

Distributed Fusion Filtering for Multi-sensor Networked Uncertain Systems With Unknown Communication Disturbances and Compensations of Packet Dropouts
-
摘要: 研究了带有未知通信干扰、观测丢失和乘性噪声不确定性的多传感器网络化系统的状态估计问题.通过白色乘性噪声描述系统状态和观测中的随机不确定性,采用一组服从Bernoulli分布的随机变量描述网络传输过程中存在的观测丢失现象,且数据传输中存在未知的网络通信干扰.当发生丢包时,以当前丢失观测的预报值进行补偿.对每个单传感器子系统,应用线性无偏最小方差估计准则设计了不依赖于未知通信干扰的最优线性滤波器.推导了任两个局部滤波误差之间的互协方差阵.进而,应用矩阵加权融合估计算法给出了分布式融合状态滤波器.仿真例子验证了算法的有效性.Abstract: This paper is concerned with the state estimation problem for multi-sensor networked systems with unknown communication disturbances, measurement losses and multiplicative noise uncertainties. The random uncertainties of the state and measurements of systems are described by white multiplicative noises. The phenomena of measurement losses during data transmissions through networks are described by a group of Bernoulli distributed random variables. Unknown communication disturbances exist in data transmissions. The predictors of the lost measurements are used as the compensation in the presence of packet losses. By applying the linear unbiased minimum variance estimation criterion, an optimal linear filter independent of unknown communication disturbances is designed for every single sensor subsystem. Filtering error cross-covariance matrices between any two local filters are derived. Further, a distributed fusion state filter is presented by using the matrix-weighted fusion estimation algorithm. A simulation example is given to verify the effectiveness of the proposed algorithms.1) 本文责任编委 高会军
-

图 3 局部与分布式融合状态滤波器估计误差方差比较图
Fig. 3 Comparison of estimation error variances of local and distributed fusion state filters
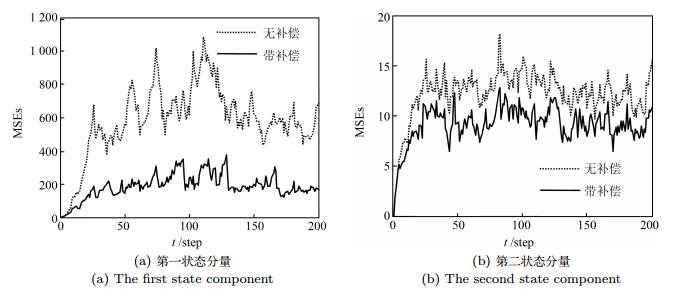
图 4 带补偿与无补偿的第3传感器子系统滤波器的MSE比较
Fig. 4 MSE comparison of the 3rd sensor subsystem filters with compensation and no compensation
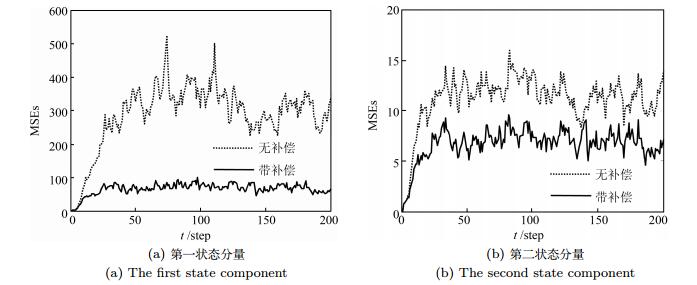
图 5 带补偿与无补偿的分布式融合滤波器的MSE比较
Fig. 5 MSE comparison of distributed fusion filters with compensation and no compensation
-
[1] 邢江, 关治洪.网络化控制系统的研究现状与展望.控制工程, 2006, 13(4):294-297 http://www.cnki.com.cn/Article/CJFDTOTAL-JZDF200604001.htmXing Jiang, Guan Zhi-Hong. Research progress and prospects of the networked control systems. Control Engineering of China, 2006, 13(4):294-297 http://www.cnki.com.cn/Article/CJFDTOTAL-JZDF200604001.htm [2] Zhang H S, Xie L H. Control and Estimation of Systems with Input/Output Delays. Berlin, Germany:Springer-Verlag, 2007. [3] Hespanha J P, Naghshtabrizi P, Xu Y G. A survey of recent results in networked control systems. Proceedings of the IEEE, 2007, 95(1):138-162 [4] 李洪波, 孙增圻, 孙富春.网络控制系统的发展现状及展望.控制理论与应用, 2010, 27(2):238-243 https://www.wenkuxiazai.com/doc/7727d54f767f5acfa1c7cd36.htmlLi Hong-Bo, Sun Zeng-Qi, Sun Fu-Chun. Networked control systems:an overview of state-of-the-art and the prospect in future research. Control Theory & Applications, 2010, 27(2):238-243 https://www.wenkuxiazai.com/doc/7727d54f767f5acfa1c7cd36.html [5] Lungu M, Lungu R. Full-order observer design for linear systems with unknown inputs. International Journal of Control, 2012, 85(10):1602-1615 doi: 10.1080/00207179.2012.695397 [6] Hsieh C S. On the global optimality of unbiased minimum-variance state estimation for systems with unknown inputs. Automatica, 2010, 46(4):708-715 doi: 10.1016/j.automatica.2010.01.029 [7] Yong S Z, Zhu M H, Frazzoli E. A unified filter for simultaneous input and state estimation of linear discrete-time stochastic systems. Automatica, 2016, 63:321-329 doi: 10.1016/j.automatica.2015.10.040 [8] 孙书利.具有一步随机滞后和多丢包的网络系统的最优线性估计.自动化学报, 2012, 38(3):349-356 http://www.aas.net.cn/CN/Y2012/V38/I3/349Sun Shu-Li. Optimal linear estimation for networked systems with one-step random delays and multiple packet dropouts. Acta Automatica Sinica, 2012, 38(3):349-356 http://www.aas.net.cn/CN/Y2012/V38/I3/349 [9] 李娜, 马静, 孙书利.带多丢包和滞后随机不确定系统的最优线性估计.自动化学报, 2015, 41(3):611-619 http://www.aas.net.cn/CN/Y2015/V41/I3/611Li Na, Ma Jing, Sun Shu-Li. Optimal linear estimation for stochastic uncertain systems with multiple packet dropouts and delays. Acta Automatica Sinica, 2015, 41(3):611-619 http://www.aas.net.cn/CN/Y2015/V41/I3/611 [10] Ma J, Sun S L. Optimal linear estimation for systems with multiplicative noise uncertainties and multiple packet dropouts. IET Signal Processing, 2012, 6(9):839-848 doi: 10.1049/iet-spr.2012.0065 [11] 李岳炀, 钟麦英.具有多测量数据包丢失的线性离散时变系统故障检测滤波器设计.自动化学报, 2015, 41(9):1638-1648 http://www.aas.net.cn/CN/Y2015/V41/I9/1638Li Yue-Yang, Zhong Mai-Ying. Fault detection filter design for linear discrete time-varying systems with multiple packet dropouts. Acta Automatica Sinica, 2015, 41(9):1638-1648 http://www.aas.net.cn/CN/Y2015/V41/I9/1638 [12] Xia Y Q, Shang J Z, Chen J, Liu J P. Networked data fusion with packet losses and variable delays. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2009, 39(5):1107-1120 doi: 10.1109/TSMCB.2009.2012437 [13] 赵国荣, 韩旭, 万兵, 闫鑫.具有传感器增益退化、随机时延和丢包的分布式融合估计器.自动化学报, 2016, 42(7):1053-1064 http://www.aas.net.cn/CN/Y2016/V42/I7/1053Zhao Guo-Rong, Han Xu, Wan Bing, Yan Xin. A decentralized fusion estimator with stochastic sensor gain degradation, delays and data dropouts. Acta Automatica Sinica, 2016, 42(7):1053-1064 http://www.aas.net.cn/CN/Y2016/V42/I7/1053 [14] Ma J, Sun S L. Distributed fusion filter for networked stochastic uncertain systems with transmission delays and packet dropouts. Signal Processing, 2017, 130:268-278 doi: 10.1016/j.sigpro.2016.07.004 [15] Li N, Sun S L, Ma J. Multi-sensor distributed fusion filtering for networked systems with different delay and loss rates. Digital Signal Processing, 2014, 34:29-38 doi: 10.1016/j.dsp.2014.07.016 [16] Pang C Y, Sun S L. Fusion predictors for multisensor stochastic uncertain systems with missing measurements and unknown measurement disturbances. IEEE Sensors Journal, 2015, 15(8):4346-4354 doi: 10.1109/JSEN.2015.2416511 [17] Silva E I, Solis M A. An alternative look at the constant-gain Kalman filter for state estimation over erasure channels. IEEE Transactions on Automatic Control, 2013, 58(12):3259-3265 doi: 10.1109/TAC.2013.2263647 [18] 祁波, 孙书利.带未知通信干扰和丢包补偿的多传感器系统的融合估计.系统科学与数学, 2016, 36(8):1094-1106 http://www.cnki.com.cn/Article/CJFDTOTAL-SHJT201506025.htmQi Bo, Sun Shu-Li. Fusion estimation for multi-sensor systems with unknown communication disturbances and compensation of packet losses. Journal of Systems Science and Mathematical Sciences, 2016, 36(8):1094-1106 http://www.cnki.com.cn/Article/CJFDTOTAL-SHJT201506025.htm [19] Anderson B D O, Moore J B. Optimal Filtering. Englewood Cliffs, NJ, USA: Prentice-Hall, 1979. [20] Sun S L, Deng Z L. Multi-sensor optimal information fusion Kalman filter. Automatica, 2004, 40(6):1017-1023 doi: 10.1016/j.automatica.2004.01.014 [21] 徐宁寿.随机信号估计与系统控制.北京:北京工业大学出版社, 2001. 7-13Xu Ning-Shou. Stochastic Signal Estimation and System Control. Beijing:Beijing University of Technology Press, 2001. 7-13 -

 下载:
下载:



图(6)
计量
- 文章访问数: 2165
- HTML全文浏览量: 214
- PDF下载量: 631
- 被引次数: 0
