

Degradation Modeling and Remaining Useful Life Prediction with Bivariate Time Scale
-
摘要: 基于退化建模的剩余寿命预测(Remaining useful life,RUL)是当前可靠性领域研究的热点.现有的退化模型都是针对单个时间尺度下的退化设备,缺少对设备性能变化与多个时间尺度相关的退化建模与剩余寿命预测方法.鉴于此,本文基于Wiener过程提出了一种双时间尺度随机退化建模与剩余寿命预测方法,用随机比例系数描述不同时间尺度之间的不确定关系,推导出丫首达时间意义下设备的双时间尺度剩余寿命分布,讨论了其与基于单时间尺度退化模型得到的剩余寿命分布之间的关系,并给出了基于历史退化数据的未知参数极大似然估计方法.最后,将所提方法应用到惯性平台关键器件陀螺仪的退化建模与剩余寿命预测中,验证了方法的有效性.Abstract: Degradation modeling based remaining useful life (RUL) prediction is currently a research hotspot in the field of reliability. However, almost all the existing models consider the degrading equipment with one time scale, and no particular approach has been developed for deteriorating equipment whose degradation process involves more than one time scale. To fill this gap, a bivariate-time-scale degradation model, in which the uncertain relationship between the two time scales is depicted through a stochastic proportional coefficient, is presented based on Wiener process. Under the concept of the first hitting time, a bivariate-time-scale RUL distribution is derived and its relationship with the RUL distribution under single time scale is discussed. Besides, a maximum likelihood estimation method is introduced to estimate unknown parameters using historical degradation data. A case study of degradation data from gyroscopes in an inertial platform demonstrates the effectiveness of the proposed method.1) 本文责任编委 姜斌
-
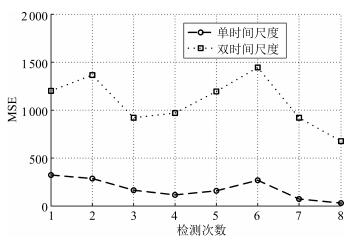
图 4 储存时间尺度下$M_1$和$M_2$下剩余寿命预测的MSE
Fig. 4 MSE comparison of $M_1$ and $M_2$ under time scale $t$

图 6 检测时间尺度下$M_1$和$M_2$下剩余寿命预测的MSE
Fig. 6 MSE comparison of $M_1$ and $M_2$ under time scale $\tau$
表 1 #3陀螺仪的模型参数估计结果
Table 1 Estimated parameters based on degradation path #3
时间尺度 $\lambda_0$ $\lambda_1$ $\lambda_2$ $\sigma_B$ $\sigma_W$ $\ell(\hat{\boldsymbol{\varphi}}|\boldsymbol{x})$ AIC $t$ -2.8959E-3 3.0662E-3 - 1.0845E-2 - 18.8689 -31.7378 $\tau$ -3.5932E-3 - 1.1095E-2 - 1.1251E-2 23.4324 -40.8648 $[t, \tau]$ 3.6148E-3 9.5126E-5 1.1440E-2 1.8146E-5 5.5160E-3 24.9530 -39.9060  下载: 导出CSV
下载: 导出CSV
-
[1] 周东华, 魏慕恒, 司小胜.工业过程异常检测、寿命预测与维修决策的研究进展.自动化学报, 2013, 39(6):711-722 http://www.aas.net.cn/CN/abstract/abstract18097.shtmlZhou Dong-Hua, Wei Mu-Heng, Si Xiao-Sheng. A survey on anomaly detection, life prediction and maintenance decision for industrial processes. Acta Automatica Sinica, 2013, 39(6):711-722 http://www.aas.net.cn/CN/abstract/abstract18097.shtml [2] 司小胜, 胡昌华, 周东华.带测量误差的非线性退化过程建模与剩余寿命估计.自动化学报, 2013, 39(5):530-541 http://www.aas.net.cn/CN/abstract/abstract17879.shtmlSi Xiao-Sheng, Hu Chang-Hua, Zhou Dong-Hua. Nonlinear degradation process modeling and remaining useful life estimation subject to measurement error. Acta Automatica Sinica, 2013, 39(5):530-541 http://www.aas.net.cn/CN/abstract/abstract17879.shtml [3] 李鑫, 吕琛, 王自力, 陶小创.考虑退化模式动态转移的健康状态自适应预测.自动化学报, 2014, 40(9):1889-1895 http://www.aas.net.cn/CN/abstract/abstract18458.shtmlLi Xin, Lv Chen, Wang Zi-Li, Tao Xiao-Chuang. Selfadaptive health condition prediction considering dynamic transfer of degradation mode. Acta Automatica Sinica, 2014, 40(9):1889-1895 http://www.aas.net.cn/CN/abstract/abstract18458.shtml [4] Pecht M G. Prognostics and Health Management of Electronics. New Jersey:John Wiley, 2008. [5] Ye Z S, Xie M. Stochastic modelling and analysis of degradation for highly reliable products. Applied Stochastic Models in Business and Industry, 2015, 31(1):16-32 doi: 10.1002/asmb.2063 [6] Ye Z S, Chen N. The inverse Gaussian process as a degradation model. Technometrics, 2014, 56(3):302-311 doi: 10.1080/00401706.2013.830074 [7] Le Son K, Fouladirad M, Barros A. Remaining useful lifetime estimation and noisy Gamma deterioration process. Reliability Engineering and System Safety, 2016, 149:76-87 doi: 10.1016/j.ress.2015.12.016 [8] Ye Z S, Wang Y, Tsui K L, Pecht M. Degradation data analysis using Wiener processes with measurement errors. IEEE Transactions on Reliability, 2013, 62(4):772-780 doi: 10.1109/TR.2013.2284733 [9] Li N P, Lei Y G, Lin J, Ding S X. An improved exponential model for predicting remaining useful life of rolling element bearings. IEEE Transactions on Industrial Electronics, 2015, 62(12):7762-7773 doi: 10.1109/TIE.2015.2455055 [10] Zhou Q, Son J B, Zhou S Y, Mao X F, Salman M. Remaining useful life prediction of individual units subject to hard failure. IIE Transactions, 2014, 46(10):1017-1030 doi: 10.1080/0740817X.2013.876126 [11] Son J B, Zhou Q, Zhou S Y, Mao X F, Salman M. Evaluation and comparison of mixed effects model based prognosis for hard failure. IEEE Transactions on Reliability, 2013, 62(2):379-394 doi: 10.1109/TR.2013.2259205 [12] Lawless J, Hu J, Cao J. Methods for the estimation of failure distributions and rates from automobile warranty data. Lifetime Data Analysis, 1995, 1(3):227-240 doi: 10.1007/BF00985758 [13] Lawless J F, Crowder M J, Lee K A. Analysis of reliability and warranty claims in products with age and usage scales. Technometrics, 2009, 51(1):14-24 doi: 10.1198/TECH.2009.0002 [14] Singpurwalla N D, Wilson S P. Failure models indexed by two scales. Advances in Applied Probability, 1998, 30(4):1058-1072 doi: 10.1017/S000186780000879X [15] Wang Z Q, Hu C H, Wang W B, Zhou Z J, Si X S. A case study of remaining storage life prediction using stochastic filtering with the influence of condition monitoring. Reliability Engineering and System Safety, 2014, 132:186-195 doi: 10.1016/j.ress.2014.07.015 [16] Duchesne T, Lawless J. Alternative time scales and failure time models. Lifetime Data Analysis, 2000, 6(2):157-179 doi: 10.1023/A:1009616111968 [17] 王小林, 郭波, 程志君.融合多源信息的维纳过程性能退化产品的可靠性评估.电子学报, 2012, 40(5):977-982. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201205018.htmWang Xiao-Lin, Guo Bo, Cheng Zhi-Jun. Reliability assessment of products with Wiener process degradation by fusing multiple information. Acta Electronica Sinica, 2012, 40(5):977-982 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201205018.htm [18] 彭宝华, 周经伦, 冯静, 刘学敏.金属化膜脉冲电容器剩余寿命预测力法研究.电子学报, 2011, 39(11):2674-2679 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201111033.htmPeng Bao-Hua, Zhou Jing-Lun, Feng Jing, Liu Xue-Min. Residual lifetime prediction of metallized film pulse capacitors. Acta Electronica Sinica, 2011, 39(11):2674-2679 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201111033.htm [19] Si X S, Zhou D H. A generalized result for degradation model-based reliability estimation. IEEE Transactions on Automation Science and Engineering, 2014, 11(2):632-637 doi: 10.1109/TASE.2013.2260740 [20] Gebraeel N. Sensory-updated residual life distributions for components with exponential degradation patterns. IEEE Transactions on Automation Science and Engineering, 2006, 3(4):382-393 doi: 10.1109/TASE.2006.876609 [21] Whitmore G A, Schenkelberg F. Modelling accelerated degradation data using Wiener diffusion with a time scale transformation. Lifetime Data Analysis, 1997, 3(1):27-45 doi: 10.1023/A:1009664101413 [22] Ye Z S, Murthy D N P, Xie M, Tang L C. Optimal burn-in for repairable products sold with a two-dimensional warranty. IIE Transactions, 2013, 45(2):164-176 doi: 10.1080/0740817X.2012.677573 [23] Ye Z S, Chen N, Shen Y. A new class of Wiener process models for degradation analysis. Reliability Engineering and System Safety, 2015, 139:58-67 doi: 10.1016/j.ress.2015.02.005 [24] Folks J L, Chhikara R S. The inverse Gaussian distribution and its statistical application-a review. Journal of the Royal Statistical Society Series B, 1978, 40(3):263-289. http://www.jstor.org/stable/2984691 [25] 杜党波, 张伟, 胡昌华, 周志杰, 司小胜, 张建勋.含缺失数据的小波-卡尔曼滤波故障预测方法.自动化学报, 2014, 40(10):2115-2125 http://www.aas.net.cn/CN/abstract/abstract18486.shtmlDu Dang-Bo, Zhang Wei, Hu Chang-Hua, Zhou Zhi-Jie, Si Xiao-Sheng, Zhang Jian-Xun. A failure prognosis method based on wavelet-Kalman filtering with missing data. Acta Automatica Sinica, 2014, 40(10):2115-2125 http://www.aas.net.cn/CN/abstract/abstract18486.shtml -

 下载:
下载:


图(6) / 表(1)
计量
- 文章访问数: 2083
- HTML全文浏览量: 605
- PDF下载量: 581
- 被引次数: 0
