

Generalized Synchronization and System Parameters Identification BetweenTwo Different Complex Networks
-
摘要: 本文实现复杂网络未知系统参数的识别.针对系统未知参数,提出基于广义同步(Generalized synchronization,GS)的参数识别方法.该方法基于Babalat引理,利用Lyapunov稳定性理论,构造另一个具有不同拓扑结构和动力学方程的网络,并设计有效的自适应控制器,实现具有耦合时滞两个不同网络的广义同步,同时准确识别未知参数.与基于完全同步的参数识别方法相比,该方法能够构造低维的系统去识别高维系统的参数.数值实验验证了算法的有效性.Abstract: This paper proposes a method to identify system unknown parameters of complex network. Aimed at system unknown parameters, a method using generalized synchronization (GS) is proposed. This method bases on Barbalat lemma and Lyapunov stability scheme and contructs an auxiliary complex network with different topologies and dynamics. Some adaptive controllers are also designed to identify system parameters upon GS with delay coupling. Compared to the method based on complete outer synchronization, the proposed method can construct simple and low dimensional dynamics to identify the parameters of high dimensional dynamics. Numerical simulations are provided to show the effectiveness of the proposed method.
-
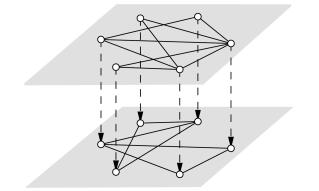
图 1 驱动和响应网络模型
(虚线表示网络之间的连边)
Fig. 1 Model of drive network and response network
(dashed links as interlayer links between networks)
-
[1] Watts D J, Strogatz S H. Collective dynamics of 'small-world' networks. Nature, 1998, 393 (6684):440-442 doi: 10.1038/30918 [2] Barabási A L, Albert R. Emergence of scaling in random networks. Science, 1999, 286 (5439):509-512 doi: 10.1126/science.286.5439.509 [3] Wang X F, Chen G R. Synchronization in small-world dynamical networks. International Journal of Bifurcation & Chaos, 2002, 12 (1):187-192 https://www.researchgate.net/publication/220273228_Synchronization_in_Small-World_Dynamical_Networks [4] Nishikawa T, Motter A E, Lai Y C, Hoppensteadt F C. Heterogeneity in oscillator networks:are smaller worlds easier to synchronize? Physical Review Letters, 2003, 91 (1):014101 doi: 10.1103/PhysRevLett.91.014101 [5] Motter A E, Zhou C S, Kurths J. Enhancing complex-network synchronization. Europhysics Letters, 2005, 69 (3):334-340 doi: 10.1209/epl/i2004-10365-4 [6] Arenas A, Díaz-Guilera A, Kurths J, Moreno Y, Zhou C S. Synchronization in complex networks. Physics Reports, 2008, 469 (3):93-153 doi: 10.1016/j.physrep.2008.09.002 [7] 邓立为, 宋申民.基于输出反馈滑模控制的分数阶超混沌系统同步.自动化学报, 2014, 40 (11):2420-2427 http://www.aas.net.cn/CN/abstract/abstract18518.shtmlDeng Li-Wei, Song Shen-Min. Synchronization of fractional order hyperchaotic systems based on output feedback sliding mode control. Acta Automatica Sinica, 2014, 40 (11):2420-2427 http://www.aas.net.cn/CN/abstract/abstract18518.shtml [8] 杜洪越, 孙琬双, 胡革, 齐丽华.两个分数阶复杂动态网络的函数投影同步.自动化学报, 2016, 42 (2):226-234 http://www.aas.net.cn/CN/abstract/abstract18812.shtmlDu Hong-Yue, Sun Wan-Shuang, Hu Ge, Qi Li-Hua. Function projective synchronization of two fractional-order complex dynamical networks. Acta Automatica Sinica, 2016, 42 (2):226-234 http://www.aas.net.cn/CN/abstract/abstract18812.shtml [9] 陈冀, 陈典发, 宋敏.复杂网络结构下异质性银行系统稳定性研究.系统工程学报, 2014, 29 (2):171-181 http://www.cnki.com.cn/Article/CJFDTOTAL-XTGC201402004.htmChen Ji, Chen Dian-Fa, Song Min. Heterogenerous bank system stability research under complex networks structure. Journal of Systems Engineering, 2014, 29 (2):171-181 http://www.cnki.com.cn/Article/CJFDTOTAL-XTGC201402004.htm [10] Wang W X, Yang R, Lai Y C, Kovanis V, Grebogi C. Predicting catastrophes in nonlinear dynamical systems by compressive sensing. Physical Review Letters, 2011, 106 (15):154101 doi: 10.1103/PhysRevLett.106.154101 [11] Su R Q, Ni X, Wang W X, Lai Y C. Forecasting synchronizability of complex networks from data. Physical Review E, 2012, 85 (5):056220 doi: 10.1103/PhysRevE.85.056220 [12] Wu X Q. Synchronization-based topology identification of weighted general complex dynamical networks with time-varying coupling delay. Physica A, 2008, 387 (4):997-1008 doi: 10.1016/j.physa.2007.10.030 [13] Zhou J, Lu J A. Topology identification of weighted complex dynamical networks. Physica A, 2007, 386 (1):481-491 doi: 10.1016/j.physa.2007.07.050 [14] Liu H, Lu J A, Lü J H, Hill D J. Structure identification of uncertain general complex dynamical networks with time delay. Automatica, 2009, 45 (8):1799-1807 doi: 10.1016/j.automatica.2009.03.022 [15] Zhao J C, Li Q, Lu J A, Jiang Z P. Topology identification of complex dynamical networks. Chaos, 2010, 20 (2):023119 doi: 10.1063/1.3421947 [16] Mei J, Jiang M H, Wang J. Finite-time structure identification and synchronization of drive-response systems with uncertain parameter. Communications in Nonlinear Science & Numerical Simulation, 2013, 18 (4):999-1015 https://www.researchgate.net/publication/257448774_Finite-time_structure_identification_and_synchronization_of_drive-response_systems_with_uncertain_parameter [17] Wu X Q, Zheng W X, Zhou J. Generalized outer synchronization between complex dynamical networks. Chaos, 2009, 19 (1):013109 doi: 10.1063/1.3072787 [18] Wu X J, Lu H T. Generalized function projective (lag, anticipated and complete) synchronization between two different complex networks with nonidentical nodes. Communications in Nonlinear Science & Numerical Simulation, 2012, 17 (7):3005-3021 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZNXX201012009018.htm [19] Wu Y Q, Li C P, Wu Y J, Kurths J. Generalized synchronization between two different complex networks. Communications in Nonlinear Science & Numerical Simulation, 2012, 17 (1):349-355 [20] Zhang S N, Wu X Q, Lu J A, Feng H, Lü J H. Recovering structures of complex dynamical networks based on generalized outer synchronization. IEEE Transactions on Circuits and Systems Ⅰ:Regular Papers, 2014, 61 (11):3216-3224 doi: 10.1109/TCSI.2014.2334951 [21] 王健安.时变时滞耦合两个不同复杂网络的自适应广义同步.物理学报, 2012, 61 (2):020509 http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201202022.htmWang Jian-An. Adaptive generalized synchronization between two different complex networks with time-varying delay coupling. Acta Physica Sinica, 2012, 61 (2):020509 http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201202022.htm [22] 徐君群, 张建雄, 庞明宝. 2个时滞复杂动态网络的广义同步.天津大学学报 (自然科学与工程技术版), 2014, 47 (1):81-85 http://www.cnki.com.cn/Article/CJFDTOTAL-TJDX201401014.htmXu Jun-Qun, Zhang Jian-Xiong, Pang Ming-Bao. Generalized synchronization between two different complex delayed networks. Journal of Tianjin University (Science and Technology), 2014, 47 (1):81-85 http://www.cnki.com.cn/Article/CJFDTOTAL-TJDX201401014.htm [23] Zheng S, Wang S G, Dong G G, Bi Q S. Adaptive synchronization of two nonlinearly coupled complex dynamical networks with delayed coupling. Communications in Nonlinear Science & Numerical Simulation, 2012, 17 (1):284-291 https://www.researchgate.net/publication/232408590_Adaptive_synchronization_of_two_nonlinearly_coupled_complex_dynamical_networks_with_delayed_coupling [24] Sun Y Z, Li W, Ruan J. Generalized outer synchronization between complex dynamical networks with time delay and noise perturbation. Communications in Nonlinear Science & Numerical Simulations, 2013, 18 (4):989-998 https://www.researchgate.net/publication/257448775_Generalized_outer_synchronization_between_complex_dynamical_networks_with_time_delay_and_noise_perturbation [25] 罗毅平, 周笔锋.时滞扩散性复杂网络同步保性能控制.自动化学报, 2015, 41 (1):147-156 http://www.aas.net.cn/CN/abstract/abstract18592.shtmlLuo Yi-Ping, Zhou Bi-Feng. Guaranteed cost synchronization control of diffusible complex network systems with time delay. Acta Automatica Sinica, 2015, 41 (1):147-156 http://www.aas.net.cn/CN/abstract/abstract18592.shtml [26] Li D M, Lu J A, Wu X Q, Chen G R. Estimating the ultimate bound and positively invariant set for the Lorenz system and a unified chaotic system. Journal of Mathematical Analysis & Applications, 2006, 323 (2):844-853 https://www.researchgate.net/profile/Xiaoqun_Wu/publication/222529253_Estimating_the_ultimate_bound_and_positively_invariant_set_for_the_Lorenz_and_a_unified_chaotic_system/links/0c9605282cb11a3821000000/Estimating-the-ultimate-bound-and-positively-invariant-set-for-the-Lorenz-and-a-unified-chaotic-system.pdf [27] Chen L, Lu J A, Tse C K. Synchronization:an obstacle to identification of network topology. IEEE Transactions on Circuits and Systems——Ⅱ:Express Briefs, 2009, 56 (4):310-314 doi: 10.1109/TCSII.2009.2015381 -

 下载:
下载:








图(13)
计量
- 文章访问数: 3161
- HTML全文浏览量: 504
- PDF下载量: 1233
- 被引次数: 0
