

Adaptive Robust Anti-interference Control and Vibration Suppression for an Elastic-base Elastic-joint Space Robot
-
摘要: 研究不确定弹性基和弹性关节空间机器人的抗扰运动控制及基座和关节弹性振动同步抑制问题.在对基座和关节弹性进行等效线性弹簧假设的基础上,建立了弹性基和弹性关节空间机器人的动力学方程,并推导了基于等效刚度思想的奇异摄动慢、快变子系统.对传统参数自适应控制律进行σ修正并与鲁棒抗扰控制相结合,对不确定参数和有界外部扰动影响下的慢变子系统提出了基座姿态和臂杆关节刚性运动轨迹跟踪的改进自适应鲁棒抗扰控制方案.使用高增益线性状态观测器对快变高阶量进行实时观测,针对快变子系统设计了基座和关节弹性振动同步抑制的改进最优控制方案.仿真示例分析,表明了所提混合控制方案在空间机器人抗扰运动控制及振动抑制上的有效性.Abstract: Anti-interference motion control and elastic vibration synchronous suppression of base and joints for an elastic-base elastic-joint space robot with uncertainties are studied. On the basis of equivalent linear spring assumptions about the elastic base and joints, the dynamic equations of the space robot are established, then both singular perturbation slow and fast subsystems are deduced with the equivalent stiffness concept. The traditional parameter adaptive control law is improved by using σ modification, and is then combined with the robust anti-interference control. An improved singular perturbation adaptive robust anti-interference control scheme is proposed for the slow subsystem to track the rigid motion trajectories of the base's attitude and links' joints subject to uncertain parameters and bounded external disturbances. A high-gain linear state observer is employed to measure the fast higher-order states in real time, and an improved optimal control method is designed for the fast subsystem to synchronously suppress the elastic vibrations of the base and joints. Simulation result demonstrates the validity of the presented hybrid control scheme in anti-interference motion control and vibration suppression of the space robot.
-
Key words:
- Space robot /
- elastic-base /
- elastic-joint /
- anti-interference control /
- vibration suppression
-
为满足日益增长的未来空间探索需求, 人们对空间机器人提出了更高的操控精度要求.而为了确保此类系统能够具备预期的轨迹跟踪性能, 空间机器人动力学的非线性、强耦合性及相关控制问题必须予以重视.近些年, 随着空间机器人研究工作的不断深入, 刚性模型假设下的空间机器人各类研究已相对成熟, 且所得成果已可较好解决包括系统动力学建模、运动规划和轨迹跟踪在内的各种问题[1-4].然而, 现有的空间机器人实属一种典型的弹性多体系统, 其系统关节和基座均可能会出现弹性振动现象, 例如驱动机器人臂杆运动的关节装置会因制造、谐波减速等原因而呈弹性[5]; 安装有作业臂的浮动基座导轨会因载体与作业臂的动力学耦合作用而出现弹性振动等.由于这些弹性振动在无阻尼太空环境下容易被激发且衰减非常缓慢, 因此必然会对空间机器人的实时操控精度产生不利影响.除臂杆柔性受到关注外[6-7], 目前空间机器人关节和基座所固有的弹性效应已逐渐引起人们的重视.
在考虑关节弹性方面, Nanos等[8]推导了弹性关节空间机械臂的动力学方程, 设计了一种具有较小计算量的静态反馈线性化控制方案, 实现了系统末端轨迹的精确跟踪; Ulrich等[9]在刚性关节空间机器人动力学模型的基础上, 对弹性关节空间机器人的动力学问题进行分析, 基于奇异摄动理论提出了一种模型参考自适应控制方案; Yang等[10]除对弹性关节空间机械臂进行动力学建模外, 还探究了系统的弹性振动属性; 陈志勇等[11]研究了姿态受控弹性关节双臂空间机器人双臂关节运动的奇异摄动抗力矩饱和控制及关节弹性振动抑制问题.在考虑基座弹性方面, Meng等[12]对自主目标抓取的柔性基空间机器人的运动学进行分析, 推导出可表征系统基座速度、关节速率、弹性运动到末端速度映射关系的运动学方程, 并以此为基础提出了一种带有振动补偿的分解运动速度控制方案; 元波等[13]讨论了参数确定工况下弹性基刚性空间机械臂的动力学建模、惯性空间计算力矩控制及基座弹性振动抑制的最优控制问题.
需要强调, 上述研究要么仅考虑关节弹性, 要么仅关注基座弹性; 且相比关节弹性研究, 目前基座弹性研究所受的关注度偏低, 而同步解决关节和基座双重弹性问题的空间机器人研究更是鲜见报导.可见, 继续探讨基座和关节弹性共同影响下空间机器人的动力学与控制问题, 对于巩固和完善现有空间机器人研究成果具有重要的现实意义.相比于地面机器人[14-15]或以往仅考虑单一弹性的空间机器人, 兼顾基座弹性和关节弹性共同影响下空间机器人动力学控制问题的研究难度明显增大, 不仅要解决系统刚性运动轨迹的精确跟踪控制问题, 而且要同时处理基座和关节产生的双重弹性振动抑制问题.再者, 由于作业过程中载体控制燃料的消耗与晃动、目标载荷的抓取与释放以及太阳风等原因, 空间机器人不可避免将面临系统参数不确定和外部扰动并存的复杂工况[16], 上述复杂工况同样会给系统轨迹跟踪控制器的设计增加难度, 并使得现有许多传统参数自适应控制策略在此难以取得预期的控制效果.除此之外, 文献[9, 11, 13]为了抑制空间机器人产生的弹性振动, 所提方案需实时测量和反馈系统的弹性变形高阶量, 从而加大了方案的实现成本, 且极可能会因变形高阶量测量不精确而无法获得预期的抑振效果.
针对上述问题, 本文利用拉格朗日法建立了漂浮弹性基和弹性关节空间机器人的动力学微分方程, 并推导出基于等效刚度的系统慢、快变奇异摄动模型; 之后为消除包括不确定参数和有界外部扰动在内的系统不确定性影响, 针对慢变系统设计了基座姿态和臂杆关节轨迹跟踪的改进自适应鲁棒抗扰控制方案; 针对快变系统提出了基座和关节弹性振动同步抑制的高阶状态观测全局最优控制方案.仿真控制结果证实, 提出的混合控制方案具有较强的运动抗扰性及振动抑制能力, 可确保姿态受控漂浮弹性基和弹性关节空间机器人完成期望的关节空间任务.
1. 考虑外部扰动的弹性基和弹性关节空间机器人动力学模型
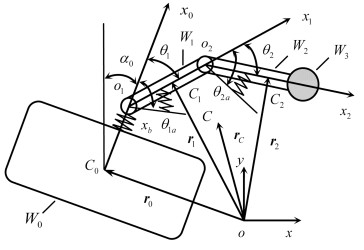
按照弹性基和弹性关节平面两杆空间机器人系统(如图 1所示), 建立其动力学模型.为便于后续讨论, 假设系统满足: 1)所处外层空间的微重力影响可忽略不计; 2)空间基座及机械臂各关节铰仅在一个方向上发生弹性变形, 且可分别等效为一个无惯量的线性伸缩弹簧及线性扭转弹簧模型[17]; 3)除空间基座及机械臂关节铰存在弹性外, 其余各构件均被视为刚性部件; 4)空间基座处于位置无控、姿态受主动控制状态, 各臂杆具有一个旋转自由度且受内部关节驱动电机的主动控制.
图 1中符号定义如下: $W_{0}$表示处于漂浮状态的空间基座, $W_{i}$ $(i=1, 2)$表示第$i$根刚性臂杆, $W_{3}$表示刚性负载; $\{oxy\}$为随系统运行轨道平动的惯性系, $\{o_{0}x_{0}y_{0}\}$为原点建立在基座$W_{0}$质心上的基座连动坐标系, $\{o_{i}x_{i}y_{i}\}$ $(i=1, 2)$为原点建立在关节$o_{i}$几何中心上的臂杆连动坐标系; $C_{0}$, $C_{1}$分别为载体基座$W_{0}$和前杆$W_{1}$的质心, 它们在惯性系$\{oxy\}$中的位置矢量为$\pmb{r}_{0}$, $\pmb{r}_{1}$; $C_{2}$, $C$分别为末杆$W_{2}$与负载$W_{3}$组合体和整个机器人的总质心, 它们在惯性系$\{oxy\}$中的位置矢量为$\pmb{r}_{2}$, $\pmb{r}_{C}$; $\alpha_{0}$为惯性系$\{oxy\}$中$y$轴到基座连动坐标系$\{o_{0}x_{0}y_{0}\}$中$x_{0}$轴的转角(称为基座姿态角), $\theta_{i}$ $(i=1, 2)$为$\{o_{i-1}x_{i-1}y_{i-1}\}$中$x_{i-1}$轴到$\{o_{i}x_{i}y_{i}\}$中$x_{i}$轴的转角(称为刚性杆$i$的连杆转角); $x_{b}$为空间基座在$x_{0}$轴方向上的弹性位移, $\theta_{ia}$ $(i=1, 2)$为位于关节$o_{i}$处的驱动电机转角.
根据图 1中位置矢量间的几何关系及系统线动量守恒原理, 可算出弹性基和弹性关节空间机器人的总动能$T$和总势能$U$, 进而求得Lagrange函数$L$ $=T-U$.利用拉格朗日建模法, 可推导出基座姿态受主动控制情况下, 带有外部扰动的系统动力学微分方程.
$ \begin{array}{l} \left[ {\begin{array}{*{20}{c}} {D(\mathit{\boldsymbol{q}})}&{{{\bf{0}}_{4 \times 2}}}\\ {{{\bf{0}}_{2 \times 4}}}&{{J_a}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\mathit{\boldsymbol{\ddot q}}}\\ {{{\mathit{\boldsymbol{\ddot \theta }}}_a}} \end{array}} \right] + \left[ {\begin{array}{*{20}{c}} {H(\mathit{\boldsymbol{q}}, \mathit{\boldsymbol{\dot q}})\mathit{\boldsymbol{\dot q}}}\\ {{K_a}{\mathit{\boldsymbol{\delta }}_a}} \end{array}} \right] - \\ \;\;\;\;\;\;\;\;\;\;\;\;{\mkern 1mu} \left[ {\begin{array}{*{20}{c}} 0\\ {{\mathit{\boldsymbol{\tau }}_d}}\\ {{{\bf{0}}_{2 \times 1}}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} { - {k_0}{x_b}}\\ {{\tau _0}}\\ {{K_a}{\mathit{\boldsymbol{\delta }}_a}}\\ {{\mathit{\boldsymbol{\tau }}_a}} \end{array}} \right] \end{array} $
(1) 其中, $D(\pmb{q})\in {{\bf{R}}^{4\times4}}$为具有对称、正定性的空间机器人惯性阵, $J_{a}={\rm {diag}}\{J_{1a}, J_{2a}\}$为关节电机的转动惯量阵, $J_{ia}$ $(i=1, 2)$为第$i$个关节的转动惯量; $H(\pmb{q}, \dot{\pmb{q}})\in {{\bf{R}}^{4\times4}}$为从空间机器人科氏力和离心力列向量中分离出来且由Christoffel符号定义得到的矩阵[18]; $\pmb{q}=[x_{b}, \alpha_{0}, \pmb{\theta}^{\rm T}]^{\rm T}$, $\pmb{\theta}=[\theta_{1}, \theta_{2}]^{\rm T}$为臂杆转角列向量, $\pmb{\theta}_{a}=[\theta_{1a}, \theta_{2a}]^{\rm T}$为电机转角列向量; $K_{a}=$ ${\rm {diag}}\{k_{1a}, k_{2a}\}$为系统的关节扭转刚度阵, $k_{0}$, $k_{ia}$ $(i$ $=$ $1, 2)$分别为空间基座的线性伸缩刚度及第$i$个关节的线性扭转刚度; $\pmb{\delta}_{a}=\pmb{\theta}_{a}-\pmb{\theta}=[\delta_{1}, \delta_{2}]^{\rm T}$为关节的弹性变形量, $\delta_{i}=\theta_{ia}-\theta_{i}$ $(i=1, 2)$; $\tau_{0}$为基座姿态的主动控制力矩, $\pmb{\tau}_{a}\in {{\bf{R}}^{2}}$为关节电机的主动控制力矩列向量, $\pmb{\tau}_{d}\in {{\bf{R}}^{3}}$为系统有界、连续的外部扰动.
性质1. 动力学方程式(1)中的前四个子式左端前两项可进一步分解成
$ D(\pmb{q})\ddot{\pmb{q}}+H(\pmb{q}, \dot{\pmb{q}})\dot{\pmb{q}}= Y_{q}(\pmb{q}, \dot{\pmb{q}}, \ddot{\pmb{q}})\pmb{\varphi} $
(2) 其中, $Y_{q}(\pmb{q}, \dot{\pmb{q}}, \ddot{\pmb{q}})\in{{\bf{R}}^{4\times10}}$为提取系统组合惯性参数$\pmb{\varphi}$ $\in$${{\bf{R}}^{10}}$后得到的回归矩阵, $\pmb{\varphi}$各子元素见附录A.
性质2. 对于任意选取的列向量$\pmb{z}\in {{\bf{R}}^{4}}$, 矩阵$D(\pmb{q})$与$H(\pmb{q}, \dot{\pmb{q}})$恒满足
$ \pmb{z}^{\rm T}\dot{D}(\pmb{q})\pmb{z}=2\pmb{z}^{\rm T}H(\pmb{q}, \dot{\pmb{q}})\pmb{z} $
(3) 2. 混合控制方案的设计
不确定弹性基和弹性关节空间机器人的控制目标是: 1)确保不确定系统刚性运动轨迹的精确跟踪; 2)抑制系统基座和关节产生的双重弹性振动.而为了实现上述目标, 本文借鉴奇异摄动控制技术来完成控制方案设计, 大致思路如下:通过柔性补偿控制设计来等效提高空间机器人关节刚度, 以克服系统因关节刚度偏小而难以直接使用奇异摄动控制技术这一问题, 并推导出系统在等效刚度下的奇异摄动慢、快变模型表达; 既然所得慢、快变子系统在时间尺度上具有足够大的差别, 因此可分别在两个不同的时间尺度下对上述两个子系统进行独立控制器的设计; 为此, 在考虑系统不确定影响下, 针对慢变子系统提出一种用于系统刚性轨迹跟踪的改进自适应鲁棒抗扰慢变控制方案, 针对快变子系统设计一种用于系统弹性振动抑制且基于状态观测器的改进最优快变控制修正项; 综合上述两个子控制方案, 最终获得一种弹性基和弹性关节空间机器人的混合控制方案.
2.1 等效刚度下的奇异摄动表达
令$D={bmatrix}D_{ff}&\pmb{D}_{fr}\\\pmb{D}_{rf}&D_{rr}{bmatrix}$, $H={bmatrix}H_{ff}&\pmb{H}_{fr}\\\pmb{H}_{rf}&H_{rr}{bmatrix}$, 并定义新矩阵$N(\pmb{q})$如下:
$ N(\pmb{q})=D^{-1}=\begin{bmatrix}N_{ff}&\pmb{N}_{fr}\\\pmb{N}_{rf}&N_{rr}\end{bmatrix} $
(4) 其中, ${D_{ff}} \in {{\bf{R}}^{1 \times 1}}$, ${\mathit{\boldsymbol{D}}_{fr}} = \mathit{\boldsymbol{D}}_{rf}^{\rm{T}} \in {{\bf{R}}^{1 \times 3}}$, ${D_{rr}} \in {{\bf{R}}^{3 \times 3}}$, ${H_{ff}} \in {{\bf{R}}^{1 \times 1}}$, ${\mathit{\boldsymbol{H}}_{fr}} \in {{\bf{R}}^{1 \times 3}}$, ${\mathit{\boldsymbol{H}}_{rf}} \in {{\bf{R}}^{3 \times 1}}$, $H_{rr}$ $\in$ ${{\bf{R}}^{3 \times 3}}$, ${N_{ff}} \in {{\bf{R}}^{1 \times 1}}$, ${\mathit{\boldsymbol{N}}_{fr}} \in {{\bf{R}}^{1 \times 3}}$, ${\mathit{\boldsymbol{N}}_{rf}} \in {{\bf{R}}^{3 \times 1}}$, $N_{rr}$ $\in$ ${{\bf{R}}^{3 \times 3}}$.
将式(1)前四个子式所构成的方程左右两端同时左乘式(4)后, 分解整理得
$ \begin{array}{*{20}{l}} {{{\ddot x}_b} = - {N_{ff}}\left( {{H_{ff}}{{\dot x}_b} + {\mathit{\boldsymbol{H}}_{fr}}\left[ {\begin{array}{*{20}{c}} {{{\dot \alpha }_0}}\\ {\mathit{\boldsymbol{\dot \theta }}} \end{array}} \right]} \right) - }\\ {\;\;\;\;\;\;\;\;{\mathit{\boldsymbol{N}}_{fr}}\left( {{\mathit{\boldsymbol{H}}_{rf}}{{\dot x}_b} + {H_{rr}}\left[ {\begin{array}{*{20}{c}} {{{\dot \alpha }_0}}\\ {\mathit{\boldsymbol{\dot \theta }}} \end{array}} \right]} \right) - }\\ {\;\;\;\;\;\;\;\;{N_{ff}}{k_0}{x_b} + {\mathit{\boldsymbol{N}}_{fr}}\left( {\left[ {\begin{array}{*{20}{c}} {{\tau _0}}\\ {{K_a}{\mathit{\boldsymbol{\delta }}_a}} \end{array}} \right] + {\mathit{\boldsymbol{\tau }}_d}} \right)}\\ \end{array} $
(5) $ \begin{array}{l} \begin{array}{*{20}{l}} {\left[ {\begin{array}{*{20}{c}} {{{\ddot \alpha }_0}}\\ {\mathit{\boldsymbol{\ddot \theta }}} \end{array}} \right] = - {\mathit{\boldsymbol{N}}_{rf}}\left( {{H_{ff}}{{\dot x}_b} + {\mathit{\boldsymbol{H}}_{fr}}\left[ {\begin{array}{*{20}{c}} {{{\dot \alpha }_0}}\\ {\mathit{\boldsymbol{\dot \theta }}} \end{array}} \right]} \right) - }\\ {\;\;\;\;\;\;\;\;\;\;\;\;{N_{rr}}\left( {{\mathit{\boldsymbol{H}}_{rf}}{{\dot x}_b} + {H_{rr}}\left[ {\begin{array}{*{20}{c}} {{{\dot \alpha }_0}}\\ {\mathit{\boldsymbol{\dot \theta }}} \end{array}} \right]} \right) - }\\ {\;\;\;\;\;\;\;\;\;\;\;\;{\mathit{\boldsymbol{N}}_{rf}}{k_0}{x_b} + {N_{rr}}\left( {\left[ {\begin{array}{*{20}{c}} {{\tau _0}}\\ {{K_a}{\mathit{\boldsymbol{\delta }}_a}} \end{array}} \right] + {\mathit{\boldsymbol{\tau }}_d}} \right)} \end{array} \end{array} $
(6) 观察式(1)的后两个子式可知, 机器人关节柔性的存在相当于在关节驱动电机与被驱动臂杆间设置了一个力矩滤波器, 其滤波带宽随关节柔性增大而减小, 反之亦然.换言之, 若系统关节刚度较小, 则关节柔性动力学对系统刚性运动部分的影响就难以忽略.显然, 这一结果将大大降低传统奇异摄动控制技术的控制效果.为使奇异摄动法适于具有较小关节刚度柔性空间机器人控制器的设计, 此处引入对角、正定关节刚度调节阵$K_{e}\in {{\bf{R}}^{2\times2}}$, 并对式(1)后两个子式中的关节驱动律$\pmb{\tau}_{a}$做如下设计[19]:
$ \pmb{\tau}_{a}=(I+K_{e})\pmb{\tau}_{n}-K_{e}K_{a}\pmb{\delta}_{a} $
(7) 其中, $I\in{{\bf{R}}^{2\times2}}$为单位阵, $\pmb{\tau}_{n}\in {{\bf{R}}^{2}}$为后续拟继续设计的新控制量.需要指出, 式(7)右端第一项系数$I$ $+$ $K_{e}$用于调节力矩滤波器的低频增益, 右端第二项则用于实现系统关节柔性的等效补偿.
将式(7)代入式(1)的后两个子式, 整理得
$ \ddot{\pmb{\delta}}_{a}=-J^{-1}_{a}(I+K_{e})K_{a}\pmb{\delta}_{a}+J^{-1}_{a}(I+K_{e})\pmb{\tau}_{n}-\ddot{\pmb{\theta}} $
(8) 通过式(1)后两个子式和式(8)的对比可知, 经由式(7)设计后, 空间机器人关节刚度可被等效提高到$(I+K_{e})K_{a}$.
选取刚性转角$\alpha_{0}$, $\pmb{\theta}$作为系统的慢变量, 弹性变形$x_{b}$, $\pmb{\delta}_{a}$作为系统的快变量, 并定义奇异摄动系数$\mu$ $= 1/{\rm {min}}(k_{0}, k_{1a}, k_{2a})$, $\tilde{k}_{0}=\mu k_{0}$, $\tilde{K}_{a}=\mu K_{a}$, $\xi_{b}$ $=$ $x_{b}/\mu$, $\pmb{\xi}_{\delta}=\pmb{\delta}_{a}/\mu$.将上述定义代入式(5), (8)和(6), 并继续令$\mu\rightarrow 0$, 可导出表征弹性基和弹性关节空间机器人刚性运动的慢变子系统.
$ \bar{M}_{rr}\begin{bmatrix}\ddot{\alpha}_{0}\\\ddot{\pmb{\theta}} \end{bmatrix}+\bar{H}_{rr}\begin{bmatrix}\dot{\alpha}_{0}\\\dot{\pmb{\theta}} \end{bmatrix}=\begin{bmatrix}\tau_{0}\\\pmb{\tau}^{s}_{n} \end{bmatrix}+\pmb{\tau}_{d} $
(9) 及慢变量
$ \begin{array}{l} {{\bar \xi }_b} = \tilde k_0^{ - 1}\bar N_{ff}^{ - 1}\left\{ { - {{\bar N}_{ff}}{{\mathit{\boldsymbol{\overline H}} }_{fr}}\left[ {\begin{array}{*{20}{c}} {{{\dot \alpha }_0}}\\ {\mathit{\boldsymbol{\dot \theta }}} \end{array}} \right] - {{\mathit{\boldsymbol{\overline N}} }_{fr}}{{\bar H}_{rr}}\left[ {\begin{array}{*{20}{c}} {{{\dot \alpha }_0}}\\ {\mathit{\boldsymbol{\dot \theta }}} \end{array}} \right] + } \right.\\ \;\;\;\;\;\;\left. {{{\mathit{\boldsymbol{\overline N}} }_{fr}}\left[ {\begin{array}{*{20}{c}} {{\tau _0}}\\ {\mathit{\boldsymbol{\tau }}_n^s - {{(I + {K_e})}^{ - 1}}{J_a}\mathit{\boldsymbol{\ddot \theta }}} \end{array}} \right] + {{\mathit{\boldsymbol{\overline N}} }_{fr}}{\mathit{\boldsymbol{\tau }}_d}} \right\} \end{array} $
(10) $ {\mathit{\boldsymbol{\overline \xi }} _\delta } = \tilde K_a^{ - 1}\left[ {\mathit{\boldsymbol{\tau }}_n^s - {{(I + {K_e})}^{ - 1}}{J_a}\mathit{\boldsymbol{\ddot \theta }}} \right] $
(11) 其中, $\bar{M}_{rr}=\bar{D}_{rr}+{bmatrix}0&{{\bf{0}}_{1\times2}}\\{{\bf{0}}_{2\times1}}&(I+K_{e})^{-1}J_{a}{bmatrix}$, 符号$\bar{{\Xi}}$表示矩阵${\Xi}$的慢变状态, $\pmb{\tau}^{s}_{n}\in {{\bf{R}}^{2}}$为$\pmb{\tau}_{n}$的慢变控制分量, $\bar{M}_{rr}$与$\bar{H}_{rr}$之间仍满足系统的斜对称关系: $\pmb{z}^{\rm T}_{r}\dot{\bar{M}}_{rr}\pmb{z}_{r}$ $=2\pmb{z}^{\rm T}_{r}\bar{H}_{rr}\pmb{z}_{r}$, 且$\pmb{z}_{r}\in {{\bf{R}}^{3}}$为任选列向量.
设快变时标$t_{f}=t/\sqrt{\mu}$及新快变状态量$Z_{1}=$ $\xi_{b}$ $-$ $\bar{\xi}_{b}$, $\pmb{Z}_{2}=\pmb{\xi}_{\delta}-\bar{\pmb{\xi}}_{\delta}$, $Z_{3}=\sqrt{\mu}\dot{\xi}_{b}$, $\pmb{Z}_{4}=\sqrt{\mu}\dot{\pmb{\xi}}_{\delta}$.将上述定义代入式(5), (8), 并结合快、慢变时标的相互独立性, 得到可表征空间机器人基座、关节双重弹性振动的快变子系统.
$ \frac{{\rm d}\pmb{Z}_{f}}{{\rm d}t_{f}}=A_{f}\pmb{Z}_{f}+B_{f}\pmb{\tau}^{f}_{n} $
(12) 其中, $\pmb{Z}_{f}=[Z_{1}, \pmb{Z}^{\rm T}_{2}, Z_{3}, \pmb{Z}^{\rm T}_{4}]^{\rm T}$, $\bar{\pmb{N}}^{*}_{fr}$为向量$\bar{\pmb{N}}_{fr}$后两个元素所组成的行向量, 且$\pmb{\tau}^{f}_{n}\in {{\bf{R}}^{2}}$为$\pmb{\tau}_{n}$的快变控制分量, 且
$ \begin{array}{l} {A_f} = \left[ {\begin{array}{*{20}{c}} 0&{{{\bf{0}}_{1 \times 2}}}&1&{{{\bf{0}}_{1 \times 2}}}\\ {{{\bf{0}}_{2 \times 1}}}&{{{\bf{0}}_{2 \times 2}}}&{{{\bf{0}}_{2 \times 1}}}&{{I_{2 \times 2}}}\\ { - {{\bar N}_{ff}}{{\tilde k}_0}}&{\mathit{\boldsymbol{\overline N}} _{fr}^*{{\tilde K}_a}}&0&{{{\bf{0}}_{1 \times 2}}}\\ {{{\bf{0}}_{2 \times 1}}}&{ - J_a^{ - 1}(I + {K_e}){{\tilde K}_a}}&{{{\bf{0}}_{2 \times 1}}}&{{{\bf{0}}_{2 \times 2}}} \end{array}} \right]\\ {B_f} = \left[ {\begin{array}{*{20}{c}} {{{\bf{0}}_{1 \times 2}}}\\ {{{\bf{0}}_{2 \times 2}}}\\ {{{\bf{0}}_{1 \times 2}}}\\ {J_a^{ - 1}(I + {K_e})} \end{array}} \right] \end{array} $
2.2 轨迹跟踪的自适应鲁棒抗扰控制
如前所述, 空间机器人不可避免地会受到系统参数不确定和外部扰动的共同影响, 而选择传统参数自适应控制策略作为控制手段通常仅能较好地解决系统参数不确定问题.若不对上述控制策略加以改进而直接用于外部扰动影响下参数不确定空间机器人的控制, 实时估计参数往往会因受到外部扰动影响而容易出现漂移问题, 难以取得预期的控制效果.为此, 本节基于上节给出的奇异摄动慢变子系统式(9), 对传统自适应策略进行改进并附加设计鲁棒抗扰项来实现对不确定弹性基座和弹性关节空间机器人运动轨迹的精确跟踪控制[20-21].
将姿态受控弹性基和弹性关节空间机器人在关节空间的刚性运动函数设为$\bar{\pmb{q}}=[\alpha_{0}, \pmb{\theta}^{\rm T}]^{\rm T}$, 相应的二阶可导理想轨迹函数为$\bar{\pmb{q}}_{d}=[\alpha_{0d}, \pmb{\theta}^{\rm T}_{d}]^{\rm T}$, 且$\alpha_{0d}$为基座姿态期望函数, $\pmb{\theta}_{d}=[\theta_{1d}, \theta_{2d}]^{\rm T}$为臂杆转角期望列向量.于是, 系统的位置误差和速度误差可分别表示为$\pmb{e}=\bar{\pmb{q}}-\bar{\pmb{q}}_{d}$, $\dot{\pmb{e}}=\dot{\bar{\pmb{q}}}-\dot{\bar{\pmb{q}}}_{d}$.
定义系统扩展误差为$\dot{\pmb{s}}$, 辅控信号为$\dot{\pmb{\eta}}$
$ \mathit{\boldsymbol{\dot s}} = \mathit{\boldsymbol{\dot e}} + \Lambda \mathit{\boldsymbol{e}} $
(13) $ \mathit{\boldsymbol{\dot \eta = }}{{\mathit{\boldsymbol{\dot {\bar q}}}}_d} - \Lambda \mathit{\boldsymbol{e}} $
(14) 其中, $\rm{\Lambda}\in {{\bf{R}}^{3\times3}}$为正定、对角常值反馈阵.
显然, $\dot{\pmb{s}}$和$\dot{\pmb{\eta}}$满足
$ \dot{\pmb{s}}=\dot{\bar{\pmb{q}}}-\dot{\pmb{\eta}} $
(15) 将式(15)代入慢变子系统式(9), 得
$ \bar{M}_{rr}\ddot{\pmb{s}}+\bar{H}_{rr}\dot{\pmb{s}}=\begin{bmatrix}\tau_{0}\\ \pmb{\tau}^{s}_{n}\end{bmatrix}-\bar{M}_{rr}\ddot{\pmb{\eta}}-\bar{H}_{rr}\dot{\pmb{\eta}}+\pmb{\tau}_{d} $
(16) 考虑机械臂同时存在模型参数不确定情况, 定义式(16)中$\bar{M}_{rr}$和$\bar{H}_{rr}$的实时在线估计值分别为$\hat{\bar{M}}_{rr}$和$\hat{\bar{H}}_{rr}$, 并初步设计慢变控制规律
$ \begin{bmatrix}\tau_{0}\\ \pmb{\tau}^{s}_{n}\end{bmatrix}=\hat{\bar{M}}_{rr}\ddot{\pmb{\eta}}+\hat{\bar{H}}_{rr}\dot{\pmb{\eta}}-K\dot{\pmb{s}}-\pmb{\tau}_{rob} $
(17) 其中, $K\in {{\bf{R}}^{3\times3}}$为对角、正定增益反馈矩阵, $\pmb{\tau}_{rob}\in {{\bf{R}}^{3}}$为设计的鲁棒抗扰控制项.
将慢变控制律(17)代入式(16), 得
$ \begin{array}{l} {{\bar M}_{rr}}\mathit{\boldsymbol{\ddot s}} + {{\bar H}_{rr}}\mathit{\boldsymbol{\dot s}} = \left( {{{\widehat {\bar M}}_{rr}} - {{\bar M}_{rr}}} \right)\mathit{\boldsymbol{\ddot \eta }} + \\ \;\;\;\;\;\;\;\left( {{{\widehat {\bar H}}_{rr}} - {{\bar H}_{rr}}} \right)\mathit{\boldsymbol{\dot \eta }} - K\mathit{\boldsymbol{\dot s}} - {\mathit{\boldsymbol{\tau }}_{rob}} + {\mathit{\boldsymbol{\tau }}_d} \end{array} $
(18) 根据$\bar{M}_{rr}$定义及式(2)的系统参数线性化性质, 式(18)可进一步改写为
$ \bar{M}_{rr}\ddot{\pmb{s}}+\bar{H}_{rr}\dot{\pmb{s}}=\bar{Y}_{r}(\bar{\pmb{q}}, \dot{\bar{\pmb{q}}}, \dot{\pmb{\eta}}, \ddot{\pmb{\eta}})\tilde{\pmb{\varphi}}-K\dot{\pmb{s}}-\pmb{\tau}_{rob}+\pmb{\tau}_{d} $
(19) 其中, $\bar{Y}_{r}(\bar{\pmb{q}}, \dot{\bar{\pmb{q}}}, \dot{\pmb{\eta}}, \ddot{\pmb{\eta}})\in {{\bf{R}}^{3\times10}}$为从$(\hat{\bar{M}}_{rr}-\bar{M}_{rr})\ddot{\pmb{\eta}}+(\hat{\bar{H}}_{rr}-\bar{H}_{rr})\dot{\pmb{\eta}}$项中分离出来的机器人回归矩阵, $\tilde{\pmb{\varphi}}=(\hat{\pmb{\varphi}}-\pmb{\varphi})\in {{\bf{R}}^{10}}$为模型参数误差向量, $\hat{\pmb{\varphi}}$为所提组合惯性参数$\pmb{\varphi}$的在线实时估计列向量.
设列向量$\pmb{\varphi}$及外部扰动$\pmb{\tau}_{d}$的范数满足如下有界条件:
$ \left\| \mathit{\boldsymbol{\varphi }} \right\| \le {\varphi _{\max }} $
(20) $ \left\| {{\mathit{\boldsymbol{\tau }}_d}} \right\| \le {d_{\max }} $
(21) 其中, $\varphi_{\max}>0$, $d_{\max}>0$.
引入基于$\sigma$修正的参数自适应控制规律
$ \dot{\hat{\pmb{\varphi}}}=-\gamma_{0}\bar{Y}^{\rm T}_{r}\dot{\pmb{s}}-\gamma_{0}\sigma\hat{\pmb{\varphi}} $
(22) 其中,
$ \begin{array}{l} \\ \sigma = \left\{ {\begin{array}{*{20}{l}} {0, }&{\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\| < {\varphi _{\max }}}\\ {\gamma \left( {\frac{{\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\|}}{{{\varphi _{\max }}}} - 1} \right), }&{{\varphi _{\max }} \le \left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\| \le 2{\varphi _{\max }}}\\ {\gamma , }&{\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\| > 2{\varphi _{\max }}} \end{array}} \right. \end{array} $
调节系数$\gamma_{0}>0$, $\gamma>0$.同时, 将式(17)中的鲁棒控制项$\pmb{\tau}_{rob}$设计为
$ {\mathit{\boldsymbol{\tau }}_{rob}} = \left\{ {\begin{array}{*{20}{l}} {\frac{{{d_{\max }}}}{{\left\| {\mathit{\boldsymbol{\dot s}}} \right\|}}\mathit{\boldsymbol{\dot s}}, }&{\left\| {\mathit{\boldsymbol{\dot s}}} \right\| > \rho }\\ {\frac{{{d_{\max }}}}{\rho }\mathit{\boldsymbol{\dot s}}, }&{\left\| {\mathit{\boldsymbol{\dot s}}} \right\| \le \rho } \end{array}} \right. $
(23) 其中, $\rho>0$为边界层小常数.
定理1. 针对慢变子系统(9), 基于参数自适应修正控制律(22)和鲁棒抗扰控制律(23)设计的系统慢变控制律(17)可确保系统刚性变量跟踪误差收敛至一个接近于零的小邻域之内, 且一致最终有界.
证明. 选取满足正定性的准Lyapunov泛函
$ V=\frac{1}{2}\dot{\pmb{s}}^{\rm T}\bar{M}_{rr}\dot{\pmb{s}}+\frac{1}{2\gamma_{0}}\tilde{\pmb{\varphi}}^{\rm T}\tilde{\pmb{\varphi}}+\pmb{e}^{\rm T}{\rm{\Lambda}}K\pmb{e} $
(24) 求$\dot{V}$, 并将系统闭环误差式(19)代入, 得
$ \begin{align} & \dot{V}={{{\mathit{\boldsymbol{\dot{s}}}}}^{\text{T}}}({{{\bar{Y}}}_{r}}\widetilde{\mathit{\boldsymbol{ }}\!\!\varphi\!\!\text{ }}-K\mathit{\boldsymbol{\dot{s}}}-{{\mathit{\boldsymbol{ }}\!\!\tau\!\!\text{ }}_{rob}}+{{\mathit{\boldsymbol{ }}\!\!\tau\!\!\text{ }}_{d}}-{{{\bar{H}}}_{rr}}\mathit{\boldsymbol{\dot{s}}})~+ \\ & \ \ \ \ \ \ \frac{1}{2}{{{\mathit{\boldsymbol{\dot{s}}}}}^{\text{T}}}{{{\dot{\bar{M}}}}_{rr}}\mathit{\boldsymbol{\dot{s}}}+\frac{1}{{{\gamma }_{0}}}{{\widetilde{\mathit{\boldsymbol{ }}\!\!\varphi\!\!\text{ }}}^{\text{T}}}\overset{\mathit{\boldsymbol{.}}}{\mathop{\widetilde{\mathit{\boldsymbol{ }}\!\!\varphi\!\!\text{ }}}}\,+2{{\mathit{\boldsymbol{e}}}^{\text{T}}}\Lambda K\mathit{\boldsymbol{\dot{e}}} \\ \end{align} $
(25) 利用关系式$\pmb{z}^{\rm T}_{r}\dot{\bar{M}}_{rr}\pmb{z}_{r}=2\pmb{z}^{\rm T}_{r}\bar{H}_{rr}\pmb{z}_{r}$及自适应修正控制律式(22), 有
$ \dot{V}=-\dot{\pmb{s}}^{\rm T}K\dot{\pmb{s}}+2\pmb{e}^{\rm T}{\rm{\Lambda}} K\dot{\pmb{e}}-\sigma\tilde{\pmb{\varphi}}^{\rm T}\hat{\pmb{\varphi}}-\dot{\pmb{s}}^{\rm T}\pmb{\tau}_{rob}+\dot{\pmb{s}}^{\rm T}\pmb{\tau}_{d} $
(26) 结合式(13), 将式(26)右端前两项之和改写为
$ -\dot{\pmb{s}}^{\rm T}K\dot{\pmb{s}}+2\pmb{e}^{\rm T}{\rm{\Lambda}} K\dot{\pmb{e}}=-\dot{\pmb{e}}^{{\rm T}}K\dot{\pmb{e}}-\pmb{e}^{\rm T}{\rm{\Lambda}} K\pmb{e} \leq0 $
(27) 根据$\tilde{\pmb{\varphi}}$定义及式(20), 整理式(26)右端第三项, 得
$ \begin{array}{l} - \sigma {\mathit{\boldsymbol{\widetilde \varphi }}^{\rm{T}}}\mathit{\boldsymbol{\widehat \varphi }} = \sigma ({\mathit{\boldsymbol{\varphi }}^{\rm{T}}}\mathit{\boldsymbol{\widehat \varphi }} - {\mathit{\boldsymbol{\widehat \varphi }}^{\rm{T}}}\mathit{\boldsymbol{\widehat \varphi }}) \le \\ \;\;\;\;\;\;\;\;\;\;\;\;\;\;\sigma (\left\| \mathit{\boldsymbol{\varphi }} \right\| - \left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\|)\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\| \le \\ \;\;\;\;\;\;\;\;\;\;\;\;\;\;\sigma ({\varphi _{\max }} - \left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\|)\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\| \end{array} $
(28) 情形1. $\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\|<{\varphi _{\max }}$时, 式(28)满足
$ -\sigma\tilde{\pmb{\varphi}}^{\rm T}\hat{\pmb{\varphi}}=0 $
(29) 情形2. ${\varphi _{\max }} \le \left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\| \le 2{\varphi _{\max }}$时, 式(28)表示为
$ \begin{array}{l} - \sigma {\mathit{\boldsymbol{\widetilde \varphi }}^{\rm{T}}}\mathit{\boldsymbol{\widehat \varphi }} \le \gamma \left( {\frac{{\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\|}}{{{\varphi _{\max }}}} - 1} \right)({\varphi _{\max }} - \left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\|)\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\| = \\ \;\;\;\;\;\;\;\;\;\;\;\; - \gamma \frac{{{{({\varphi _{\max }} - \left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\|)}^2}}}{{{\varphi _{\max }}}}\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\| \le 0 \end{array} $
(30) 情形3. $\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\| > 2{\varphi _{\max }}$时, 式(28)可改写为
$ - \sigma {\mathit{\boldsymbol{\widetilde \varphi }}^{\rm{T}}}\mathit{\boldsymbol{\widehat \varphi }} \le \gamma ({\varphi _{\max }} - \left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\|)\left\| {\mathit{\boldsymbol{\widehat \varphi }}} \right\|<0 $
(31) 综合上述分析结果可知, 式(26)满足
$ \dot{V}\leq-\dot{\pmb{e}}^{\rm T}K\dot{\pmb{e}}-\pmb{e}^{\rm T}{\rm{\Lambda}} K\pmb{e}-\dot{\pmb{s}}^{\rm T}\pmb{\tau}_{rob}+\Vert\dot{\pmb{s}}\Vert\vert\pmb{\tau}_{d}\Vert $
(32) 考虑式(23)确定的鲁棒控制项$\pmb{\tau}_{rob}$及式(32), 对慢变子系统的稳定性进行分析.
分析1. $\Vert\dot{\pmb{s}}\Vert>\rho$时, 式(32)满足
$ \dot V \le - {\mathit{\boldsymbol{\dot e}}^{\rm{T}}}K\mathit{\boldsymbol{\dot e}} - {\mathit{\boldsymbol{e}}^{\rm{T}}}\Lambda K\mathit{\boldsymbol{e}} + \left\| {\mathit{\boldsymbol{\dot s}}} \right\|(\left\| {{\mathit{\boldsymbol{\tau }}_d}} \right\| - {d_{\max }}) \le 0 $
(33) 分析2. $\Vert\dot{\pmb{s}}\Vert\leq\rho$时, 式(32)整理为
$ \begin{array}{l} \dot V \le - {{\mathit{\boldsymbol{\dot e}}}^{\rm{T}}}K\mathit{\boldsymbol{\dot e}} - {\mathit{\boldsymbol{e}}^{\rm{T}}}\Lambda K\mathit{\boldsymbol{e}} + \left( {\left\| {\mathit{\boldsymbol{\dot s}}} \right\| - \frac{{{{\left\| {\mathit{\boldsymbol{\dot s}}} \right\|}^2}}}{\rho }} \right){d_{\max }} \le \\ \;\;\;\;\; - {{\mathit{\boldsymbol{\dot e}}}^{\rm{T}}}K\mathit{\boldsymbol{\dot e}} - {\mathit{\boldsymbol{e}}^{\rm{T}}}\Lambda K\mathit{\boldsymbol{e}} + \frac{{\rho {d_{\max }}}}{4} \end{array} $
(34) 令$\pmb{E}=[\pmb{e}^{\rm T}, \dot{\pmb{e}}^{\rm T}]^{\rm T}$, $Q={bmatrix}{\rm{\Lambda}} K&{\bf 0}_{3\times 3}\\ {\bf 0}_{ 3\times 3}&K{bmatrix}$, 式(34)可改写为
$ \dot V = - {\mathit{\boldsymbol{E}}^{\rm{T}}}Q\mathit{\boldsymbol{E}} + \frac{{\rho {d_{\max }}}}{4} $
(35) 显然, 只要系统满足
$ \left\| \mathit{\boldsymbol{E}} \right\| > \sqrt {\frac{{\rho {d_{\max }}}}{{4{\lambda _{\min }}(Q)}}} $
(36) 即可实现$\dot{V} < 0$, 进而确保系统跟踪误差的渐近稳定性.反之, $\Vert\pmb{E}\Vert$将处于一个接近于零的小邻域误差范围之内(半径为$\sqrt {\rho {d_{\max }}/(4{\lambda _{\min }}(Q))} $), 且一致最终有界.
2.3 振动同步抑制的改进最优控制
前述改进自适应鲁棒抗扰控制方案虽然可解决不确定弹性基和弹性关节空间机器人刚性运动的轨迹跟踪控制问题, 但其整体控制性能及控制稳定性却受限于系统基座关节产生的弹性振动.为实现对上述两种弹性振动的有效抑制, 本节基于快变子系统(12)开展相应的快变控制方案设计.
通常情况下, 若$\pmb{Z}_{f}=[Z_{1}, \pmb{Z}^{\rm T}_{2}, Z_{3}, \pmb{Z}^{\rm T}_4]^{\rm T}$实时可测, 则可使用快变状态PD负反馈控制
$ \pmb{\tau}^{f}_{n}=-K_{f}\pmb{Z}_{f} $
(37) 来抑制系统的弹性振动.其中, $K_{f}\in {{\bf{R}}^{2\times6}}$为控制增益常值阵.需要说明的是, 此方案虽然可在一定程度上抑制系统的弹性振动, 但$K_{f}$中各元素的选取需经多次尝试确定, 往往难以选到最佳值.为此, 采用最优控制理论对$K_{f}$的取值进行优化, 以获得最优值$K_{\rm opt}$.设快变系统的性能指标泛函
$ J_{f}=\frac{1}{2}\int_0^\infty[\pmb{Z}^{\rm T}_{f}Q_{f}\pmb{Z}_{f}+(\pmb{\tau}^{f}_{n})^{\rm T}R_{f}\pmb{\tau}^{f}_{n}]\, \mathit{\boldsymbol{d}}t $
(38) 其中, $Q_{f}\in {{\bf{R}}^{6\times6}}$为关于$\pmb{Z}_{f}$的半正定、对称常值阵, $R_{f}\in {{\bf{R}}^{2\times2}}$为关于$\pmb{\tau}^{f}_{n}$的正定、对称常值阵.然后, 求解出如下Ricatti方程:
$ A^{\rm T}_{f}P_{f}+P_{f}A_{f}-P_{f}B_{f}R^{-1}_{f}B_{f}^{\rm T}P_{f}+Q_{f}=0 $
(39) 的唯一解$P_{f}\in {{\bf{R}}^{6\times6}}$.最终, 设计得到如下最优解:
$ K_{\rm opt}=R^{-1}_{f}B^{\rm T}_{f}P_{f} $
(40) 一般来说, 快变位置量$x_{b}$和$\pmb{\delta}_{a}$往往容易得到(即$Z_{1}$, $\pmb{Z}_{2}$已知), 但其相应的速度量$\dot{x}_{b}$和$\dot{\pmb{\delta}}_{a}$却难以轻易获得(即$Z_{3}$, $\pmb{Z}_{4}$未知).显然, 这将极大地限制上述快变控制方案的实际应用.为此, 引入一种高增益线性状态观测器来解决上述问题[22].
定义$\pmb{\omega}=[x_{b}, \pmb{\delta}_{a}^{\rm T}]^{\rm T}$为系统的真实弹性变形列向量, 零向量$\pmb{\omega}_{d}\in {{\bf{R}}^{3}}$为$\pmb{\omega}$对应的期望列向量, 则系统的变形误差量为$\pmb{\omega}-\pmb{\omega}_{d}=\pmb{\omega}$.若继续定义$\hat{\pmb{\omega}}=$$[\hat{x}_{b}, \hat{\pmb{\delta}}_{a}^{\rm T}]^{\rm T}$为$\pmb{\omega}$的观测值, $\hat{\pmb{\psi}}\in {{\bf{R}}^{3}}$为中间滤波信号, 则可设计如下快变高阶量的速度观测器:
$ \begin{bmatrix}\dot{\hat{\pmb{\omega}}}\\\dot{\hat{\pmb{\psi}}}\end{bmatrix}= \begin{bmatrix}\hat{\pmb{\psi}}\\{{\bf{0}}_{3\times1}}\end{bmatrix}+\begin{bmatrix}G_{1}\\G_{2}\end{bmatrix}(\pmb{\omega}-\hat{\pmb{\omega}}) $
(41) 其中, $G_{1}\in {{\bf{R}}^{3\times3}}$, $G_{2}\in {{\bf{R}}^{3\times3}}$分别为比例、微分高增益对角阵, 且$\hat{\pmb{\omega}}$及$\hat{\pmb{\psi}}$各元素初始值均设定为零.
基于式(41), 可分别观测出$Z_{3}$和$\pmb{Z}_{4}$的估计值$\hat{Z_{3}}$和$\hat{\pmb{Z}_{4}}$, 进而获得$\hat{\pmb{Z}}_{f}=[Z_{1}, \pmb{Z}^{\rm T}_{2}, \hat{Z}_{3}, \hat{\pmb{Z}}^{\rm T}_{4}]^{\rm T}$.式(37)最终被修正为
$ \pmb{\tau}^{f}_{n}=-K_{\rm opt}\hat{\pmb{Z}}_{f} $
(42) 很显然, 线性叠加式(17)中的$\pmb{\tau}^{s}_{n}$和式(42)中的$\pmb{\tau}^{f}_{n}$可求出新控制量$\pmb{\tau}_{n}$, 即$\pmb{\tau}_{n}=\pmb{\tau}^{s}_{n}+\pmb{\tau}^{f}_{n}$.于是, 弹性基和弹性关节空间机器人的最终控制律将由式(7), (17), (22), (23), (42)来确定.
3. 仿真示例分析
运用上文所提控制方案对图 1系统进行仿真试验研究, 并观察空间机器人的轨迹跟踪控制效果及弹性振动抑制情况.模型参数:基座$W_{0}$, 臂杆$W_{1}$和$W_{2}$, 载荷$W_{3}$的质量分别为${m_0} = 60{\rm{kg}}$, $m_{1}$$ = {m_2} = 6{\rm{kg}}$, ${m_3} = 3{\rm{kg}}$, 它们的转动惯量分别为${J_0} = 30{\rm{kg}} \cdot {{\rm{m}}^2}$, $J_{1}=J_{2}=3{\rm{kg}} \cdot {{\rm{m}}^2}$, $J_{3}=1.5{\rm{kg}} \cdot {{\rm{m}}^2}$; 基座中心$C_{0}$沿$x_{0}$轴方向距离基座边缘的长度为${l_0} = 1{\rm{m}}$, 臂杆$W_{1}$和$W_{2}$的几何长度为$l_{1}$ $=l_{2}=2{\rm{m}}$; 参阅文献[11, 13], 选取关节1和2驱动电机转子的转动惯量及扭转刚度分别为$J_{1a}=$$J_{2a}$ $=0.08{\rm{kg}} \cdot {{\rm{m}}^2}$, $ {k_{1a}} = {k_{2a}} = 50{\rm{N}} \cdot {\rm{m}}/{\rm{rad}}$; 基座弹簧的刚度为${k_0} = 500{\rm{N}}/m$.弹性基和弹性关节空间机器人系统动力学模型式(1)中$D(\pmb{q})$, $H(\pmb{q}, \dot{\pmb{q}})$各子元素$D_{ij}$, $H_{ij}$$(i=1, 2, 3, 4;j=1, 2, 3, 4)$的表达式见附录A.
系统的初始位置设定为
$ \mathit{\boldsymbol{q}}(0) = {[0{\rm{m,}}0.86{\rm{rad,}}0.9{\rm{rad,}}1{\rm{rad}}]^{\rm{T}}} $
$ {\mathit{\boldsymbol{\theta }}_a}\left( 0 \right) = {[0.9{\rm{rad}},1{\rm{rad}}]^{\rm{T}}} $
并要求其跟踪如下基座姿态与关节期望轨迹(单位rad)
$ \begin{array}{l} {\alpha _{0d}} = \frac{\pi }{4} + \frac{1}{3}\sin \left( {\frac{\pi }{3}t} \right)\\ {\mathit{\boldsymbol{\theta }}_d} = {\left[ {\frac{\pi }{3} - \frac{1}{2}\sin \left( {\frac{\pi }{3}t} \right), \frac{\pi }{3} + \frac{1}{2}\sin \left( {\frac{\pi }{3}t} \right)} \right]^{\rm{T}}} \end{array} $
设系统因末端载荷未知引起系统模型参数的不确定性, 初始估计值设置为${\hat m_3} = 0{\rm{kg}}$, $\hat{J}_{3}=$ $0{\rm{kg}} \cdot {{\rm{m}}^2}$; 机器人系统的有界外部扰动设置为$\pmb{\tau}_{d}=$$[5\sin(2t)$, $5\sin (t),5\cos (t){]^{\rm{T}}}{\rm{N}} \cdot {\rm{m}}$; 所提控制方案中的控制参数选为${K_e} = {\rm{diag}}\{ 15,15\} $, ${\Lambda}={\rm{diag}}\{6$, $6, 6\}$, $K={\rm{diag}}\{2, 2, 2\}$, $\varphi_{\max}=73$, $d_{\max}=15$, $\gamma_{0}$ $=780$, $\gamma=1$, $\rho=0.06$, $Q_{f}={\rm{diag}}\{0.01, 0.01, $$0.01, 0.01, 0.01, 0.01\}$, $R_{f}={\rm{diag}}\{1, 1\}$, $G_{1}=G_{2}$ $=$${\rm{diag}}\{150, 150, 150\}$.系统仿真持续时间设定为$t$ $=$$10{\rm{s}}$.
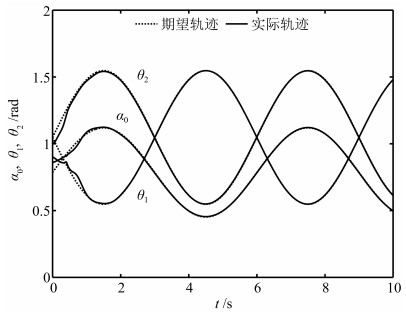
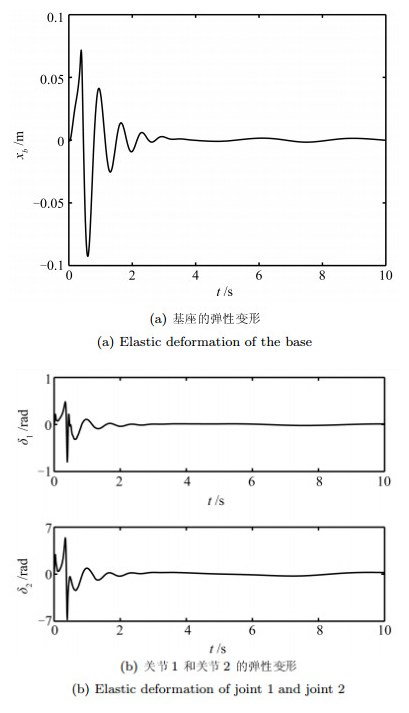
图 2~4给出了系统在开启和关闭自适应鲁棒抗扰控制项$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$情形下耗时$t=10{\rm{s}}$的仿真控制结果.其中, 图 2为弹性基、弹性关节空间机器人基座姿态$\alpha_{0}$、臂杆关节转角$\theta_{1}$和$\theta_{2}$在所提混合控制方案控制下得到的实时轨迹跟踪曲线; 图 3为关闭其中的系统自适应鲁棒抗扰控制项式(22)和(23)后得到的系统各刚性转角实际运动轨迹的偏离情况示意图; 图 4给出了开启和关闭自适应鲁棒抗扰控制项时系统载体基座、弹性关节1和弹性关节2的弹性变形情况.比较图 2和图 3可知, 若没有事先对空间机器人控制系统采取必要的自适应鲁棒抗扰设计, 空间机器人具有的不确定性将大大降低其真实轨迹跟踪性能; 图 4则表明, 自适应鲁棒抗扰慢变控制项虽然在控制之初会激励起一定的系统弹性振动, 但在高增益线性状态观测最优反馈控制项式(42)的作用下, 基座及各柔性关节的弹性振动在$t=$ $4{\rm{s}}$之后仍将得到良好抑制, 更进一步, 若同时关闭自适应鲁棒抗扰控制项和快变子系统的状态观测最优反馈控制项, 重新对系统进行仿真控制, 图 5给出了前$t=3{\rm{s}}$内的仿真结果.此时, 由于快变子系统并未受到有效主动地控制, 空间机器人基座及各关节将在很短的时间内产生大幅度的弹性振动, 且受其影响下的系统跟踪误差亦持续扩大, 并最终导致仿真运算发散.
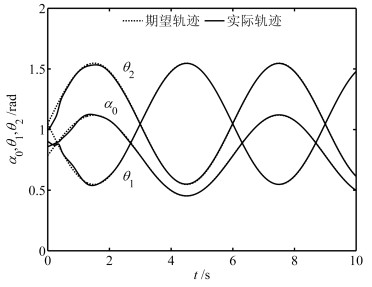 图 2 开启$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的轨迹跟踪情况Fig. 2 Trajectory tracking with $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$
图 2 开启$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的轨迹跟踪情况Fig. 2 Trajectory tracking with $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$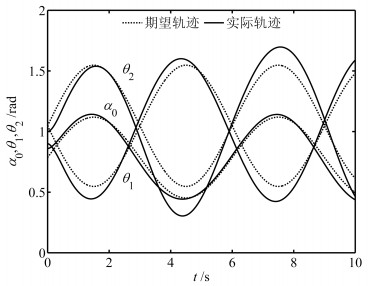 图 3 关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的轨迹跟踪情况Fig. 3 Trajectory tracking without $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$
图 3 关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的轨迹跟踪情况Fig. 3 Trajectory tracking without $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$ 图 4 开启和关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的仿真结果Fig. 4 Simulation results with and without $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$
图 4 开启和关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的仿真结果Fig. 4 Simulation results with and without $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$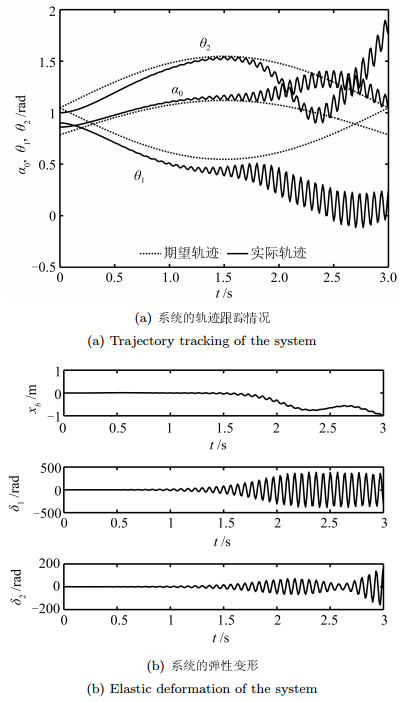 图 5 关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$和$\pmb{\tau}^{f}_{n}$时的仿真结果Fig. 5 Simulation results without $\dot{\hat{\pmb{\varphi}}}$, $\pmb{\tau}_{rob}$ and $\pmb{\tau}^{f}_{n}$
图 5 关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$和$\pmb{\tau}^{f}_{n}$时的仿真结果Fig. 5 Simulation results without $\dot{\hat{\pmb{\varphi}}}$, $\pmb{\tau}_{rob}$ and $\pmb{\tau}^{f}_{n}$为进一步研究不同刚度值对系统控制器参数设计和控制性能的影响, 重新设定基座刚度${k_0} = 1000{\rm{N}}/{\rm{m}}$, 关节1刚度${k_{1a}} = 500{\rm{N}} \cdot {\rm{m}}/{\rm{rad}}$, 关节2刚度$k_{2a}=30{\rm{N}} \cdot {\rm{m}}/{\rm{rad}}$.考虑到此时关节1刚度选取得足够大, 而关节2刚度选取得比原先还小, 因此本文在保持系统其他控制器参数不变的情况下, 相应调整了柔性补偿参数${K_e} = {\rm{diag}}\{ 0,25\} $ (即不对关节1进行柔性补偿, 提高对关节2的柔性补偿度)及快变加权参数$R_{f}={\rm{diag}}\{0.01, 2\}$后, 再次对系统进行仿真控制, 仿真结果如图 6和图 7所示.对比图 2和图 6可知, 只要系统控制器参数选取适当, 文中所提控制方案依然可以获得良好的刚性轨迹跟踪控制性能.对比图 4和图 7可以发现, 若系统刚度值选取越大, 系统在轨迹跟踪过程中产生的振动就越小, 例如刚度提高后, 基座最大振幅从原先的大于0.1 m缩小至0.1 m之内; 关节1在未经柔性补偿的情况下, 最大振幅从原先的大于3 rad缩小到1 rad之内.反之, 若系统刚度值选取越小, 则系统产生的振动就越大, 例如刚度降低后, 关节2在有柔性补偿的情况下, 最大振幅从原先的4 rad之内扩大至接近7 rad.
4. 结论
本文研究了不确定漂浮弹性基和弹性关节空间机器人的轨迹跟踪控制与双柔性振动抑制问题.基于漂浮弹性基和弹性关节空间机器人的动力学模型, 运用等效刚度奇异摄动法对其进行双时标分解, 得到描述系统基座姿态和臂杆转角刚性运动的慢变子系统及表征基座和关节弹性运动的快变子系统.在机器人面临参数不确定及有界外部扰动工况下, 针对慢变子系统设计了基座姿态与臂杆转角刚性协调运动的自适应鲁棒抗扰控制方案; 该慢变控制方案运用改进自适应调节律来补偿系统参数不确定性的影响, 同时采用鲁棒抗扰项来消除外部扰动影响, 有效避免了传统参数自适应控制律因受外部扰动影响而出现的估计参数漂移问题.在快变子系统控制方面, 提出了基座和关节弹性振动同步抑制的高增益线性状态观测最优反馈控制方案; 由于该方案仅要求测量系统的快变位置量, 不要求测量系统的快变速度量, 因此更适于实际应用.仿真验证试验表明, 所提混合控制方案具备良好的运动抗扰性, 且可对基座和关节的弹性振动进行同步, 有效地抑制.
附录A
1) 动力学模型(1)中${D}(\pmb{q})$各子元素的表达式如下:
$ \begin{array}{l} {D_{11}} = {\varphi _1}\\ {D_{12}} = - {\varphi _2}\sin ({\theta _1}) - {\varphi _3}\sin ({\theta _1} + {\theta _2})\\ {D_{12}} = - {\varphi _2}\sin ({\theta _1}) - {\varphi _3}\sin ({\theta _1} + {\theta _2})\\ {D_{12}} = - {\varphi _2}\sin ({\theta _1}) - {\varphi _3}\sin ({\theta _1} + {\theta _2})\\ {D_{13}} = - {\varphi _2}\sin ({\theta _1}) - {\varphi _3}\sin ({\theta _1} + {\theta _2})\\ {D_{14}} = - {\varphi _3}\sin ({\theta _1} + {\theta _2})\\ {D_{21}} = {D_{12}}\\ {D_{22}} = {\varphi _1}x_b^2 + 2{\varphi _2}{x_b}\cos ({\theta _1}) + 2{\varphi _3}{x_b}\cos ({\theta _1} + {\theta _2}) + \\ \;\;\;\;\;\;\;\;\;{\varphi _4} + {\varphi _5} + {\varphi _6} + 2{\varphi _7}\cos ({\theta _1} + {\theta _2}) + \\ \;\;\;\;\;\;\;\;\;2{\varphi _8}\cos ({\theta _2}) + 2{\varphi _9}{x_b} + 2{\varphi _{10}}\cos ({\theta _1})\\ {D_{23}} = {\varphi _2}{x_b}\cos ({\theta _1}) + {\varphi _3}{x_b}\cos ({\theta _1} + {\theta _2}) + {\varphi _5} + {\varphi _6} + \\ \;\;\;\;\;\;\;\;{\varphi _7}\cos ({\theta _1} + {\theta _2}) + 2{\varphi _8}\cos ({\theta _2}) + {\varphi _{10}}\cos ({\theta _1})\\ {D_{24}} = {\varphi _3}{x_b}\cos ({\theta _1} + {\theta _2}) + {\varphi _6} + {\varphi _7}\cos ({\theta _1} + {\theta _2}) + \\ \;\;\;\;\;\;\;\;{\varphi _8}\cos ({\theta _2})\\ {D_{31}} = {D_{13}}\\ {D_{32}} = {D_{23}}\\ {D_{33}} = {\varphi _5} + {\varphi _6} + 2{\varphi _8}\cos ({\theta _2})\\ {D_{34}} = {\varphi _6} + {\varphi _8}\cos ({\theta _2})\\ {D_{41}} = {D_{14}}\\ {D_{42}} = {D_{24}}\\ {D_{43}} = {D_{34}}\\ {D_{44}} = {\varphi _6} \end{array} $
2) ${H}(\pmb{q}, \dot{\pmb{q}})$各子元素的具体表达式如下:
$ \begin{array}{l} {H_{11}} = 0\\ {H_{12}} = - {\varphi _1}{{\dot \theta }_0}{x_b} - {\varphi _2}({{\dot \theta }_0} + {{\dot \theta }_1})\cos ({\theta _1}) - \\ \;\;\;\;\;\;\;\;\;{\varphi _3}({{\dot \theta }_0} + {{\dot \theta }_1} + {{\dot \theta }_2})\cos ({\theta _1} + {\theta _2}) - {\varphi _9}{{\dot \theta }_0}\\ {H_{13}} = - {\varphi _2}({{\dot \theta }_0} + {{\dot \theta }_1})\cos ({\theta _1}) - \\ \;\;\;\;\;\;\;\;{\varphi _3}({{\dot \theta }_0} + {{\dot \theta }_1} + {{\dot \theta }_2})\cos ({\theta _1} + {\theta _2})\\ {H_{14}} = - {\varphi _3}({{\dot \theta }_0} + {{\dot \theta }_1} + {{\dot \theta }_2})\cos ({\theta _1} + {\theta _2})\\ {H_{21}} = {\varphi _1}{{\dot \theta }_0}{x_b} + {\varphi _2}{{\dot \theta }_0}\cos ({\theta _1}) + \\ \;\;\;\;\;\;\;\;\;{\varphi _3}{{\dot \theta }_0}\cos ({\theta _1} + {\theta _2}) + {\varphi _9}{{\dot \theta }_0}\\ {H_{22}} = {\varphi _1}{{\dot \theta }_0}{x_b} + {\varphi _2}[{{\dot x}_b}\cos ({\theta _1}) - {{\dot \theta }_1}{x_b}\sin ({\theta _1})] + \\ \;\;\;\;\;\;\;\;\;{\varphi _3}[{{\dot x}_b}\cos ({\theta _1} + {\theta _2}) - {{\dot \theta }_1}{x_b}\sin ({\theta _1} + {\theta _2}) - \\ \;\;\;\;\;\;\;\;\;{{\dot \theta }_2}{x_b}\sin ({\theta _1} + {\theta _2})] - {\varphi _7}({{\dot \theta }_1} + {{\dot \theta }_2})\sin ({\theta _1} + {\theta _2}) - \\ \;\;\;\;\;\;\;\;\;{\varphi _8}{{\dot \theta }_2}\sin ({\theta _2}) + {\varphi _9}{{\dot x}_b} - {\varphi _{10}}{{\dot \theta }_1}\sin ({\theta _1})\\ {H_{23}} = - {\varphi _2}{x_b}({{\dot \theta }_0} + {{\dot \theta }_1})\sin ({\theta _1}) - \\ \;\;\;\;\;\;\;\;{\varphi _3}{x_b}({{\dot \theta }_0} + {{\dot \theta }_1} + {{\dot \theta }_2})\sin ({\theta _1} + {\theta _2}) - \\ \;\;\;\;\;\;\;\;{\varphi _7}({{\dot \theta }_0} + {{\dot \theta }_1} + {{\dot \theta }_2})\sin ({\theta _1} + {\theta _2}) - {\varphi _8}{{\dot \theta }_2}\sin ({\theta _2}) - \\ \;\;\;\;\;\;\;\;{\varphi _{10}}({{\dot \theta }_1} + {{\dot \theta }_2})\sin ({\theta _1})\\ {H_{24}} = - {\varphi _3}{x_b}({{\dot \theta }_0} + {{\dot \theta }_1} + {{\dot \theta }_2})\sin ({\theta _1} + {\theta _2}) - \\ \;\;\;\;\;\;\;\;\;{\varphi _7}({{\dot \theta }_0} + {{\dot \theta }_1} + {{\dot \theta }_2})\sin ({\theta _1} + {\theta _2}) - \\ \;\;\;\;\;\;\;\;\;{\varphi _8}({{\dot \theta }_0} + {{\dot \theta }_1} + {{\dot \theta }_2})\sin ({\theta _2})\\ {H_{31}} = {\varphi _2}{{\dot \theta }_0}\cos ({\theta _1}) + {\varphi _3}{{\dot \theta }_0}\cos ({\theta _1} + {\theta _2})\\ {H_{32}} = {\varphi _2}[{{\dot x}_b}\cos ({\theta _1}) + {{\dot \theta }_0}{x_b}\sin ({\theta _1})] + \\ \;\;\;\;\;\;\;\;\;{\varphi _3}[{{\dot x}_b}\cos ({\theta _1} + {\theta _2}) + {{\dot \theta }_0}{x_b}\sin ({\theta _1} + {\theta _2})] + \\ \;\;\;\;\;\;\;\;\;{\varphi _7}{{\dot \theta }_0}\sin ({\theta _1} + {\theta _2}) - {\varphi _8}{{\dot \theta }_2}\sin ({\theta _2}) + \\ \;\;\;\;\;\;\;\;\;{\varphi _{10}}{{\dot \theta }_0}\sin ({\theta _1})\\ {H_{33}} = - {\varphi _8}{{\dot \theta }_2}\sin ({\theta _2})\\ {H_{34}} = - {\varphi _8}({{\dot \theta }_0} + {{\dot \theta }_1} + {{\dot \theta }_2})\sin ({\theta _2})\\ {H_{41}} = {\varphi _3}{{\dot \theta }_0}\cos ({\theta _1} + {\theta _2})\\ {H_{42}} = {\varphi _3}[{{\dot x}_b}\cos ({\theta _1} + {\theta _2}) + {{\dot \theta }_0}{x_b}\sin ({\theta _1} + {\theta _2})] + \\ \;\;\;\;\;\;\;\;\;{\varphi _7}{{\dot \theta }_0}\sin ({\theta _1} + {\theta _2}) + {\varphi _8}({{\dot \theta }_0} + {{\dot \theta }_1})\sin ({\theta _2})\\ {H_{43}} = {\varphi _8}({{\dot \theta }_0} + {{\dot \theta }_1})\sin ({\theta _2})\\ {H_{44}} = 0 \end{array} $
3) 上述表达式中的$\varphi_i$ $(i=1, \cdots, 10)$为系统组合惯性参数列向量的子元素, 具体为
$ \begin{array}{l} {\varphi _1} = {m_0}R_{00}^2 + {m_1}R_{10}^2 + {m_{2p}}R_{20}^2\\ {\varphi _2} = {m_0}{R_{00}}{R_{01}} + {m_1}{R_{10}}{R_{11}} + {m_{2p}}{R_{20}}{R_{21}}\\ {\varphi _3} = {m_0}{R_{00}}{R_{02}} + {m_1}{R_{10}}{R_{12}} + {m_{2p}}{R_{20}}{R_{22}}\\ {\varphi _4} = {J_0} + ({m_0}R_{00}^2 + {m_1}R_{10}^2 + {m_{2p}}R_{20}^2)l_0^2\\ {\varphi _5} = {J_1} + {m_0}R_{01}^2 + {m_1}R_{11}^2 + {m_{2p}}R_{21}^2\\ {\varphi _6} = {J_{2p}} + {m_0}R_{02}^2 + {m_1}R_{12}^2 + {m_{2p}}R_{22}^2\\ {\varphi _7} = ({m_0}{R_{00}}{R_{02}} + {m_1}{R_{10}}{R_{12}} + {m_{2p}}{R_{20}}{R_{22}}){l_0}\\ {\varphi _8} = {m_0}{R_{01}}{R_{02}} + {m_1}{R_{11}}{R_{12}} + {m_{2p}}{R_{21}}{R_{22}}\\ {\varphi _9} = ({m_0}R_{00}^2 + {m_1}R_{10}^2 + {m_{2p}}R_{20}^2){l_0}\\ {\varphi _{10}} = ({m_0}{R_{00}}{R_{01}} + {m_1}{R_{10}}{R_{11}} + {m_{2p}}{R_{20}}{R_{21}}){l_0} \end{array} $
其中,
$ \begin{array}{l} {R_{00}} = - \frac{{{m_1} + {m_{2p}}}}{M}\\ {R_{01}} = - \frac{{{m_1} + 2{m_{2p}}}}{{2M}}{l_1}\\ {R_{02}} = - \frac{{{m_2} + 2{m_3}}}{{2M}}{l_2}\\ {R_{10}} = {R_{00}} + 1\\ {R_{11}} = {R_{01}} + \frac{{{l_1}}}{2}\\ {R_{12}} = {R_{02}}\\ {R_{20}} = {R_{10}}\\ {R_{21}} = {R_{01}} + {l_1}\\ {R_{22}} = {R_{02}} + \frac{{(2{m_3} + {m_2}){l_2}}}{{2{m_{2p}}}}\\ {m_2}p = {m_2} + {m_3}\\ {J_{2p}} = {J_2} + {J_3} + {m_2}{\left[ {\frac{{(2{m_3} + {m_2}){l_2}}}{{2{m_{2p}}}} - \frac{{{l_2}}}{2}} \right]^2} + \\ \;\;\;\;\;\;\;\;{m_3}{\left[ {{l_2} - \frac{{(2{m_3} + {m_2}){l_2}}}{{2{m_{2p}}}}} \right]^2} \end{array} $
-
图 2 开启$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的轨迹跟踪情况
Fig. 2 Trajectory tracking with $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$
图 3 关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的轨迹跟踪情况
Fig. 3 Trajectory tracking without $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$
图 4 开启和关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的仿真结果
Fig. 4 Simulation results with and without $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$
图 5 关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$和$\pmb{\tau}^{f}_{n}$时的仿真结果
Fig. 5 Simulation results without $\dot{\hat{\pmb{\varphi}}}$, $\pmb{\tau}_{rob}$ and $\pmb{\tau}^{f}_{n}$
-
[1] Sukhanov V M, Sliaev A V, Glumov V M. Dynamic equations of free-flying space robot for feedback control tasks. Automation and Remote Control, 2015, 76(8):1446-1454 doi: 10.1134/S0005117915080093 [2] Flores-Abad A A, Ma O, Pham K, Ulrich S. A review of space robotics technologies for on-orbit servicing. Progress in Aerospace Sciences, 2014, 68:1-26 doi: 10.1016/j.paerosci.2014.03.002 [3] Kulakov F M. Remote control of space robots. Journal of Computer and Systems Sciences International, 2016, 55(4):635-682 doi: 10.1134/S1064230716030126 [4] 徐文福, 王学谦, 薛强, 梁斌.保持基座稳定的双臂空间机器人轨迹规划研究.自动化学报, 2013, 39(1):69-80 http://www.aas.net.cn/CN/abstract/abstract17850.shtmlXu Wen-Fu, Wang Xue-Qian, Xue Qiang, Liang Bin. Study on trajectory planning of dual-arm space robot keeping the base stabilized. Acta Automatica Sinica, 2013, 39(1):69-80 http://www.aas.net.cn/CN/abstract/abstract17850.shtml [5] Wang M, Sun L, Yin W, Dong S, Liu J T. Continuous robust control for series elastic actuator with unknown payload parameters and external disturbances. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4):620-627 doi: 10.1109/JAS.2017.7510610 [6] Xu B, Yuan Y. Two performance enhanced control of flexible-link manipulator with system uncertainty and disturbances. Science China Information Sciences, 2017, 60(5):Article No.050202 http://cn.bing.com/academic/profile?id=5c3fb590a438738bb47e2ad9660cbcee&encoded=0&v=paper_preview&mkt=zh-cn [7] Zhang L J, Chen L. Adaptive time varying sliding mode control and vibration suppression for space manipulator with fully flexible arms and uncertain parameters. Revista de la Facultad de Ingenierí, 2016, 31(9):232-245 http://cn.bing.com/academic/profile?id=eaa7c42ee1129f1d4c4225bc7205b6c1&encoded=0&v=paper_preview&mkt=zh-cn [8] Nanos K, Papadopoulos E G. On the dynamics and control of flexible joint space manipulators. Control Engineering Practice, 2015, 45:230-243 doi: 10.1016/j.conengprac.2015.06.009 [9] Ulrich S, Sasiadek J Z. Trajectory tracking control of flexible-joint space manipulators. Canadian Aeronautics and Space Journal, 2012, 58(1):47-59 doi: 10.5589/q12-004 [10] Yang Y B, Xu W F, Mu Z G. Dynamic modeling and vibration properties study for flexible-joint space manipulators. In:Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO). Bali, Indonesia:IEEE, 2014. 2443-2448 [11] 陈志勇, 陈力.姿态受控柔性关节双臂空间机器人的抗力矩饱和控制与振动抑制.工程力学, 2016, 33(5):227-233, 256 http://www.cnki.com.cn/Article/CJFDTotal-GCLX201605028.htmChen Zhi-Yong, Chen Li. Anti-torque-windup control and vibration suppression of flexible-joint dual-arm space robot with an attitude-controlled base. Engineering Mechanics, 2016, 33(5):227-233, 256 http://www.cnki.com.cn/Article/CJFDTotal-GCLX201605028.htm [12] Meng D S, Liang B, Xu W F, Wang X Q, Liu H D, Zhu X J. On the autonomous target capturing of flexible-base space robotic system. In:Proceedings of the 13th International Conference on Control Automation Robotics and Vision (ICARCV). Singapore, Singapore:IEEE, 2014. 1894-1899 [13] 元波, 陈力.基座弹性影响下空间机械臂的轨迹跟踪控制及弹性振动主动抑制.力学与实践, 2014, 36(5):598-603 doi: 10.6052/1000-0879-13-530Yuan Bo, Chen Li. Trajectory tracking control and vibration suppression of space-based robot with elastic foundation. Mechanics in Engineering, 2014, 36(5):598-603 doi: 10.6052/1000-0879-13-530 [14] Liang Z Y, Wang C L, Chen H, Li C H. Adaptive dynamic feedback tracking control for a robot-camera system with unknown parameters. Acta Automatica Sinica, 2016, 42(10):1595-1604 http://cn.bing.com/academic/profile?id=d7cbcc8fc863b19a3ac2db5d125bb7cc&encoded=0&v=paper_preview&mkt=zh-cn [15] Mahmoud M S, Nasir M T. Robust control design of wheeled inverted pendulum assistant robot. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4):628-638 doi: 10.1109/JAS.2017.7510613 [16] 黄攀峰, 胡永新, 王东科, 孟中杰, 刘正雄.空间绳系机器人目标抓捕鲁棒自适应控制器设计.自动化学报, 2017, 43(4):538-547 http://www.aas.net.cn/CN/abstract/abstract19032.shtmlHuang Pan-Feng, Hu Yong-Xin, Wang Dong-Ke, Meng Zhong-Jie, Liu Zheng-Xiong. Capturing the target for a tethered space robot using robust adaptive controller. Acta Automatica Sinica, 2017, 43(4):538-547 http://www.aas.net.cn/CN/abstract/abstract19032.shtml [17] Spong M W. Modeling and control of elastic joint robots. Journal of Dynamic Systems, Measurement, and Control, 1987, 109(4):310-319 doi: 10.1115/1.3143860 [18] Slotine J J E, Li W P. On the adaptive control of robot manipulators. The International Journal of Robotics Research, 1987, 6(3):49-59 doi: 10.1177/027836498700600303 [19] 刘业超, 刘伊威, 刘宏.柔性关节机器人奇异摄动控制.电机与控制学报, 2009, 13(3):436-441 http://mall.cnki.net/magazine/Article/DJKZ200903024.htmLiu Ye-Chao, Liu Yi-Wei, Liu Hong. Singular perturbation control for flexible-joint manipulator. Electric Machines and Control, 2009, 13(3):436-441 http://mall.cnki.net/magazine/Article/DJKZ200903024.htm [20] Zribi M, Ahmad S. Robust adaptive control of multiple robots in cooperative motion using sigma modification. In:Proceedings of the 1991 IEEE International Conference on Robotics and Automation. Sacramento, California, USA:IEEE, 1991, 3:2160-2165 [21] Danesh M, Keshmiri M, Sheikholeslam F. Developing a robot control scheme robust to uncertain model parameters and unmodeled dynamics. In:Proceedings of the 1st IEEE Conference on Industrial Electronics and Applications. Singapore, Singapore:IEEE, 2006. 1-6 [22] Lee J, Ha T J, Yeon J S, Lee S, Park J H. Robust nonlinear observer for flexible joint robot manipulators with only motor position measurement. In:Proceedings of the 2007 International Conference on Control, Automation, and Systems. Seoul, South Korea:IEEE, 2007. 56-61 -

 下载:
下载:
 下载:
下载:
计量
- 文章访问数: 2782
- HTML全文浏览量: 251
- PDF下载量: 640
- 被引次数: 0
