

Connotation and Research of Reconfigurability for Spacecraft Control Systems:A Review
-
摘要: 可重构性设计是提高航天器在轨运行质量的有效途径,可以从系统层面克服航天器控制系统固有可靠性不足、星上资源受限以及在轨故障不可维修等缺陷,目前已引起控制理论和航天器控制工程等领域的高度重视与广泛关注.本文首先结合航天器控制系统的固有特点,具体介绍可重构性的研究意义与概念内涵.然后从评价与设计两方面,详细梳理航天器控制系统可重构性的研究内容与研究现状.最后对目前可重构性研究领域中存在的一些问题以及未来可能的发展方向进行深入探讨.Abstract: Since control reconfigurability design can overcome the inherent deficiency of reliability insufficiency, limitation of resource and unrepairability of fault for spacecraft control system, it is the fundamental approach to improve the operational quality of on-orbit spacecraft, which has attracted intensive attention from both control theory field and spacecraft control engineering field. First of all, the research significance, connotation and research range of reconfigurability for spacecraft control system are described in detail. Then, the current research status of control reconfigurability is summarized from the aspects of reconfigurability evaluation and reconfigurability design. Finally, problems to be solved are presented and some countermeasures and suggestions are put forward.1) 本文责任编委 孙富春
-
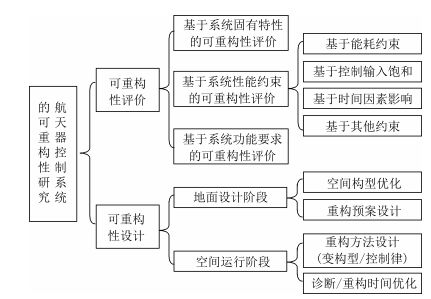
图 2 航天器控制系统可重构性的研究内容
Fig. 2 Research contents of reconfigurability of spacecraft control system
表 1 可靠性与可重构性的对比分析
Table 1 The comparative analysis of reliability and reconfigurability
可靠性 可重构性 研究范畴 系统运行质量特性 研究对象 统计特性 功能特性 研究目的 预防故障 处理故障 优化手段 提高冗余量 优化冗余分配 时间维度 $\surd$ 空间维度 2(逻辑关系) 3(空间构型) 限制因素 生产因素
(成本/重量/工艺)性能因素
(资源/时间/输出) 下载: 导出CSV
下载: 导出CSV
表 2 控制可重构性评价方法对比
Table 2 Comparison of different control reconfigurability evaluation methods
思路 优点 不足 基于系统
固有特性基于一般控制理论, 通用
性强, 物理意义明确未考虑实际限制约束 基于系统
性能约束考虑各项性能约束, 更具
工程实际意义各项约束综合方
法尚无统一标准基于系统
功能要求可用于大型复杂系统 运算量大、模型
复杂, 依靠经验
下载: 导出CSV
-
[1] 李文博, 王大轶, 刘成瑞.动态系统实际故障可诊断性的量化评价研究.自动化学报, 2014, 41(3):497-507 http://www.aas.net.cn/CN/abstract/abstract18628.shtmlLi Wen-Bo, Wang Da-Yi, Liu Cheng-Rui. Quantitative evaluation of actual fault diagnosability for dynamic systems. Acta Automatica Sinica, 2014, 41(3):497-507 http://www.aas.net.cn/CN/abstract/abstract18628.shtml [2] 段文杰, 王大轶, 刘成瑞.卫星控制系统离散积分滑模容错控制.控制理论与应用, 2015, 32(2):133-141 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201502001.htmDuan Wen-Jie, Wang Da-Yi, Liu Cheng-Rui. Discrete-time integral sliding-mode fault-tolerant controller for satellite control system. Control Theory and Applications, 2015, 32(2):133-141 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201502001.htm [3] Yin S, Xiao B, Ding S X, Zhou D H. A review on recent development of spacecraft attitude fault tolerant control system. IEEE Transactions on Industrial Electronics, 2016, 63(5):3311-3320 doi: 10.1109/TIE.2016.2530789 [4] Frei C W, Kraus F J, Blanket M. Recoverability viewed as a system property. In:Proceedings of the 1999 European Control Conference (ECC). Karlsruhe, Germany:IEEE, 1999. 2197-2202 [5] Wu N E, Zhou K M, Salomon G. Control reconfigurability of linear time-invariant systems. Automatica, 2000, 36(11):1767-1771 doi: 10.1016/S0005-1098(00)00080-7 [6] 何国伟.中国航天工程可靠性理论研究成果综述.系统工程与电子技术, 1991, (1):1-20 http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD199101000.htmHe Guo-Wei. Progress in theoretical research on reliability for China's space engineering. Systems Engineering and Electronics, 1991, (1):1-20 http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD199101000.htm [7] Goble W M. Control System Safety Evaluation and Reliability (2nd edition). North Carolina:Instrument Society of America, 1998. [8] Iagnemma K D, Rzepniewski A, Dubowsky S, Pirjanian P, Huntsberger T L, Schenker P S. Mobile robot kinematic reconfigurability for rough terrain. In:Proceedings of the SPIE 4196, Sensor Fusion and Decentralized Control in Robotic Systems Ⅲ. Boston, MA, USA:SPIE, 2000, 4196:413-420 [9] Lee G H. Reconfigurability consideration design of components and manufacturing systems. The International Journal of Advanced Manufacturing Technology, 1997, 13(5):376-386 doi: 10.1007/BF01178258 [10] Demestichas P, Vivier G, El-Khazen K, Theologou M. Evolution in wireless systems management concepts:from composite radio environments to reconfigurability. IEEE Communications Magazine, 2004, 42(5):90-98 doi: 10.1109/MCOM.2004.1299348 [11] Chaturvedi N A, McClamroch N H. Almost global attitude stabilization of an orbiting satellite including gravity gradient and control saturation effects. In:Proceedings of the 2006 American Control Conference. Minneapolis, MN, USA:IEEE, 2006. [12] Lim Y H, Ahn H S. Relative position keeping in satellite formation flying with input saturation. Journal of the Franklin Institute, 2014, 351(2):1112-1129 doi: 10.1016/j.jfranklin.2013.10.016 [13] 胡庆雷, 姜博严, 石忠.基于新型终端滑模的航天器执行器故障容错姿态控制.航空学报, 2014, 35(1):249-258 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201401026.htmHu Qing-Lei, Jiang Bo-Yan, Shi Zhong. Novel terminal sliding mode based fault tolerant attitude control for spacecraft under actuator faults. Acta Aeronautica et Astronautica Sinica, 2014, 35(1):249-258 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201401026.htm [14] 岳新成, 杨莹, 耿志勇.有限推力能量、燃料最优轨道转移控制.南京航空航天大学学报, 2009, 41(6):715-719 http://youxian.cnki.com.cn/yxdetail.aspx?filename=HEBX20171013002&dbname=CAPJ2015Yue Xin-Cheng, Yang Ying, Geng Zhi-Yong. Optimal control for minimizing energy or fuel in finite-thrust orbit transfer. Journal of Nanjing University of Aeronautics and Astronautics, 2009, 41(6):715-719 http://youxian.cnki.com.cn/yxdetail.aspx?filename=HEBX20171013002&dbname=CAPJ2015 [15] Zhang Y M, Jiang J. Issues on integration of fault diagnosis and reconfigurable control in active fault-tolerant control systems. IFAC Proceedings Volumes, 2006, 39(13):1437-1448 doi: 10.3182/20060829-4-CN-2909.00240 [16] Hamdaoui R, Abdelkrim M N. Conditions on diagnosis and accommodation delays for actuator fault recoverability. In:Proceedings of the 8th International Multi-Conference on Systems, Signals, and Devices (SSD). Sousse, Tunisia:IEEE, 2011. 1-6 [17] 蔡远文, 申功勋, 于小红.服务型航天器在轨机动窗口.北京航空航天大学学报, 2010, 36(6):663-666, 675 http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201006009.htmCai Yuan-Wen, Shen Gong-Xun, Yu Xiao-Hong. On orbital maneuver window for servicing spacecraft. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(6):663-666, 675 http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201006009.htm [18] Zhou J K, Hu Q L, Friswell M I. Decentralized finite time attitude synchronization control of satellite formation flying. Journal of Guidance, Control, and Dynamics, 2013, 36(1):185-195 doi: 10.2514/1.56740 [19] Hu Q L, Li B, Zhang A H. Robust finite-time control allocation in spacecraft attitude stabilization under actuator misalignment. Nonlinear Dynamics, 2013, 73(1-2):53-71 doi: 10.1007/s11071-013-0766-2 [20] Staroswiecki M. On reconfigurability with respect to actuator failures. In:Proceedings of the 15th Triennial World Congress. Barcelona, Spanish:IFAC, 2002. 775-780 [21] Du G X, Quan Q, Yang B X, Cai K Y. Controllability analysis for multirotor helicopter rotor degradation and failure. Journal of Guidance, Control, and Dynamics, 2015, 38(5):978-985 doi: 10.2514/1.G000731 [22] Xiao B, Hu Q L, Shi P. Attitude stabilization of spacecrafts under actuator saturation and partial loss of control effectiveness. IEEE Transactions on Control Systems Technology, 2013, 21(6):2251-2263 doi: 10.1109/TCST.2012.2236327 [23] 康宁. 航天测控优化调度模型及其拉格朗日松弛求解算法[博士学位论文], 国防科学技术大学, 中国, 2011. http://cdmd.cnki.com.cn/Article/CDMD-90002-1012020935.htmKang Ning. Optimal Scheduling Model of Space TT & C System and Its Lagrangean Relaxation Solution Algorithms[Ph. D. dissertation], National University of Defense Technology, China, 2011. http://cdmd.cnki.com.cn/Article/CDMD-90002-1012020935.htm [24] 霍星, 胡庆雷, 肖冰, 马广富.带有饱和受限的挠性卫星变结构姿态容错控制.控制理论与应用, 2011, 28(9):1063-1068 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201109004.htmHuo Xing, Hu Qing-Lei, Xiao Bing, Ma Guang-Fu. Variable-structure fault-tolerant attitude control for flexible satellite with input saturation. Control Theory and Applications, 2011, 28(9):1063-1068 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201109004.htm [25] Godard G, Kumar K D. Fault tolerant reconfigurable satellite formations using adaptive variable structure techniques. Journal of Guidance, Control, and Dynamics, 2010, 33(3):969-984 doi: 10.2514/1.38580 [26] Alwi H, Edwards C. Fault tolerant control using sliding modes with on-line control allocation. Automatica, 2008, 44(7):1859-1866 doi: 10.1016/j.automatica.2007.10.034 [27] 关守平, 杨飞生.面向重构目标的控制系统可重构性.信息与控制, 2010, 39(4):391-396 http://youxian.cnki.com.cn/yxdetail.aspx?filename=JSJJ2017092200H&dbname=CAPJ2015Guan Shou-Ping, Yang Fei-Sheng. Reconfiguration-goaloriented control system reconfigurability. Information and Control, 2010, 39(4):391-396 http://youxian.cnki.com.cn/yxdetail.aspx?filename=JSJJ2017092200H&dbname=CAPJ2015 [28] Sebek M, Bisiacco M, Fornasini E. Controllability and reconstructibility conditions for 2-D systems. IEEE Transactions on Automatic Control, 1988, 33(5):496-499 doi: 10.1109/9.1237 [29] Kaczorek T. Local controllability, reachability, and reconstructability of the general singular model of 2D systems. IEEE Transactions on Automatic Control, 1992, 37(10):1527-1530 doi: 10.1109/9.256375 [30] Gehin A L, Staroswiecki M. Reconfiguration analysis using generic component models. IEEE Transactions on Systems, Man, and Cybernetics, Part A:Systems and Humans, 2008, 38(3):575-583 doi: 10.1109/TSMCA.2008.918608 [31] 曾声奎, 赵廷弟, 张建国, 康锐.系统可靠性设计分析教程.北京:北京航空航天大学出版社, 2001.Zeng Sheng-Kui, Zhao Ting-Di, Zhang Jian-Guo, Kang Rui. Design and Analysis of System Reliability. Beijing:Beijing University of Aeronautics and Astronautics Press, 2001. [32] Vey D, Lunze J. Structural reconfigurability analysis of multirotor UAVs after actuator failures. In:Proceedings of the 54th Annual Conference on Decision and Control (CDC). Osaka, Japan:IEEE, 2015. 5097-5104 [33] Xu H Y, Wang D Y, Li W B. A reconfigurability evaluation method for satellite control system. Proceedings of the 2015 Chinese Intelligent Systems Conference. Berlin, Heidelberg:Springer, 2016. [34] 杜光勋, 全权.输入受限系统的可控度及其在飞行控制中的应用.系统科学与数学, 2014, 34(12):1578-1594 http://www.cnki.com.cn/Article/CJFDTOTAL-STYS201412015.htmDu Guang-Xun, Quan Quan. Degree of controllability and ITS application in aircraft flight control. Journal of Systems Science and Mathematical Sciences, 2014, 34(12):1578-1594 http://www.cnki.com.cn/Article/CJFDTOTAL-STYS201412015.htm [35] Kalman R E, Ho Y C, Narendra K S. Controllability of linear dynamical systems. Contributions to Differential Equations, 1962, 37(3):189-213 http://wydawnictwa.ptm.org.pl/index.php/matematyka-stosowana/article/view/1502/1427 [36] Johnson C D. Optimization of a certain quality of complete controllability and observability for linear dynamical systems. Journal of Basic Engineering, 1969, 91(2):228-237 doi: 10.1115/1.3571074 [37] Müller P C, Weber H I. Analysis and optimization of certain qualities of controllability and observability for linear dynamical systems. Automatica, 1972, 8(3):237-246 doi: 10.1016/0005-1098(72)90044-1 [38] 张明涛, 安锦文.控制面故障下的飞机运动建模与重构控制能力分析及设计.信息与控制, 2010, 39(5):588-595 http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201005016.htmZhang Ming-Tao, An Jin-Wen. Aircraft movement modelling under control surface failure and analysis and design of reconfigurable flight control. Information and Control, 2010, 39(5):588-595 http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201005016.htm [39] Moore B C. Principal component analysis in linear systems:controllability, observability, and model reduction. IEEE Transactions on Automatic Control, 1981, 26(1):17 -32 doi: 10.1109/TAC.1981.1102568 [40] Zhou K, Salomon G, Wu N E. Balanced realization and model reduction for unstable systems. International Journal of Robust and Nonlinear Control, 1999, 9(3):183-198 doi: 10.1002/(ISSN)1099-1239 [41] Huang J Z, Wu N E. Fault-tolerant placement of phasor measurement units based on control reconfigurability. Control Engineering Practice, 2013, 21(1):1-11 doi: 10.1016/j.conengprac.2012.09.001 [42] Huang J Z, Wu N E. Fault-tolerant sensor placement based on control reconfigurability. IFAC Proceedings Volumes, 2011, 44(1):14814-14819 doi: 10.3182/20110828-6-IT-1002.01748 [43] Qin Q, Wu N E. Control reconfigurability-based placement strategy for FACTS devices. In:Proceedings of the 2013 American Control Conference. Washington DC, USA:IEEE, 2013. 5056-5061 [44] Shaker H R. Frequency-interval control reconfigurability for automated processes. Natural Hazards, 2014, 72(2):1021-1027 doi: 10.1007/s11069-014-1050-6 [45] González-Contreras B M, Theilliol D, Sauter D. On-line reconfigurability evaluation for actuator faults using input/output data. IFAC Proceedings Volumes, 2009, 42(8):674-679 doi: 10.3182/20090630-4-ES-2003.00112 [46] González-Contreras B M, Checa N D, Aguilar M A C, Michcol B C, Lopez P E M. Using a realization technique for system reconfigurability evaluation:simulation application on a DC motor. In:Proceedings of the 2011 IEEE Electronics, Robotics, and Automotive Mechanics Conference (CERMA). Cuernavaca, Morelos, Mexico:IEEE, 2011. 277-282 [47] Hadman A M A, Nayfeh A H. Measures of modal controllability and observability for first-and second-order linear systems. Journal of Guidance, Control, and Dynamics, 1989, 12(3):421-428 doi: 10.2514/3.20424 [48] 郑大钟.线性控制理论.北京:清华大学出版社, 2002.Zheng Da-Zhong. Linear System Theory. Beijing:Tsinghua University Press, 2002. [49] Viswanathan C N, Longman R W, Likins P W. A definition of the degree of controllability-a criterion for actuator placement. In:Proceedings of the 2nd Symposium on Dynamics and Control of Large Flexible Spacecraft. Blacksburg, VA, USA:NASA, 1979. 369-381 [50] Lindberg Jr R, Longman R. Optimization of actuator placement via degree of controllability criteria including spillover considerations. In:Proceedings of the 1982 AIAA/AAS Astrodynamics Conference, Guidance, Navigation, and Control and Co-located Conferences. San Diego, CA, USA:AIAA, 1982. 82-1435 [51] Viswanathan C N, Longman R W. The determination of the degree of controllability for dynamic systems with repeated eigenvalues. Engineering Science and Mechanics, 1983, 1091-1111 doi: 10.1007/978-1-4757-1895-9_21 [52] Schmitendorf W E. An exact expression for computing the degree of controllability. Journal of Guidance, Control, and Dynamics, 1984, 7(4):502-504 doi: 10.2514/3.19886 [53] 张平, 陈宗基.非线性飞控系统的控制可重构性.飞机设计, 2001, (3):12-15, 21 http://www.cnki.com.cn/Article/CJFDTOTAL-FJSJ200103002.htmZhang Ping, Chen Zong-Ji. Control reconfiguration of nonlinear flight control systems. Aircraft Design, 2001, (3):12 -15, 21 http://www.cnki.com.cn/Article/CJFDTOTAL-FJSJ200103002.htm [54] Yang Z Y. Reconfigurability analysis for a class of linear hybrid systems. In:Proceedings of the 6th IFAC Symposium on Fault Detection, Supervision, and Safety of Technical Processes. Beijing, China:IFAC, 2006. 974-979 [55] Yang H, Jiang B, Marcel S. On fault recoverability of a class of switched systems. In:Proceedings of the 29th Chinese Control Conference (CCC). Beijing, China:IEEE, 2010. 4052-4056 [56] Yang H, Jiang B, Staroswiecki M. Fault recoverability analysis of switched systems. International Journal of Systems Science, 2012, 43(3):535-542 doi: 10.1080/00207721.2010.517861 [57] Ren W J, Yang H, Jiang B, Staroswiecki M. Fault recoverability analysis of switched nonlinear systems. International Journal of Systems Science, 2017, 48(3):471-484 doi: 10.1080/00207721.2016.1186246 [58] Jiang Z P, Wang Y. A generalization of the nonlinear smallgain theorem for large-scale complex systems. In:Proceedings of the 7th World Congress on Intelligent Control and Automation. Chongqing, China:IEEE, 2008. 1188-1193 [59] Liu T F, Hill D J, Jiang Z P. Lyapunov formulation of ISS cyclic-small-gain in continuous-time dynamical networks. Automatica, 2011, 47(9):2088-2093 doi: 10.1016/j.automatica.2011.06.018 [60] Yang H, Jiang B, Staroswiecki M, Zhang Y M. Fault recoverability and fault tolerant control for a class of interconnected nonlinear systems. Automatica, 2015, 54:49-55 doi: 10.1016/j.automatica.2015.01.037 [61] Tabatabaeipour S M, Gholami M, Bak T. Reconfigurability of piecewise affine systems against actuator faults. In:Proceedings of the 18th IFAC World Congress. Milano, Italy:IFAC, 2011. 4672-4677 [62] Richter J H, Heemels W P M H, van de Wouw N, Lunze J. Reconfigurable control of piecewise affine systems with actuator and sensor faults:stability and tracking. Automatica, 2011, 47(4):678-691 doi: 10.1016/j.automatica.2011.01.048 [63] Yang Z, Hua S, Qiu H Z, Liu C R. Control reconfigurability of nonlinear system based on control redundancy. In:Proceedings of the 10th IEEE International Conference on Industrial Informatics (INDIN). Beijing, China:IEEE, 2012. 815-820 [64] Shaker H R. Control reconfigurability of bilinear systems. Journal of Mechanical Science and Technology, 2013, 27(4):1117-1123 doi: 10.1007/s12206-013-0216-6 [65] Shaker H R, Tahavori M. Control reconfigurability of bilinear hydraulic drive systems. In:Proceedings of the 2011 International Conference on Fluid Power and Mechatronics (FPM). Beijing, China:IEEE, 2011. 477-480 [66] Shaker H R, Shaker F. Control configuration selection for linear stochastic systems. Journal of Process Control, 2014, 24(1):146-151 doi: 10.1016/j.jprocont.2013.11.008 [67] Shaker H R. Fault recoverability analysis via crossGramian. Mechatronics and Robotics Engineering for Advanced and Intelligent Manufacturing. Berlin:Springer, 2017. 377-386 [68] Shaker H R. Generalized cross-Gramian for linear systems. In:Proceedings of the 7th IEEE Conference on Industrial Electronics and Applications (ICIEA). Singapore, Singapore:IEEE, 2012. 749-751 [69] Cheng Y H, Jiang B, Ma Y J, Qi H M, Liu C R. Reconfiguration analysis for satellite attitude control system with double faults. In:Proceedings of the 10th IEEE International Conference on Control and Automation (ICCA). Hangzhou, China:IEEE, 2013. 83-88 [70] 樊雯, 程月华, 姜斌, 刘文静.卫星姿态控制系统的可重构性分析.宇航学报, 2014, 35(2):185-191 http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201402010.htmFan Wen, Cheng Yue-Hua, Jiang Bin, Liu Wen-Jing. Reconfigurability analysis for satellite attitude control systems. Journal of Astronautics, 2014, 35(2):185-191 http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201402010.htm [71] 徐赫屿, 王大轶, 李文博.卫星姿态控制系统的可重构性量化评价方法研究.航天控制, 2016, 34(4):29-35 http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201604005.htmXu He-Yu, Wang Da-Yi, Li Wen-Bo. A reconfigurability evaluation method for satellite control system based on Gramian Matrix. Aerospace Control, 2016, 34(4):29-35 http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201604005.htm [72] Yang H, Jiang B, Gong H. Fault recoverability of switched systems with application to longitudinal flight process. In:Proceedings of the 2010 AIAA Guidance, Navigation, and Control Conference. Toronto, Canada:AIAA, 2010. [73] Brammer R F. Controllability in linear autonomous systems with positive controllers. SIAM Journal on Control, 1972, 10(2):339-353 doi: 10.1137/0310026 [74] Hoblos G, Staroswiecki M, Aitouche A. Fault tolerance with respect to actuator failures in LTI system. In:Proceedings of the 2000 Fault Detection, Supervision, and Safety for Technical Processes of the 4th IFAC Symposium. Budapest, Hungary:IFAC, 2000. [75] Staroswiecki M, Cazaurang F. Fault recovery by nominal trajectory tracking. In:Proceedings of the 2008 American Control Conference. Seattle, WA, USA:IEEE, 2008. 1070-1075 [76] Hamdaoui R, Abdelkrim M N. Timely actuator fault diagnosis and accommodation. In:Proceedings of the 10th International Multi-Conference on Systems, Signals and Devices (SSD). Hammamet, Tunisia:IEEE, 2013. 1-8 [77] 胡志坤, 孙岩, 姜斌, 何静, 张昌凡.一种基于最优未知输入观测器的故障诊断方法.自动化学报, 2013, 39(8):1225-1230 http://www.aas.net.cn/CN/abstract/abstract18153.shtmlHu Zhi-Kun, Sun Yan, Jiang Bin, He Jing, Zhang ChangFan. An optimal unknown input observer based fault diagnosis method. Acta Automatica Sinica, 2013, 39(8):1225 -1230 http://www.aas.net.cn/CN/abstract/abstract18153.shtml [78] Khelassi A, Theilliol D, Weber P. On reconfigurability for actuator faults under reliability constraints. IFAC Proceedings Volumes, 2009, 42(23):106-111 doi: 10.3182/20091014-3-CL-4011.00020 [79] Khelassi A, Theilliol D, Weber P. Reconfigurability analysis for reliable fault-tolerant control design. International Journal of Applied Mathematics and Computer Science, 2011, 21(3):431-439 https://mathscinet.ams.org/mathscinet-getitem?mr=2883887 [80] Blanke M, Kinnaert M, Lunze J, Staroswiecki M. Diagnosis and Fault-Tolerant Control. Berlin Heidelberg:Springer, 2016. 343-387 [81] Ren W J, Yang H, Jiang B. Fault recoverability analysis of nonlinear systems:a piecewise affine system approach. In:Proceedings of the 27th Chinese Control and Decision Conference (CCDC). Qingdao, China:CCDC, 2015. 1682 -1687 [82] 胡宇桑, 王大轶, 刘成瑞.基于能耗与可靠性约束的动量轮可重构性评价.中国空间科学技术, 2014, 34(5):10-17 doi: 10.3780/j.issn.1000-758X.2014.05.002Hu Yu-Sang, Wang Da-Yi, Liu Cheng-Rui. Reconfigurability evaluation of momentum wheel control system under energy and reliability constraints. Chinese Space Science and Technology, 2014, 34(5):10-17 doi: 10.3780/j.issn.1000-758X.2014.05.002 [83] Liu C R, Wang D Y. Reconfigurability design for spacecraft control system based on reliability constraint. In:Proceedings of the 33rd Chinese Control Conference (CCC). Nanjing, China:IEEE, 2014. 3328-3333 [84] 胡宇桑, 王大轶, 刘成瑞.卫星姿控系统可重构性综合评价方法研究.宇航学报, 2015, 36(5):549-556 http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201505011.htmHu Yu-Sang, Wang Da-Yi, Liu Cheng-Rui. Reconfigurability comprehensive evaluation for satellite attitude control system. Journal of Astronautics, 2015, 36(5):549-556 http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201505011.htm [85] Wu N E, Busch T. Operational reconfigurability in command and control. In:Proceedings of the 2004 American Control Conference. Boston, MA, USA:IEEE, 2004, 5:4426-4431 [86] Gehin A L, Staroswiecki M. A formal approach to reconfigurability analysis application to the three tank benchmark. In:Proceedings of the 1999 European Control Conference (ECC). Karlsruhe, USA:IEEE, 1999. 4041-4046 [87] Izadi-Zamanabadi R, Staroswiecki M. A structural analysis method formulation for fault-tolerant control system design. In:Proceedings of the 39th IEEE Conference on Decision and Control. Sydney, NSW, Australia:IEEE, 2000, 5:4901-4902 [88] Staroswiecki M. Observability and the design of fault tolerant estimation using structural analysis. Advances in Control Theory and Applications. Berlin Heidelberg:Springer, 2007. 257-278 [89] 段文杰, 王大轶, 刘成瑞.一种线性系统可重构控制分析方法.自动化学报, 2014, 40(12):2726-2736 http://www.aas.net.cn/CN/abstract/abstract18552.shtmlDuan Wen-Jie, Wang Da-Yi, Liu Cheng-Rui. An analysis method for reconfigurable control of linear systems. Acta Automatica Sinica, 2014, 40(12):2726-2736 http://www.aas.net.cn/CN/abstract/abstract18552.shtml [90] Gehin A L, Hu H X, Bayart M. A self-updating model for analysing system reconfigurability. Engineering Applications of Artificial Intelligence, 2012, 25(1):20-30 doi: 10.1016/j.engappai.2011.08.001 [91] Loureiro R, Merzouki R, Bouamama B O. Bond graph model based on structural diagnosability and recoverability analysis:application to intelligent autonomous vehicles. IEEE Transactions on Vehicular Technology, 2012, 61(3):986-997 doi: 10.1109/TVT.2012.2186472 [92] Loureiro R, Merzouki R. Structural reconfiguration conditions based on bond graph approach:application to an intelligent autonomous vehicle. In:Proceedings of the 8th IFAC Symposlum on Fault Detection, Supervision, and Safety of Technical Processes. Mexico City, Mexico, Spain:IFAC, 2012. 970-975 [93] Staroswiecki M. On reconfiguration-based fault tolerance. In:Proceedings of the 18th Mediterranean Conference on Control and Automation (MED). Marrakech, Morocco:IEEE, 2010. 1681-1691 [94] Abdesselam I, Haffaf H. Hypergraph reconfigurability analysis. IERI Procedia, 2014, 6(6):22-32 https://core.ac.uk/download/pdf/82370228.pdf [95] Qi H M, Cheng Y H, Jiang B, Ma Y J, Liu C R. Reconfigurability analysis for redundant momentums control systems with single fault. In:Proceedings of the 25th Chinese Control and Decision Conference (CCDC). Guiyang, China:IEEE, 2013. 4898-4903 [96] 祁海铭, 程月华, 姜斌, 贺亮.功能模块故障下的卫星姿态控制系统硬件可重构性.航天控制, 2014, 32(4):62-68 http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201404011.htmQi Hai-Ming, Cheng Yue-Hua, Jiang Bin, He Liang. Hardware reconfigurability of satellite attitude control system with function module faults. Aerospace Control, 2014, 32(4):62-68 http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201404011.htm [97] Wang D Y, Liu C R. Reconfigurability analysis method for spacecraft autonomous control. Mathematical Problems in Engineering, 2014, 2014:Article No. 724235 http://www.hindawi.com/journals/mpe/2014/724235/citations/ [98] Schneider H. Failure mode and effect analysis:FMEA from theory to execution. Technometrics, 1996, 38(1):80-80 http://www.doc88.com/p-2741545706179.html [99] Xu K, Tang L C, Xie M, Ho S L, Zhu M L. Fuzzy assessment of FMEA for engine systems. Reliability Engineering and System Safety, 2002, 75(1):17-29 doi: 10.1016/S0951-8320(01)00101-6 [100] 王世新. 卫星姿态控制系统可重构性设计研究[博士学位论文], 中国空间技术研究院, 中国, 2015. http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201604005.htmWang Shi-Xin. Research on Reconfigurability Design for Satellite Attitude Control System[Ph. D. dissertation], China Academy of Space Technology, China, 2015. http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201604005.htm [101] Ferguson S, Lewis K. Investigating the interaction between reconfigurability and system mass using multidisciplinary design optimization. In:Proceedings of the 49th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Schaumburg, IL, USA:AIAA, 2008. [102] Tabatabaeipour S M, Gholami M, Bak T. Configuration selection for reconfigurable control of piecewise affine systems. International Journal of Control, 2015, 88(6):1310-1323 doi: 10.1080/00207179.2015.1006684 [103] 王世新, 邢琰, 王大轶, 刘成瑞.基于能耗最优的卫星姿控系统推力器可重构性设计.航天控制, 2015, 33(5):46-53 http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201505011.htmWang Shi-Xin, Xing Yan, Wang Da-Yi, Liu Cheng-Rui. Reconfigurability design for thrusters of satellite attitude control system based on optimal energy consumption. Aerospace Control, 2015, 33(5):46-53 http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201505011.htm [104] 苏为华. 多指标综合评价理论与方法问题研究[博士学位论文], 厦门大学, 中国, 2000. http://cdmd.cnki.com.cn/Article/CDMD-10384-2002051199.htmSu Wei-Hua. Research on Comprehensive Evaluation Theories and Methods with Multiple Indicators[Ph. D. dissertation], Xiamen University, China, 2000. http://cdmd.cnki.com.cn/Article/CDMD-10384-2002051199.htm [105] 徐泽水, 达庆利.多属性决策的组合赋权方法研究.中国管理科学, 2002, 10(2):84-87 http://cdmd.cnki.com.cn/Article/CDMD-10674-2001002703.htmXu Ze-Shui, Da Qing-Li. Study on method of combination weighting. Chinese Journal of Management Science, 2002, 10(2):84-87 http://cdmd.cnki.com.cn/Article/CDMD-10674-2001002703.htm [106] 顾朋, 王大轶, 刘成瑞.零动量卫星轮控系统可重构性设计研究.中国空间科学技术, 2013, 33(1):7-14 doi: 10.3780/j.issn.1000-758X.2013.01.002Gu Peng, Wang Da-Yi, Liu Cheng-Rui. Research on momentum wheel reconfiguration design of zero-momentum satellite. Chinese Space Science and Technology, 2013, 33(1):7-14 doi: 10.3780/j.issn.1000-758X.2013.01.002 [107] 项昌毅, 杨浩, 程月华, 姜斌, 刘成瑞.卫星姿态控制系统的可重构性指标分配.航天控制, 2014, 32(2):46-52, 59 http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201402009.htmXiang Chang-Yi, Yang Hao, Cheng Yue-Hua, Jiang Bin, Liu Cheng-Rui. Reconfigurable allocation of satellite attitude control system. Aerospace Control, 2014, 32(2):46-52, 59 http://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ201402009.htm [108] Xiang C Y, Yang H, Cheng Y H, Jiang B. Reconfiguration allocation of satellite attitude control systems. In:Proceedings of the 25th Chinese Control and Decision Conference (CCDC). Guiyang, China:IEEE, 2013. 4101-4105 [109] 项昌毅, 杨浩, 程月华, 姜斌, 刘成瑞.基于启发式算法的可重构性指标分配.空间控制技术与应用, 2013, 39(5):7-12 http://www.cnki.com.cn/Article/CJFDTOTAL-KJKZ201305002.htmXiang Chang-Yi, Yang Hao, Cheng Yue-Hua, Jiang Bin, Liu Cheng-Rui. On heuristic algorithm for reconfigurability allocation. Aerospace Control and Application, 2013, 39(5):7-12 http://www.cnki.com.cn/Article/CJFDTOTAL-KJKZ201305002.htm [110] Wang D Y, Duan W J, Liu C R. An analysis method for control reconfigurability of linear systems. Advances in Space Research, 2016, 57(1):329-339 doi: 10.1016/j.asr.2015.08.028 [111] Zhang Y M, Jiang J. Bibliographical review on reconfigurable fault-tolerant control systems. Annual Reviews in Control, 2008, 32(2):229-252 doi: 10.1016/j.arcontrol.2008.03.008 [112] 王敏. 动态系统执行器故障的主动容错控制研究[博士学位论文], 清华大学, 中国, 2007. http://cdmd.cnki.com.cn/Article/CDMD-10003-2009055458.htmWang Min. Active Fault Tolerant Control of Dynamic Systems with Actuator Faults[Ph. D. dissertation], Tsinghua University, China, 2007. http://cdmd.cnki.com.cn/Article/CDMD-10003-2009055458.htm [113] Nijmeijer H. Controllability and observability of nonlinear systems. Control and Optimal Control Theories with Applications, 2004, 66(12):149-170 doi: 10.1007/978-0-8176-4733-9_6 -

 下载:
下载:

图(2) / 表(2)
计量
- 文章访问数: 3786
- HTML全文浏览量: 515
- PDF下载量: 975
- 被引次数: 0
