

-
摘要: 人脸表情是人际交往的重要渠道,识别人脸表情可促进对人心理状态和情感的理解.不同于常规的人脸表情,微表情是一种特殊的面部微小动作,可以作为判断人主观情绪的重要依据,在公共安防和心理治疗领域有广泛的应用价值.由于微表情具有动作幅度小、持续时间短的特点,对微表情的人工识别需要专业的培训,且识别正确率较低.近年来不少研究人员开始利用计算机视觉技术自动识别微表情,极大地提高了微表情的应用可行性.本文综述人脸微表情识别的定义和研究现状,总结微表情识别中的一些关键技术,探讨潜在的问题和可能的研究方向.Abstract: Facial expression is an important channel in social interaction. Reading facial expression can improve understanding of psychological condition and emotional status. Different from normal expressions, microexpression is a special kind of subtle facial action. It serves as a vital clue for affective estimation, and has broad applications in public security and psychological treatment. Recognizing microexpression requires professional training for human due to its short duration and subtle movement. So far a low recognition accuracy has been reported in the literature. In recent years, researchers have been studying microexpression recognition based on computer vision, which can largely improve the feasibility of such recognition. In this article, we introduce problem definition and current research status of microexpression, survey several representative techniques in this topic, and discuss some underlying issues and potential research directions.
-
过程运行状态评价在过程安全运行的前提下, 综合考虑了产品质量、物耗、能耗、经济收益等因素, 对过程运行性能优劣进行进一步评价, 包括过程运行状态优性在线评价和非优运行状态原因追溯两部分[1-5].优性在线评价实时判断运行性能优劣程度, 非优原因追溯诊断导致非优运行状态的原因, 指导操作人员进行生产调整.理想的运行状态有助于提高综合经济效益和生产效率、降低生产成本.因此, 对过程运行性能优劣评价的研究具有重要的理论和应用价值.
传统的过程运行性能评价方法可分为两类:基于定量信息的评价方法和基于定性信息的评价方法, 其中, 定量信息指用数值大小描述的变量信息, 定性信息指定性描述的变量信息, 主要通过语义变量来描述.基于定量信息的评价方法处理以定量信息为主的过程性能评价问题.多元统计方法是一种应用最广泛的定量评价方法, 适用于过程先验知识较少的过程[6-8]. Liu等提出了基于主成分分析法(Principal component analysis, PCA)和多集合主成分分析法(Multi-set PCA, MsPCA)的运行状态优性在线评价方法[9-10], 但此类方法并没有考虑过程变量与评价指标之间的关系.基于指标预测的评价方法, 虽避免了此问题, 但所需数据量非常庞大[1-2].概率框架下的性能评价方法, 如:基于高斯混合模型(Gaussian mixture model, GMM)[3, 10]和贝叶斯理论(Bayesian theory)[11-12]的评价方法, 已广泛应用于性能评价中.基于概率理论的评价方法需要先验知识辅助确定概率密度函数.不同于经典方法过于严苛的要求, 智能评价方法, 如基于人工神经网络(Artificial neural network, ANN)的评价方法, 由于其学习能力和非线性处理能力强, 受到研究者的青睐[13-14].但是, 此类方法容易陷入局部最优值, 可能出现过拟合现象.基于定性信息的评价方法处理以定性信息为主的过程性能评价问题.最常用的处理定性信息的方法有贝叶斯网(Bayesian network, BN)、模糊理论(Fuzzy theory)和粗糙集理论(Rough set, RS)等. BN通过建立表示因果关系的网络和概率表来进行性能评价, BN的构建通常需要大量过程因果知识[15-16].模糊理论通过隶属度函数来进行评价, 但隶属度函数和判定阈值的选取尚无严格的理论指导[17-18]. RS在保持分类能力不变的前提下, 对数据表进行约简, 去除冗余信息, 提取启发式规则, 进行评价[19].但经典RS并未考虑数据与目标概念之间的覆盖关系, 因此, 概率粗糙集(Probabilistic rough set, PRS)应运而生[20-22]. PRS定义了等价类与目标概念的隶属程度, 以后验概率的形式量化数据与目标概念之间的覆盖关系.
定量方法的优势在于:精度高, 能够建立变量之间的相关性, 预测性能较好, 是提取过程内部特性的方法, 适用于变量测量准确的过程.但是, 传统定量方法解释性差, 在样本数目少时, 可能会出现病态的模型.定性方法的优势在于:解释性强, 可以处理不精确的信息, 模型建立容易, 适用于过程存在定性信息的过程.但是, 传统定性方法精度低, 要求数据类型覆盖所有可能的运行情况, 是提取过程外部特性的方法, 预测性能较差.若采用定性方法处理定量变量, 需要将定量信息离散化, 在信息离散化过程中, 会损失有效信息, 降低评价精度.综上所述, 定量与定性方法各有优、劣势, 相辅相成.在实际流程工业生产中, 既有定量变量, 又有定性变量.由于定性、定量变量共存的问题, 传统评价方法难以直接应用.
实际工业过程还可能面临一个巨大的挑战, 即流程工业特性.流程工业过程生产流程长, 规模庞大, 变量数目巨大, 变量相关性复杂.一个流程工业生产过程, 通常包含若干生产单元.同一个生产单元内, 变量强耦合, 不同生产单元间, 变量弱耦合.生产过程从前至后, 依序进行, 每一个生产单元的生产时间不尽相同.因此, 将传统的评价方法直接应用于流程工业过程, 常常难以得到令人满意的准确率.流程工业过程生产周期长、变量众多、机理复杂, 难以建立准确的全局模型.最常用的处理流程工业特性的方法就是将过程根据物理特性划分层次和子块, 这种措施已广泛应用于安全性能评价中[23-24]. Macgregor等[25]和Jiang等[26]分别提出了分块的多元统计方法和分块的概率论方法, 来处理流程工业过程性能评价问题.相比于分块方法, 分层的性能评价方法更注重子块之间的相关性[27].在分层或分块性能评价思想的基础上, 研究者在质量预测[28]、自适应[29]等方向进行了进一步探索.但目前对流程工业过程优性评价的研究还较少.传统的分层分块性能评价方法难以直接应用于实际流程工业过程运行状态评价中, 主要原因如下: 1)全流程的评价问题难以分解为子块的评价问题; 2)子块的优性难以定义; 3)未考虑定量、定性变量共存问题.
本文提出一种基于两层分块混合模型的流程工业过程运行状态评价方法.横向上, 将流程工业过程, 根据其物理特性划分子块, 将联系紧密的设备或生产环节划分至同一子块内, 将联系相对较弱的设备或生产环节划分至不同子块; 纵向上, 形成两个评价层次即子块层和全流程层.本文所提两层分块方法与传统方法不同之处在于, 所提方法能够评价子块的优劣程度, 不需要显式的全流程模型即可评价全流程的运行状态, 并快速定位非优的子块.这种灵活的分层分块评价方式, 为混合模型的建立提供了便利.在一个子块内, 综合考虑评价精度需求、定量和定性变量的比例、模型建立的复杂度, 来选择定量或者定性方法进行建模和评价.不失一般性的, 本文假设:以定量信息为主的子块, 采用GMM进行建模, 获取子块内各运行状态等级数据分布的概率密度函数; 以定性信息为主的子块, 采用PRS进行建模, 得到子块内各运行状态等级的推理规则; 于是, 可以建立两层分块GMM-PRS (Gaussion mixture model-probabilistic rough set)模型.该混合模型的优势在于, 根据子块的数据特性, 灵活地选用恰当的评价方法, 可减少有效信息的损失, 保证方法的有效性.最后, 本文将所提基于两层分块GMM-PRS模型的评价方法应用于国内某黄金湿法冶炼过程中, 验证其有效性.此外, 综合经济效益是目前应用最广泛的过程运行状态评价指标之一, 本文采用综合经济效益为全流程运行状态评价指标.
1. 基本方法简介
1.1 GMM简介
高斯分布是一种常见的数据分布, 若高维空间点的分布近似为椭球体, 则可用单一高斯密度函数来描述这些数据的分布特性.
令${\boldsymbol{x}} \in {{\bf R} ^{1 \times J}}$是服从高斯分布的$J$维过程数据, 该类数据的概率密度函数可以用高斯函数表示:
$ \begin{align} \label{eq1} g({\boldsymbol{x}}|{\boldsymbol{\theta }})=\, & \frac{1}{{{{(2\pi )}^\frac{J}{2}}{{\left| {\boldsymbol{\Sigma }} \right|}^\frac{1}{2}}}}\times\nonumber\\&\exp \left[ - \frac{1}{2}({\boldsymbol{x}} - {\boldsymbol{\mu }}){({\boldsymbol{\Sigma }})^{ - 1}}{({\boldsymbol{x}} - {\boldsymbol{\mu }})^{\rm{T}}}\right] \end{align} $
(1) 其中, 参数${\boldsymbol{\theta }} = \{ {\boldsymbol{\mu }}, {\boldsymbol{\Sigma }}\}$, ${\boldsymbol{\mu }}$为该类数据的均值向量, ${\boldsymbol{\Sigma }}$为协方差矩阵[11].这些参数的取值决定了概率密度函数的特性, 如函数的中心点、宽窄和形状等.
一些过程数据不服从高斯分布, 但可以用高斯混合模型描述其分布特性.假设该过程数据分布包含$N$个高斯分量, 第$n$个高斯分量的概率密度函数表示为$g({\boldsymbol{x}}|{{\boldsymbol{\theta }}^n})$, 其先验概率为${\omega ^n}$, $n = 1, 2, \cdots, N$.则此过程概率密度函数为:
$ \begin{equation} \label{eq2} p({\boldsymbol{x}}|{\boldsymbol{\theta }}) = \sum\limits_{n = 1}^N {{\omega ^n}g({\boldsymbol{x}}|{{\boldsymbol{\theta }}^n})} \end{equation} $
(2) 数据${\boldsymbol{x}}$属于各高斯分量的概率可用贝叶斯理论求得:
$ \begin{equation} \label{eq3} P({C^n}|{\boldsymbol{x}}) = \frac{{{\omega ^n}g({\boldsymbol{x}}|{{\boldsymbol{\theta }}^n})}}{{\sum\limits_{n' = 1}^N {{\omega ^{n'}}g({\boldsymbol{x}}|{{\boldsymbol{\theta }}^{n'}})} }} \end{equation} $
(3) 其中, ${C^n}$表示第$n$个高斯成分.
1.2 PRS简介
RS是一种在不需要过程先验知识的情况下进行推理的方法, 针对定性数据, 可进行高效、准确的推理.但是, RS存在没考虑子集间相关性和定义过于严格的问题.因此, PRS应运而生.
令$U$为目标的非空有限集合, $U$称作论域, $A$为一个有限的属性集合, $R$是$A$的一个子集.对于任意${\boldsymbol{x}} \in U$, 定义${\boldsymbol{x}}$在$R$上的等价类${[{\boldsymbol{x}}]_R}$为${[{\boldsymbol{x}}]_R} = \{ {\boldsymbol{y}} \in U|\forall a \in R, f({\boldsymbol{x}}, a) = f({\boldsymbol{y}}, a)\}$, 其中, $f({\boldsymbol{x}}, a)$为${\boldsymbol{x}}$在属性$a$上的取值.给定一个非空子集$X \subseteq U$和一个等价类${[{\boldsymbol{x}}]_R}$, 可以计算如下概率:
$ \begin{equation} \label{eq4} P\left( {X|{{[{\boldsymbol{x}}]}_R}} \right) = \frac{{\left| {{{[{\boldsymbol{x}}]}_R} \cap X} \right|}}{{\left| {{{[{\boldsymbol{x}}]}_R}} \right|}} \end{equation} $
(4) 其中, $|S|$表示集合$S$的基, 即$S$中的元素个数. $P\left( {X|{{[{\boldsymbol{x}}]}_R}} \right)$表示${[{\boldsymbol{x}}]_R}$中, $X$的覆盖程度.
给定阈值$\alpha $和$\beta $, 针对$0 \le \beta < \alpha \le 1$的情况, $X$的下近似、上近似、$R$边界域定义为:
$ \begin{equation} \label{eq5}\begin{cases} {R_\alpha }(X) = \left\{ {{\boldsymbol{x}} \in U|P\left( {X|{{[{\boldsymbol{x}}]}_R}} \right) \ge \alpha } \right\}\\ {{\bar R}_\beta }(X) = \left\{ {{\boldsymbol{x}} \in U|P\left( {X|{{[{\boldsymbol{x}}]}_R}} \right) > \beta } \right\}\\ B{N_R}(X) = \left\{ {{\boldsymbol{x}} \in U|\alpha > P\left( {X|{{[{\boldsymbol{x}}]}_R}} \right) > \beta } \right\} \end{cases} \end{equation} $
(5) 针对$\alpha = \beta \ne 0$的情况, $X$的下近似、上近似、$R$边界域定义为:
$ \begin{equation} \label{eq6} \begin{cases} {R_\alpha }(X) = \left\{ {{\boldsymbol{x}} \in U|P\left( {X|{{[{\boldsymbol{x}}]}_R}} \right) > \alpha } \right\}\\ {{\bar R}_\alpha }(X) = \left\{ {{\boldsymbol{x}} \in U|P\left( {X|{{[{\boldsymbol{x}}]}_R}} \right) \ge \alpha } \right\}\\ B{N_R}(X) = \left\{ {{\boldsymbol{x}} \in U|P\left( {X|{{[{\boldsymbol{x}}]}_R}} \right) = \alpha } \right\} \end{cases} \end{equation} $
(6) $X$的下近似中, 包含所有一定属于$X$的元素; $X$的上近似中, 包含所有可能属于$X$的元素.如果边界域$B{N_R}(X)$为空, 那么$X$称为精确集; 否则, $X$称为粗糙集.如果取$\alpha = 1$、$\beta = 0$, PRS退化为传统RS.
2. 两层分块GMM-PRS模型的建立
根据流程工业特性, 本文提出两层分块评价结构, 并根据每个子块的数据特性, 分别用定量或定性方法, 建立子块评价模型.
2.1 两层分块GMM-PRS结构
过程运行状态的优劣通常可反映在综合经济指标(Comprehensive economic index, CEI)上, CEI越高, 运行状态越好, CEI也成为了广泛接受的运行状态优性评价指标[23].传统评价方法对过程变量${\boldsymbol{x}}$和评价指标CEI可建立一个单模型:
$ CEI = f({\boldsymbol{x}}) $
(7) 为了降低流程工业过程运行状态评价问题的规模、提高模型解释性, 本文提出如图 1所示的两层分块结构; 并且, 对以定量和定性信息为主的子块, 分别进行定量和定性建模.
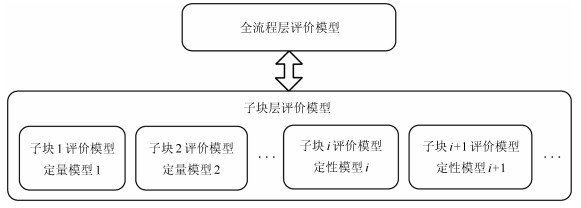 图 1 两层分块混合模型结构示意图Fig. 1 The illustration of the two-level multi-block hybrid model structure
图 1 两层分块混合模型结构示意图Fig. 1 The illustration of the two-level multi-block hybrid model structure在子块层, 一个流程工业过程根据其过程特性, 划分为多个有物理意义的子块.子块内, 变量相关性强; 子块间, 变量相关性弱.在全流程层, 提取各子块间的相关性.因此, 两层分块结构增强了模型解释性, 减少了问题规模, 降低了建模难度, 削弱了对子块性能无关变量的影响, 放大了对子块性能有关变量的影响.
将过程进行横向分块、纵向分层后, 得到了两层分块结构, 再根据每个子块的特性建立相应评价模型, 为全流程的评价提供基础.按照子块的数据特性选择适当的建模方法, 保证了模型的有效性和精度.高斯分布是一种常见的数据分布, 若高维空间点的分布近似为椭球体, 则可用单一高斯密度函数来描述这些数据的概率密度函数.针对以定量信息为主的单模态过程, 同一运行状态等级的定量数据分布特性相似, 近似服从单高斯分布, 可视为所有定量数据分布的一个高斯成分.过程中, 定性变量的数目和状态种类都较少, 因此, 定性变量可能出现状态组合种类不会很多, 其分布可以用历史数据进行学习.而对于定性信息占主导地位的过程, 定性变量数目多, 相应定性状态的组合数目也会大幅增大.那么, 基于GMM的方法, 会面临组合爆炸、建模数量庞大的问题.也就是说, 以定性变量为主的过程, 不再适合用基于概率分布的方法来进行评价. Pawlak教授提出的RS理论是一种在不确定性存在的前提下, 进行推理的方法, 现已广泛应用于安全性评价和风险评价等领域.为改进RS无法处理不一致规则的问题, 概率粗糙集PRS方法应运而生. PRS是一种具有严格理论支撑并且应用广泛的定性信息处理方法, 因此本文采用PRS对以定性信息为主的子块进行建模.值得注意的是, 可选的子块建模方法并不局限于GMM和PRS方法.
2.1.1 运行状态等级确定
本文所述定性信息指用语义变量对变量状态进行描述的信息, 定量信息指用数值大小描述的变量信息.建模数据中, 定量变量以变量取值的形式表示, 定性变量以变量状态等级序号的形式表示, 如温度的高、中、低三种状态, 分别对应状态等级1、2、3.其中, 定性变量状态等级只与变量幅值大小趋势相关, 与性能优劣无关.本文所使用的定量数据是经过平滑处理后的数据, 定性数据根据其物理意义划分为了不同状态, 并用一系列连续的正整数对状态等级进行区分.其中, 平滑处理的原理是用一定长度的滑动窗口内数据的平均水平来代表该滑动窗口的信息, 这种预处理方法在一定程度上克服了噪声的影响, 使此均值更能反映滑动窗口内的主要信息.针对变化快速或噪声水平较低的过程, 为避免过程动态特性被淹没, 滑动窗口长度不宜过长.针对变化缓慢或噪声水平较高的过程, 为减少系统正常波动导致的误评价, 滑动窗口长度不宜过短.
2.2 基于两层分块GMM-PRS的离线建模
根据过程知识, 建立两层分块结构之后, 基于两层分块GMM-PRS的评价模型离线建立包括运行状态等级确定和模型建立, 其中, 模型建立分定量GMM和定性PRS模型.
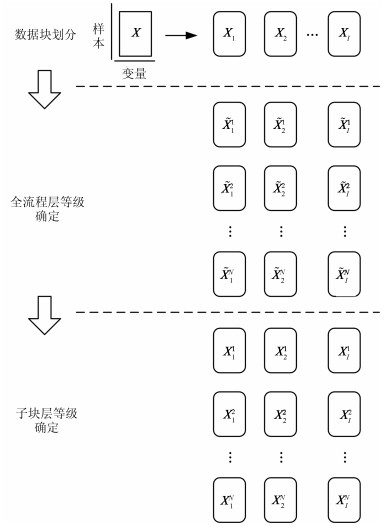
针对一个复杂的流程工业过程, 在划分单元子块之后, 如果各子块存在独立的评价指标, 那么可以对每个子块建立以子块生产指标为评价标准的模型, 再在子块生产指标的基础上, 进行全流程的运行状态评价.但是, 本文旨在解决无子块评价指标的流程工业过程运行状态优性评价问题.此时, 子块的优性定义变得十分困难.本文利用唯一的评价指标–全流程综合经济指标CEI, 作为子块运行状态等级划分标准.企业通常会在一定周期内对CEI进行估算并作为生产考核的标准, 但是估算周期比较长, 无法直接根据该估算结果实时指导生产.所以, 我们可以将CEI视作定性变量, 只需确定其在一定周期内的定性状态.根据全流程CEI的定性状态, 过程运行状态被划分为若干等级, 等级数目通常由过程评价的精度需求、过程检测情况等因素共同决定.本文假设全流程综合经济指标包含$N$个状态, 对应的全流程运行状态等级由1至$N$, 优性依次降低.在划分子块后, 就一个子块的一类运行情况而言, 定义此类运行情况下所能达到的最好全流程运行状态等级为这种运行情况下该子块的运行状态等级.从另一个角度看, 该运行情况下, 当其他子块都处于最好匹配状态时, 该子块使全流程所能达到的最好等级代表了该子块所处运行情况的极限最好情况, 是子块所处运行情况固有特性的一种体现.如图 2所示, 建模数据的运行状态等级离线确定方法包括以下三个步骤: 1)数据块划分, 2)全流程层等级确定, 3)子块层等级确定.
1) 数据块划分
令建模数据为${\boldsymbol{X}} \in {{\bf R} ^{H \times J}}$, $H$表示样本个数, $J$表示变量个数.根据变量和子块之间的关系, 将建模数据${\boldsymbol{X}}$划分为$I$个子块, 用${{\boldsymbol{X}}_i} \in {{\bf R} ^{H \times {J_i}}} (i = 1, 2, \cdots, I)$表示第$i$个子块的建模数据, ${J_i}$为第$i$个子块的变量数目.
2) 全流程层等级确定
根据全流程评价指标CEI, 过程运行状态被划分为若干等级, 如:优/良/中/差等.那么, 每一个子块数据${{\boldsymbol{X}}_i}$, 可以根据全流程评价指标CEI, 划分为不同等级, 记为$\tilde{\boldsymbol X}_i^1, \tilde{\boldsymbol X}_i^2, \cdots, \tilde{\boldsymbol X}_i^N$, 其中, $\tilde{\boldsymbol X}_i^n$表示子块$i$中全流程等级为$n$的数据, $i = 1, 2, \cdots, I$, $n = 1, 2, \cdots, N$, $I$为子块数目, $N$为全流程等级数目.
3) 子块层等级确定
由于全流程层运行状态等级不能单独取决于一个子块的运行状态, 所以, 相似的子块数据可能被标记了不同的全流程层运行状态等级.对于一个子块:若该子块运行于最优运行状态, 并且其他子块运行于最优匹配状态时, 全流程层运行状态可能达到最优等级; 若该子块运行于一个非优运行状态中, 无论其他子块是否运行于最优匹配状态, 全流程层运行状态都不可能达到最优等级.因此, 一个子块数据的子块层运行状态等级定义为:该子块内相同数据所能达到的最好全流程层运行状态等级.所以, 全流程层的等级数目和子块层的等级数目相等.假设运行状态, 等级1到$N$的优性依次降低.确定子块层运行状态等级$n$中数据的具体做法为:以全流程层等级$n, n + 1, \cdots, N$中数据$\tilde{\boldsymbol X}_i^n$为基础, 将等级$n + 1, n + 2 \cdots, N$中与等级$n$中数据相似度大于阈值$\varepsilon $的数据, 从原来的等级中转移至等级$n$的数据集中, 更新后的等级$n$中的数据为子块层运行状态等级为$n$的数据, 记为${\boldsymbol{X}}_i^n$, 更新后的等级$n + 1, n + 2, \cdots, N$中的数据为确定下一等级数据的基础.两条数据的相似度定义如下:
$ \begin{equation} \label{eq8} {\rm{sim}}({{\boldsymbol{x}}_1}, {{\boldsymbol{x}}_2}) = 1 - \frac{1}{{J'}}\sum\limits_{j = 1}^{J'} {d({x_{1, j}}, {x_{2, j}})} \end{equation} $
(8) 其中,
$ \begin{equation} \label{eq9} d({x_{1, j}}, {x_{2, j}}) = \begin{cases} \left| {\dfrac{{{x_{1, j}} - {x_{2, j}}}}{{x_j^{\max } - x_j^{\min }}}} \right|\mbox{ (定量变量)}\\ \\ \dfrac{{\left| {{x_{1, j}} - {x_{2, j}}} \right|}}{{{A_j} - 1}}\mbox{ (定性变量)} \end{cases} \end{equation} $
(9) ${x_{1, j}}$ (${x_{2, j}}$)是${{\boldsymbol{x}}_1}$ (${{\boldsymbol{x}}_2}$)的第$j$个变量; 若第$j$个变量为定量变量, $x_j^{\max }$($x_j^{\min }$)是该变量的工艺最大值(最小值); 若第$j$个变量为定性变量, $\left| {{x_{1, j}} - {x_{2, j}}} \right|$表示${x_{1, j}}$和${x_{2, j}}$对应定性状态等级的等级差值的绝对值; ${A_j}$是第$j$个变量的状态等级数目, $J{\rm{'}}$为变量数目.
根据上述三个步骤, 子块数据的全流程层等级和子块层等级能相应确定.由于上述等级划分规则, 并不需要建立显式的全流程层模型.全流程层运行状态等级由子块层中最劣的子块运行状态等级决定, 原因将在第4节的全流程运行状态在线评价方法中阐述.
2.2.1 定量建模
针对以定量信息为主的子块, 将每一个运行状态等级的数据作为一个高斯分量, 分别建立单高斯模型, 拟合各等级数据的概率密度函数.但由于少数定性变量的存在, 无法直接建立高斯模型.
假设${\boldsymbol{x}}$来自于第$i$个子块的第$n$个等级, 即${\boldsymbol{x}} \in {\boldsymbol{X}}_i^n$.令${\pmb{x}} = [{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\pmb x} }},b\pm {\bar {\pmb x}}]$, 其中, ${\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\pmb x} }}$表示定性变量, ${\bar{\boldsymbol x}}$表示定量变量. ${\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\pmb x} }}$根据定性变量状态的不同, 存在多种组合形式.以定量信息为主的子块所含定性变量数目少, 一个定性变量的状态种类一般不会很多, 不是每一种理论上存在的定性组合都会在实际应用中出现.所以, ${\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\pmb x} }}$中可能出现的定性状态组合种类一般不会很多.用${\left( {{\bar {\boldsymbol X}}_i^n} \right)_k}$表示${\boldsymbol{X}}_i^n$中, 定性变量对应为${\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over {\pmb x} }}_i^n} \right)_k}$的样本的定量变量部分, 其中, $k = 1, 2, \cdots, K$, $K$为定性变量组合的数目.假设${\bar {\boldsymbol x}} \in {\left( {{\bar {\boldsymbol X}}_i^n} \right)_k}$, 则针对定性变量为${\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over {\pmb x} }}_i^n} \right)_k}$的情况, 第$i$个子块第$n$个等级的概率密度函数可用高斯函数表示为:
$ \begin{align} \label{eq10} &g\left[ {{\bar{\boldsymbol x}}\left| {{{\left( {{\bar{\boldsymbol \theta }}_i^n} \right)}_k}, {{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}} \right.} \right] =\dfrac{1}{{{{(2\pi )}^{\frac{J_i}{2}}}{{\left| {{{({\bar{\boldsymbol \Sigma }}_i^n)}_k}} \right|}^\frac{1}{2}}}}\times \nonumber\\& \qquad\exp \left[ { - \dfrac{1}{2}({\bar{\boldsymbol x}} - {{({\bar{\boldsymbol \mu }}_i^n)}_k})({\bar{\boldsymbol \Sigma }}_i^n)_k^{ - 1}{{({\bar{\boldsymbol x}} - {{({\bar{\boldsymbol \mu }}_i^n)}_k})}^{\rm{T}}}} \right] \end{align} $
(10) 参数${({\bar{\boldsymbol \theta }}_i^n)_k} = \left\{ {{{({\bar{\boldsymbol \mu }}_i^n)}_k}, {{({\bar{\boldsymbol \Sigma }}_i^n)}_k}} \right\}$, ${({\bar{\boldsymbol \mu }}_i^n)_k}$和${({\bar{\boldsymbol \Sigma }}_i^n)_k}$分别是均值和协方差, $i = 1, 2, \cdots, I$, $n = 1, 2, \cdots, N $.
此外, 还需要通过历史数据统计以下概率:
$ \begin{equation} \label{eq11} \begin{cases} P\left[ {{{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k}} \right] = \dfrac{{Num\left[ {{{\left( {{\bar{\boldsymbol X}}_i^n} \right)}_k}} \right]}}{{\sum\limits_{n = 1}^N {Num\left[ {{{\left( {{\bar{\boldsymbol X}}_i^n} \right)}_k}} \right]} }}\\ P\left[ {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}} \right] = \dfrac{{\sum\limits_{n = 1}^N {Num\left[ {{{\left( {{\bar{\boldsymbol X}}_i^n} \right)}_k}} \right]} }}{{\sum\limits_{k = 1}^K {\sum\limits_{n = 1}^N {Num\left[ {{{\left( {{\bar{\boldsymbol X}}_i^n} \right)}_k}} \right]} } }}\\ P\left[ {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}\left| {{{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k}} \right.} \right] = \dfrac{{Num\left[ {{{\left( {{\bar{\boldsymbol X}}_i^n} \right)}_k}} \right]}}{{\sum\limits_{k = 1}^K {Num\left[ {{{\left( {{\bar{\boldsymbol X}}_i^n} \right)}_k}} \right]} }} \end{cases} \end{equation} $
(11) 其中, $Num\left[{\boldsymbol{\psi }} \right]$表示矩阵${\boldsymbol{\psi }}$中的样本个数.
一旦确定上述参数, 给定一个样本${\boldsymbol{x}} = [{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}, {\bar{\boldsymbol x}}] \in {\boldsymbol{X}}_i^n$, 可以计算如下概率:
$ \begin{equation} \label{eq12}\small \begin{array}{l} P\left[ {{\boldsymbol{X}}_i^n\left| {\boldsymbol{x}} \right.} \right] = P\left[ {{{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k}\left| {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}, {\boldsymbol{\bar x}}} \right.} \right] =\\[4mm] \dfrac{{Pr \left[ {{{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k}, {\boldsymbol{\bar x}}\left| {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over {\boldsymbol x} }}_i^n} \right)}_k}} \right.} \right]Pr \left[ {{{\left( {{\boldsymbol{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over x} }}_i^n} \right)}_k}} \right]}}{{Pr \left[ {{\boldsymbol{\bar x}}\left| {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}} \right.} \right]Pr \left[ {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}} \right]}} =\\[6mm] \dfrac{{Pr \left[ {{{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k} \left| {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}} \right.} \right]Pr\left[ {{\bar{\boldsymbol x}}\left| {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}, {{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k}} \right.} \right]}}{{Pr \left[ {{\bar{\boldsymbol x}}\left| {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}} \right.} \right]}} =\\[6mm] \dfrac{{P\left[ {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle \smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}\left| {{{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k}} \right.} \right] \times P\left[ {{{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k}} \right] \times g\left[ {{\bar{\boldsymbol x}}\left| {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}, {{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k}} \right.} \right]}}{{P\left[ {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}} \right]\sum\limits_{n' = 1}^N {P\left[ {{{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k}} \right]g\left[ {{\bar{\boldsymbol x}}\left| {{{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}, {{\left( {{\boldsymbol{\theta }}_i^n} \right)}_k}} \right.} \right]} }} \end{array} \end{equation} $
(12) 2.2.2 定性建模
针对以定性信息为主的子块, 采用PRS进行建模.基于PRS的离线建模包含以下三个主要步骤: 1)数据预处理; 2)决策表组织; 3)属性约简.
1) 数据预处理
PRS是一种以定性或离散数据为基础的推理方法, 因此, 需要将数据进行相应预处理.针对定性数据, 为后文计算方便, 将变量的各定性状态用一系列整数表示.针对以定性信息为主的子块中少数的定量数据, 需要将定量数据进行离散化, 得到一系列离散数值.离散化处理方法很多, 如等距离划分、等频率划分、Naive Scaler算法、基于断点重要性的离散化算法、基于属性重要性的离散化算法等[30].
2) 决策表组织
决策表的每一列表示一个属性, 每个属性的取值被划分为若干离散状态.通常, 属性可分为条件属性和决策属性.决策表每一行代表论域中的一个元素和一种推理规则.以子块内过程变量为条件属性, 以子块层运行状态等级为决策属性, 分别建立各子块决策表.
3) 属性约简
属性约简目的在于简化决策表, 在保持分类能力不变的前提下, 删除对决策没有影响的条件属性.常用的属性约简方法有:一般约简算法、基于差别矩阵和逻辑运算的属性约简算法、归纳属性约简算法等[30].
3. 基于两层分块GMM-PRS的过程运行状态在线评价和非优原因追溯
基于两层分块GMM-PRS的过程运行状态在线评价方法, 先在子块层, 对各个子块分别进行评价, 再在全流程层, 综合各子块信息得到最终评价结果.针对非优运行状态, 在非优的子块内进行原因追溯.
3.1 子块层的运行状态在线评价
用${{\boldsymbol{x}}_t}$表示$t$时刻子块$i$的数据.若子块$i$为以定量变量为主的子块, ${{\boldsymbol{x}}_t}$可分解为$[{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_t}, {{\bar{\boldsymbol x}}_t}]$. ${{\boldsymbol{x}}_t}$中的定性变量取值${{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_t}$与${({\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n)_k}$的相似度为${\rm{sim}}\left( {{{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}}_t}, {{({\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n)}_k}} \right)$.针对等级$n$, 如果$\max \left\{ {{\rm{sim}}\left[{{{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}}_t}, {{\left( {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^n} \right)}_k}} \right], k = 1, 2, \cdots, K} \right\}$小于一个事先定义的判定阈值$\delta $ $(0 < \delta \le 1)$, 那么认为${{\boldsymbol{x}}_t}$不可能处于此等级, 令$P\left[{{\boldsymbol{X}}_i^n|{{\boldsymbol{x}}_t}} \right] = 0$.否则, $P\left[{{\boldsymbol{X}}_i^n|{{\boldsymbol{x}}_t}} \right]$可以根据式(12)获得.
若子块$i$为以定性变量为主的子块, 在子块内, 首先, 对定量变量进行离散化.然后, 从历史数据中得到${{\boldsymbol{x}}_t}$的等价类${[{{\boldsymbol{x}}_t}]_R}$, 其中, $R$为条件属性集合.最后, 根据式(4)计算$[{{\boldsymbol{x}}_t}]$属于子块层第$n$等级的概率:
$ \begin{equation} \label{eq13} P\left( {{\boldsymbol{X}}_i^n|{{\boldsymbol{x}}_t}} \right) = \frac{{\left| {{{[{{\boldsymbol{x}}_t}]}_R} \cap {\boldsymbol{X}}_i^n} \right|}}{{\left| {{{[{{\boldsymbol{x}}_t}]}_R}} \right|}} \end{equation} $
(13) 其中, $n = 1, 2, \cdots, N$, $i = 1, 2, \cdots, I$.
$t$时刻, 子块$i$所处运行状态等级${\hat L_{t, i}}$为:
$ \begin{equation} \label{eq14} {\hat L_{t, i}} = \arg\mathop { \max }\limits_n \left\{ {P\left( {{\boldsymbol{X}}_i^n|{{\boldsymbol{x}}_t}} \right){\kern 1pt} , n = 1, 2, \cdots , N} \right\} \end{equation} $
(14) 3.2 全流程运行状态在线评价
在获得所有子块的子块层运行状态等级后, 全流程层运行状态等级${\hat L_t}$与子块层最劣的子块运行状态等级相等.假设全流程层等级1至$N$, 优性依次递减.那么全流程层运行状态等级${\hat L_t}$表示为:
$ \begin{equation} \label{eq15} {\hat L_t} = \max \left\{ {{{\hat L}_{t, i}}, i = 1, 2, \cdots , I} \right\} \end{equation} $
(15) 显然, 根据子块等级定义, 由于各子块运行状态等级被定义为相似度大于阈值$\varepsilon $的同类数据所能达到的历史最好全流程层等级, 所以全流程层运行状态等级不可能比任何一个子块的运行状态等级更优.也就是说, 全流程层运行状态等级不会比子块层最劣的子块运行状态等级更优.从另一个角度看, 如果全流程层运行状态等级比子块层最劣的子块运行状态等级更劣, 说明全流程层运行状态等级比所有子块运行状态等级都更差.这种情况在实际生产中较少出现, 大部分子块运行状态应与全流程运行状态相一致.所以, 定义全流程层运行状态等级为子块层最劣运行状态等级, 如式(15)所示.
3.3 非优原因追溯
如果全流程层运行状态等级${\hat L_t}$为非优运行状态, 那么需要在非优的子块内进行原因追溯.若子块$i$所处运行状态等级${\hat L_{t, i}}$为非优等级, 那么在该子块内追溯非优原因变量.当前非优数据与最优等级数据进行差异度的比较, 差异大的变量为非优原因变量.
针对以定量变量为主的子块, 用${({\boldsymbol{x}}_i^{{\rm{opt}}})_k} = \left[{{{({\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}} \over{\boldsymbol x} }}_i^{{\rm{opt}}})}_k}, {{({\bar{\boldsymbol \mu }}_i^{{\rm{opt}}})}_k}} \right]$代表最优运行状态的特性, 其中, $k = 1, 2, \cdots, K$.计算非优数据${{\boldsymbol{x}}_t}$与${({\boldsymbol{x}}_i^{{\rm{opt}}})_k}$的相似度${\rm{sim}}\left[{{{\boldsymbol{x}}_t}, {{({\boldsymbol{x}}_i^{{\rm{opt}}})}_k}} \right]$.于是, 可以得到与${{\boldsymbol{x}}_t}$相似度最高的数据, 记为${({\boldsymbol{x}}_i^{{\rm{opt}}})_*}$.定义${{\boldsymbol{x}}_t}$和${({\boldsymbol{x}}_i^{{\rm{opt}}})_*}$中第$j$个变量的差异度为$d\left[{{x_{t, j}}, {{(x_i^{{\rm{opt}}})}_{*, j}}} \right]$, 计算方法与式(9)相同.定义贡献率
$ \begin{equation} \label{eq16} C{R_{t, j}} = \frac{{d\left[ {{x_{t, j}}, {{(x_i^{{\rm{opt}}})}_{*, j}}} \right]}}{{\sum\limits_{j' = 1}^{{J_i}} {d\left[ {{x_{t, j'}}, {{(x_i^{{\rm{opt}}})}_{*, j'}}} \right]} }} \end{equation} $
(16) 其中, $\sum\nolimits_{j = 1}^{{J_i}} {C{R_{t, j}}} = 1$.贡献率$C{R_{t, j}}$较大的变量为非优原因变量.
针对以定性变量为主的子块, 直接在最优运行状态等级历史数据中, 查找与当前非优数据${{\boldsymbol{x}}_t}$相似度最高的数据, 记为${({\boldsymbol{x}}_i^{{\rm{opt}}})_*}$.与上述追溯方法类似, 用式(16)中的公式, 计算变量贡献率, 贡献率较大的属性为非优属性.
4. 基于两层分块PRS-GMM的流程工业过程运行状态评价方法在黄金湿法冶炼过程中的应用
湿法冶金过程是现代工业生产中金属富集、分离与提取的重要手段和技术.湿法冶金, 又称之为化学冶金, 是相对于火法冶金和电解法冶金而言, 一种利用液相环境的特点, 通过一定的化学反应, 进行目标金属的提炼和萃取的技术.黄金湿法冶炼通过液相环境, 将矿石中固相的金, 浸出至矿浆中, 形成液相的金氰络合物离子.在浸出子块中, 氰化钠是一种重要的添加药剂, 并通过影响浸出率来影响综合经济效益.然后, 通过洗涤进行固液分离, 得到矿渣和富含金氰络合物离子的贵液.其中, 贵液经过锌粉, 发生置换反应, 得到金泥.在置换环节中, 锌粉的添加量和质量对运行状态影响较大.
本文将所提评价方法应用于国内某黄金湿法冶炼过程中, 该过程可划分为五个子块:第一次浸出、第一次洗涤、第二次浸出、第二次洗涤和第二次置换, 分别对应子块层的五个子块.两浸两洗的工艺设置是为了提高浸出率.黄金湿法冶炼过程是一个复杂的流程工业过程, 同时包含定量和定性变量.第一次浸出和第二次浸出子块以定量信息为主, 因此, 用GMM对这两个子块进行建模.第一次洗涤和第二次洗涤子块以定性信息为主, 因此, 用PRS对这两个子块进行建模.至于置换子块, 定性和定量信息大量共存, 没有某种信息占主导地位的现象.但是, 其影响优性的关键变量均为定性变量, 故采用PRS对置换子块进行建模.
选取36个过程变量, 列于表 1.根据综合经济效益先将黄金湿法冶炼全流程层运行状态划分为优、中、差3个等级, 分别对应等级1、2、3.从湿法冶金仿真平台, 选取3 000组数据进行离线建模, 其中, 每个等级的数据各1 000组, 建模数据量充分, 可以建立准确的离线模型.然后, 确定每个子块各个等级所包含的数据, 即确定数据子块层等级.根据5个子块的特性, 分别建立GMM或PRS模型.设置相似度判定阈值$\varepsilon = 0.9$.
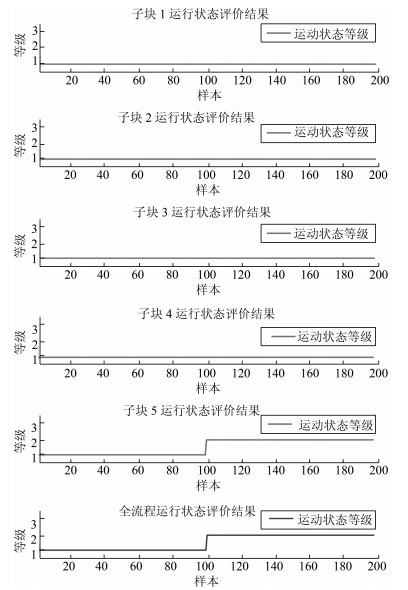
表 1 过程变量列表Table 1 The process variable list序号 指标名称 数据类型 位置 1 第一次浸出前矿石固金品位 定性变量 一次浸出 2 第一次浸出前矿浆浓度 定性变量 一次浸出 3 第一次浸出前调浆水量 定量变量 一次浸出 4 第一次浸出调浆后矿浆流量 定性变量 一次浸出 5 第一次浸出氰化钠添加量 定量变量 一次浸出 6 第一次浸出后氰根离子浓度 定量变量 一次浸出 7 第一次浸出充气量 定量变量 一次浸出 8 第一次浸出溶氧浓度 定量变量 一次浸出 9 第一次浸出后金氰络合物离子浓度 定量变量 一次浸出 10 第一次洗涤前矿浆浓度 定性变量 一次洗涤 11 第一次洗涤前矿浆流量 定性变量 一次洗涤 12 第一次洗涤后贵液流量 定性变量 一次洗涤 13 第一次洗涤后滤饼流量 定性变量 一次洗涤 14 第一次洗涤后金氰络合物离子浓度 定性变量 一次洗涤 15 第二次浸出前矿石固金品位 定性变量 二次浸出 16 第二次浸出前矿浆浓度 定性变量 二次浸出 17 第二次浸出前调浆水量 定性变量 二次浸出 18 第二次浸出调浆后矿浆流量 定量变量 二次浸出 19 第二次浸出氰化钠添加量 定性变量 二次浸出 20 第二次浸出后氰根离子浓度 定量变量 二次浸出 21 第二次浸出充气量 定量变量 二次浸出 22 第二次浸出溶氧浓度 定量变量 二次浸出 23 第二次浸出后金氰络合物离子浓度 定量变量 二次浸出 24 第二次洗涤前矿浆浓度 定性变量 二次洗涤 25 第二次洗涤前矿浆流量 定性变量 二次洗涤 26 第二次洗涤后贵液流量 定性变量 二次洗涤 27 第二次洗涤后滤饼流量 定性变量 二次洗涤 28 第二次洗涤后金氰络合物离子浓度 定量变量 二次洗涤 29 置换前贵液金氰络合物离子浓度 定量变量 置换 30 脱氧塔压力1 定量变量 置换 31 脱氧塔压力2 定量变量 置换 32 脱氧塔压力3 定量变量 置换 33 置换前贵液流量 定性变量 置换 34 锌粉添加量 定性变量 置换 35 锌粉平均粒径 定性变量 置换 36 金泥品位 定性变量 置换 重新选取400组数据进行在线测试, 实验设计如表 2所示.在实验1中, 前100组数据运行状态等级为优(等级1), 后100组数据由于氰化钠添加量2 (子块3, 定量)不足, 导致运行状态等级变为差(等级3).在实验2中, 前100组数据运行状态等级为优, 后100组数据由于锌粉添加量(子块5, 定性)过量, 导致运行状态等级变为中.其中, 在实际生产中, 锌粉添加量只能获得8小时的累积量, 因此, 在本实验中, 将该变量作为定性变量进行处理.用所提方法进行运行状态在线评价和非优原因追溯, 以验证其有效性.
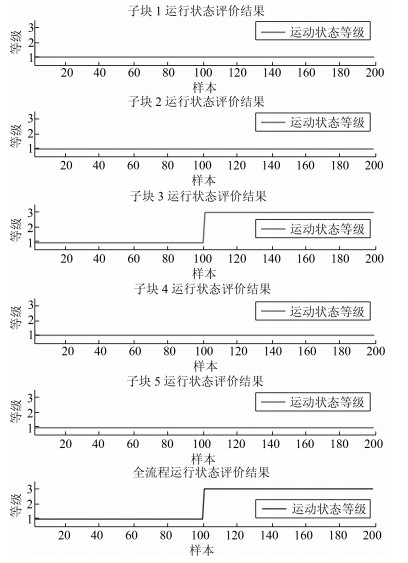
表 2 实验设计Table 2 The experiment design实验 描述 1 前100组数据运行状态等级为优(等级1), 后100组数据由于第二次浸出氰化钠添加量(子块3, 定量)不足, 导致运行状态等级变为差(等级3). 2 前100组数据运行状态等级为优(等级1), 后100组数据由于锌粉添加量(子块5, 定性)过量, 导致运行状态等级变为中(等级2). 实验1的评价结果如图 3所示, 在评价时间内:子块1、2、4、5都处于等级1;子块3前100个评价点处于等级1, 后100个评价点处于等级3;全流程运行状态评价结果为前100个评价点处于等级1, 后100个评价点处于等级3.显然, 评价结果与实际运行状态等级设置一致.从第101个评价点起, 全流程运行状态等级为非优等级, 导致全流程非优的是子块3, 第二次浸出子块.因此, 在子块3中, 进行非优原因追溯.第101个评价点的非优原因追溯结果如图 4所示, 显示非优原因变量有第二次浸出氰化钠添加量、第二次浸出后氰根离子浓度和第二次浸出后金氰络合物离子浓度.事实上, 由于第二次氰化钠添加量不足, 会导致第二次浸出后氰根离子和金氰络合物离子浓度下降.因此, 非优原因追溯结果与实际情况一致.
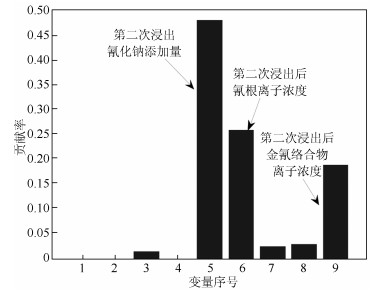 图 4 实验1子块3中非优原因追溯结果Fig. 4 The cause identification result within Sub-block 3 in Case 1
图 4 实验1子块3中非优原因追溯结果Fig. 4 The cause identification result within Sub-block 3 in Case 1实验2的评价结果如图 5所示, 在评价时间内:子块1、2、3、4都处于等级1;子块5前100个评价点处于等级1, 后100个评价点处于等级2;相应的, 全流程评价结果为前100个评价点处于运行状态等级1, 后100个评价点处于等级2.评价结果与实际运行状态等级设置一致.然后, 在非优的子块中, 进行原因追溯.非优的子块为置换子块, 是一个定性建模的子块, 其追溯结果展示于图 6.实际上, 锌粉添加量过多, 置换率已无法再提升, 反而会增加置换物耗, 降低总经济效益, 导致运行状态等级变为非优.
 图 6 实验2子块5中非优原因追溯结果Fig. 6 The cause identification result within Sub-block 5 in Case 2
图 6 实验2子块5中非优原因追溯结果Fig. 6 The cause identification result within Sub-block 5 in Case 2与传统评价方法相比, 两层分块GMM-PRS主要在分层分块和混合模型两方面做了改进.分层分块使得评价难度降低, 解释性强, 可以直接在非优子块中进行原因追溯, 快速定位原因变量.混合模型充分利用不同变量提供的信息, 提高了评价精度.将PRS、两层分块PRS、GMM、两层分块GMM和两层分块GMM-PRS方法分别应用于黄金湿法冶炼过程运行状态评价中, 经过多次试验, 评价准确率均值如表 3所示.其中, 基于PRS的评价, 对全流程建立一个PRS模型; 基于两层分块PRS的评价, 将全流程进行层次和子块的划分, 对每个子块分别建立一个PRS模型; 基于GMM的评价, 针对全流程不同定性变量的组合, 分别建立全流程的GMM; 基于两层分块GMM的评价, 将全流程进行层次和子块的划分, 在子块内, 针对不同定性变量的组合, 分别建立GMM.从准确率的对比可以看出, 相比于PRS、两层分块PRS、GMM方法, 本文所提两层分块GMM-PRS具有明显优势.两层分块GMM方法, 由于应用了本文所提的分层分块和针对不同定性变量组合分别建立GMM的思想, 具有与两层分块GMM-PRS相当的正确率.但是, 相比于两层分块GMM方法, 所提两层分块GMM-PRS具有模型数量少、计算量小、计算时间短的优势.
表 3 不同方法评价准确率对比Table 3 The assessment accuracy rate comparison of different methodsPRS 两层分块
PRSGMM 两层分块
GMM两层分块
GMM-PRS评价准确率 75.3 % 81.0 % 86.2 % 97.6 % 97.9 % 5. 结论
针对定量、定性变量共存的流程工业过程运行状态评价问题, 本文提出了基于两层分块混合模型的评价方法.将流程工业过程, 根据其物理特性划分为运行子块, 同时, 形成了子块层和全流程层, 两个评价层次.在子块层, 对于以定量信息为主的子块, 根据不同的定性变量状态组合, 分别建立GMM.对于以定性信息为主的子块, 将定量变量进行离散化, 建立PRS模型.全流程层运行状态等级由子块层最劣运行状态等级决定.当过程运行于非优运行状态等级, 非优的子块可根据子块运行状态评价结果进行确定.在非优的子块内, 本文提出了基于贡献率的原因追溯方法.最后, 本文将所提方法应用于湿法冶金过程运行状态评价中, 并与传统方法进行了比较.仿真结果证明了所提方法的有效性和优势.
-
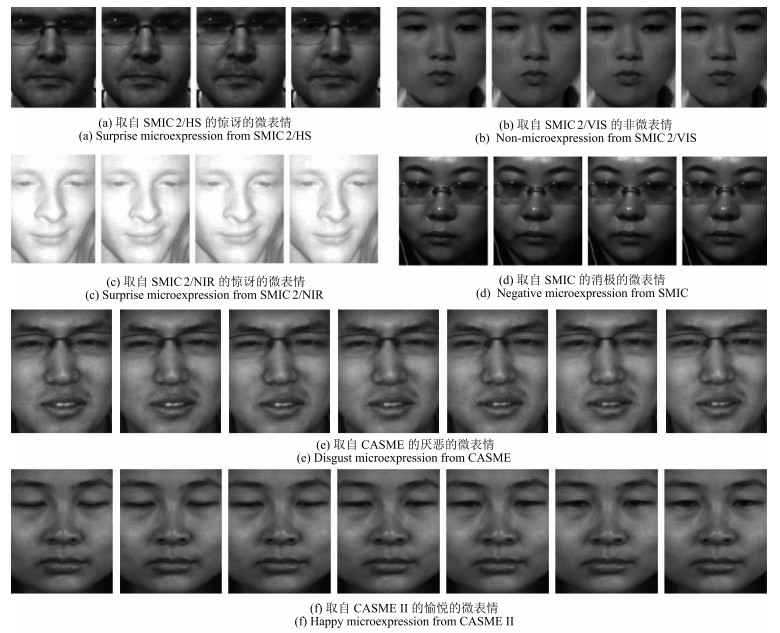
表 1 现有微表情数据集
Table 1 Existing datasets of microexpressions
数据集 帧率 #被试 #微表情 #非微表情 诱导方式 标注方法 SMIC 100 6 76 76 自发 情绪 SMIC2/HS 100 20 164 164 自发 情绪 SMIC2/VIS 25 10 71 71 自发 情绪 SMIC2/NIR 25 10 71 71 自发 情绪 CASME 60 35 195 / 自发 情绪/FACS CASMEⅡ 200 35 247 / 自发 情绪/FACS USF-HD 29.7 / 100 181 模仿 微/非微表情 Polikovsky 200 10 / / 模仿 FACS  下载: 导出CSV
下载: 导出CSV
表 2 现有微表情识别方法的识别准确率 (%) 对比
Table 2 Recognition accuracy (%) of existing approaches on common datasets
方法 CASME CASMEⅡ LBP-TOP[23] 37.43(4类) 46.46(5类) STCLQP[36] 57.31(4类) 58.39(5类) LBP-SIP[37] 36.84(4类) 46.56(5类) DTCM[38] 64.95(4类) N/A TICS[43-44] 61.86(4类) 62.30(4类) STLBP-IP[45] N/A 59.51(5类) FDM[47] 56.14(5类) 45.93(5类) MDMO[48] 64.07(4类) 57.16(4类) DTSA[51] 46.90(5类) N/A MMPTR[54] N/A 80.2(4类) RPCA+LSDF[55] N/A 65.45(4类) Riesz小波[58] N/A 46.15(4类) EVM[59] N/A 67.21(4类)
下载: 导出CSV
表 3 现有微表情识别方法
Table 3 Existing approaches for microexpression recognition
方法 预处理方法 特征表达 学习算法 解决问题 文献[23] ASM、LWM、TIM LBP-TOP SVM、RF、MKL 检测/分类 文献[27, 70] ASM Strain tensor 阈值 检测 文献[28] ASM、面部分块 时空梯度 近邻投票 检测/分类 文献[36] ASM、TIM STCLQP SVM 检测/分类 文献[37] N/A LBP-SIP SVM 检测/分类 文献[38] AAM DTCM SVM、RF 检测/分类 文献[41] ASM Gabor GentlSVM 检测/分类 文献[42] N/A Gabor LDA、PCA、SVM 分类 文献[43-44] ASM TICS+LBP-TOP SVM 检测/分类 文献[45] N/A STLBP-IP SVM 检测/分类 文献[47] 光流场修正 FDM SVM 检测/分类 文献[48] DRMF、光流场对齐 MDMO SVM 检测/分类 文献[51] N/A DTSA变换 ELM 检测/分类 文献[53] ASM STCCA 最近邻 检测/分类 文献[54] N/A MMPTR变换 最近邻 检测/分类 文献[55] ASM、面部分块 RPCA+LSDF SVM 检测/分类 文献[57] 面部检测、分割 CBP-TOP ELM 分类 文献[58] N/A Riesz小波 MKL 分类 文献[59] ASM、LWM、TIM EVM处理后提前特征 SVM 分类 文献[62] N/A 特征点追踪 MKL 特定AU识别 文献[64] STASM、Procuste分析 几何形变特征 随机过程计算概率 检测 文献[66] 特征点定位 基于LBP的差异特征 阈值 检测 文献[67] DRMF 光流场 基于规则 阶段分割 文献[68] CLM CLM、LBP 基于规则 顶点定位 文献[71] N/A 时间平滑的Optical Strain SVM 检测/分类
下载: 导出CSV
-
[1] Shan C F, Gong S G, McOwan P W. Facial expression recognition based on local binary patterns: a comprehensive study. Image and Vision Computing, 2009, 27(6): 803-816 doi: 10.1016/j.imavis.2008.08.005 [2] Rahulamathavan Y, Phan R C W, Chambers J A, Parish D J. Facial expression recognition in the encrypted domain based on local fisher discriminant analysis. IEEE Transactions on Affective Computing, 2013, 4(1): 83-92 doi: 10.1109/T-AFFC.2012.33 [3] Wang S F, Liu Z L, Wang Z Y, Wu G B, Shen P J, He S, Wang X F. Analyses of a multimodal spontaneous facial expression database. IEEE Transactions on Affective Computing, 2013, 4(1): 34-46 doi: 10.1109/T-AFFC.2012.32 [4] 孙晓, 潘汀, 任福继.基于ROI-KNN卷积神经网络的面部表情识别.自动化学报, 2016, 42(6): 883-891 http://www.aas.net.cn/CN/abstract/abstract18879.shtmlSun Xiao, Pan Ting, Ren Fu-Ji. Facial expression recognition using ROI-KNN deep convolutional neural networks. Acta Automatica Sinica, 2016, 42(6): 883-891 http://www.aas.net.cn/CN/abstract/abstract18879.shtml [5] 刘帅师, 田彦涛, 王新竹.基于对称双线性模型的光照鲁棒性人脸表情识别.自动化学报, 2012, 38(12): 1933-1940 http://www.aas.net.cn/CN/abstract/abstract17855.shtmlLiu Shuai-Shi, Tian Yan-Tao, Wang Xin-Zhu. Illumination-robust facial expression recognition based on symmetric bilinear model. Acta Automatica Sinica, 2012, 38(12): 1933-1940 http://www.aas.net.cn/CN/abstract/abstract17855.shtml [6] 刘帅师, 田彦涛, 万川.基于Gabor多方向特征融合与分块直方图的人脸表情识别方法.自动化学报, 2011, 37(12): 1455-1463 http://www.aas.net.cn/CN/abstract/abstract17643.shtmlLiu Shuai-Shi, Tian Yan-Tao, Wan Chuan. Facial expression recognition method based on Gabor multi-orientation features fusion and block histogram. Acta Automatica Sinica, 2011, 37(12): 1455-1463 http://www.aas.net.cn/CN/abstract/abstract17643.shtml [7] Taheri S, Patel V M, Chellappa R. Component-based recognition of faces and facial expressions. IEEE Transactions on Affective Computing, 2013, 4(4): 360-371 doi: 10.1109/T-AFFC.2013.28 [8] El Mostafa M K A, Levine M D. Fully automated recognition of spontaneous facial expressions in videos using random forest classifiers. IEEE Transactions on Affective Computing, 2014, 5(2): 141-154 https://www.researchgate.net/publication/264387505_Fully_Automated_Recognition_of_Spontaneous_Facial_Expressions_in_Videos_Using_Random_Forest_Classifiers [9] Ekman P. Darwin, deception, and facial expression. Annals of the New York Academy of Sciences, 2003, 1000: 205-221 https://www.researchgate.net/publication/8882449_Darwin_Deception_and_Facial_Expression [10] Haggard E A, Isaacs K S. Micromomentary facial expressions as indicators of ego mechanisms in psychotherapy. Methods of Research in Psychotherapy. US: Springer, 1966. 154-165 [11] Ekman P, Friesen W. Nonverbal Leakage and Clues to Deception. Technical Report, DTIC Document, 1969. [12] Gottman J M, Levenson R W. A two-factor model for predicting when a couple will divorce: exploratory analyses using 14-year longitudinal data. Family Process, 2002, 41(1): 83-96 doi: 10.1111/famp.2002.41.issue-1 [13] Salter F, Grammer K, Rikowski A. Sex differences in negotiating with powerful males. Human Nature, 2005, 16(3): 306-321 doi: 10.1007/s12110-005-1013-4 [14] Whitehill J, Serpell Z, Lin Y C, Foster A, Movellan J R. The faces of engagement: automatic recognition of student engagementfrom facial expressions. IEEE Transactions on Affective Computing, 2014, 5(1): 86-98 doi: 10.1109/TAFFC.2014.2316163 [15] Pool L D, Qualter P. Improving emotional intelligence and emotional self-efficacy through a teaching intervention for university students. Learning and Individual Differences, 2012, 22(3): 306-312 doi: 10.1016/j.lindif.2012.01.010 [16] Porter S, ten Brinke L. Reading between the lies: identifying concealed and falsified emotions in universal facial expressions. Psychological Science, 2008, 19(5): 508-514 doi: 10.1111/j.1467-9280.2008.02116.x [17] Warren G, Schertler E, Bull P. Detecting deception from emotional and unemotional cues. Journal of Nonverbal Behavior, 2009, 33(1): 59-69 doi: 10.1007/s10919-008-0057-7 [18] Yan W J, Wu Q, Liang J, Chen Y H, Fu X L. How fast are the leaked facial expressions: the duration of micro-expressions. Journal of Nonverbal Behavior, 2013, 37(4): 217-230 https://www.researchgate.net/publication/245536570_How_Fast_Are_the_Leaked_Facial_Expressions_The_Duration_of_Micro-Expressions [19] Ekman P. MicroExpression Training Tool (METT). University of California, San Francisco, 2002. [20] Frank M G, Herbasz M, Sinuk K, Keller A, Nolan C. I see how you feel: training laypeople and professionals to recognize fleeting emotions. In: Proceedings of the 2009 Annual Meeting of the International Communication Association. New York, 2009. http://www.allacademic.com/meta/p15018_index.htm [21] 吴奇, 申寻兵, 傅小兰.微表情研究及其应用.心理科学进展, 2010, 18(9): 1359-1368 http://www.cnki.com.cn/Article/CJFDTOTAL-XLXD201009002.htmWu Qi, Shen Xun-Bing, Fu Xiao-Lan. Micro-expression and its applications. Advances in Psychological Science, 2010, 18(9): 1359-1368 http://www.cnki.com.cn/Article/CJFDTOTAL-XLXD201009002.htm [22] 贲晛烨, 杨明强, 张鹏, 李娟.微表情自动识别综述.计算机辅助设计与图形学学报, 2014, 26(9): 1385-1395 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJF201409001.htmBen Xian-Ye, Yang Ming-Qiang, Zhang Peng, Li Juan. Survey on automatic micro expression recognition methods. Journal of Computer-Aided Design and Computer Graphics, 2014, 26(9): 1385-1395 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJF201409001.htm [23] Pfister T, Li X B, Zhao G Y, Pietikäinen M. Recognising spontaneous facial micro-expressions. In: Proceedings of the 2011 IEEE International Conference on Computer Vision. Barcelona, Spain: IEEE, 2011. 1449-1456 [24] Li X B, Pfister T, Huang X H, Zhao G Y, Pietikäinen M. A spontaneous micro-expression database: inducement, collection and baseline. In: Proceedings of the 10th IEEE International Conference and Workshops on Automatic Face and Gesture Recognition. Shanghai, China: IEEE, 2013. 1-6 [25] Yan W J, Wu Q, Liu Y J, Wang S J, Fu X L. CASME database: a dataset of spontaneous micro-expressions collected from neutralized faces. In: Proceedings of the 10th IEEE International Conference and Workshops on Automatic Face and Gesture Recognition. Shanghai, China: IEEE, 2013. 1-7 [26] Yan W J, Li X B, Wang S J, Zhao G Y, Liu Y J, Chen Y H, Fu X L. CASME Ⅱ: An improved spontaneous micro-expression database and the baseline evaluation. PLoS One, 2014, 9(1): e86041 http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.685.5991 [27] Shreve M, Godavarthy S, Goldgof D, Sarkar S. Macro-and micro-expression spotting in long videos using spatio-temporal strain. In: Proceedings of the 2011 IEEE International Conference and Workshops on Automatic Face and Gesture Recognition. Santa Barbara, CA, USA: IEEE, 2011. 51-56 [28] Polikovsky S, Kameda Y, Ohta Y. Facial micro-expression detection in hi-speed video based on facial action coding system (FACS). IEICE Transactions on Information and Systems, 2013, E96-D(1): 81-92 doi: 10.1587/transinf.E96.D.81 [29] Ekman P, Friesen W V. Facial Action Coding System. Palo Alto: Consulting Psychologists Press, 1977. [30] Cootes T F, Taylor C J, Cooper D H, Graham J. Active shape models-their training and application. Computer Vision and Image Understanding, 1995, 61(1): 38-59 doi: 10.1006/cviu.1995.1004 [31] Goshtasby A. Image registration by local approximation methods. Image and Vision Computing, 1998, 6(4): 255-261 [32] Zhou Z H, Zhao G Y, Pietikäinen M. Towards a practical lipreading system. In: Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition. Colorado, USA: IEEE, 2011. 137-144 [33] Ojala T, Pietikäinen M, Maenpaa T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(7): 971-987 doi: 10.1109/TPAMI.2002.1017623 [34] Zhao G Y, Pietikäinen M. Dynamic texture recognition using local binary patterns with an application to facial expressions. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 915-928 doi: 10.1109/TPAMI.2007.1110 [35] Huang X H, Zhao G Y, Hong X P, Pietikäinen M, Zheng W M. Texture description with completed local quantized patterns. Image Analysis. Berlin Heidelberg: Springer, 2013. 1-10 [36] Huang X H, Zhao G Y, Hong X P, Zheng W M, Pietikäinen M. Spontaneous facial micro-expression analysis using spatiotemporal completed local quantized patterns. Neurocomputing, 2016, 175: 564-578 doi: 10.1016/j.neucom.2015.10.096 [37] Wang Y D, See J, Phan P C W, Oh Y H. LBP with six intersection points: reducing redundant information in LBP-TOP for micro-expression recognition. In: Proceedings of the 12th Conference on Computer Vision, Singapore. Singapore: Springer, 2014. 21-23 [38] Lu Z Y, Luo Z Q, Zheng H C, Chen J K, Li W H. A delaunay-based temporal coding model for micro-expression recognition. Computer Vision-ACCV Workshops. Switzerland: Springer International Publishing, 2014. [39] Cootes T F, Edwards G J, Taylor C J. Active appearance models. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2001, 23(6): 681-685 doi: 10.1109/34.927467 [40] Barber B C, Dobkin D P, Huhdanpaa H. The quickhull algorithm for convex hulls. ACM Transactions on Mathematical Software, 1996, 22(4): 469-483 doi: 10.1145/235815.235821 [41] Wu W, Shen X B, Fu X L. The machine knows what you are hiding: an automatic micro-expression recognition system. In: Proceedings of the 4th International Conference on Affective Computing and Intelligent Interaction. Memphis, TN, USA: Springer-Verlag, 2011. 152-162 [42] Zhang P, Ben X Y, Yan R, Wu C, Guo C. Micro-expression recognition system. Optik——International Journal for Light and Electron Optics, 2016, 127(3): 1395-1400 https://www.researchgate.net/publication/283746871_Micro-Expression_Recognition_System [43] Wang S J, Yan W J, Li X B, Zhao G Y, Fu X L. Micro-expression recognition using dynamic textures on tensor independent color space. In: Proceedings of the 22nd International Conference on Pattern Recognition. Stockholm, Sweden: IEEE, 2014. 4678-4683 [44] Wang S J, Yan W J, Li X B, Zhao G Y, Zhou C G, Fu X L, Yang M H, Tao J H. Micro-expression recognition using color spaces. IEEE Transactions on Image Processing, 2015, 24(12): 6034-6047 https://www.ncbi.nlm.nih.gov/pubmed/26540689 [45] Huang X H, Wang S J, Zhao G Y, Piteikäinen M. Facial micro-expression recognition using spatiotemporal local binary pattern with integral projection. In: Proceedings of the 2015 IEEE International Conference on Computer Vision Workshops. Santiago, Chile: IEEE, 2015. 1-9 [46] Houam L, Hafiane A, Boukrouche A, Lespessailles E, Jennane R. One dimensional local binary pattern for bone texture characterization. Pattern Analysis and Applications, 2014, 17(1): 179-193 doi: 10.1007/s10044-012-0288-4 [47] Xu F, Zhang J P, Wang J Z. Microexpression identification and categorization using a facial dynamics map. IEEE Transactions on Affective Computing, PP(99): 1-1, DOI: 10.1109/TAFFC.2016.2518162 [48] Liu Y J, Zhang J K, Yan W J, Wang S J, Zhao G Y, Fu X L. A main directional mean optical flow feature for spontaneous micro-expression recognition. IEEE Transactions on Affective Computing, 2016, 7(4): 299-310 doi: 10.1109/TAFFC.2015.2485205 [49] Asthana A, Zafeiriou S, Cheng S Y, Pantic M. Robust discriminative response map fitting with constrained local models. In: Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition. Portland, OR, USA: IEEE, 2013. 3444-3451 [50] Chaudhry R, Ravichandran A, Hager G, Vidal R. Histograms of oriented optical flow and binet-cauchy kernels on nonlinear dynamical systems for the recognition of human actions. In: Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition. Miami, Florida: IEEE, 2009. 1932-1939 [51] Wang S J, Chen H L, Yan W J, Chen Y H, Fu X L. Face recognition and micro-expression recognition based on discriminant tensor subspace analysis plus extreme learning machine. Neural Processing Letters, 2014, 39(1): 25-43 https://www.researchgate.net/publication/236120483_Face_Recognition_and_Micro-expression_Recognition_Based_on_Discriminant_Tensor_Subspace_Analysis_Plus_Extreme_Learning_Machine [52] Huang G B, Zhu Q Y, Siew C K. Extreme learning machine: theory and applications. Neurocomputing, 2006, 70(1-3): 489-501 doi: 10.1016/j.neucom.2005.12.126 [53] Wang S J, Yan W J, Sun T K, Zhao G Y, Fu X L. Sparse tensor canonical correlation analysis for micro-expression recognition. Neurocomputing, 2016, 214: 218-232 doi: 10.1016/j.neucom.2016.05.083 [54] Ben X Y, Zhang P, Yan R, Yang M Q, Ge G D. Gait recognition and micro-expression recognition based on maximum margin projection with tensor representation. Neural Computing and Applications, 2015, 127(3): 1-18 https://www.researchgate.net/publication/283903772_Gait_recognition_and_micro-expression_recognition_based_on_maximum_margin_projection_with_tensor_representation [55] Wang S J, Yan W J, Zhao G Y, Fu X L, Zhou C G. Micro-expression recognition using robust principal component analysis and local spatiotemporal directional features. Computer Vision——ECCV 2014 Workshops. Switzerland: Springer International Publishing, 2014. [56] Fu X F, Wei W. Centralized binary patterns embedded with image euclidean distance for facial expression recognition. In: Proceedings of the 4th International Conference on Natural Computation. Jinan, China: IEEE, 2008. 115-119 [57] Guo Y C, Xue C H, Wang Y Z, Yu M. Micro-expression recognition based on CBP-TOP feature with ELM. Optik——International Journal for Light and Electron Optics, 2015, 126(23): 4446-4451 doi: 10.1016/j.ijleo.2015.08.167 [58] Oh Y H, Le Ngo A C, See J, Liong S T, Phan R C W, Ling H C. Monogenic riesz wavelet representation for micro-expression recognition. In: Proceedings of the 2015 IEEE International Conference on Digital Signal Processing. Singapore: IEEE, 2015. 1237-1241 [59] Li X B, Hong X P, Moilanen A, Huang X H, Pfister T, Zhao G Y, Pietikäinen M. Reading hidden emotions: spontaneous micro-expression spotting and recognition. arXiv Preprint arXiv: 1511.00423 [Online], available: https://arxiv.org/abs/1511.00423, February 20, 2017 [60] Wu H Y, Rubinstein M, Shih E, Guttag J, Durand F, Freeman W T. Eulerian video magnification for revealing subtle changes in the world. ACM Transactions on Graphics, 2012, 31(4): 65 https://www.researchgate.net/publication/254461914_Eulerian_Video_Magnification_for_Revealing_Subtle_Changes_in_the_World [61] Chavali G K, Bhavaraju S K N V, Adusumilli T, Puripanda V. Micro-expression Extraction for Lie Detection Using Eulerian Video (Motion and Color) Magnication [Master dissertation], Blekinge Institute of Technology, Swedish, 2014. [62] Yao S Q, He N, Zhang H Q, Yoshie O. Micro-expression recognition by feature points tracking. In: Proceedings of the 10th International Conference on Communications. Bucharest, Romania: IEEE, 2014. 1-4 [63] Kalal Z, Mikolajczyk K, Matas J. Tracking-learning-detec-tion. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(7): 1409-1422 doi: 10.1109/TPAMI.2011.239 [64] Xia Z Q, Feng X Y, Peng J Y, Peng X L, Zhao G Y. Spontaneous micro-expression spotting via geometric deformation modeling. Computer Vision and Image Understanding, 2016, 147: 87-94 doi: 10.1016/j.cviu.2015.12.006 [65] Milborrow S, Nicolls F. Active shape models with SIFT descriptors and MARS. In: Proceedings of the 2014 International Conference on Computer Vision Theory and Applications. Lisbon, Portugal: IEEE, 2014. 380-387 [66] Moilanen A, Zhao G Y, Pietikäinen M. Spotting rapid facial movements from videos using appearance-based feature difference analysis. In: Proceedings of the 2nd International Conference on Pattern Recognition. Stockholm, Sweden: IEEE, 2014. 1722-1727 [67] Patel D, Zhao G Y, Pietikäinen M. Spatiotemporal integration of optical flow vectors for micro-expression detection. Advanced Concepts for Intelligent Vision Systems. Switzerland: Springer International Publishing, 2015. 369-380 [68] Yan W J, Wang S J, Chen Y H, Zhao G Y, Fu X L. Quantifying micro-expressions with constraint local model and local binary pattern. Computer Vision——ECCV 2014 Workshops. Switzerland: Springer International Publishing, 2014. [69] Cristinacce D, Cootes T F. Feature detection and tracking with constrained local models. In: Proceedings of the 2006 BMVC. Edinburgh: BMVA, 2006. 929-938 [70] Shreve M, Godavarthy S, Manohar V, Goldgof D, Sarkar S. Towards macro-and micro-expression spotting in video using strain patterns. In: Proceedings of the 2009 IEEE Workshop on Applications of Computer Vision. Snowbird, UT, USA: IEEE, 2009. 1-6 [71] Liong S T, Phan R C W, See J, Oh Y H, Wong K. Optical strain based recognition of subtle emotions. In: Proceedings of the 2014 International Symposium on Intelligent Signal Processing and Communication Systems. Kuching, Sarawak, Malaysia: IEEE, 2014. 180-184 [72] House C, Meyer R. Preprocessing and descriptor features for facial micro-expression recognition [Online], available: https://web.stanford.edu/class/ee368/Project_Spring_1415/Reports/House_Meyer.pdf, February 20, 2017 期刊类型引用(5)
1. 褚菲,郝莉莉,王福利. 复杂工业过程运行状态评价方法回顾与展望. 控制与决策. 2024(03): 705-718 .  百度学术
百度学术2. 杜胜,吴敏,陈略峰,PEDRYCZ Witold. 基于粒度聚类的铁矿石烧结过程运行性能评价. 自动化学报. 2023(06): 1272-1282 . 本站查看3. 马亮,彭开香. 带钢热轧全流程质量建模与异常溯源的研究现状与展望. 冶金自动化. 2022(06): 16-24 . 百度学术4. 褚菲,傅逸灵,赵旭,王佩,尚超,王福利. 基于ISDAE模型的复杂工业过程运行状态评价方法及应用. 自动化学报. 2021(04): 849-863 . 本站查看5. 赵春晖,余万科,高福荣. 非平稳间歇过程数据解析与状态监控——回顾与展望. 自动化学报. 2020(10): 2072-2091 . 本站查看其他类型引用(11)
-

 下载:
下载:


计量
- 文章访问数: 11329
- HTML全文浏览量: 2916
- PDF下载量: 4900
- 被引次数: 16
