

CRLB for the Event Triggered Area Target Tracking System With Intermittent Observations
-
摘要: 面目标跟踪系统状态估计问题中,附加的强非线性面目标扩展测量会增加系统的通信量和估计中心的计算量.为此,基于工程应用,提出一种不完全量测下的事件触发机制来控制面目标测量传输.从理论上推导了事件触发机制下面目标跟踪系统的理想(枚举)克拉美罗下界(Cramer-Rao lower bound,CRLB)和统计意义下的CRLB,该统计意义CRLB为理想CRLB的下界,计算复杂度远小于理想CRLB,便于工程应用.典型测试航路下的仿真结果表明:不完全量测下,面目标跟踪系统CRLB明显小于传统质点目标跟踪系统CRLB;同时,利用所提事件触发机制,可在大幅减少面目标跟踪系统通信量的同时保证系统的最优估计性能.
-
关键词:
- 不完全量测 /
- 面目标 /
- 事件触发机制 /
- Cramer-Rao下界
Abstract: In area target tracking systems, communication cost and computational burden are increased by additional nonlinear extended area target measurements. Hence, based on practical engineering, an event triggered transmission mechanism with intermittent observations is proposed. We theoretically derive the ideal (enumeration) Cramer-Rao lower bound (CRLB) and the statistical CRLB of the event triggered area target tracking system. The proposed statistical CRLB, which can be readily implemented in practical applications, is a lower bound of the ideal CRLB. Finally, simulation experiments in typical test routes demonstrate that, with intermittent observations, the CRLB of the area target tracking system is significantly smaller than that of the traditional particle target tracking system. Moreover, by using the proposed event triggered transmission mechanism, the communication cost can be significantly reduced while the optimal estimation performance is slightly affected.1) 本文责任编委 潘泉 -
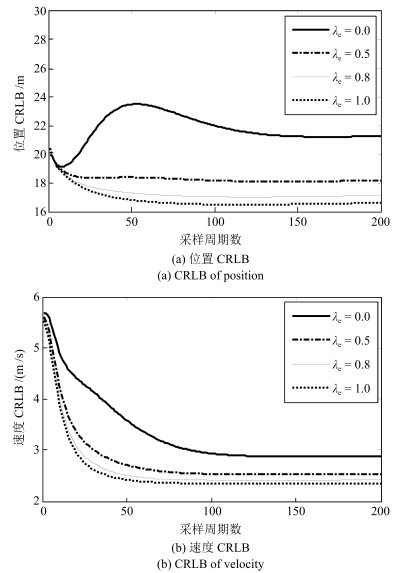
图 2 CRLB与面目标扩展测量通道探测概率$\lambda_{{\rm{e}}}$的关系
Fig. 2 The relationship between the CRLB and the detection probability $\lambda_{{\rm{e}}}$ of extended area target measurements
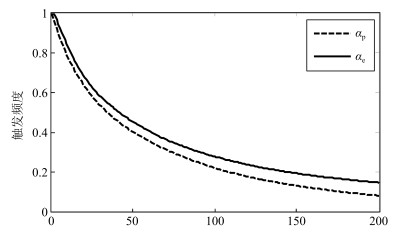
图 3 双探测通道触发频度$\alpha_i$ $(i={\rm p}, {\rm e})$与触发阈值$\delta$的关系
Fig. 3 The relationship between the triggered frequency $\alpha_i$ $(i={\rm p}, {\rm e})$ and the triggered threshold $\delta$
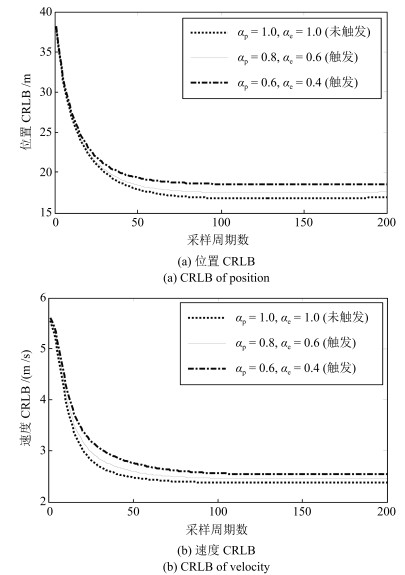
图 4 不同触发频度下面目标跟踪系统CRLB
Fig. 4 The CRLB of the area target tracking system with different triggered frequencies
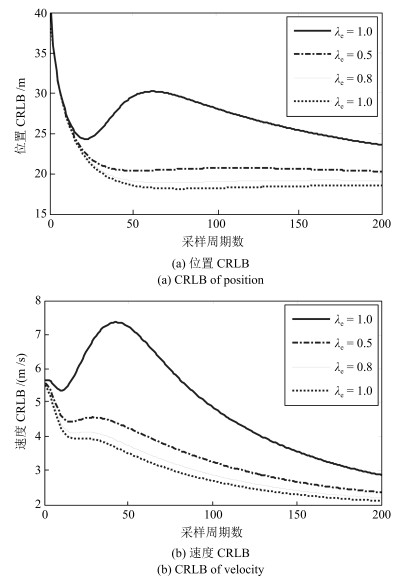
图 5 CRLB与面目标扩展测量通道探测概率$\lambda_{{\rm{e}}}$的关系
Fig. 5 The relationship between the CRLB and the detection probability $\lambda_{{\rm{e}}}$ of extended area target measurements
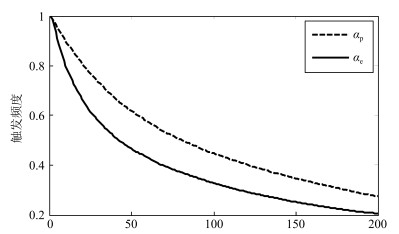
图 6 双探测通道触发频度$\alpha_i$ $(i={\rm p}, {\rm e})$与触发阈值$\delta$的关系
Fig. 6 The relationship between the triggered frequency $\alpha_i$ $(i={\rm p}, {\rm e})$ and the triggered threshold $\delta$
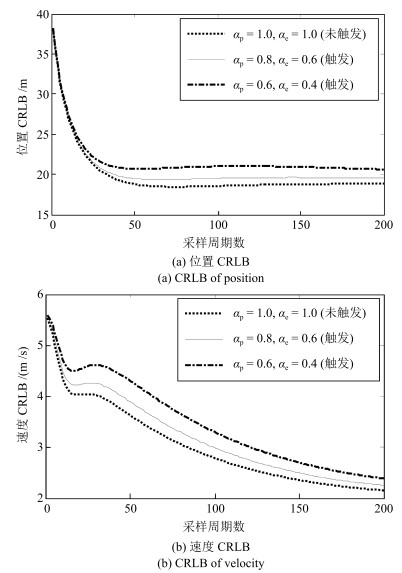
图 7 不同触发频度下面目标跟踪系统CRLB
Fig. 7 The CRLB of the area target tracking system with different triggered frequencies
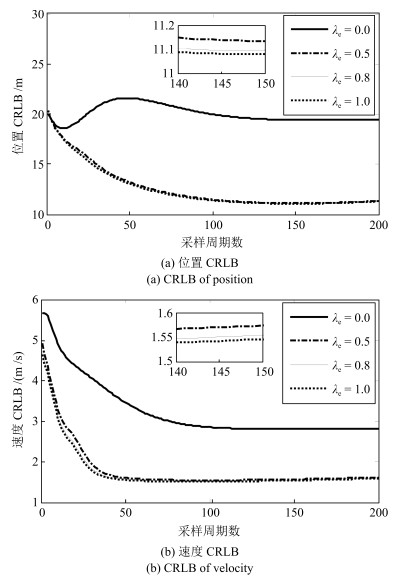
图 8 CRLB与面目标扩展测量通道探测概率$\lambda_{{\rm{e}}}$的关系
Fig. 8 The relationship between the CRLB and the detection probability $\lambda_{{\rm{e}}}$ of extended area target measurements
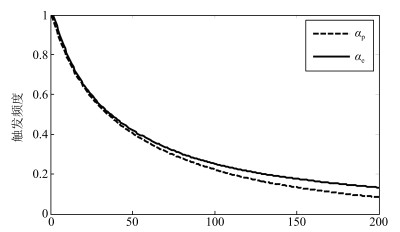
图 9 双探测通道触发频度$\alpha_i$ $(i={\rm p}, {\rm e})$与触发阈值$\delta$的关系
Fig. 9 The relationship between the triggered frequency $\alpha_i$ $(i={\rm p}, {\rm e})$ and the triggered threshold $\delta$
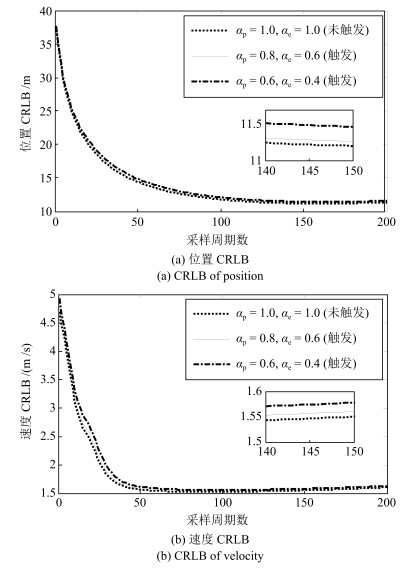
图 10 不同触发频度下面目标跟踪系统CRLB
Fig. 10 The CRLB of the area target tracking system with different triggered frequencies
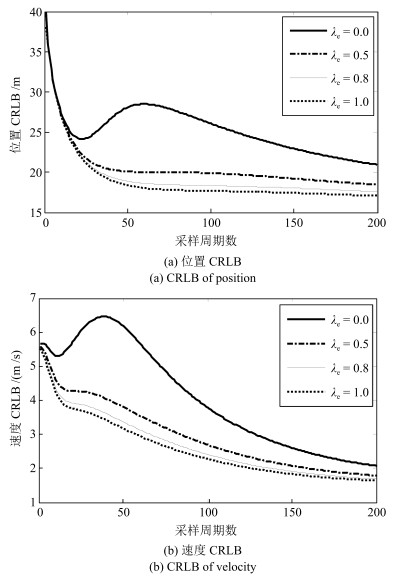
图 11 CRLB与面目标扩展测量通道探测概率$\lambda_{{\rm{e}}}$的关系
Fig. 11 The relationship between the CRLB and the detection probability $\lambda_{{\rm{e}}}$ of extended area target measurements
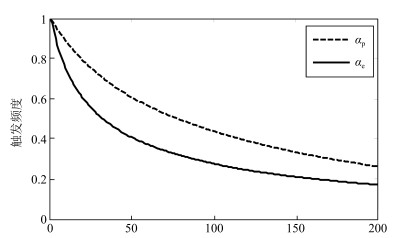
图 12 双探测通道触发频度$\alpha_i(i={\rm p}, {\rm e})$与触发阈值$\delta$的关系
Fig. 12 The relationship between the triggered frequency $\alpha_i(i={\rm p}, {\rm e})$ and the triggered threshold $\delta$

图 13 不同触发频度下面目标跟踪系统CRLB
Fig. 13 The CRLB of the area target tracking system with different triggered frequencies
表 1 面目标跟踪系统测量信息核心数据发送协议
Table 1 The core data transmission protocol of the area target tracking system
数据 距离 方位角 顺向距离 横向距离 字长 2字节 2字节 2字节 2字节  下载: 导出CSV
下载: 导出CSV
表 2 不同触发频度下基于事件触发机制的面目标跟踪系统平均CRLB
Table 2 Comparison of average CRLBs of the event triggered area target tracking system with different triggered probabilities
平均$\mathrm{CRLB}$ $\alpha_{{\rm{p}}}=1.0$ $\alpha_{{\rm{p}}}=0.8$ $\alpha_{{\rm{p}}}=0.6$ $\alpha_{{\rm{e}}}=1.0$ $\alpha_{{\rm{e}}}=0.6$ $\alpha_{{\rm{e}}}=0.4$ 位置/$\mathrm{(m)}~({\rm{CV}})$ 18.38 18.92 19.84 速度/$\mathrm{(m/s)}~({\rm{CV}})$ 2.59 2.68 2.80 位置/$\mathrm{(m)}~({\rm{CA}})$ 19.78 20.51 21.71 速度/$\mathrm{(m/s)}~({\rm{CA}})$ 3.02 3.21 3.48 位置/$\mathrm{(m)}~(\mathrm{CT})$ 13.94 14.03 14.31 速度/$\mathrm{(m/s)}~(\mathrm{CT})$ 1.75 1.78 1.81 位置/$\mathrm{(m)}~(\mathrm{Singer})$ 19.17 19.71 20.72 速度/$\mathrm{(m/s)}~(\mathrm{Singer})$ 2.62 2.74 2.94
下载: 导出CSV
表 3 不同探测概率下基于事件触发机制的面目标跟踪系统平均CRLB
Table 3 Comparison of average CRLBs of the event triggered area target tracking system with different detection probabilities
平均$\mathrm{CRLB}$ $\lambda_{{\rm{p}}}=0.6$ $\lambda_{{\rm{p}}}=0.7$ $\lambda_{{\rm{p}}}=0.8$ $\lambda_{{\rm{e}}}=0.7$ $\lambda_{{\rm{e}}}=0.8$ $\lambda_{{\rm{e}}}=0.9$ 位置/$\mathrm{(m)}~({\rm{CV}})$ 22.12 20.87 19.81 速度/$\mathrm{(m/s)}~({\rm{CV}})$ 2.88 2.81 2.75 位置/$\mathrm{(m)}~({\rm{CA}})$ 24.07 22.59 21.39 速度/$\mathrm{(m/s)}~({\rm{CA}})$ 3.63 3.47 3.35 位置/$\mathrm{(m)}~(\mathrm{CT})$ 16.02 15.21 14.54 速度/$\mathrm{(m/s)}~(\mathrm{CT})$ 1.86 1.83 1.80 位置/$\mathrm{(m)}~(\mathrm{Singer})$ 22.53 21.24 20.17 速度/$\mathrm{(m/s)}~(\mathrm{Singer})$ 2.92 2.81 2.72
下载: 导出CSV
-
[1] Bar-Shalom Y, Li X R, Kirubarajan T. Estimation with Applications to Tracking and Navigation. New York:Wiley, 2001. [2] Zhong Z W, Meng H D, Wang X Q. Extended target tracking using an IMM based Rao-Blackwellised unscented Kalman filter. In:Proceedings of the 9th International Conference on Signal Processing. Beijing, China:IEEE, 2008. 2409-2412 [3] Angelova D, Mihaylova L. Extended object tracking using Monte Carlo methods. IEEE Transactions on Signal Processing, 2008, 56 (2):825-832 doi: 10.1109/TSP.2007.907851 [4] Xu J H, Zhou Y C, Jing Y W. Extended target tracking for high resolution sensor based ensemble Kalman filters. In:Proceedings of the 2010 Chinese Control and Decision Conference. Xuzhou, China:IEEE, 2010. 3308-3313 [5] Meng H D, Zhong Z W, Wang X Q. Performance bounds of extended target tracking in cluttered environments. Science China Information Sciences, 2013, 56 (7):1-12 http://dblp.uni-trier.de/db/journals/chinaf/chinaf56.html#MengZW13 [6] Shi J, Li Y Y, Qi G Q, Sheng A D. Extended target tracking filter with intermittent observations. IET Signal Processing, 2016, 10 (6):592-602 doi: 10.1049/iet-spr.2015.0389 [7] 陈烨, 李银伢, 戚国庆, 盛安冬.多通道解耦事件触发机制及其在光电传感网络中的应用.自动化学报, 2017, 43 (2):227-237 http://www.aas.net.cn/CN/abstract/abstract19001.shtmlChen Ye, Li Yin-Ya, Qi Guo-Qing, Sheng An-Dong. A multi-channel decoupled event triggered transmission mechanism and its application to optic-electric sensor network. Acta Automatica Sinica, 2017, 43 (2):227-237 http://www.aas.net.cn/CN/abstract/abstract19001.shtml [8] 薛东国, 陈博, 张文安, 俞立.通信受限下网络化多传感器系统的Kalman融合估计.自动化学报, 2015, 41 (1):203-208 http://www.aas.net.cn/CN/abstract/abstract18599.shtmlXue Dong-Guo, Chen Bo, Zhang Wen-An, Yu Li. Kalman fusion estimation for networked multi-sensor fusion systems with communication constraints. Acta Automatica Sinica, 2015, 41 (1):203-208 http://www.aas.net.cn/CN/abstract/abstract18599.shtml [9] Battistelli G, Benavoli A, Chisci L. Data-driven communication for state estimation with sensor networks. Automatica, 2012, 48 (5):926-935 doi: 10.1016/j.automatica.2012.02.028 [10] You K Y, Xie L H. Kalman filtering with scheduled measurements. IEEE Transactions on Signal Processing, 2013, 61 (6):1520-1530 doi: 10.1109/TSP.2012.2235436 [11] Shi D W, Chen T W, Shi L. Event-based state estimation of linear dynamical systems:communication rate analysis. In:Proceedings of the 2014 American Control Conference. Portland, USA:IEEE, 2014. 4665-4670 [12] 赵国荣, 韩旭, 卢建华.一种基于数据驱动传输策略的带宽受限的分布式融合估计器.自动化学报, 2015, 41 (9):1649-1658 http://www.aas.net.cn/CN/abstract/abstract18738.shtmlZhao Guo-Rong, Han Xu, Lu Jian-Hua. A decentralized fusion estimator using data-driven communication strategy subject to bandwidth constraints. Acta Automatica Sinica, 2015, 41 (9):1649-1658 http://www.aas.net.cn/CN/abstract/abstract18738.shtml [13] Trimpe S, Campi M C. On the choice of the event trigger in event-based estimation. In:Proceedings of the 2015 International Conference on Event-Based Control, Communication, and Signal Processing. Krakow, Poland:IEEE, 2015. 1-8 [14] Yu M, Yan C, Xie D M, Xie G M. Event-triggered tracking consensus with packet losses and time-varying delays. IEEE/CAA Journal of Automatica Sinica, 2016, 3 (2):165-173 doi: 10.1109/JAS.2016.7451104 [15] Jia P, Hao F, Yu H. Function observer based event-triggered control for linear systems with guaranteed L∞-gain. IEEE/CAA Journal of Automatica Sinica, 2015, 2 (4):394-402 doi: 10.1109/JAS.2015.7296534 [16] Liu X D, Li L Y, Li Z, Fernando T, Iu H H C. Stochastic stability condition for the extended Kalman filter with intermittent observations. IEEE Transactions on Circuits and Systems Ⅱ:Express Briefs, 2017, 64 (3):334-338 doi: 10.1109/TCSII.2016.2578956 [17] 石杰, 李银伢, 戚国庆, 盛安冬.不完全量测下基于机器视觉的被动跟踪算法.华中科技大学学报(自然科学版), 2017, 45 (6):33-37 http://d.old.wanfangdata.com.cn/Periodical/hzlgdxxb201706007Shi Jie, Li Yin-Ya, Qi Guo-Qing, Sheng An-Dong. Machine vision based passive tracking algorithm with intermittent observations. Journal of Huazhong University of Science and Technology (Nature Science Edition), 2017, 45 (6):33-37 http://d.old.wanfangdata.com.cn/Periodical/hzlgdxxb201706007 [18] Zhao Y B, Fan X P, Xu C Z, Li X F. ER-CRLB:an extended recursive Cramér-Rao lower bound fundamental analysis method for indoor localization systems. IEEE Transactions on Vehicular Technology, 2017, 66 (2):1605-1618 doi: 10.1109/TVT.2016.2553682 [19] Boers Y, Driessen H. A note on bounds for target tracking with pd < 1. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45 (2):640-646 doi: 10.1109/TAES.2009.5089546 [20] Zhong Z W, Meng H D, Wang X Q. A comparison of posterior Cramer-Rao bounds for point and extended target tracking. IEEE Signal Processing Letters, 2010, 17 (10):819-822 doi: 10.1109/LSP.2010.2059699 [21] Anastasio V, Farina A, Colone F, Lombardo P. Cramér-Rao lower bound with pd < 1 for target localisation accuracy in multistatic passive radar. IET Radar, Sonar, and Navigation, 2014, 8 (7):767-775 doi: 10.1049/iet-rsn.2013.0213 [22] Horn R A, Johnson C R. Matrix Analysis. Cambridge:Cambridge University Press, 2012. http://d.old.wanfangdata.com.cn/Periodical/xyjsclygc2009z3013 [23] Hernandez M, Ristic B, Farina A, Timmoneri L. A comparison of two Cramér-Rao bounds for nonlinear filtering with pd < 1. IEEE Transactions on Signal Processing, 2004, 52 (9):2361-2370 doi: 10.1109/TSP.2004.831906 -

 下载:
下载:

计量
- 文章访问数: 2874
- HTML全文浏览量: 332
- PDF下载量: 640
- 被引次数: 0
