

-
摘要: 为满足新颖成像模式对卫星姿态快速机动或对规划姿态的高精度跟踪控制需求,本文针对金字塔构型控制力矩陀螺(Control moment gyroscopes,CMG)群与反作用飞轮为联合执行机构的挠性敏捷卫星,提出一种融合以Legendre伪谱法实现卫星姿态及CMG群框架角速度最优规划的前馈控制、以非线性模型预测控制(Nonlinear model predictive control,NMPC)实现最优轨迹反馈跟踪的复合控制方法.在前馈控制律设计中,充分考虑了CMG群的力矩输出能力、奇异性及振动抑制性能等约束,规划获得了最优的CMG群框架角速度、卫星的姿态角及角速度.在反馈控制律设计中,以飞轮输出力矩能力、姿态机动快速性及能量为约束,设计了具有滚动优化思想的跟踪算法,补偿由于初始状态及转动惯量偏差等带来的控制误差.研究结果表明,在转动惯量存在偏差情况下,本文的控制方法仍是有效的,且表现出较强的鲁棒性.Abstract: To satisfy the needs of novel imaging modes for attitude rapid maneuver and high precision tracking control, a control strategy combining feedforward and feedback control is proposed for flexible satellite with hybrid actuator (pyramid configuration control moment gyroscopes (CMG) and reaction flywheel). In the design of feedforward control, to fully consider the constraints, such as torque output capacity of CMG group, singularity and vibration suppression performance, a Legendre pseudospectral method which could plan the optimal satellite attitude and frame angle rate of CMG group is presented. In the design of feedback control, with the torque capacity of flywheel, attitude rapid maneuver and energy constraints being the cost function, a tracking control algorithm based on nonlinear model predictive control (NMPC) is given to compensate the error of initial state and rotational inertia. The results show that, in the case of inertia error, the proposed control method is effective and shows a strong robustness.
-
Key words:
- Agile satellite /
- rapid maneuver /
- hybrid actuator /
- trajectory optimization /
- moving horizon tracking
1) 本文责任编委 倪茂林 -
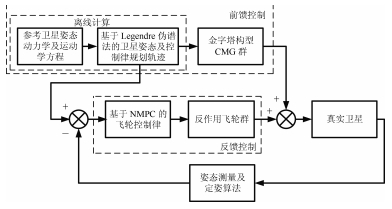
图 4 挠性敏捷卫星姿态控制方案框图
Fig. 4 Diagram of attitude control scheme for flexible agile satellite
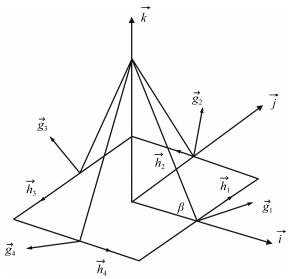
图 5 金字塔构型CMG群系统坐标系示意图
Fig. 5 Diagram of coordinate system for pyramid configuration CMG groups
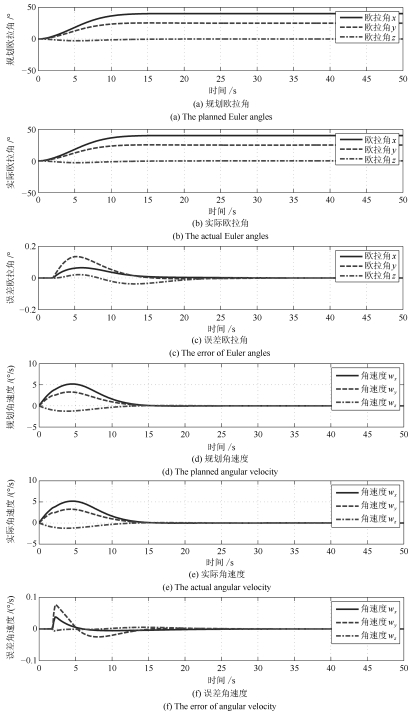
图 6 惯量匹配情况下的姿态大角度机动规划轨迹与实际轨迹曲线对比
Fig. 6 Comparison of planed trajectory and actual trajectory for attitude maneuver in the case of inertia matching
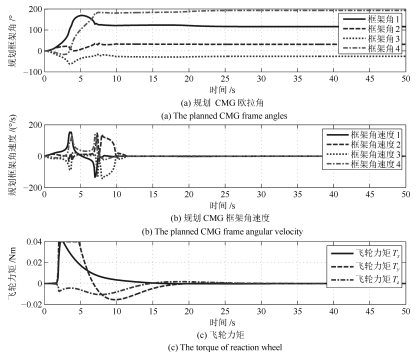
图 7 惯量匹配情况下的规划CMG框架角、角速度与实际飞轮控制力矩曲线
Fig. 7 Planed CMG frame angle, angular velocity and actual flywheel control torque curves in the case of inertia matching
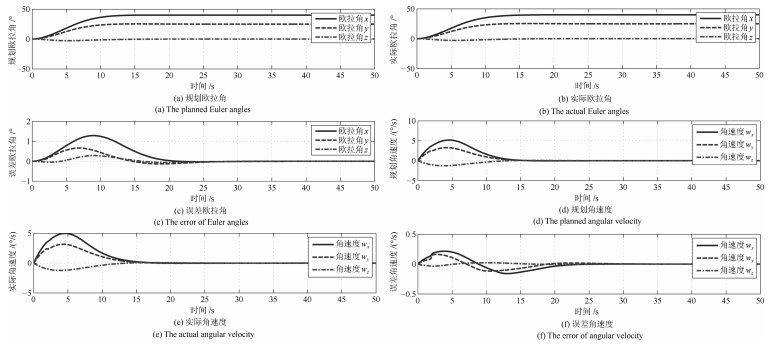
图 8 惯量5 %偏差情况下的姿态大角度机动规划轨迹与实际轨迹曲线对比
Fig. 8 Comparison of planed trajectory and actual trajectory for attitude maneuver with inertia 5 % deviation
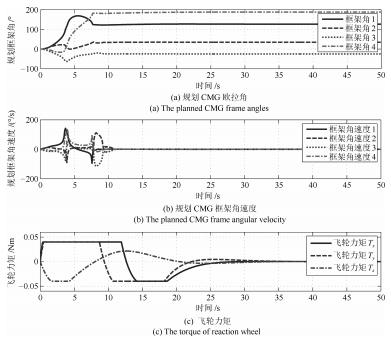
图 9 惯量5 %偏差情况下的规划CMG框架角、角速度与实际飞轮控制力矩曲线
Fig. 9 Planed CMG frame angle, angular velocity and actual flywheel control torque curves with inertia 5 % deviation
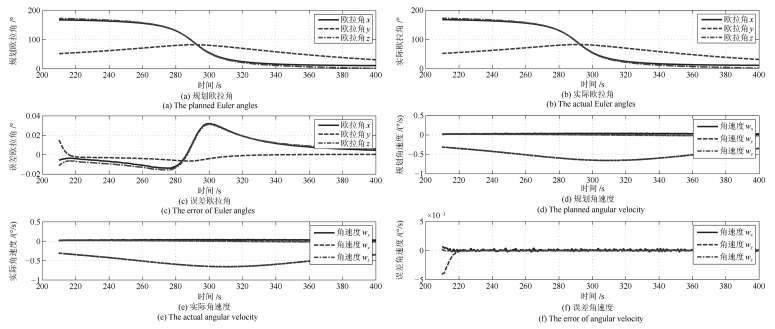
图 10 惯量匹配情况下的凝视成像姿态规划轨迹与实际轨迹曲线对比
Fig. 10 Comparison of planed trajectory and actual trajectory for staring imaging in the case of inertia matching
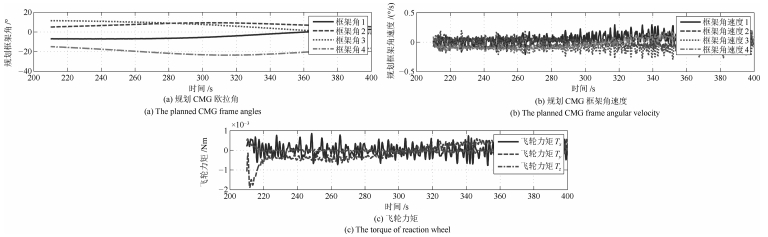
图 11 惯量匹配情况下的规划CMG框架角、角速度与实际飞轮控制力矩曲线
Fig. 11 Planed CMG frame angle, angular velocity and actual flywheel control torque curves in the case of inertia matching
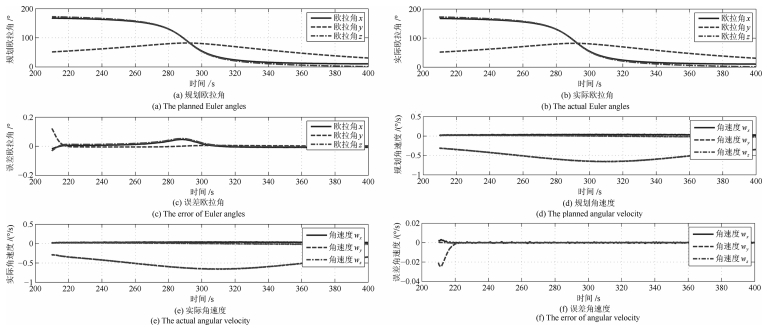
图 12 惯量10 %偏差情况下的凝视成像姿态规划轨迹与实际轨迹曲线对比
Fig. 12 Comparison of planed trajectory and actual trajectory for staring imaging with inertia 10 % deviation
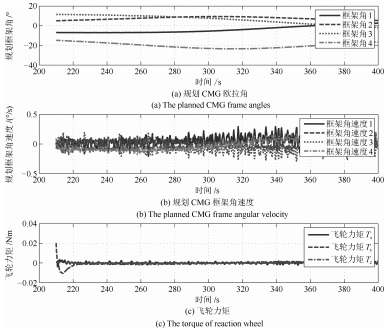
图 13 惯量10 %偏差情况下的规划CMG框架角、角速度与实际飞轮控制力矩曲线
Fig. 13 Planed CMG frame angle, angular velocity and actual flywheel control torque curves with inertia 10 % deviation
表 1 凝视成像过程中的姿态角及角速度约束
Table 1 Attitude angle and angular velocity constraints in staring imaging
过程约束 时间(s) 欧拉角$x\, (^\circ)$ 角速度$w_x\, (^\circ/\rm{s})$ 欧拉角$y\, (^\circ)$ 角速度$w_y\, (^\circ/\rm{s})$ 欧拉角$z\, (^\circ)$ 角速度$w_z\, (^\circ/\rm{s})$ 约束1 250 160.50 0.0297 66.27 –0.4677 163.00 0.0174 约束2 260 155.91 0.0350 70.75 –0.5141 157.61 0.0137 约束3 270 147.50 0.0377 75.40 –0.5590 148.50 0.0135 约束4 280 130.22 0.0391 79.71 –0.5952 130.40 0.0070 约束5 290 94.33 0.0376 82.07 –0.6304 93.91 0.0073 约束6 300 54.46 0.0380 80.19 –0.6499 53.12 0.0060 约束7 310 33.72 0.0351 75.39 –0.6599 31.53 0.0004 约束8 320 23.99 0.0385 69.64 –0.6493 20.96 –0.0015 约束9 330 18.81 0.0373 63.69 –0.6297 14.91 –0.0075 约束10 340 15.77 0.0326 57.87 –0.5962 11.02 –0.0070  下载: 导出CSV
下载: 导出CSV
-
[1] Tao J W, Yu W X. A preliminary study on imaging time difference among bands of WorldView-2 and its potential applications. In:Proceeding of the 2011 IEEE International Geoscience and Remote Sensing Symposium. Vancouver, Canada:IEEE, 2011. 198-200 [2] Leeghim H, Lee I H, Lee D H, Bang H, Park J O. Singularity avoidance of control moment gyros by predicted singularity robustness:ground experiment. IEEE Transactions on Control Systems Technology, 2009, 17(4):884-891 doi: 10.1109/TCST.2008.2011556 [3] 李传江, 郭延宁, 马广富.单框架控制力矩陀螺的奇异分析及操纵律设计.宇航学报, 2010, 31(10):2346-2453 doi: 10.3873/j.issn.1000-1328.2010.10.018Li Chuan-Jiang, Guo Yan-Ning, Ma Guang-Fu. Singularity analysis and steering law design for single-gimbal control moment gyroscopes. Journal of Astronautics, 2010, 31(10):2346-2453 doi: 10.3873/j.issn.1000-1328.2010.10.018 [4] 孙志远, 金光, 徐开, 张刘, 杨秀彬.基于力矩输出能力最优的SGCMG操纵律设计.空间科学学报, 2012, 32(1):113-122 doi: 10.11728/cjss2012.01.113Sun Zhi-Yuan, Jin-Guang, Xu Kai, Zhang Liu, Yang Xiu-Bin. Steering law design for SGCMG based on optimal output torque capability. Chinese Journal of Space Science, 2012, 32(1):113-122 doi: 10.11728/cjss2012.01.113 [5] Huntington G T. Advancement and analysis of a gauss pseudospectral transcription for optimal control[Ph. D. dissertation], Massachusetts Institute of Technology, USA, 2007. [6] 杨希祥, 张为华.基于Gauss伪谱法的固体运载火箭上升段轨迹快速优化研究.宇航学报, 2011, 32(1):15-21 http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201101004.htmYang Xi-Xiang, Zhang Wei-Hua. Rapid optimization of ascent trajectory for solid launch vehicles based on Gauss pseudospectral method. Journal of Astronautics, 2011, 32(1):15-21 http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201101004.htm [7] Sun C C, Wu S M, Chung H Y, Chang W J. Design of takagi-sugeno fuzzy region controller based on rule reduction, robust control, and switching concept. Journal of Dynamic Systems, Measurement, and Control, 2007, 129(2):163-170 doi: 10.1115/1.2431811 [8] 黄静, 李传江, 马广富, 刘刚.基于广义逆的欠驱动航天器姿态机动控制.自动化学报, 2013, 39(3):285-292 http://www.aas.net.cn/CN/abstract/abstract17802.shtmlHuang Jing, Li Chuan-Jiang, Ma Guang-Fu, Liu Gang. Generalised inversion based maneuver attitude control for underactuated spacecraft. Acta Automatica Sinica, 2013, 39(3):285-292 http://www.aas.net.cn/CN/abstract/abstract17802.shtml [9] 陈刚, 康兴无, 乔洋, 陈士橹.航天器相对大角度姿态跟踪非线性控制器设计.宇航学报, 2009, 32(2):556-559 http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB200902032.htmChen Gang, Kang Xing-Wu, Qiao Yang, Chen Shi-Lu. The nonlinear controller designing for spacecraft large angle attitude state tracking. Journal of Astronautics, 2009, 32(2):556-559 http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB200902032.htm [10] Dong C Y, Xu L J, Chen Y, Wang Q. Networked flexible spacecraft attitude maneuver based on adaptive fuzzy sliding mode control. Acta Astronautica, 2009, 65(11-12):1561-1570 doi: 10.1016/j.actaastro.2009.04.004 [11] Hu Q L, Cao J, Zhang Y Z. Robust backstepping sliding mode attitude tracking and vibration damping of flexible spacecraft with actuator dynamics. Journal of Aerospace Engineering, 2009, 22(2):139-152 doi: 10.1061/(ASCE)0893-1321(2009)22:2(139) [12] Yu S Y, Reble M, Chen H, Allgöwer F. Inherent robustness properties of quasi-infinite horizon nonlinear model predictive control. Automatica, 2014, 50(9):2269-2280 doi: 10.1016/j.automatica.2014.07.014 [13] 常琳, 金光, 范国伟, 徐开.基于terminal滑模控制的小卫星机动方法.光学精密工程, 2015, 23(2):485-496 http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201502023.htmChang Lin, Jin Guang, Fan Guo-Wei, Xu Kai. Small satellite maneuver based on terminal sliding mode control. Optics and Precision Engineering, 2015, 23(2):485-496 http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201502023.htm [14] Bernardini D, Bemporad A. Stabilizing model predictive control of stochastic constrained linear systems. IEEE Transactions on Automatic Control, 2012, 57(6):1468-1480 doi: 10.1109/TAC.2011.2176429 [15] Cannon M, Kouvaritakis B, Wu X J. Model predictive control for systems with stochastic multiplicative uncertainty and probabilistic constraints. Automatica, 2009, 45(1):167-172 doi: 10.1016/j.automatica.2008.06.017 [16] 范国伟, 常琳, 戴路, 徐开, 杨秀彬.敏捷卫星姿态机动的非线性模型预测控制.光学精密工程, 2015, 23(8):2318-2327 http://youxian.cnki.com.cn/yxdetail.aspx?filename=MOTO20170110007&dbname=CAPJ2015Fan Guo-Wei, Chang Lin, Dai Lu, Xu Kai, Yang Xiu-Bin. Nonlinear model predictive control of agile satellite attitude maneuver. Optics and Precision Engineering, 2015, 23(8):2318-2327 http://youxian.cnki.com.cn/yxdetail.aspx?filename=MOTO20170110007&dbname=CAPJ2015 [17] 孙光, 霍伟.卫星姿态直接自适应模糊预测控制.自动化学报, 2010, 36(8):1151-1159 http://www.aas.net.cn/CN/abstract/abstract17314.shtmlSun Guang, Huo Wei. Direct-adaptive fuzzy predictive control of satellite attitude. Acta Automatica Sinica, 2010, 36(8):1151-1159 http://www.aas.net.cn/CN/abstract/abstract17314.shtml -

 下载:
下载:

计量
- 文章访问数: 2778
- HTML全文浏览量: 307
- PDF下载量: 513
- 被引次数: 0
