aas.net.cn/CN/abstract/abstract14401.shtml [9] 韩志刚, 汪国强.无模型控制律串级形式及其应用.自动化学报, 2006, 32(3): 345-352 http://www.aas.net.cn/CN/abstract/abstract15819.shtmlHan Zhi-Gang, Wang Guo-Qiang. Cascade scheme of model free control law and its application. Acta Automatica Sinica, 2006, 32(3): 345-352 http://www.aas.net.cn/CN/abstract/abstract15819.shtml [10] 李平, 李奇安, 雷荣孝, 陈爱军, 任丽丽, 曹巍.乙烯裂解炉先进控制系统开发与应用.化工学报, 2011, 62(8): 2216-2220 http://www.cnki.com.cn/Article/CJFDTOTAL-ZDHJ201410005.htmLi Ping, Li Qi-An, Lei Rong-Xiao, Chen Ai-Jun, Ren Li-Li, Cao Wei. Development and application of advanced process control system for ethylene cracking heaters. CIESC Journal, 2011, 62(8): 2216-2220 http://www.cnki.com.cn/Article/CJFDTOTAL-ZDHJ201410005.htm [11] Shi H Y, Su C L, Cao J T, Li P, Liang J P, Zhong G C. Nonlinear adaptive predictive functional control based on the Takagi-Sugeno model for average cracking outlet temperature of the ethylene cracking furnace. Industrial & Engineering Chemistry Research, 2015, 54(6): 1849-1860 doi: 10.1021/ie503531z?src=recsys [12] Leva A. Autotuning process controller with improved load disturbance rejection. Journal of Process Control, 2005, 15(2): 223-234 doi: 10.1016/j.jprocont.2004.05.002 [13] Wang X X. Temperature uniformity control of a furnace system with multiple parallel passes using fuzzy difference control technique. In: Proceedings of the 7th World Congress on Intelligent Control and Automation. Chongqing, China: IEEE, 2008. 794-799 [14] 李世原, 黄鑫.基于广义预测控制的常压加热炉先进控制技术应用研究.计算机与应用化学, 2013, 30(8): 864-866 http://www.cnki.com.cn/Article/CJFDTOTAL-JSYH201308010.htmLi Shi-Yuan, Huang Xin. A generalized predictive control-based application research of advanced process control for atmospheric furnace. Computers and Applied Chemistry, 2013, 30(8): 864-866 http://www.cnki.com.cn/Article/CJFDTOTAL-JSYH201308010.htm [15] 毕春长, 李柠, 黄道.蓄热式加热炉钢温预报与炉温优化设定研究.自动化学报, 2004, 30(3): 476-480 http://www.aas.net.cn/CN/abstract/abstract16197.shtmlBi Chun-Chang, Li Ning, Huang Dao. Study on billet temperature prediction and furnace temperature optimal setting of regenerative reheating furnace. Acta Automatica Sinica, 2004, 30(3): 476-480 http://www.aas.net.cn/CN/abstract/abstract16197.shtml [16] 陈友文, 柴天佑.加热炉作业计划优化方法的研究与应用.控制与决策, 2011, 26(2): 297-302 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201102027.htmChen You-Wen, Chai Tian-You. The research and application on the optimization method for campaign planning of heating furnace. Control and Decision, 2011, 26(2): 297-302 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201102027.htm [17] 亓鲁刚, 吕文祥, 高小永, 栾志业, 黄德先.多液位与加热炉复合系统的协调控制.化工学报, 2016, 67(3): 690-694 http://www.cnki.com.cn/Article/CJFDTOTAL-HGSZ201603002.htmQi Lu-Gang, Lv Wen-Xiang, Gao Xiao-Yong, Luan Zhi-Ye, Huang De-Xian. Coordinated control of multiple liquid levels and furnace composite system. CIESC Journal, 2016, 67(3): 690-694 http://www.cnki.com.cn/Article/CJFDTOTAL-HGSZ201603002.htm [18] Ojasvi, Kumar A, Kaistha N. Control system design for furnaces with multiple parallel passes. Industrial & Engineering Chemistry Research, 2016, 55(19): 5702-5713 http://www.sciencedirect.com/science/article/pii/S2405896316304815 [19] 闵鸯, 栾小丽, 刘飞.基于分布式偏差的加热炉支路温度一致控制.化工学报, 2016, 67(12): 5148-5154 http://www.cnki.com.cn/Article/CJFDTOTAL-HGSZ201612028.htmMin Yang, Luan Xiao-Li, Liu Fei. Uniform temperature control on feed heaters by distributed deviations. CIESC Journal, 2016, 67(12): 5148-5154 http://www.cnki.com.cn/Article/CJFDTOTAL-HGSZ201612028.htm -

 下载:
下载:


图(7)
计量
- 文章访问数: 2206
- HTML全文浏览量: 328
- PDF下载量: 737
- 被引次数: 0
