

-
摘要: 针对细颗粒物PM2.5的浓度预测,本文提出了基于单时间序列数据的动态调整模型.在动态指数平滑算法中,指数平滑次数与参数基于样本数据并借助二分查找进行调整.在动态马尔科夫模型中,马尔科夫链的残差状态数、隐马尔科夫模型的隐状态数、连续样本数和阈值参数都通过训练数据加以调整.动态调整模型将指数平滑法和马尔科夫模型有效结合起来,指数平滑法得到的预测值由马尔科夫模型进行校正,从而提高预测准确度.基于大量实际PM2.5数据进行测试,验证了算法的有效性.并与其他现有的灰色模型、人工神经网络、自回归滑动平均模型、支持向量机等方法进行了对比,表明所提模型能够得到精度更高的预测结果.本文模型不局限于PM2.5数据,还可应用于其他类型的数据预测.Abstract: A prediction model is proposed with dynamic adjustment for single time series of PM2.5 data. In the dynamic exponential smoothing algorithm, the optimal exponent and parameter are determined by sample data and binary search. In the dynamic Markov model, the state number of residual errors from Markov chain, numbers of hidden and observable states, and threshold parameters from hidden Markov model, are all decided dynamically based on training data. The proposed dynamic model combines the two models effectively, and predictions from exponential smoothing are adjusted by Markov model to increase the accuracy. Using a large number of real PM2.5 data, efficiency of the proposed model has been tested. Compared with the existing popular methods, such as gray model, artificial neural networks, auto-regressive moving average, support vector machine, the proposed model can obtain prediction results with the best precision. In addition to PM2.5, the dynamically adjusted prediction model may be used for prediction of other type single time series of data.
-
Key words:
- Air quality index /
- exponential smoothing /
- Markov model /
- dynamic adjustment
1) 本文责任编委 郭戈 -
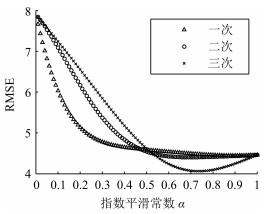
图 1 序列$X_1$指数平滑不同$\alpha$值的预测误差
Fig. 1 ES prediction errors with different $\alpha$ values for sequence $X_1$
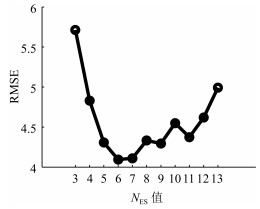
图 2 不同$N_{\rm ES}$值的序列$X_4$指数平滑法预测误差
Fig. 2 ES prediction errors with different $N_{\rm ES}$ values for sequence $X_4$
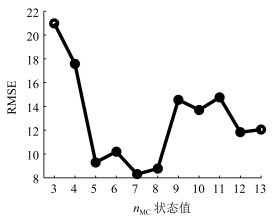
图 4 不同$n_{\rm MC}$值的序列$X_2$马尔科夫链预测误差
Fig. 4 MC prediction errors with different $n_{\rm MC}$ values for sequence $X_2$

图 6 不同$I_t$值和$C_t$值的序列$X_3$预测误差
Fig. 6 Prediction errors of different $I_t$ and $C_t$ values for sequence $X_3$

图 7 指数平滑法和马尔科夫模型组合的预测算法
Fig. 7 The combined prediction algorithm from exponential smoothing and Markov model
图 8 若干城市${\rm PM}2.5$监测点分布示意图
Fig. 8 Distribution of ${\rm PM}2.5$ stations in several cities
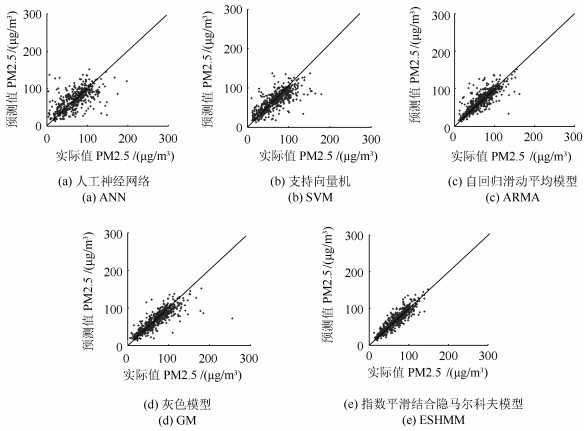
图 9 预测值与实际值的${\rm PM}2.5$散点图
Fig. 9 Scatter plot of predicted versus observed ${\rm PM}2.5$

图 10 基于5种算法的武汉、北京、天津、郑州${\rm PM}2.5$预测误差
Fig. 10 Prediction errors of ${\rm PM}2.5$ in Wuhan, Beijing, Tianjin, and Zhengzhou from 5 algorithms
表 1 二分查找得到的$X_1$序列最优$\alpha$与RMSE
Table 1 The optimal parameter $\alpha$ and related RMSE from binary search for sequence $X_1$
指数平滑法 最小RMSE 最优α 一次 4.4455 0.9050 二次 4.4040 0.6900 三次 4.0641 0.7350  下载: 导出CSV
下载: 导出CSV
表 2 三种指数平滑法对5组序列数据的预测效果
Table 2 Performances of 3 ES methods for 5 sequences
序列 一次 二次 三次 最优 X1 4.4455 4.4040 4.0641 三次 X2 8.5289 9.4706 9.1253 一次 X3 11.7953 11.2577 11.7502 二次 X4 5.6960 4.7106 4.1102 三次 X5 36.2899 36.2919 34.4010 三次
下载: 导出CSV
表 3 基于5组序列数据的马尔科夫链$n_{\rm MC}$最优值
Table 3 The optimal $n_{\rm MC}$ values of MC for 5 sequences
序列 最小RMSE 最优nMc X1 7.2398 7 X2 8.2994 7 X3 8.2055 7 X4 2.4731 7 X5 20.4794 7
下载: 导出CSV
表 4 隐马尔科夫模型预测的5组序列数据的最优$C_t$和$I_t$值
Table 4 The optimal $C_t$ and $I_t$ values of HMM prediction for 5 sequences
序列 Ct It RMSE X1 0.13 0.93 4.4000 X2 0.26 0.91 19.9012 X3 0.13 0.82 20.9012 X4 0.13 1.00 6.0537 X5 0.26 0.75 28.7373
下载: 导出CSV
表 5 三种隐马尔科夫模型对5组数据的预测效果
Table 5 Performances of 3 kinds of HMM methods for 5 sequences
序列 3H3S9O 3H4S27O 4H3S16O 最优算法 X1 3.9309 3.8443 5.5246 3H4S27O X2 8.2849 26.8030 27.2460 3H3S9O X3 17.0960 17.4780 21.7550 3H3S9O X4 5.6534 7.5703 8.8407 3H3S9O X5 42.5348 43.9865 54.6437 3H3S9O
下载: 导出CSV
表 6 针对100组序列数据的平均评估值
Table 6 Averaged evaluation criteria of 100 sequences
序列 ES MC HMM ESMC ESHMM 平均RMSE 12.6745 17.0434 12.4850 17.8595 10.1843 平均AME 10.3838 13.1197 9.9381 14.0072 8.8336 平均PAEE 3.2151 5.6512 3.4993 6.6281 2.5090
下载: 导出CSV
表 7 与现有4种算法的预测误差比较
Table 7 The comparison of prediction errors with 4 existing algorithms
序列 ANN SVM ARMA GM ESHMM 平均RMSE 23.7594 18.4532 15.7469 13.9438 10.1843 平均AME 17.7772 14.3728 10.3086 10.9673 8.8336 平均PAEE 5.6802 3.7900 4.0373 3.8927 2.5090
下载: 导出CSV
-
[1] Chan Y, Xia L, Ren Y, Chen Y T. Multi-scale modelling on PM2.5 encapsulation inside doubly-layered graphene. IET Micro and Nano Letters, 2015, 10(12):696-699 doi: 10.1049/mnl.2015.0218 [2] Zhan H L, Li Q, Zhao K, Zhang L W, Zhang Z W, Zhang C L, Xiao L Z. Evaluating PM2.5 at a construction site using terahertz radiation. IEEE Transactions on Terahertz Science and Technology, 2015, 5(6):1028-1034 doi: 10.1109/TTHZ.2015.2477596 [3] Rajasegarar S, Havens T C, Karunasekera S, Leckie C, Bezdek J C, Jamriska M, Gunatilaka A, Skvortsov A, Palaniswami M. High-resolution monitoring of atmospheric pollutants using a system of low-cost sensors. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(7):3823-3832 doi: 10.1109/TGRS.2013.2276431 [4] Shaban K B, Kadri A, Rezk E. Urban air pollution monitoring system with forecasting models. IEEE Sensors Journal, 2016, 16(8):2598-2606 doi: 10.1109/JSEN.2016.2514378 [5] Díaz-Robles L, Ortega J C, Fu J S, Reed G D, Chow J C, Watson J G, Moncada-Herrera J A. A hybrid ARIMA and artificial neural networks model to forecast particulate matter in urban areas:the case of Temuco, Chile. Atmospheric Environment, 2008, 42(35):8331-8340 doi: 10.1016/j.atmosenv.2008.07.020 [6] Stadlober E, Hörmann S, Pfeiler B. Quality and performance of a PM10 daily forecasting model. Atmospheric Environment, 2008, 42(6):1098-1109 doi: 10.1016/j.atmosenv.2007.10.073 [7] Macaira P M, Sousa R C, Oliveira F L C. Forecasting brazil's electricity consumption with pegels exponential smoothing techniques. IEEE Latin America Transactions, 2016, 14(3):1252-1258 doi: 10.1109/TLA.2016.7459606 [8] Taylor J W, Roberts M B. Forecasting frequency-corrected electricity demand to support frequency control. IEEE Transactions on Power Systems, 2016, 31(3):1925-1932 doi: 10.1109/TPWRS.2015.2444665 [9] Jamal W, Das S, Oprescu I A, Maharatna K. Prediction of synchrostate transitions in EEG signals using Markov chain models. IEEE Signal Processing Letters, 2015, 22(2):149-152 doi: 10.1109/LSP.2014.2352251 [10] Lawlor S, Rabbat M G. Time-varying mixtures of Markov chains:an application to road traffic modeling. IEEE Transactions on Signal Processing, 2017, 65(12):3152-3167 doi: 10.1109/TSP.2017.2684747 [11] Razin Y S, Pluckter K, Ueda J, Feigh K. Predicting task intent from surface electromyography using layered hidden Markov models. IEEE Robotics and Automation Letters, 2017, 2(2):1180-1185 doi: 10.1109/LRA.2017.2662741 [12] Soualhi A, Clerc G, Razik H, El Badaoui M, Guillet F. Hidden Markov models for the prediction of impending faults. IEEE Transactions on Industrial Electronics, 2016, 63(5):3271-3281 doi: 10.1109/TIE.2016.2535111 [13] Samet H, Mojallal A. Enhancement of electric arc furnace reactive power compensation using Grey-Markov prediction method. IET Generation, Transmission and Distribution, 2014, 8(9):1626-1636 doi: 10.1049/iet-gtd.2013.0698 [14] Chen L, Tian B B, Lin W L, Ji B, Li J Z, Pan H H. Analysis and prediction of the discharge characteristics of the lithium-ion battery based on the Grey system theory. IET Power Electronics, 2015, 8(12):2361-2369 doi: 10.1049/iet-pel.2015.0182 [15] de Lima G R T, Stephany S, de Paula E R, Batista I S, Abdu M A. Prediction of the level of ionospheric scintillation at equatorial latitudes in Brazil using a neural network. Space Weather, 2015, 13(8):446-457 doi: 10.1002/2015SW001182 [16] Nagulan S, Selvaraj J, Arunachalam A, Sivanandam K. Performance of artificial neural network in prediction of heave displacement for non-buoyant type wave energy converter. IET Renewable Power Generation, 2017, 11(1):81-84 doi: 10.1049/iet-rpg.2015.0416 [17] Moshkbar-Bakhshayesh K, Ghofrani M B. Development of a robust identifier for NPPs transients combining ARIMA model and EBP algorithm. IEEE Transactions on Nuclear Science, 2014, 61(4):2383-2391 doi: 10.1109/TNS.2014.2329055 [18] Wei M, Kim K. Intrusion detection scheme using traffic prediction for wireless industrial networks. Journal of Communications and Networks, 2012, 14(3):310-318 doi: 10.1109/JCN.2012.6253092 [19] 吴奇, 严洪森, 王斌.基于鲁棒小波ν——支持向量机的产品销售预测模型.自动化学报, 2009, 35(7):1227-1232 http://www.aas.net.cn/CN/abstract/abstract13511.shtmlWu Qi, Yan Hong-Sen, Wang Bin. Product sales forecasting model based on robust wavelet ν-support vector machine. Acta Automatica Sinica, 2009, 35(7):1227-1232 http://www.aas.net.cn/CN/abstract/abstract13511.shtml [20] Liu Y Q, Sun Y, Infield D, Zhao Y, Han S, Yan J. A hybrid forecasting method for wind power ramp based on orthogonal test and support vector machine (OT-SVM). IEEE Transactions on Sustainable Energy, 2017, 8(2):451-457 doi: 10.1109/TSTE.2016.2604852 [21] Gupta S, Kambli R, Wagh S, Kazi F. Support-vector-machine-based proactive cascade prediction in smart grid using probabilistic framework. IEEE Transactions on Industrial Electronics, 2015, 62(4):2478-2486 doi: 10.1109/TIE.2014.2361493 -

 下载:
下载:


计量
- 文章访问数: 2558
- HTML全文浏览量: 562
- PDF下载量: 604
- 被引次数: 0
