

Comprehensive Fault Diagnosis of Shaft Furnace Roasting Processes Using Simplified Concurrent Projection to Latent Structures
-
摘要: 竖炉焙烧过程因运行条件异常变化或操作不当会造成上火、冒火、过还原和欠还原等运行故障.这些故障直接影响过程运行安全和产品质量(比如,磁选管回收率),但难以采用基于模型和基于知识的方法建模故障与产品质量的关系,以及诊断故障变量.针对上述问题,本文提出数据驱动的基于并发潜结构映射(Concurrent projection to latent structures,CPLS)的竖炉焙烧过程综合故障诊断方法.首先,将并发潜结构映射分解的过程变量共有子空间与残差空间精简合并来建立磁选管回收率相关的过程变化空间,提出基于精简并发潜结构映射模型的竖炉焙烧过程综合监控方法;接下来,定义相应的重构贡献图并与竖炉焙烧过程相结合,提出CPLS精简重构贡献方法用于竖炉焙烧过程故障变量诊断;最后,利用竖炉焙烧过程半实物仿真平台采集的数据进行实验研究,结果表明所提方法不仅可以诊断出质量相关的故障,而且可诊断出回路设定值之外的故障变量.Abstract: Operational faults of shaft furnace roasting processes can appear when operational conditions change abnormally or operators do not react properly or timely. Typical operational faults, including fire-emitting, flame-out, under-reduction and over-reduction, are highly related to process safety and product quality, e.g., magnetic tube recovery rate (MTRR). Fault diagnosis of shaft furnace roasting processes deserves more attentions. However, it is difficult to apply model-based or knowledge-based fault diagnosis methods. In particular, it is difficult to model the relations between fault and product quality. In this paper data-driven concurrent projection to latent structures (CPLS) based fault diagnosis is developed for shaft furnace roasting processes. First, a CPLS based comprehensive monitoring method for shaft furnace roasting processes is proposed by combining co-variation and residual of process spaces of concurrent projection to latent structures into a simplified MTRR-relevant process-variation space. Secondly, a corresponding simplified reconstruction-based contribution method is proposed and used to pinpoint the faulty variable. Finally, the proposed methods are verified using the data collected from a hardware-in-loop simulation platform. The results demonstrate that the quality-relevant faults as well as faulty variables are successfully diagnosed.
-
-
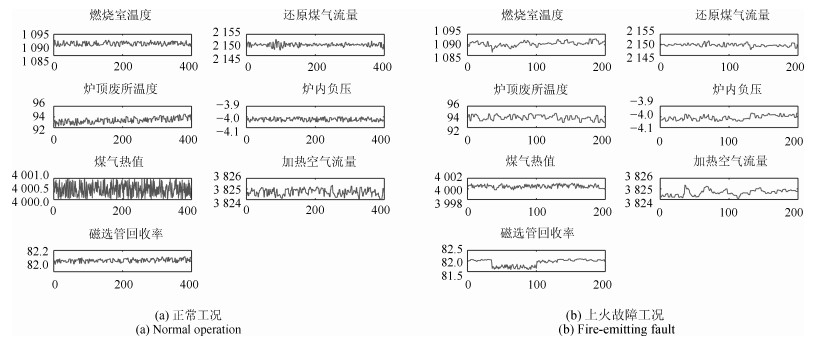
图 2 竖炉焙烧过程正常工况与上火故障工况数据
Fig. 2 Data collected from shaft furnace roasting process under normal operation and fire-emitting fault
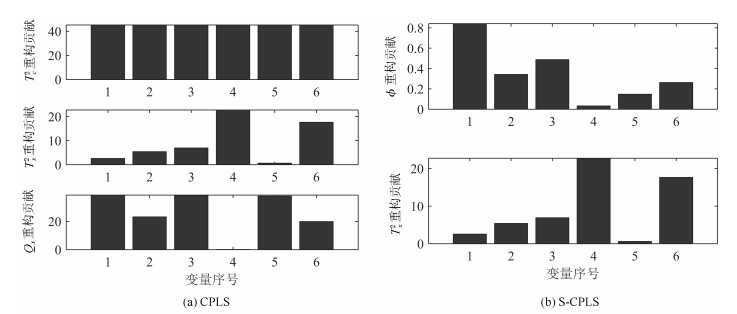
图 5 上火故障重构贡献诊断结果
Fig. 5 Reconstruction contribution based fault diagnosis results for fire-emitting fault
表 1 竖炉焙烧过程统计指标及其控制限[12]
Table 1 The statistics and control limits for shaft furnace roasting processes[12]
统计指标 控制限 $\begin{array}{l} T_c^2 ={{\pmb t}}_c^{\rm T} {{\pmb \Lambda }}_c^{-1} {{\pmb t}}_c= \\ \quad \, \boldsymbol{x}^{\rm T}{{\pmb R}}_c {{\pmb \Lambda }}_c^{-1} {{\pmb R}}_c^{\rm T} \boldsymbol{x} \\ \end{array}$ $\tau _c^2 =\frac{l_c (n^2-1)}{n(n-l_c)}F_{l_c, n-l_c, \alpha } $ $\begin{array}{l} T_x^2 ={{\pmb t}}_x^{\rm T} {{\pmb \Lambda }}_x^{-1} {{\pmb t}}_x =\\ \quad \, \boldsymbol{x}^{\rm T}{{\pmb P}}_x {{\pmb \Lambda }}_x^{-1} {{\pmb P}}_x^{\rm T} \boldsymbol{x} \\ \end{array}$ $\tau _x^2 =\frac{l_x (n^2-1)}{n(n-l_x)}F_{l_x, n-l_x, \alpha } $ $\begin{array}{l} T_y^2 ={{\pmb t}}_y^{\rm T} {{\pmb \Lambda }}_y^{-1} {{\pmb t}}_y =\\ \quad \, {{\tilde {\pmb y}}}_c^{\rm T} {{\pmb P}}_y {{\pmb \Lambda }}_y^{-1} {{\pmb P}}_y^{\rm T} {{\tilde{ \boldsymbol{y}}}}_c \\ \end{array}$ $\tau _y^2 =\frac{l_y (n^2-1)}{n(n-l_y)}F_{l_y, n-l_y, \alpha} $ $\begin{array}{l} Q_x =\left\| {{{\tilde{ \boldsymbol{x}}}}} \right\|^{{2}} =\\ \quad \, \boldsymbol{x}^{\rm T}\left({{{\pmb I-P}}_x {{\pmb P}}_x^{\rm T} } \right)\boldsymbol{x} \\ \end{array}$ $\delta _x^2 =g_x \cdot \chi _{h_x, \alpha }^2 $ $\begin{array}{l} Q_y =\left\| {{{\tilde {\boldsymbol{y}}}}} \right\|^{{2}} =\\ \quad \, {{\tilde {\boldsymbol{y}}}}_c^{{\rm T}} \left({{{\pmb I-P}}_y {{\pmb P}}_y^{{\rm T}} } \right){{\tilde {\boldsymbol{y}}}}_c \\ \end{array}$ $\delta _y^2 =g_y \cdot \chi _{h_y, \alpha }^2 $  下载: 导出CSV
下载: 导出CSV
-
[1] 柴天佑, 丁进良, 王宏, 苏春翌.复杂工业过程运行的混合智能优化控制方法.自动化学报, 2008, 34(5):505-515 http://www.aas.net.cn/CN/abstract/abstract13476.shtmlChai Tian-You, Ding Jin-Liang, Wang Hong, Su Chun-Yi. Hybrid intelligent optimal control method for operation of complex industrial processes. Acta Automatica Sinica, 2008, 34 (5):505-515 http://www.aas.net.cn/CN/abstract/abstract13476.shtml [2] Chai T Y, Ding J L, Wu F H. Hybrid intelligent control for optimal operation of shaft furnace roasting process. Control Engineering Practice, 2011, 19 (3):264-275 doi: 10.1016/j.conengprac.2010.05.002 [3] 吴峰华, 丁进良, 岳恒, 柴天佑.竖炉焙烧过程智能故障诊断系统.南京航空航天大学学报, 2006, 38 (S1):91-94 http://d.wanfangdata.com.cn/Periodical/njhkht2006z1023Wu Feng-Hua, Ding Jin-Liang, Yue Heng, Chai Tian-You. Intelligent fault diagnosis system for roasting process of shaft furnace. Journal of Nanjing University of Aeronautics & Astronautics, 2006, 38 (S1):91-94 http://d.wanfangdata.com.cn/Periodical/njhkht2006z1023 [4] 严爱军, 王普, 曾宇.竖炉燃烧过程智能故障预报系统.化工学报, 2008, 59 (7):1768-1772 http://www.oalib.com/paper/4208380Yan Ai-Jun, Wang Pu, Zeng Yu. Intelligent fault prediction system of combustion process in shaft furnace. Journal of Chemical Industry and Engineering (China), 2008, 59 (7):1768-1772 http://www.oalib.com/paper/4208380 [5] Lu X L, Liu Q, Chai T Y, Qin S J. Data-driven fault diagnosis of shaft furnace roasting processes using reconstruction and reconstruction-based contribution approaches. IFAC Proceedings Volumes, 2014, 47 (3):8897-8902 doi: 10.3182/20140824-6-ZA-1003.01188 [6] Qin S J. Survey on data-driven industrial process monitoring and diagnosis. Annual Reviews in Control, 2012, 36 (2):220-234 doi: 10.1016/j.arcontrol.2012.09.004 [7] 文成林, 吕菲亚, 包哲静, 刘妹琴.基于数据驱动的微小故障诊断方法综述.自动化学报, 2016, 42 (9):1285-1299 http://www.aas.net.cn/CN/abstract/abstract18918.shtmlWen Cheng-Lin, Lv Fei-Ya, Bao Zhe-Jing, Liu Mei-Qin. A review of data driven-based incipient fault diagnosis. Acta Automatica Sinica, 2016, 42 (9):1285-1299 http://www.aas.net.cn/CN/abstract/abstract18918.shtml [8] MacGregor J F, Kourti T. Statistical process control of multivariate processes. Control Engineering Practice, 1995, 3 (3):403-414 doi: 10.1016/0967-0661(95)00014-L [9] Zhou D H, Li G, Qin S J. Total projection to latent structures for process monitoring. AIChE Journal, 2010, 56 (1):168-178 doi: 10.1002/aic.11977/abstract [10] Li G, Qin S J, Ji Y D, Zhou D H. Total PLS based contribution plots for fault diagnosis. Acta Automatica Sinica, 2009, 35 (6):759-765 http://or.nsfc.gov.cn/bitstream/00001903-5/71521/1/1000004259143.pdf [11] Li G, Qin S J, Zhou D H. Geometric properties of partial least squares for process monitoring. Automatica, 2010, 46 (1):204-210 doi: 10.1016/j.automatica.2009.10.030 [12] Qin S J, Zheng Y Y. Quality-relevant and process-relevant fault monitoring with concurrent projection to latent structures. AIChE Journal, 2013, 59 (2):496-504 doi: 10.1002/aic.v59.2 [13] Liu Q, Qin S J, Chai T Y. Multiblock concurrent PLS for decentralized monitoring of continuous annealing processes. IEEE Transactions on Industrial Electronics, 2014, 61 (11):6429-6437 doi: 10.1109/TIE.2014.2303781 [14] 曹玉苹, 黄琳哲, 田学民.一种基于DIOCVA的过程监控方法.自动化学报, 2015, 41 (12):2072-2080 http://www.aas.net.cn/CN/abstract/abstract18780.shtmlCao Yu-Ping, Huang Lin-Zhe, Tian Xue-Min. A process monitoring method using dynamic input-output canonical variate analysis. Acta Automatica Sinica, 2015, 41 (12):2072-2080 http://www.aas.net.cn/CN/abstract/abstract18780.shtml [15] Zhu Q Q, Liu Q, Qin S J. Concurrent canonical correlation analysis modeling for quality-relevant monitoring. IFAC-PapersOnLine, 2016, 49 (7):1044-1049 doi: 10.1016/j.ifacol.2016.07.340 [16] Dong Y N, Qin S J. Dynamic-inner partial least squares for dynamic data modeling. IFAC-PapersOnLine, 2015, 48 (8):117-122 doi: 10.1016/j.ifacol.2015.08.167 [17] 刘强, 秦泗钊.过程工业大数据建模研究展望.自动化学报, 2016, 42(2):161-171 http://www.aas.net.cn/CN/abstract/abstract18807.shtmlLiu Qiang, Qin S J. Perspectives on big data modeling of process industries. Acta Automatica Sinica, 2016, 42 (2):161-171 http://www.aas.net.cn/CN/abstract/abstract18807.shtml [18] 严爱军, 柴天佑.磁选管回收率智能混合预报方法.信息与控制, 2005, 34 (6):759-764 http://d.wanfangdata.com.cn/Periodical/xxykz200506024Yan Ai-Jun, Chai Tian-You. Intelligent hybrid prediction method of magnetic tube recovery rate. Information and Control, 2005, 34 (6):759-764 http://d.wanfangdata.com.cn/Periodical/xxykz200506024 [19] Yue H H, Qin S J. Reconstruction-based fault identification using a combined index. Industrial & Engineering Chemistry Research, 2001, 40 (20):4403-4414 doi: 10.1021/ie000141%2B [20] Box G E P. Some theorems on quadratic forms applied in the study of analysis of variance problems, I. effect of inequality of variance in the one-way classification. The Annals of Mathematical Statistics, 1954, 25 (2):290-302 doi: 10.1214/aoms/1177728786 [21] Alcala C F, Qin S J. Reconstruction-based contribution for process monitoring. Automatica, 2009, 45 (7):1593-1600 doi: 10.1016/j.automatica.2009.02.027 [22] 周平, 代伟, 柴天佑.竖炉焙烧过程运行优化控制系统的开发及实验研究.控制理论与应用, 2012, 29 (12):1565-1572 http://www.doc88.com/p-9979653061816.htmlZhou Ping, Dai Wei, Chai Tian-You. Exploration of operational optimization control system for shaft furnace roasting process and its experiment study. Control Theory & Applications, 2012, 29 (12):1565-1572 http://www.doc88.com/p-9979653061816.html 期刊类型引用(29)
1. 李倩,聂简,黄鸿殿,孔庆宇,奔粤阳. 基于大脑海马认知机理的主从式AUV协同定位方法. 中国惯性技术学报. 2024(01): 27-33 .  百度学术
百度学术2. 游雄,李科,田江鹏,杨剑,余岸竹,贾奋励. 机器地图信息加工模型. 武汉大学学报(信息科学版). 2024(04): 516-526 . 百度学术3. 高昊,王仁茂. 基于类脑仿生的环境感知技术. 舰船电子对抗. 2024(05): 42-46+55 . 百度学术4. 陈荟慧,钟委钊. 基于人机协作的高质量城市图像采集方法. 应用科学学报. 2023(05): 801-814 . 百度学术5. 朱祥维,沈丹,肖凯,马岳鑫,廖祥,古富强,余芳文,高柯夫,刘经南. 类脑导航的机理、算法、实现与展望. 航空学报. 2023(19): 6-38 . 百度学术6. 于乃功,廖诣深. 基于鼠脑内嗅—海马认知机制的移动机器人空间定位模型. 生物医学工程学杂志. 2022(02): 217-227 . 百度学术7. 刘溢,阳加远,张驰. 一种基于RTX的移动机器人实时控制平台. 电子技术与软件工程. 2022(08): 169-172 . 百度学术8. 于子航,王改云. 基于路径积分强化的机器人目标导向运动控制. 计算机仿真. 2022(07): 412-415+516 . 百度学术9. 董卫华,刘毅龙,黑巧松,杨天宇. 泛地图空间认知理论与方法研究框架. 武汉大学学报(信息科学版). 2022(12): 2007-2014 . 百度学术10. 阮晓钢,李鹏,朱晓庆,刘鹏飞. 基于目标导向行为和空间拓扑记忆的视觉导航方法. 计算机学报. 2021(03): 594-608 . 百度学术11. 赵辰豪,吴德伟,韩昆,代传金. 无环境信息下多尺度网格细胞群空间表征模型. 系统工程与电子技术. 2021(03): 814-822 . 百度学术12. 阮晓钢,柴洁,武悦,张晓平,黄静. 基于海马体位置细胞的认知地图构建与导航. 自动化学报. 2021(03): 666-677 . 本站查看13. 冀俊忠,刘金铎,邹爱笑,杨翠翠. 一种融合多源信息的脑效应连接网络蚁群学习算法. 自动化学报. 2021(04): 864-881 . 本站查看14. 万刚,武易天. 地图空间认知的数学基础. 测绘学报. 2021(06): 726-738 . 百度学术15. 洪涛,史涛,任红格. 一种改进型RatSLAM算法构建认知地图的研究. 现代计算机. 2021(21): 47-52 . 百度学术16. 韩昆,吴德伟,来磊. 类脑导航中基于差分Hebbian学习的网格细胞构建模型. 系统工程与电子技术. 2020(03): 674-679 . 百度学术17. 黄宜庆,王正刚,王徽,葛愿. 基于边缘梯度算法的多移动机器人协作地图构建. 信息与控制. 2020(01): 62-68 . 百度学术18. 于乃功,廖诣深,郑相国. 一种基于海马位置细胞选择机制的空间认知模型. 生物医学工程学杂志. 2020(01): 27-37 . 百度学术19. 胡小平,毛军,范晨,张礼廉,何晓峰,韩国良,范颖. 仿生导航技术综述. 导航定位与授时. 2020(04): 1-10 . 百度学术20. 于乃功,冯慧,廖诣深,郑相国. 一种基于感知速度与感知角度的网格野计算模型. 生物医学工程学杂志. 2020(05): 863-874 . 百度学术21. 晁丽君,熊智,杨闯,华冰,王雅婷,刘建业. 无人飞行器三维类脑SLAM自主导航方法. 飞控与探测. 2020(05): 35-43 . 百度学术22. 张孝伍. 图上的概率分布及位置方向信息的表征方法. 青岛理工大学学报. 2019(01): 113-121 . 百度学术23. 方略,何洪军. 基于鼠脑海马位置细胞与Q学习面向目标导航. 生物信息学. 2019(01): 31-38 . 百度学术24. 王均,凌有铸,王静. 基于特征融合的仿生SLAM算法研究. 安徽工程大学学报. 2019(02): 26-33 . 百度学术25. 刘建业,杨闯,熊智,赖际舟,熊骏. 无人机类脑吸引子神经网络导航技术. 导航定位与授时. 2019(05): 52-60 . 百度学术26. 韩昆,吴德伟,来磊,杨林. 自主导航条件下网格细胞放电模型. 电子科技大学学报. 2019(05): 711-716 . 百度学术27. 丛明,邹强,刘冬,杜宇. 定位细胞认知机理启发的机器人导航研究综述. 机械工程学报. 2019(23): 1-12 . 百度学术28. 邹强,丛明,刘冬,杜宇. 仿鼠脑海马的机器人地图构建与路径规划方法. 华中科技大学学报(自然科学版). 2018(12): 83-88 . 百度学术29. 吴德伟,何晶,韩昆,李卉. 无人作战平台认知导航及其类脑实现思想. 空军工程大学学报(自然科学版). 2018(06): 33-38 . 百度学术其他类型引用(29)
-


图(5) / 表(1)
计量
- 文章访问数: 2049
- HTML全文浏览量: 165
- PDF下载量: 604
- 被引次数: 58
