

-
摘要: 由于在实际应用中目标模型不一定满足隐马尔科夫模型(Hidden Markov model,HMM)隐含的马尔科夫假设和独立性假设条件,一种更为一般化的Pairwise马尔科夫模型(Pairwise Markov model,PMM)被提出.它放宽了HMM的结构性限制,可以有效地处理更为复杂的目标跟踪场景.本文针对杂波环境下的多目标跟踪问题,提出一种在PMM框架下的势均衡多目标多伯努利(Cardinality balanced multi-target multi-Bernoulli,CBMeMBer)滤波器,并给出它在线性高斯PMM条件下的高斯混合(Gaussian mixture,GM)实现.最后,采用一种满足HMM局部物理特性的线性高斯PMM,将本文所提算法与概率假设密度(Probability hypothesis density,PHD)滤波器进行比较.实验结果表明本文所提算法的跟踪性能优于PHD滤波器.Abstract: Because the Markovian and independence assumptions, which are implicitly implied in hidden Markov model (HMM), may not be satisfied by the target model in some practical applications, a more general pairwise Markov model (PMM) has been proposed. PMM relaxes the structural limitations of HMM and can effectively deal with more complex target tracking scenarios. In this paper, a cardinality balanced multi-target multi-Bernoulli (CBMeMBer) filter in the framework of PMM is proposed for multi-target tracking in clutter environment, and a closed-form solution to the CBMeMBer filter under linear Gaussian PMM is presented. Finally, the proposed algorithm is compared with the probability hypothesis density (PHD) filter via simulations using a particular linear Gaussian PMM, which keeps the local physical properties of HMM. Simulation results show that the tracking performance of the proposed algorithm is better than that of the PHD filter.1) 本文责任编委 高会军
-
表 1 不同杂波环境下的性能比较
Table 1 Tracking performance verses clutter's number
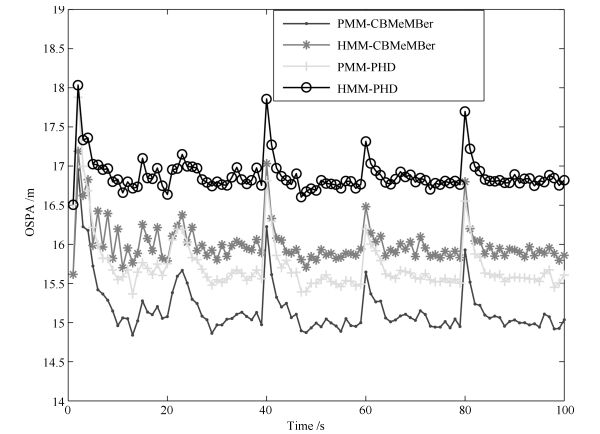
$\lambda $ 0 5 10 20 PMM-CBMeMBer OSPA(m) 15.173 15.196 15.202 15.390 时间(s) 0.0203 0.0221 0.0237 0.0244 HMM-CBMeMBer OSPA(m) 16.010 16.065 16.086 16.234 时间(s) 0.0179 0.0194 0.0211 0.0228 PMM-PHD OSPA(m) 15.631 15.654 15.698 15.739 时间(s) 0.0203 0.0280 0.0350 0.0476 HMM-PHD OSPA(m) 16.806 16.817 16.855 16.889 时间(s) 0.0084 0.0118 0.0132 0.0191  下载: 导出CSV
下载: 导出CSV
-
[1] Mahler R P S. Advances in Statistical Multisource-Multitarget Information Fusion. Norwood, MA, USA:Artech House, 2014. [2] Mahler R P S. Statistical Multisource-Multitarget Information Fusion. Boston, USA:Artech House, 2007. [3] Mahler R P S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4):1152-1178 doi: 10.1109/TAES.2003.1261119 [4] Vo B N, Singh S, Doucet A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4):1224-1245 doi: 10.1109/TAES.2005.1561884 [5] Vo B N, Ma W K. The Gaussian mixture probability hypothesis density filter. IEEE Transactions on Signal Processing, 2006, 54(11):4091-4104 doi: 10.1109/TSP.2006.881190 [6] Mahler R P S. PHD filters of higher order in target number. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4):1523-1543 doi: 10.1109/TAES.2007.4441756 [7] Vo B T, Vo B N, Cantoni A. Analytic implementations of the cardinalized probability hypothesis density filter. IEEE Transactions on Signal Processing, 2007, 55(7):3553-3567 doi: 10.1109/TSP.2007.894241 [8] Vo B T, Vo B N, Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Transactions on Signal Processing, 2009, 57(2):409-423 doi: 10.1109/TSP.2008.2007924 [9] Reuter S, Vo B T, Vo B N, Dietmayer K. The labeled multi-Bernoulli filter. IEEE Transactions on Signal Processing, 2014, 62(12):3246-3260 doi: 10.1109/TSP.2014.2323064 [10] Zhang G H, Lian F, Han C Z. CBMeMBer filters for nonstandard targets, I:extended targets. In:Proceedings of the 17th IEEE International Conference on Information Fusion (FUSION). Salamanca, Spain:IEEE, 2014. 1-6 [11] 连峰, 韩崇昭, 李晨.多模型GM-CBMeMBer滤波器及航迹形成.自动化学报, 2014, 40(2):336-347 http://www.aas.net.cn/CN/abstract/abstract18295.shtmlLian Feng, Han Chong-Zhao, Li Chen. Multiple-model GM-CBMeMBer filter and track continuity. Acta Automatica Sinica, 2014, 40(2):336-347 http://www.aas.net.cn/CN/abstract/abstract18295.shtml [12] Hoang H G, Vo B T, Vo B N. A fast implementation of the generalized labeled multi-Bernoulli filter with joint prediction and update. In:Proceedings of the 18th IEEE International Conference on Information Fusion (FUSION). Washington, USA:IEEE, 2015. 999-1006 [13] 陈辉, 韩崇昭. CBMeMBer滤波器序贯蒙特卡罗实现新方法的研究.自动化学报, 2016, 42(1):26-36 http://www.aas.net.cn/CN/abstract/abstract18793.shtmlChen Hui, Han Chong-Zhao. A new sequential Monte Carlo implementation of cardinality balanced multi-target multi-Bernoulli filter. Acta Automatica Sinica, 2016, 42(1):26-36 http://www.aas.net.cn/CN/abstract/abstract18793.shtml [14] Saha S, Gustafsson F. Particle filtering with dependent noise processes. IEEE Transactions on Signal Processing, 2012, 60(9):4497-4508 doi: 10.1109/TSP.2012.2202653 [15] Pieczynski W, Desbouvries F. Kalman filtering using pairwise Gaussian models. In:Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP). Hong Kong, China:IEEE, 2003. 8-11 [16] Desbouvries F, Pieczynski W. Particle filtering in pairwise and triplet Markov chains. In:Proceedings of the 2003 IEEE-EURASIP NSIP workshop. Grado, Italy:IEEE, 2003. 57-60 [17] Pieczynski W. Pairwise Markov chains. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(5):634-639 doi: 10.1109/TPAMI.2003.1195998 [18] Nemesin V, Derrode S. Robust blind pairwise Kalman algorithms using QR decompositions. IEEE Transactions on Signal Processing, 2013, 61(1):5-9 doi: 10.1109/TSP.2012.2222383 [19] Derrode S, Pieczynski W. Signal and image segmentation using pairwise Markov chains. IEEE Transactions on Signal Processing, 2004, 52(9):2477-2489 doi: 10.1109/TSP.2004.832015 [20] Petetin Y, Desbouvries F. Multi-object filtering for pairwise Markov chains. In:Proceedings of the 11th IEEE International Conference on Information Science, Signal Processing and Their Applications (ISSPA). Montreal, QC, Canada:IEEE, 2012. 348-353 [21] Petetin Y, Desbouvries F. Bayesian Multi-object filtering for pairwise Markov chains. IEEE Transactions on Signal Processing, 2013, 61(18):4481-4490 doi: 10.1109/TSP.2013.2271751 [22] Jazwinski A H. Stochastic Processes and Filtering Theory. New York, USA:Academic Press, 1970. [23] Kalman R E. A new approach to linear filtering and prediction problems. Journal of Basic Engineering, 1960, 82(1):35-45 doi: 10.1115/1.3662552 [24] Schuhmacher D, Vo B T, Vo B N. A consistent metric for performance evaluation of multi-object filters. IEEE Transactions on Signal Processing, 2008, 56(8):3447-3457 doi: 10.1109/TSP.2008.920469 -

 下载:
下载:

图(4) / 表(1)
计量
- 文章访问数: 2696
- HTML全文浏览量: 277
- PDF下载量: 703
- 被引次数: 0
