

-
摘要: 高速铁路道岔是与高速列车直接接触的重要信号设备,其控制电路的故障检测手段目前仍停留在简单仪器与人的经验相结合的方式.为了实现道岔控制电路故障的智能诊断,提高故障诊断的准确率并降低单一诊断方法带来的不确定性,本文提出一种基于群决策的诊断方法:首先根据道岔控制电路的特点,总结了典型的11个故障模式和对应的8个故障特征;其次,分别采用模糊理论、神经网络和支持向量机(Support vector machine,SVM)对道岔控制电路进行故障诊断;然后引入群决策理论将三种方法视为决策专家,通过群基数效应集结方式实现决策级上的信息融合从而得到群专家综合评判的诊断结果.从仿真数据的验证来看,该方法比单一方法的故障诊断的准确率要高,表明了本文所提方法能够实现三种方法的互补融合,也提高了故障诊断的准确率,在该领域有着良好的应用前景.Abstract: High speed railway turnout is an important signal device that directly touches the high speed train. However, it still depends on simple instruments and human experience to deal with the faults of the control circuit. In order to realize intelligent fault diagnosis for the turnout control circuit, improve diagnosis accuracy and decrease uncertainty that a single method may bring about, a fault diagnosis method based on group decision making strategy is proposed. Firstly 11 typical fault modes and 8 corresponding fault features are summarized according to the characteristics of the control circuit. Secondly, fuzzy theory, neural network and support vector machine (SVM) are adopted to conduct the diagnosis process, respectively, then group decision making strategy is introduced, which regards the above three methods as three different experts. Ultimately, the final comprehensive diagnosis result is achieved by utilizing the group cardinal utility method on the three experts. Simulation result shows that compared with all three individual methods, the proposed method achieves a better performance on the diagnosis accuracy, indicating that the proposed method can integrate the advantages of the three methods and have a great application prospect in the field.1) 本文责任编委 钟麦英
-
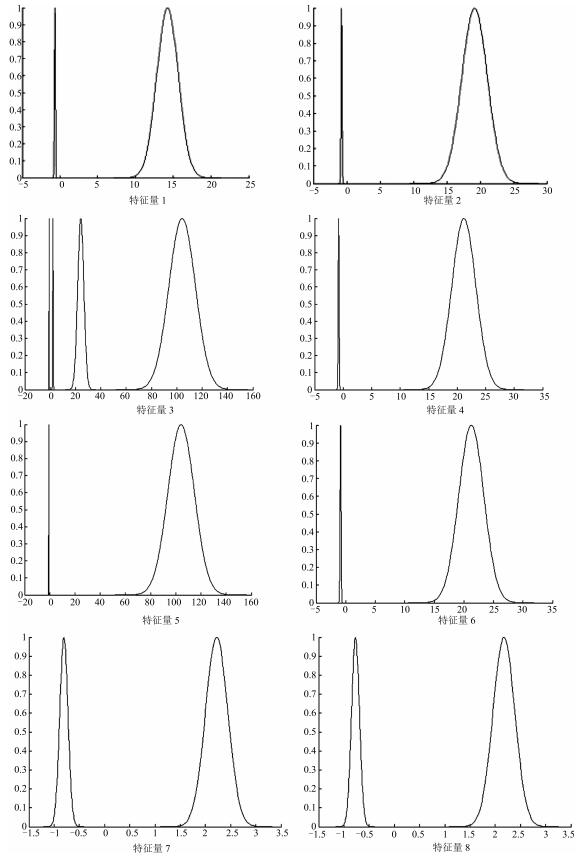
图 3 8个特征量的隶属度函数分布图
Fig. 3 Distribution of membership functions of eight characteristic quantities

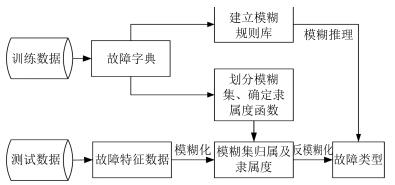
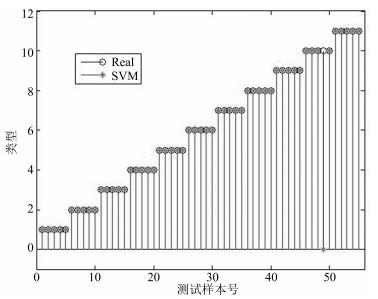
图 5 基于模糊字典法的故障诊断测试结果
Fig. 5 Fault diagnosis test results based on fuzzy dictionary method
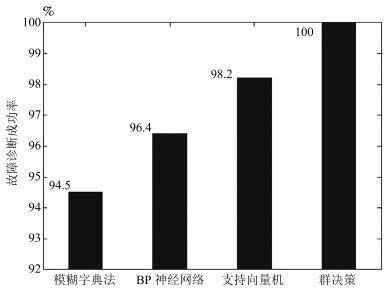
图 9 四种方法的诊断成功率对比
Fig. 9 Comparison of diagnostic success rates between the four methods
表 1 道岔控制电路故障
Table 1 Fault of turnout control circuit
ID 描述 $A0$ 无故障 $A1$ 室外X1支路断线 $A2$ 室内1DQJ断线 $A3$ 室内1DQJF断线 $A4$ $R_1$开路 $A5$ 室内表示继电器断线 $A6$ 室外继电器支路开路 $A7$ 室外二极管支路击穿 $A8$ 室外二极管支路开路 $A9$ 整流匣短路 $A10$ V线圈开路  下载: 导出CSV
下载: 导出CSV
表 2 ZDJ9型道岔控制电路故障字典
Table 2 Fault dictionary for ZDJ9 turnout control circuit
类型 $B1$ $B2$ $B3$ $ B4$ $ B5$ $ B6$ $ B7$ $ B8$ $A0$ 50 21 57 22 57 22 0 0 $A1$ 0 0 0 0 110 0 110 0 $A2$ 0 0 0 0 0 0 0 0 $A3$ 15 0 100 0 0 0 0 0 $A4$ 0 0 110 0 110 0 0 0 $A5$ 40 20 0 0 69 75 0 0 $A6$ 80 0 25 0 25 0 2 0 $A7$ 25 0 105 0 105 0 0 0 $A8$ 40 20 0 0 70 75 70 75 $A9$ 104 0 3 0 6 0 3 3 $A10$ 66 38 0 0 73 0 73 0
下载: 导出CSV
表 3 道岔控制电路故障模糊集中心点
Table 3 Fuzzy focus point of fault in turnout control circuit
$B1$ $ B2 $ $ B3$ $ B4$ $ B5$ $ B6$ $ B7$ $B8$ 0 0 0 0 0 0 -0.75 0 14.8 19.5 3 22 110 23 2.4 2.4 25 108
下载: 导出CSV
-
[1] Supavatanakul P, Lunze J, Puig V, Quevedo J. Diagnosis of timed automata:theory and application to the DAMADICS actuator benchmark problem. Control Engineering Practice, 2006, 14(6):609-619 doi: 10.1016/j.conengprac.2005.03.028 [2] Previdi F, Parisini T. Model-free actuator fault detection using a spectral estimation approach:the case of the DAMADICS benchmark problem. Control Engineering Practice, 2006, 14(6):635-644 doi: 10.1016/j.conengprac.2005.04.001 [3] Pedregal D J, García F P, Schmid F. RCM, predictive maintenance of railway systems based on unobserved components models. Reliability Engineering and System Safety, 2004, 83(1):103-110 doi: 10.1016/j.ress.2003.09.020 [4] Zattoni E. Detection of incipient failures by using an H2-norm criterion:application to railway switching points. Control Engineering Practice, 2006, 14(8):885-895 doi: 10.1016/j.conengprac.2005.05.004 [5] Puig V, Stancu A, Escobet T, Nejjari F, Quevedo J, Patton R J. Passive robust fault detection using interval observers:application to the DAMADICS benchmark problem. Control Engineering Practice, 2006, 14(6):621-633 doi: 10.1016/j.conengprac.2005.03.016 [6] García Márquez F P, Schmid F, Collado J C. Wear assessment employing remote condition monitoring:a case study. Wear, 2003, 255(7-12):1209-1220 doi: 10.1016/S0043-1648(03)00214-X [7] Calado J M F, Sáda Costa J M G, Bartys M, Korbicz J. FDI approach to the DAMADICS benchmark problem based on qualitative reasoning coupled with fuzzy neural networks. Control Engineering Practice, 2006, 14(6):685-698 doi: 10.1016/j.conengprac.2005.03.025 [8] 杨阳, 陶彩霞, 张睿兴.遗传算法优化支持向量机的道岔控制电路故障诊断.计算机测量与控制, 2013, 21(1):48-50 http://cdmd.cnki.com.cn/Article/CDMD-10287-1011292003.htmYang Yang, Tao Cai-Xia, Zhang Rui-Xing. Fault diagnosis of switch control circuit using support vector machine optimized by genetic algorithm. Computer Measurement and Control, 2013, 21(1):48-50 http://cdmd.cnki.com.cn/Article/CDMD-10287-1011292003.htm [9] García Márquez F P, Pedregal Tercero D J, Schmid F. Unobserved component models applied to the assessment of wear in railway points:a case study. European Journal of Operational Research, 2007, 176(3):1703-1712 doi: 10.1016/j.ejor.2005.10.037 [10] 王思明, 雷烨.一种基于LS-SVM的道岔控制电路故障诊断.兰州交通大学学报, 2010, 29(4):1-5 http://mall.cnki.net/magazine/Article/LZTX201004002.htmWang Si-Ming, Lei Ye. Fault diagnosis for railway switch control circuit based on ARPSO least squares support vector machine. Journal of Lanzhou Jiaotong University, 2010, 29(4):1-5 http://mall.cnki.net/magazine/Article/LZTX201004002.htm [11] Huang Z J, Wang Z S, Zhang H G. Multilevel feature moving average ratio method for fault diagnosis of the microgrid inverter switch. IEEE/CAA Journal of Automatica Sinica, 2017, 4(2):177-185 doi: 10.1109/JAS.2017.7510496 [12] 董炜, 陈卫征, 徐晓滨, 吉吟东.基于可分性测度的模糊隶属函数确定方法.控制与决策, 2014, 29(11):2089-2091 http://www.cnki.com.cn/Article/CJFDTotal-KZYC201411030.htmDong Wei, Chen Wei-Zheng, Xu Xiao-Bin, Ji Yin-Dong. Determination method of fuzzy membership function based on separability measure. Control and Decision, 2014, 29(11):2089-2093 http://www.cnki.com.cn/Article/CJFDTotal-KZYC201411030.htm [13] 骆志明, 冯庚斌.机车车辆滚动轴承故障BP网络诊断方法.中国铁道科学, 1998, 19(4):26-32 http://mall.cnki.net/magazine/Article/TDYY200704015.htmLuo Zhi-Ming, Feng Geng-Bin. BP network fault diagnosis of ball bearing in locomotive and cars. China Railway Science, 1998, 19(4):26-32 http://mall.cnki.net/magazine/Article/TDYY200704015.htm [14] 徐晓滨, 张镇, 李世宝, 文成林.基于诊断证据静态融合与动态更新的故障诊断方法.自动化学报, 2016, 42(1):107-121 http://www.aas.net.cn/CN/abstract/abstract18800.shtmlXu Xiao-Bin, Zhang Zhen, Li Shi-Bao, Wen Cheng-Lin. Fault diagnosis based on fusion and updating of diagnosis evidence. Acta Automatica Sinica, 2016, 42(1):107-121 http://www.aas.net.cn/CN/abstract/abstract18800.shtml [15] 郭欣, 王蕾, 宣伯凯, 李彩萍.基于有监督Kohonen神经网络的步态识别.自动化学报, 2017, 43(3):430-438 http://www.aas.net.cn/CN/abstract/abstract19021.shtmlGuo Xin, Wang Lei, Xuan Bo-Kai, Li Cai-Ping. Gait recognition based on supervised Kohonen neural network. Acta Automatica Sinica, 2017, 43(3):430-438 http://www.aas.net.cn/CN/abstract/abstract19021.shtml [16] Zhang P Y, Shu S, Zhou M C. An online fault detection model and strategies based on SVM-grid in clouds. IEEE/CAA Journal of Automatica Sinica, 2018, 5(2):445-456 doi: 10.1109/JAS.2017.7510817 [17] 万俊, 邢焕革, 张晓晖.基于熵理论的多属性群决策专家权重的调整算法.控制与决策, 2010, 25(6):907-910 http://www.oalib.com/paper/4221554Wan Jun, Xing Huan-Ge, Zhang Xiao-Hui. Algorithm of adjusting weights of decision-makers in multi-attribute group decision-making based on entropy theory. Control and Decision, 2010, 25(6):907-910 http://www.oalib.com/paper/4221554 [18] 董春玲, 张勤.用于不确定性故障诊断的权重逻辑推理算法研究.自动化学报, 2014, 40(12):2766-2781 http://www.aas.net.cn/CN/abstract/abstract18556.shtmlDong Chun-Ling, Zhang Qin. Research on weighted logical inference for uncertain fault diagnosis. Acta Automatica Sinica, 2014, 40(12):2766-2781 http://www.aas.net.cn/CN/abstract/abstract18556.shtml -

 下载:
下载:




计量
- 文章访问数: 3391
- HTML全文浏览量: 310
- PDF下载量: 810
- 被引次数: 0
