

Robust Guaranteed Cost Consensus for High-order Discrete-time Multi-agent Systems With Switching Topologies and Time Delays
-
摘要: 研究存在参数不确定性的高阶离散时间多智能体系统在时延和联合连通切换通信拓扑条件下的鲁棒保性能一致性问题,给出一种线性一致性协议的设计方法.1)引入高阶离散时间不确定多智能体系统的鲁棒保性能一致性问题,定义基于智能体邻居状态误差和控制输入的保性能函数;2)通过构造合适的Lyapunov函数并利用离散时间系统稳定性理论,推导出一个使高阶离散时间不确定多智能体系统在该条件下获得保性能一致性的线性矩阵不等式(Linear matrix inequality,LMI)充分条件,并给出相应的保性能上界;3)以一致性序列的形式给出参数不确定条件下的高阶离散时间多智能体系统的一致性收敛结果;4)数值仿真验证了本文理论的正确性和有效性.Abstract: The robust guaranteed cost consensus problem for high-order discrete-time linear multi-agent systems with parameter uncertainties is studied, under the condition of jointly-connected interconnections and time-varying delays. A corresponding linear consensus protocol design is proposed. The idea of robust guaranteed cost control is introduced to the consensus problem. After that, a cost function is defined based on the state errors among neighboring agents and control inputs of all the agents. By constructing a suitable Lyapunov function and using the stability theory of discrete-time linear systems, a sufficient linear matrix inequality (LMI) condition, as well as an upper bound of the cost function, is derived to ensure the robust guaranteed cost consensus of the concerned systems. Then, convergence results are provided as final consensus values for the high-order discrete-time linear multi-agent systems with switching topologies and time-varying delays. Numerical experiment is carried out to demonstrate the correctness and effectiveness of the theoretical results.
-
Key words:
- Time delays /
- switching topologies /
- uncertain multi-agent systems /
- consensus /
- guaranteed cost
1) 本文责任编委 夏元清 -

图 2 状态${{\pmb{x}}}_{i1}$在参数${r_j} (j = 1, 2, 3)$变化前后的状态轨迹
Fig. 2 Comparison of state trajectories of ${{\pmb{x}}}_{i1}$ before and after parameters ${r_j}~(j = 1, 2, 3)$ change
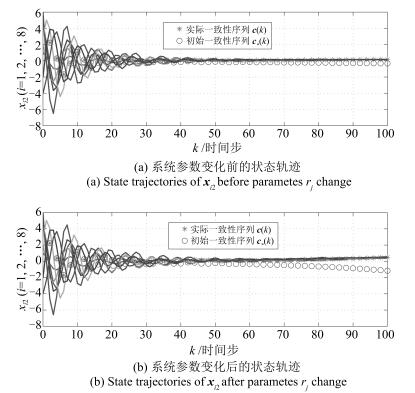
图 3 状态${{\pmb{x}}}_{i2}$在参数${r_j}~(j = 1, 2, 3)$变化前后的状态轨迹
Fig. 3 Comparison of state trajectories of ${{\pmb{x}}}_{i2}$ before and after parameters ${r_j}~(j = 1, 2, 3)$ change

图 4 状态${{\pmb{x}}}_{i3}$在参数${r_j}~(j = 1, 2, 3)$变化前后的状态轨迹
Fig. 4 Comparison of state trajectories of ${{\pmb{x}}}_{i3}$ before and after parameters ${r_j}~(j = 1, 2, 3)$ change
-
[1] Godard G, Kumar K D. Fault tolerant reconfigurable satellite formations using adaptive variable structure techniques. Journal of Guidance, Control, and Dynamics, 2010, 33(3):969-984 doi: 10.2514/1.38580 [2] 耿志勇.基于庞特里亚金极小值原理的多运载体有限时间编队控制.自动化学报, 2017, 43(1):40-59 http://www.aas.net.cn/CN/abstract/abstract18987.shtmlGeng Zhi-Yong. Finite time formation control for multiple vehicles based on Pontryagin's minimum principle. Acta Automatica Sinica, 2017, 43(1):40-59 http://www.aas.net.cn/CN/abstract/abstract18987.shtml [3] Hu Z L, Ma C, Zhang L X, Halme A, Hayat T, Ahmad B. Formation control of impulsive networked autonomous underwater vehicles under fixed and switching topologies. Neurocomputing, 2015, 147(1):291-298 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5fb417084e9221349d2ac99a5e7df214 [4] Wang R, Dong X W, Li Q D, Ren Z. Distributed adaptive formation control for linear swarm systems with time-varying formation and switching topologies. IEEE Access, 2016, 4(12):8995-9004 http://ieeexplore.ieee.org/document/7801838/ [5] Kibangou A Y. Step-size sequence design for finite-time average consensus in secure wireless sensor networks. Systems and Control Letters, 2014, 67:19-23 doi: 10.1016/j.sysconle.2014.01.010 [6] Hlinka O, Hlawatsch F, Djuric P M. Distributed sequential estimation in asynchronous wireless sensor networks. IEEE Signal Processing Letters, 2015, 22(11):1965-1969 doi: 10.1109/LSP.2015.2448601 [7] Olfati-Saber R, Murray R M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Transactions on Automatic Control, 2004, 49(9):1520-1533 doi: 10.1109/TAC.2004.834113 [8] Ren W, Beard R W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Transactions on Automatic Control, 2005, 50(5):655-661 doi: 10.1109/TAC.2005.846556 [9] 陈世明, 化俞新, 祝振敏, 赖强.邻域交互结构优化的多智能体快速蜂拥控制算法.自动化学报, 2015, 41 (12):2092-2099 http://www.aas.net.cn/CN/abstract/abstract18782.shtmlChen Shi-Ming, Hua Yu-Xin, Zhu Zhen-Min, Lai Qiang. Fast flocking algorithm for multi-agent systems by optimizing local interactive topology. Acta Automatica Sinica, 2015, 41(12):2092-2099 http://www.aas.net.cn/CN/abstract/abstract18782.shtml [10] Xi J X, Cai N, Zhong Y S. Consensus problems for high-order linear time-invariant swarm systems. Physica A:Statistical Mechanics and Its Applications, 2010, 389(24):5619-5627 doi: 10.1016/j.physa.2010.08.038 [11] 吴苗苗, 张皓, 严怀成, 陈世明.异步切换多智能体系统的协同输出调节.自动化学报, 2017, 43(5):735-742 http://www.aas.net.cn/CN/abstract/abstract19051.shtmlWu Miao-Miao, Zhang Hao, Yan Huai-Cheng, Chen Shi-Ming. Cooperative output regulation for asynchronously switched multi-agent systems. Acta Automatica Sinica, 2017, 43(5):735-742 http://www.aas.net.cn/CN/abstract/abstract19051.shtml [12] Zhang G L, Xu J, Zeng J, Xi J X, Tang W J. Consensus of high-order discrete-time linear networked multi-agent systems with switching topology and time delays. Transactions of the Institute of Measurement and Control, 2016, 389(24):1-13 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1177/0142331216629197 [13] Su Y F, Huang J. Two consensus problems for discrete-time multi-agent systems with switching network topology. Automatica, 2012, 48(9):1988-1997 doi: 10.1016/j.automatica.2012.03.029 [14] Cheng Y, Ugrinovskii V. Guaranteed performance leader-follower control for multiagent systems with linear IQC-constrained coupling. In: Proceedings of the 2013 American Control Conference (ACC). Washington DC, USA: ACC, 2013. 2625-2630 [15] Wang Z, Xi J X, Yao Z C, Liu G B. Guaranteed cost consensus for multi-agent systems with fixed topologies. Asian Journal of Control, 2015, 17(2):729-735 doi: 10.1002/asjc.v17.2 [16] Wang Z, Xi J, Yao Z C, Liu G B. Guaranteed cost consensus problems for second-order multi-agent systems. In: Proceedings of the 33rd Chinese Control Conference (CCC). Nanjing, China: IEEE, 2014. [17] Guan Z H, Hu B, Chi M, He D X, Cheng X M. Guaranteed performance consensus in second-order multi-agent systems with hybrid impulsive control. Automatica, 2014, 50(9):2415-2418 doi: 10.1016/j.automatica.2014.07.008 [18] 徐君, 张国良, 曾静, 汤文俊, 黄鑫.离散时间高阶不确定线性多个体系统保性能一致性分析.控制理论与应用, 2016, 33(6):841-848 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201606017Xu Jun, Zhang Guo-Liang, Zeng Jing, Tang Wen-Jun, Huang Xin. Guaranteed cost consensus analyses of discrete-time high-order uncertain linear multi-agent systems. Control Theory and Applications, 2016, 33(6):841-848 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201606017 [19] Fax J A, Murray R M. Information flow and cooperative control of vehicle formations. IEEE Transactions on Automatic Control, 2004, 49(9):1465-1476 doi: 10.1109/TAC.2004.834433 [20] Wu M, He Y, She J H, Liu G P. Delay-dependent criteria for robust stability of time-varying delay systems. Automatica, 2004, 40(8):1435-1439 doi: 10.1016/j.automatica.2004.03.004 [21] Wang Y Y, Xie L H, de Souza C E. Robust control of a class of uncertain nonlinear systems. Systems and Control Letters, 1992, 19(2):139-149 doi: 10.1016/0167-6911(92)90097-C [22] Ghaoui L, Feron E, Balakrishnan V. Linear matrix inequalities in system and control theory. Studies in Applied and Numerical Mathematics. Philadelphia: Society for Industrial and Applied Mathematics, 1994. [23] Boyd S, El Ghaoui L, Oustry F, AitRami M. A cone complementarity linearization algorithm for static output-feedback and related problems. IEEE Transactions on Automatic Control, 1997, 42(8):1171-1176 doi: 10.1109/9.618250 [24] Kim H, Shim H, Seo J H. Output consensus of heterogeneous uncertain linear multi-agent systems. IEEE Transactions on Automatic Control, 2011, 56(1):200-206 doi: 10.1109/TAC.2010.2088710 -

 下载:
下载:




计量
- 文章访问数: 3202
- HTML全文浏览量: 1382
- PDF下载量: 626
- 被引次数: 0
