

Distance Regularized Level Set Image Segmentation Algorithm by Means of Dislocation Theory
-
摘要: 把材料科学中的位错理论引入到水平集方法中.图像中水平集曲线的演化被看作刃位错中位错线的滑移过程,运用位错动力学机制推导出驱使水平集曲线演化的位错组态力.结合距离正则化水平集方法,把水平集方法的边缘检测函数替换为基于位错动力学理论的速度停止函数,并构建了新的距离正则化水平集函数演化方程.水平集曲线在位错组态力和速度停止函数的驱使下移动.位错组态力反映了单位长度曲线上的平均受力情况,不仅包括了图像梯度信息,也包括了位错组态力的作用范围等信息,因此可以有效地避免在局部图像梯度异常的情况下发生曲线停止演进的现象,或者避免在弱边缘处由于图像梯度较小发生局部边界泄漏的现象.实验结果表明,本文算法对弱边缘图像具有较好的分割效果.Abstract: Dislocation theory of materials science is introduced into the level set method. Curve evolution of the level set method is viewed as a slipping process of edge dislocation, and the evolution of zero level set is driven by the dislocation configuration force which is derived from the dislocation dynamics mechanism. Combined with distance regularized level set method, the edge indicator function is replaced by the speed stopping function, and a new evolution equation of distance regularized level set method is constructed with the dislocation theory. In the proposed algorithm, the dislocation configuration force and the speed stopping function drive the curve evolution of level set. The dislocation configuration force reflects the average force on the unit length curve, not only including the gradient information of image but also including the information of the effective range of the dislocation configuration force. The proposed algorithm can effectively avoid the phenomenon that the level set function stops evolution because of abnormal image gradient, and the phenomenon of boundary leakage because of the smaller image gradient. Experimental results show that the proposed algorithm has good segmentation performance for images with weak boundaries.
-
Key words:
- Image segmentation /
- level set method /
- dislocation /
- distance regularized evolution
1) 本文责任编委 张长水 -
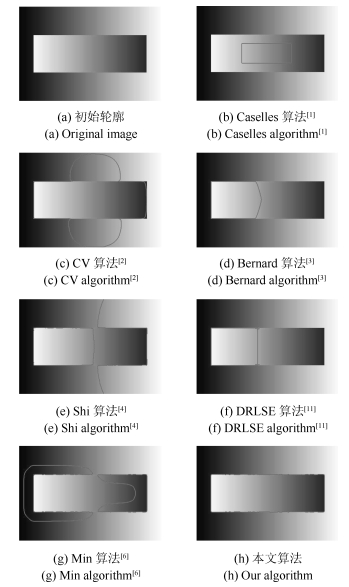
图 6 弱边缘图像分割对比实验结果
Fig. 6 The comparison of experimental results of weak boundary image segmentation
表 1 图 6所示实验中各算法的迭代次数和运算时间的对比
Table 1 The comparison of the iteration number and the operation time for the experiments shown in Fig. 6
 下载: 导出CSV
下载: 导出CSV
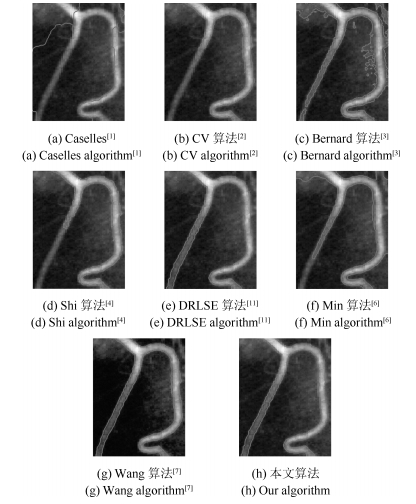
表 2 图 7所示实验中各算法的迭代次数、运算时间、面积重叠误差以及边界平均距离的对比
Table 2 The comparison of the iteration number, the operation time, area overlap error, and average boundary distance for the experiments shown in Fig. 7
算法 迭代次数 运算时间(秒) $E_{\rm overlap}$ $D_{\rm mean}$ Caselles[1] 5 000 159.536302 - - CV[2] 2 915 103.690744 21.19 $\%$ 13.62 Bernard[3] 18 121.678605 14.68 $\%$ 9.54 Shi[4] 798 184.167387 18.81 $\%$ 11.71 DRLSE[11] 2 320 383.120423 0.42 $\%$ 0.31 Min[6] 500 71.325241 - - Wang[7] 2 032 258.625021 0.65 $\%$ 0.48 本文算法 1 865 285.869702 0.36 $\%$ 0.27
下载: 导出CSV
-
[1] Caselles V, Kimmel R, Sapiro G. Geodesic active contours. International Journal of Computer Vision, 1997, 22(1):61-79 doi: 10.1023/A:1007979827043 [2] Chan T F, Vese L A. Active contours without edges. IEEE Transactions on Image Processing, 2001, 10(2):266-277 http://dl.acm.org/citation.cfm?id=2320071 [3] Bernard O, Friboulet D, Thévenaz P, Unser M. Variational b-spline level-set:a linear filtering approach for fast deformable model evolution. IEEE Transactions on Image Processing, 2009, 18(6):1179-1191 doi: 10.1109/TIP.2009.2017343 [4] Shi Y G, Karl W C. A real-time algorithm for the approximation of level-set-based curve evolution. IEEE Transactions on Image Processing, 2008, 17(5):645-656 doi: 10.1109/TIP.2008.920737 [5] Li C M, Huang R, Ding Z H, Gatenby J C, Metaxas D N, Gore J C. A level set method for image segmentation in the presence of intensity inhomogeneities with application to MRI. IEEE Transactions on Image Processing, 2011, 20(7):2007-2016 doi: 10.1109/TIP.2011.2146190 [6] Min H, Jia W, Wang X F, Zhao Y, Hu R X, Luo Y T, Xue F, Lu J T. An intensity-texture model based level set method for image segmentation. Pattern Recognition, 2015, 48(4):1547-1562 doi: 10.1016/j.patcog.2014.10.018 [7] Wang X F, Min H, Zou L, Zhang Y G. A novel level set method for image segmentation by incorporating local statistical analysis and global similarity measurement. Pattern Recognition, 2015, 48(1):189-204 doi: 10.1016/j.patcog.2014.07.008 [8] Zhao Y Q, Wang X H, Wang X F, Shih F Y. Retinal vessels segmentation based on level set and region growing. Pattern Recognition, 2014, 47(7):2437-2446 doi: 10.1016/j.patcog.2014.01.006 [9] 周则明, 孟勇, 黄思训, 胡宝鹏.基于能量最小化的星载SAR图像建筑物分割方法.自动化学报, 2016, 42(2):279-289 http://www.aas.net.cn/CN/abstract/abstract18817.shtmlZhou Ze-Ming, Meng Yong, Huang Si-Xun, Hu Bao-Peng. Building segmentation of spaceborne SAR images based on energy minimization. Acta Automatica Sinica, 2016, 42(2):279-289 http://www.aas.net.cn/CN/abstract/abstract18817.shtml [10] 张迎春, 郭禾.基于粗糙集和新能量公式的水平集图像分割.自动化学报, 2015, 41(11):1913-1925 http://www.aas.net.cn/CN/abstract/abstract18766.shtmlZhang Ying-Chun, Guo He. Level set image segmentation based on rough set and new energy formula. Acta Automatica Sinica, 2015, 41(11):1913-1925 http://www.aas.net.cn/CN/abstract/abstract18766.shtml [11] Adalsteinsson D, Sethian J A. A fast level set method for propagating interfaces. Journal of Computational Physics, 1995, 118(2):269-277 doi: 10.1006/jcph.1995.1098 [12] Li C M, Kao C Y, Gore J C, Ding Z H. Minimization of region-scalable fitting energy for image segmentation. IEEE Transactions on Image Processing, 2008, 17(10):1940-1949 doi: 10.1109/TIP.2008.2002304 [13] Li C M, Xu C Y, Gui C F, Fox M D. Distance regularized level set evolution and its application to image segmentation. IEEE Transactions on Image Processing, 2010, 19(12):3243-3254 doi: 10.1109/TIP.2010.2069690 [14] Lemoine G, Delannay L, Idrissi H, Colla M S, Pardoen T. Dislocation and back stress dominated viscoplasticity in freestanding sub-micron Pd films. Acta Materialia, 2016, 111:10-21 doi: 10.1016/j.actamat.2016.03.038 [15] Nagasako N, Asahi R, Isheim D, Seidman D N, Kuramoto S, Furuta T. Microscopic study of gum-metal alloys:a role of trace oxygen for dislocation-free deformation. Acta Materialia, 2016, 105:347-354 doi: 10.1016/j.actamat.2015.12.011 [16] Guiu F. The stress dependence of the dislocation velocity in molybdenum. Physica Status Solidi, 2016, 25(1):203-207 http://www.researchgate.net/publication/243143363_The_stress_dependence_of_the_dislocation_velocity_in_molybdenum [17] Yuan R, Beyerlein I J, Zhou C Z. Statistical dislocation activation from grain boundaries and its role in the plastic anisotropy of nanotwinned copper. Acta Materialia, 2016, 110:8-18 doi: 10.1016/j.actamat.2016.02.064 [18] Luo Y S, Chung A C S. Nonrigid image registration with crystal dislocation energy. IEEE Transactions on Image Processing, 2013, 22(1):229-243 http://ieeexplore.ieee.org/document/6220249/ [19] Xiang Y, Chung A C S, Ye J. An active contour model for image segmentation based on elastic interaction. Journal of Computational Physics, 2006, 219(1):455-476 doi: 10.1016/j.jcp.2006.03.026 [20] Badakhshannoory H, Saeedi P. A model-based validation scheme for organ segmentation in CT scan volumes. IEEE Transactions on Biomedical Engineering, 2011, 58(9):2681-2693 doi: 10.1109/TBME.2011.2161987 [21] Heimann T, van Ginneken B, Styner M A, Arzhaeva Y, Aurich V, Bauer C, et al. Comparison and evaluation of methods for liver segmentation from CT datasets. IEEE Transactions on Medical Imaging, 2009, 28(8):1251-1265 doi: 10.1109/TMI.2009.2013851 [22] Zhang K H, Zhang L, Yang M H. Fast compressive tracking. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(10):2002-2015 doi: 10.1109/TPAMI.2014.2315808 -

 下载:
下载:



计量
- 文章访问数: 2328
- HTML全文浏览量: 331
- PDF下载量: 929
- 被引次数: 0
