

Dynamic Feature Extraction of Nonlinear Systems With Deterministic Learning Theory and Spatio-temporal Lempel-Ziv Complexity
-
摘要: 对非线性系统产生的非线性非平稳信号进行有效的特征表达是特征提取领域重要且困难的问题.本文基于确定学习理论和Lempel-Ziv复杂度(LZ复杂度)提出一种新的非线性系统动态特征提取方法.新方法将从系统的动力学轨迹中提取特征.通过确定学习理论对产生回归轨迹的非线性动力学系统的未知系统动态进行局部准确建模/辨识,1)使用LZ复杂度对辨识得到的动力学轨迹进行特征表达,并提出时间复杂度和空间复杂度两个指标组成时空LZ复杂度,从时间域和空间域的角度刻画系统动力学轨迹的复杂程度.2)对提出的动态特征提取方法进行敏感度分析,定量评价系统的动态特征指标相对于系统从周期轨迹到混沌轨迹的参数变化敏感程度.3)通过数值仿真和实验分析以验证动态特征提取的有效性.与从系统状态轨迹中提取特征相比,本文提出的动态特征提取方法可以从系统内在动态的角度对原系统进行更好的表达.
-
关键词:
- 动态特征提取 /
- 确定学习 /
- 时空Lempel-Ziv复杂度 /
- 敏感度分析
Abstract: Effective feature characterization of nonlinear and non-stationary signals is an important and challenging problem in feature extraction. This paper presents a new dynamic feature extraction method for nonlinear dynamical systems based on deterministic learning theory and Lempel-Ziv complexity (LZ complexity). The proposed method extracts features from the dynamics trajectory of nonlinear system. Through the deterministic learning theory, the unknown system dynamics is accurately identified in a local region along the recurrent trajectories of nonlinear system. Firstly, the LZ complexity is used to characterize the obtained dynamics trajectory. A temporal-LZ complexity (TLZC) index and a spatio-LZ complexity (SLZC) index are constructed to quantify the complexity of the system dynamics trajectory in the time-domain and space-domain. In addition, sensitivity analysis is conducted for the dynamics feature characterization, which evaluates the sensitivity of system dynamic indices with respect to parameter changes from period trajectory to chaotic trajectory. Finally, numerical simulation and experiments are carried out to demonstrate the effectiveness of the proposed method. Compared with the state features, the advantage of using the proposed dynamic features is a better representation of the original system by inclusion of internal dynamics information.1) 本文责任编委 孙长银 -

图 1 Rossler系统状态$x_{1}$的倍周期分岔过程
Fig. 1 The period-doubling bifurcation diagram of the state $x_{1}$ of the Rossler system
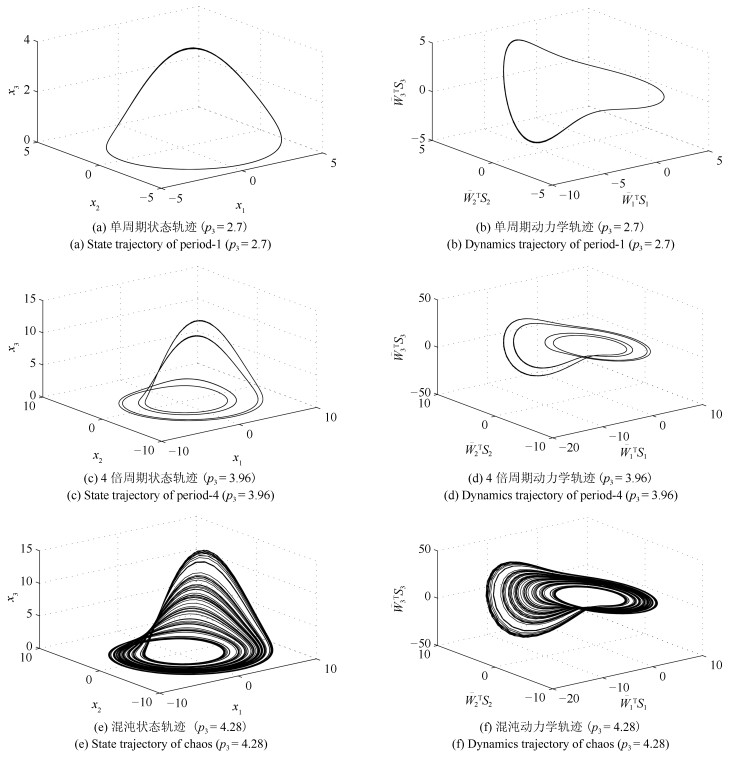
图 2 Rossler系统的状态轨迹和动力学轨迹图
Fig. 2 The state trajectory and dynamics trajectory of the Rossler system
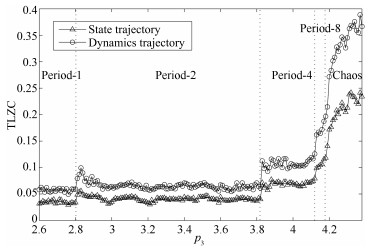
图 3 系统的状态轨迹和动力学轨迹时间复杂度指标图
Fig. 3 The TLZC indices of state trajectory and dynamics trajectory of the Rossler system
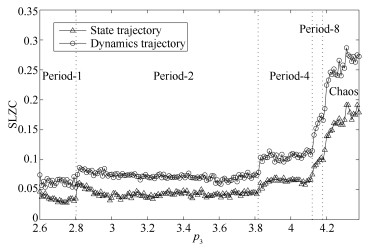
图 4 系统的状态轨迹和动力学轨迹空间复杂度指标图
Fig. 4 The SLZC indices of state trajectory and dynamics trajectory of the Rossler system

图 7 Rossler系统2倍周期Hilbert边际谱图
Fig. 7 The Hilbert marginal spectrum of period-2 of Rossler system

图 8 系统从失速前进入到旋转失速初始扰动阶段的过程
Fig. 8 Time evolution of the first flow state before rotating stall

图 9 失速前到旋转失速初始扰动阶段状态、动力学轨迹的时间复杂度TLZC
Fig. 9 The TLZC index of the system state and dynamics trajectory before rotating stall
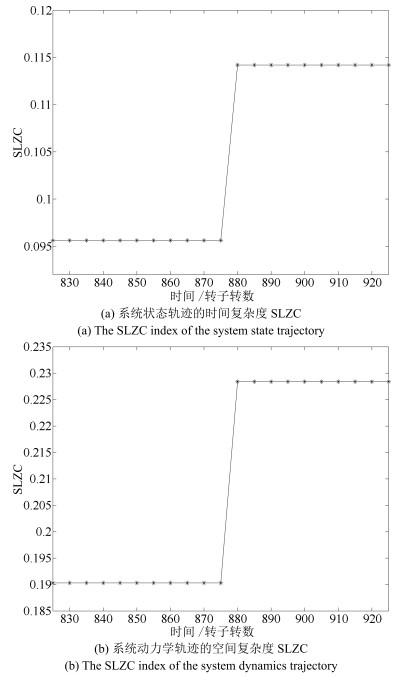
图 10 失速前到旋转失速初始扰动阶段状态、动力学轨迹的空间复杂度SLZC
Fig. 10 The SLZC index of the system state and dynamics trajectory before rotating stall
表 1 Rossler系统的敏感度系数
Table 1 The sensitivity coefficients of the Rossler system
系统状态变化 η1(TLZC) η2(TLZC) η1(SLZC) η2(SLZC) period (1 ~ 2) 0.0018 0.0229 0.0247 0.0268 period (2 ~ 4) 0.0906 0.1345 0.0577 0.0925 period (4 ~ 8) 0.3646 0.6401 0.2980 0.5098 period (8 ~ chaos) 1.4589 2.2767 0.9603 1.3192  下载: 导出CSV
下载: 导出CSV
表 2 失速前到初始扰动过程的时空复杂度指标敏感度系数
Table 2 The sensitivity coefficients of the normal system to stall precursors
失速前到初始扰动状态变化 η1 η2 TLZC 0.022 0.027 SLZC 0.022 0.043
下载: 导出CSV
-
[1] Huang N E, Shen Z, Long S R, Wu M C, Shih H H, Zheng Q N, Yen N C, Tung C C, Liu H H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proceedings of the Royal Society A:Mathematical, Physical and Engineering Sciences, 1998, 454(1971):903-995 doi: 10.1098/rspa.1998.0193 [2] Zhang H J, Bi G A, Razul S G, See C M S. Robust time-varying filtering and separation of some nonstationary signals in low SNR environmentsx. Signal Processing, 2015, 106:141-158 https://www.researchgate.net/publication/264980853_Robust_time-varying_filtering_and_separation_of_some_nonstationary_signals_in_low_SNR_environments [3] Brigham E O. The Fast Fourier Transform and Its Applications. Englewood Cliffs, New Jersey, USA:Prentice Hall, 1988. [4] Rai V K, Mohanty A R. Bearing fault diagnosis using FFT of intrinsic mode functions in Hilbert-Huang transform. Mechanical Systems and Signal Processing, 2007, 21(6):2607-2615 https://www.researchgate.net/publication/223040719_Bearing_fault_diagnosis_using_FFT_of_intrinsic_mode_functions_in_HilbertHuang_transform [5] Feng Z P, Liang M, Chu F L. Recent advances in time-frequency analysis methods for machinery fault diagnosis:a review with application examples. Mechanical Systems and Signal Processing, 2013, 38(1):165-205 doi: 10.1016/j.ymssp.2013.01.017 [6] Akhtar M T, Mitsuhashi W, James C J. Employing spatially constrained ICA and wavelet denoising, for automatic removal of artifacts from multichannel EEG data. Signal Processing, 2012, 92(2):401-416 doi: 10.1016/j.sigpro.2011.08.005 [7] Yan J H, Lu L. Improved Hilbert-Huang transform based weak signal detection methodology and its application on incipient fault diagnosis and ECG signal analysis. Signal Processing, 2014, 98:74-87 doi: 10.1016/j.sigpro.2013.11.012 [8] Boffetta G, Cencini M, Falcioni M, Vulpiani A. Predictability:a way to characterize complexity. Physics Reports, 2002, 356(6):367-474 doi: 10.1016/S0370-1573(01)00025-4 [9] Hu J, Gao J B, Tung W W. Characterizing heart rate variability by scale-dependent Lyapunov exponent. Chaos, 2009, 19(2):Article No. 028506 http://cn.bing.com/academic/profile?id=784de32816f02e68e36e30c568cec669&encoded=0&v=paper_preview&mkt=zh-cn [10] Aboy M, Hornero R, Abásolo D, Álvarez D. Interpretation of the Lempel-Ziv complexity measure in the context of biomedical signal analysis. IEEE Transactions on Biomedical Engineering, 2006, 53(11):2282-2288 doi: 10.1109/TBME.2006.883696 [11] Tabor M. Chaos and Integrability in Nonlinear Dynamics:An Introduction. New York, USA:Wiley, 1989. [12] Lee J, Wu F J, Zhao W Y, Ghaffari M, Liao L X, Siegel D. Prognostics and health management design for rotary machinery systems——reviews, methodology and applications. Mechanical Systems and Signal Processing, 2014, 42(1-2):314-334 https://www.researchgate.net/publication/258440016_Prognostics_and_health_management_design_for_rotary_machinery_systemsReviews_methodology_and_applications [13] Shilnikov L P, Shilnikov A L, Turaev D V, Chua L O. Methods of Qualitative Theory in Nonlinear Dynamics, Part Ⅰ. Singapore:World Scientific, 2001. [14] Shilnikov L P, Shilnikov A L, Turaev D V, Chua L O. Methods of Qualitative Theory in Nonlinear Dynamics, Part Ⅱ. Singapore:World Scientific, 2001. [15] Wang C, Hill D J. Learning from neural control. IEEE Transactions on Neural Networks, 2006, 17(1):130-146 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy200403025 [16] Wang C, Hill D J. Deterministic Learning Theory for Identification, Recognition, and Control. Boca Raton, FL, USA:CRC Press, 2009. [17] 王聪, 陈填锐, 刘腾飞.确定学习与基于数据的建模及控制.自动化学报, 2009, 35(6):693-706 http://www.aas.net.cn/CN/abstract/abstract13333.shtmlWang Cong, Chen Tian-Rui, Liu Teng-Fei. Deterministic learning and data-based modeling and control. Acta Automatica Sinica, 2009, 35(6):693-706 http://www.aas.net.cn/CN/abstract/abstract13333.shtml [18] Wang C, Chen T R. Rapid detection of small oscillation faults via deterministic learning. IEEE Transactions on Neural Networks, 2011, 22(8):1284-1296 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JJ0222163137 [19] 王聪, 文彬鹤, 司文杰, 彭滔, 袁成志, 陈填锐, 林文愉, 王勇, 侯安平.轴流压气机旋转失速建模与检测, Ⅰ:基于确定学习理论与高阶Moore-Greitzer模型的研究.自动化学报, 2014, 40(7):1265-1277 http://www.aas.net.cn/CN/abstract/abstract18397.shtmlWang Cong, Wen Bin-He, Si Wen-Jie, Peng Tao, Yuan Cheng-Zhi, Chen Tian-Rui, Lin Wen-Yu, Wang Yong, Hou An-Ping. Modeling and detection of rotating stall in axial flow compressors, Part Ⅰ:investigation on high-order M-G models via deterministic learning. Acta Automatica Sinica, 2014, 40(7):1265-1277 http://www.aas.net.cn/CN/abstract/abstract18397.shtml [20] Wang C, Dong X D, Ou S X, Wang W, Hu J M, Yang F F. A new method for early detection of myocardial ischemia:cardiodynamicsgram (CDG). Science China Information Sciences, 2016, 59(1):1-11 http://cn.bing.com/academic/profile?id=c35a3986129f1930685efd09e6629ffc&encoded=0&v=paper_preview&mkt=zh-cn [21] Lempel A, Ziv J. On the complexity of finite sequences. IEEE Transactions on Infromation Theory, 1976, 22(1):75-81 doi: 10.1109/TIT.1976.1055501 [22] Kaspar F, Schuster H G. Easily calculable measure for the complexity of spatiotemporal patterns. Physical Review A, 1987, 36(2):842-848 doi: 10.1103/PhysRevA.36.842 [23] Rapp P E, Cellucci C J, Korslund K E, Watanabe T A, Jiménez-Moñtano M A. Effective normalization of complexity measurements for epoch length and sampling frequency. Physical Review E, 2001, 64(1):Article No. 016209 doi: 10.1103-PhysRevE.64.016209/ [24] Out H H, Sayood K. A new sequence distance measure for phylogenetic tree construction. Bioinformatics (Oxford, England), 2003, 19(16):2122-2130 doi: 10.1093/bioinformatics/btg295 [25] Yan R Q, Gao R X. Complexity as a measure for machine health evaluation. IEEE Transaction on Instrumentation and Measurement, 2004, 53(4):1327-1334 doi: 10.1109/TIM.2004.831169 [26] Savageau M A. Parameter sensitivity as a criterion for evaluating and comparing the performance of biochemical systems. Nature, 1971, 229(5286):542-544 doi: 10.1038/229542a0 [27] Wu W H, Wang F S, Chang M S. Dynamic sensitivity analysis of biological systems. BMC Bioinformatics, 2008, 9(Suppl 12):S17 doi: 10.1186/1471-2105-9-S12-S17 [28] Wang P, Lv J H, Ogorzalek M J. Global relative parameter sensitivities of the feed-forward loops in genetic networks. Neurocomputing, 2012, 78(1):155-165 doi: 10.1016/j.neucom.2011.05.034 [29] Lu B Y, Yue H. Developing objective sensitivity analysis of periodic systems:case studies of biological oscillators. Acta Automatica Sinica, 2012, 38(7):1065-1073 [30] Varma A, Morbidelli M, Wu H. Parametric Sensitivity in Chemical Systems. Cambridge:Cambridge University Press, 1999. [31] Kolmogorov A N. Three approaches to the quantitative definition of information. International Journal of Computer Mathematics, 1968, 2(1-4):157-168 http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_quant-ph%2f9907035 [32] Zhang X S, Roy R J, Jensen E W. EEG complexity as a measure of depth of anesthesia for patients. IEEE Transactions on Biomedical Engineering, 2001, 48(12):1424-1433 doi: 10.1109-10.966601/ [33] Sen A K. Complexity analysis of riverflow time series. Stochastic Environmental Research and Risk Assessment, 2009, 23(3):361-366 doi: 10.1007/s00477-008-0222-x [34] Hong H, Liang M. Fault severity assessment for rolling element bearings using the Lempel-Ziv complexity and continuous wavelet transform. Journal of Sound and Vibration, 2009, 320(1-2):452-468 doi: 10.1016/j.jsv.2008.07.011 [35] Hu J, Gao J B, Principe J C. Analysis of biomedical signals by the Lempel-Ziv complexity:the effect of finite data size. IEEE Transactions on Biomedical Engineering, 2006, 53(12):2606-2609 http://ieeexplore.ieee.org/xpls/abs_all.jsp?isnumber=4359967&arnumber=4015609 [36] Estevez-Rams E, Serrano R L, Fernández B A, Reyes I B. On the non-randomness of maximum Lempel-Ziv complexity sequences of finite size. Chaos, 2013, 23(2):023118 doi: 10.1063/1.4808251 [37] Amigo J M, Kennel M B. Variance estimators for the Lempel-Ziv entropy rate estimator. Chaos, 2006, 16(4):Article No. 043102 http://cn.bing.com/academic/profile?id=70e9b7ddae6db22c4223ffe9937ff000&encoded=0&v=paper_preview&mkt=zh-cn [38] Estevezrams E, Loraserrano R, Nunes C A J, Aragónfernán-dez B. Lempel-Ziv complexity analysis of one dimensional cellular automata. Chaos, 2015, 25(12):Article No. 123106 doi: 10.1063/1.4936876 [39] Li J K, Song X R, Yin K. Discrete capability of the Lempel-Ziv complexity algorithm on a vibration sequence. Chinese Physics Letters, 2010, 27(6):Article No. 060502 http://cn.bing.com/academic/profile?id=199740929bfa271da53ff6474b09c199&encoded=0&v=paper_preview&mkt=zh-cn [40] Radhakrishnan N, Wilson J D, Loizou P C. An alternate partitioning technique to quantify the regularity of complex time series. International Journal of Bifurcation and Chaos, 2000, 10(7):1773-1779 doi: 10.1142/S0218127400001092 [41] Sarlabous L, Torres A, Fiz J A, Morera J, Jané R. Index for estimation of muscle force from mechanomyography based on the Lempel-Ziv algorithm. Journal of Electromyography and Kinesiology, 2013, 23(3):548-557 doi: 10.1016/j.jelekin.2012.12.007 [42] Gray A, Abbena E, Salamon S. Modern Differential Geometry of Curves and Surfaces with Mathematica. Boca Raton:CRC Press, 1998. [43] Chen D F, Wang C, Dong X D. Modeling of nonlinear dynamical systems based on deterministic learning and structural stability. Science China Information Sciences, 2016, 59(9):Article No. 92202 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=JFXG201609008&dbname=CJFD&dbcode=CJFQ [44] Rössler O E. An equation for continuous chaos. Physics Letters A, 1976, 57(5):397-398 doi: 10.1016/0375-9601(76)90101-8 [45] Chen G R, Dong X N. From Chaos to Order:Methodologies, Perspectives, and Applications. Singapore:World Scientific, 1998. [46] Paduano J D. Analysis of compression system dynamics. Active Control of Engine Dynamics, 2002, 8:1-36 http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_cond-mat%2f0207321 [47] Kamath C. A risk stratification system to discriminate congestive heart failure patients using multivalued coarse-graining Lempel-Ziv complexity. Journal of Engineering Science and Technology, 2015, 10(1):12-24 -

 下载:
下载:



计量
- 文章访问数: 2018
- HTML全文浏览量: 524
- PDF下载量: 671
- 被引次数: 0
