

-
摘要: 噪声估计在视频去噪领域具有重要的研究意义.实际生活中的噪声都是未知的,然而现存的视频去噪算法通常都假定视频的噪声水平是已知的,本文提出一种基于主成分分析(Principal component analysis,PCA)的分块视频噪声估计算法.首先,基于帧间进行块匹配寻找相似块,得到差分图像以消除视频运动的影响;其次,将正态分布函数作为阈值函数简化噪声估计算法模型;最后,设置明确迭代指标使得估计的结果更加精确,且降低了计算复杂度.主观视觉效果和客观指标对比表明,本文提出的基于主成分分析的分块视频噪声估计算法比其他优秀的噪声估计算法误差小同时鲁棒性高,能准确地估计视频噪声.Abstract: Noise estimation is an important issue in video denoising applications. However, in practice the noise level is unknown in most cases, but most existing denoising algorithms simply assume the noise level is known beforehand. In this paper, we propose a block-based video noise estimation algorithm via the principal component analysis (PCA). Firstly, similar blocks are searched by block matching between frames, and the difference image is obtained to eliminate the influence of video motion. Secondly, a thresholding function of normal distribution is used to simplify the model of noise estimation. Finally, setting clear iterative metrics makes the estimation results more accurate and reduces the computational complexity. Subjective and objective comparisons show that, compared with other state-of-art algorithms, the noise estimation of the proposed video denoising algorithm is robust against small errors and achieves outstanding denoising effect.1) 本文责任编委 桑农
-
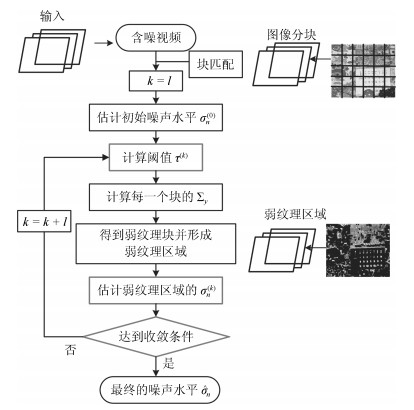
图 4 本文算法迭代噪声水平估计流程图
Fig. 4 Flowchart of the iterative noise level estimation for proposed algorithm
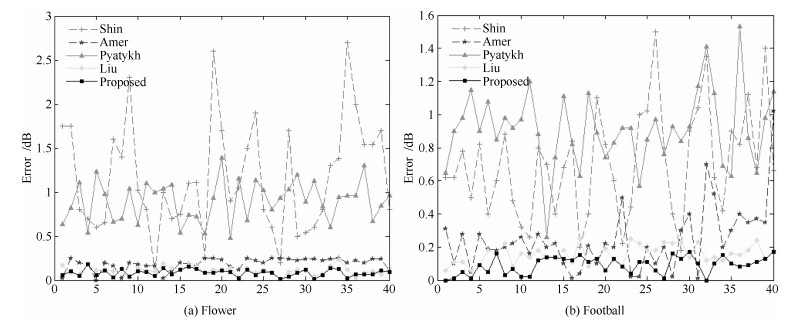
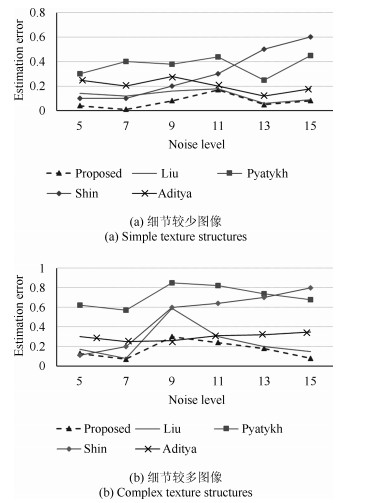
图 5 加噪20 dB视频序列(Flower, Football)估计误差
Fig. 5 Noise estimation error for 20 dB noisy sequences (Flower, Football)
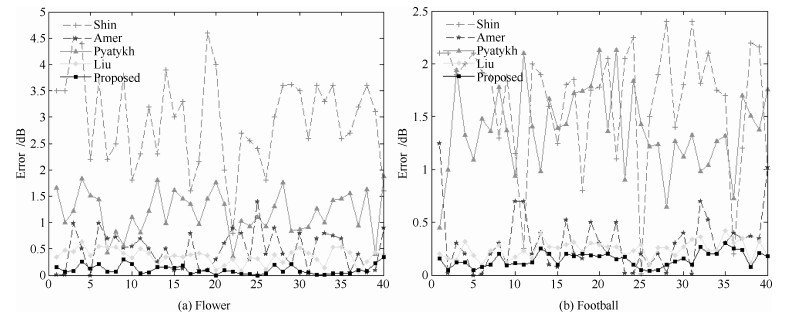
图 6 加噪30 dB视频序列(Flower, Football)估计误差
Fig. 6 Noise estimation error for 30 dB noisy sequences (Flower, Football)
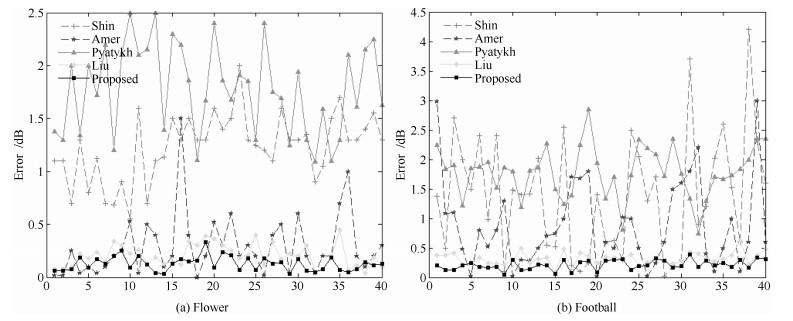
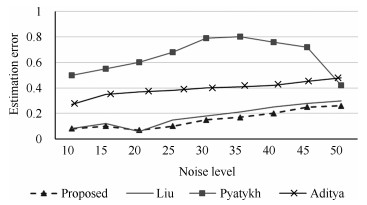
图 7 加噪40 dB视频序列(Flower, Football)估计误差
Fig. 7 Noise estimation error for 40 dB noisy sequences (Flower, Football)
表 1 不同分布函数噪声估计对比
Table 1 Comparison of noise estimation for different function
Noise level (dB) Lena Akiyo Bus Coastguard ${{\sigma }_{n}}=10$ Liu等[14] 9.68 9.88 9.69 9.79 ${{\sigma }_{n}}=10$ Proposed 9.86 9.79 9.97 9.93 ${{\sigma }_{n}}=20$ Liu等[14] 19.56 19.61 19.64 19.67 ${{\sigma }_{n}}=20$ Proposed 19.72 19.65 19.78 19.74 ${{\sigma }_{n}}=30$ Liu等[14] 29.54 29.54 29.13 29.59 ${{\sigma }_{n}}=30$ Proposed 29.65 29.81 29.50 29.67 ${{\sigma }_{n}}=40$ Liu等[14] 38.43 39.34 38.99 39.37 ${{\sigma }_{n}}=40$ Proposed 39.50 39.38 39.64 39.60  下载: 导出CSV
下载: 导出CSV
表 2 VBM3D、PID、VBM4D和本文算法的PSNR和SSIM对比
Table 2 The comparisons of PSNR and SSIM results of VBM3D, PID, VBM4D and proposed algorithm
Noise level (dB) Algorithm Akiyo PSNR/SSIM Mobile PSNR/SSIM Flowergarden PSNR/SSIM Foreman PSNR/SSIM Football PSNR/SSIM ${{\sigma }_{n}}=10$ VBM3D 35.488/0.877 32.374/0.954 34.250/0.984 34.313/0.902 33.048/0.951 ${{\sigma }_{n}}=10$ PID 31.396/0.763 29.538/0.917 31.276/0.962 31.094/0.844 30.048/0.921 ${{\sigma }_{n}}=10$ VBM4D 30.290/0.730 29.727/0.915 29.972/0.842 30.078/0.813 29.833/0.923 ${{\sigma }_{n}}=10$ Proposed 37.842/0.944 32.454/0.972 33.675/0.983 36.295/0.938 33.488/0.960 ${{\sigma }_{n}}=20$ VBM3D 30.239 /0.715 27.653/0.897 29.444/0.961 29.587/0.786 28.171/0.868 ${{\sigma }_{n}}=20$ PID 26.011/0.836 24.572/0.833 25.945/0.896 25.937/0.675 24.889/0.793 ${{\sigma }_{n}}=20$ VBM4D 29.594/0.767 27.249/0.898 27.599/0.852 28.904/0.797 27.727/0.885 ${{\sigma }_{n}}=20$ Proposed 34.986/0.925 28.322/0.936 29.386/0.957 33.098/0.878 29.890/0.894 ${{\sigma }_{n}}=30$ VBM3D 27.463/0.609 25.025/0.853 26.611/0.932 26.934/0.698 25.406/0.783 ${{\sigma }_{n}}=30$ PID 23.051/0.815 21.803/0.769 22.895/0.825 23.017/0.565 21.929/0.676 ${{\sigma }_{n}}=30$ VBM4D 29.026/0.780 25.884/0.883 26.185/0.848 28.208/0.782 26.557/0.842 ${{\sigma }_{n}}=30$ Proposed 32.579/0.866 26.045/0.898 27.098/0.932 31.379/0.835 27.995/0.825
下载: 导出CSV
-
[1] Xiong R Q, Liu H F, Zhang X F, Zhang J, Ma S W, Wu F, Gao W. Image denoising via bandwise adaptive modeling and regularization exploiting nonlocal similarity. IEEE Transactions on Image Processing, 2016, 25 (12):5793-5805 doi: 10.1109/TIP.2016.2614160 [2] Yang C C, Guo S M, Tsai J S H. Evolutionary fuzzy block-matching-based camera raw image denoising. IEEE Transactions on Cybernetics, 2017, 47 (9):2862-2871 doi: 10.1109/TCYB.2016.2611679 [3] Liu W H, Wu S Q. Superpixels-based non-local means image denoising. In: Proceedings of the 11th Conference on Industrial Electronics and Applications (ICIEA). Hefei, China: IEEE, 2016. 673-677 http://ieeexplore.ieee.org/document/7603668/ [4] Knaus C, Zwicker M. Dual-domain image denoising. In: Proceedings of the 20th IEEE International Conference on Image Processing (ICIP). Melbourne, VIC, Australia: IEEE, 2013. 440-444 http://ieeexplore.ieee.org/document/6738091 [5] Pierazzo N, Lebrun M, Rais M E, Morel M, Facciolo G. Non-local dual image denoising. In: Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP). Paris, France: IEEE, 2014. 813-817. http://ieeexplore.ieee.org/document/7025163/ [6] 肖进胜, 李文昊, 姜红, 彭红, 朱神添.基于双域滤波的三维块匹配视频去噪算法.通信学报, 2015, 36 (9):91-97 http://d.old.wanfangdata.com.cn/Periodical/txxb201509010Xiao Jin-Sheng, Li Wen-Hao, Jiang Hong, Peng Hong, Zhu Shen-Tian. Three dimensional block-matching video denoising algorithm based on dual-domain filtering. Journal on Communications, 2015, 36 (9):91-97 http://d.old.wanfangdata.com.cn/Periodical/txxb201509010 [7] Knaus C, Zwicker M. Progressive image denoising. IEEE Transactions on Image Processing, 2014, 23 (7):3114-3125 doi: 10.1109/TIP.2014.2326771 [8] Dabov K, Foi A, Katkovnik V, Egiazarian K. Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Transactions on Image Processing, 2007, 16 (8):2080-2095 doi: 10.1109/TIP.2007.901238 [9] Maggioni M, Boracchi G, Foi A, Egiazarian K. Video denoising, deblocking, and enhancement through separable 4-D nonlocal spatiotemporal transforms. IEEE Transactions on Image Processing, 2012, 21 (9):3952-3966 doi: 10.1109/TIP.2012.2199324 [10] Ghazal M, Amer A, Ghrayeb A. A real-time technique for spatio-temporal video noise estimation. IEEE Transactions on Circuits and Systems for Video Technology, 2007, 17 (12):1690-1699 doi: 10.1109/TCSVT.2007.903805 [11] Sateesh Kumar K, Sreenivasulu G, Vandar Rajan S. Block based SVD approach for Additive White Gaussian Noise level estimation in satellite images. In: Proceedings of the 3rd International Conference on Computing for Sustainable Global Development (INDIACom). New Delhi, India: IEEE, 2016. 1464-1468 http://ieeexplore.ieee.org/document/7724510/ [12] He M F, Liu M Z, Zhao C Q, Yang J B, Zhou H. An image-noise estimation approach using singular value decomposition. In: Proceedings of the 8th International Conference on Digital Image Processing (ICDIP 2016). Chengu, China: SPIE, 2016. doi: 10.1117/12.2243817 [13] Zhao H, Zhao C H. An automatic denoising method with estimation of noise level and detection of noise variability in continuous glucose monitoring. IFAC-PapersOnLine, 2016, 49 (7):785-790 doi: 10.1016/j.ifacol.2016.07.284 [14] Liu X H, Tanaka M, Okutomi M. Single-image noise level estimation for blind denoising. IEEE Transactions on Image Processing, 2013, 22 (12):5226-5237 doi: 10.1109/TIP.2013.2283400 [15] Amer A, Dubois E. Fast and reliable structure-oriented video noise estimation. IEEE Transactions on Circuits and Systems for Video Technology, 2005, 15 (1):113-118 doi: 10.1109/TCSVT.2004.837017 [16] Pyatykh S, Hesser J, Zheng L. Image noise level estimation by principal component analysis. IEEE Transactions on Image Processing, 2013, 22 (2):687-699 doi: 10.1109/TIP.2012.2221728 [17] 柳薇. SVD域的图像高斯噪声强度估计.中国图象图形学报, 2012, 17(8):923-933 http://d.old.wanfangdata.com.cn/Periodical/zgtxtxxb-a201208005Liu Wei. Gaussian noiselevel estimation in SVD domain for image. Journal of Image and Graphics, 2012, 17 (8):923-933 http://d.old.wanfangdata.com.cn/Periodical/zgtxtxxb-a201208005 [18] Das A K, Chandle J O. Accurate noise level estimation through singular values and linear regression. In: Proceedings of the 2016 IEEE International Conference on Engineering and Technology (ICETECH). Coimbatore, India: IEEE, 2016. 1132-1135 http://ieeexplore.ieee.org/document/7569427/ [19] Yin W J, Zhao H W. A novel method of video noise estimation based on motion estimation. In: Proceedings of the 2012 IEEE International Conference on Signal Processing, Communication and Computing (ICSPCC). Hong Kong, China: IEEE, 2012. 295-299 http://ieeexplore.ieee.org/document/6335636/ [20] Zlokolica V, Pizurica A, Philips W. Noise estimation for video processing based on spatio-temporal gradients. IEEE Signal Processing Letters, 2006, 13 (6):337-340 doi: 10.1109/LSP.2006.870481 [21] Yang S M, Tai S C. A fast and reliable algorithm for video noise estimation based on spatio-temporal sobel gradients. In: Proceedings of the 2011 International Conference on Electrical, Control and Computer Engineering (INECCE). Pahang, Malaysia: IEEE, 2011. 191-195 http://ieeexplore.ieee.org/document/5953874/ [22] 于墨, 赵铁军, 胡鹏龙, 郑德权.结构化学习的噪声可学习性分析及其应用.软件学报, 2013, 24 (10):2340-2353 http://d.old.wanfangdata.com.cn/Periodical/rjxb201310008Yu Mo, Zhao Tie-Jun, Hu Peng-Long, Zheng De-Quan. Theoretical analysis on structured learning with noisy data and its applications. Journal of Software, 2013, 24 (10):2340-2353 http://d.old.wanfangdata.com.cn/Periodical/rjxb201310008 [23] Sutour C, Aujol J F, Deledalle C A. Automatic estimation of the noise level function for adaptive blind denoising. In: Proceedings of the 24th European on Signal Processing Conference (EUSIPCO). Budapest, Hungary: HAL, 2016. 76-80 http://ieeexplore.ieee.org/document/7760213/ [24] 朱磊, 徐佩霞, 何佳.一种高效稳健的差分视频噪声估计算法.数据采集与处理, 2006, 21 (3):354-358 doi: 10.3969/j.issn.1004-9037.2006.03.021Zhu Lei, Xu Pei-Xia, He Jia. Fast and reliable differential video noise estimation algorithm. Journal of Data Acquisition and Processing, 2006, 21 (3):354-358 doi: 10.3969/j.issn.1004-9037.2006.03.021 [25] Leemis L M, McQueston J T. Univariate distribution relationships. The American Statistician, 2008, 62 (1):45-53 doi: 10.1198/000313008X270448 [26] Shin D H, Park R H, Yang S, Jung J H. Block-based noise estimation using adaptive Gaussian filtering. IEEE Transactions on Consumer Electronics, 2005, 51 (1):218-226 doi: 10.1109/TCE.2005.1405723 [27] ITU-R (International Telecommunications Union-Radiocommunications sector) Recommendation BT.601[Online], available: http://www.itu.int/rec/R-REC-BT.601/en -

 下载:
下载:

计量
- 文章访问数: 2212
- HTML全文浏览量: 437
- PDF下载量: 695
- 被引次数: 0
