

-
摘要: 对于串联弹性驱动器(Series elastic actuator,SEA)而言,已有方法大都将其弹性组件视为线性弹簧.然而为了追求更高的能量密度,SEA的机械结构越来越复杂,使其控制问题更具挑战性;此外,现有方法均未考虑当SEA应用于交互系统中,其负载端动力学模型会产生剧烈变化的情况.针对这些问题,本文设计了一种面向交互应用的自适应滑模控制方法.具体而言,首先在考虑了非线性SEA输出特性及系统中可能存在的扰动的情况下,描述了SEA系统的动力学方程,并对其进行了分析和变换.在此基础上设计了负载运动观测器和自适应滑模控制器,使得本文方法能够在负载端动力学模型完全未知的情况下完成SEA的力矩控制.最后通过引入辅助系统,对输入饱和的情况进行了有效的处理.通过理论分析证明了闭环控制系统的稳定性及信号有界性,随后的仿真与实验结果也表明了这种自适应滑模控制器良好的控制性能和对不确定性因素的鲁棒性.Abstract: For series elastic actuator (SEA) systems, most existing methods treat the mechanical component as a linear spring. However, in order to achieve high energy density, mechanical structures of SEAs are becoming more and more complex, which makes the control problem more challenging. Additionally, currently available approaches cannot guarantee the control performance when the payload dynamics changes drastically during the interaction process. To deal with these problems, an adaptive sliding-mode control method is proposed for interaction applications. Specifically, by taking account of nonlinear SEAs and disturbances, the dynamics of SEA systems is uniformly described and transformed. Then, an observer and adaptive sliding mode controller are designed and they work well even in the presence of unknown payload dynamics. Finally, an auxiliary system is designed to deal with the saturation problem. Stability and boundedness of the closed-loop signal is ensured mathematically. Subsequent experiment results also demonstrate that the designed controller is robust against system uncertainties and can achieve a superior performance for SEA torque control.1) 本文责任编委 孙希明
-
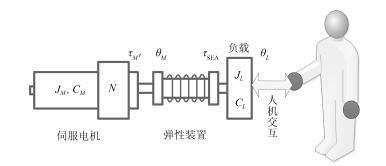
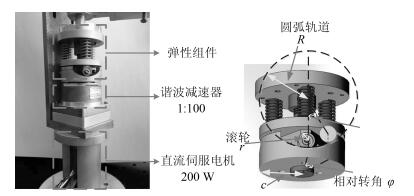
图 3 单关节SEA交互机器人示意图
Fig. 3 Schematic representation of the single SEA interaction robot system
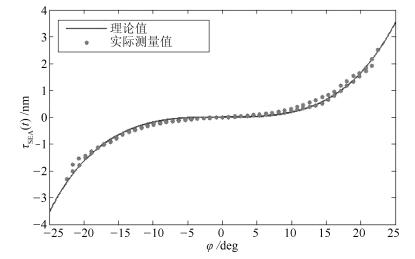
表 1 SEA机械参数
Table 1 The mechanical parameters of the SEA
Parameter Value Ks 13 600 N/m c 0.018 m R 0.020 m r 0.005 m  下载: 导出CSV
下载: 导出CSV
表 2 本文控制器的控制参数
Table 2 The parameters of the proposed controller
Parameter Value l1, l2 10, 50 Γ1, Γ2, Γ3 20, 20, 10 λ 15 k, k1 20, 5 ρ 5 ε 1
下载: 导出CSV
-
[1] Pratt G A, Williamson M M. Series elastic actuators. In:Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Pittsburgh, PA, USA:IEEE, 1995. 399-406 [2] 谭民, 王硕.机器人技术研究进展.自动化学报, 2013, 39(7):963-972 http://www.aas.net.cn/CN/abstract/abstract18124.shtmlTan Min, Wang Shuo. Research progress on robotics. Acta Automatica Sinica, 2013, 39(7):963-972 http://www.aas.net.cn/CN/abstract/abstract18124.shtml [3] Vallery H, Veneman J, van Asseldonk E, Ekkelenkamp R, Buss M, van Der Kooij H. Compliant actuation of rehabilitation robots. IEEE Robotics & Automation Magazine, 2008, 15(3):60-69 http://ieeexplore.ieee.org/document/4624584/ [4] Sulzer J S, Roiz R A, Peshkin M A, Patton J L. A highly backdrivable, lightweight knee actuator for investigating gait in stroke. IEEE Transactions on Robotics, 2009, 25(3):539-548 doi: 10.1109/TRO.2009.2019788 [5] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群.下肢康复机器人及其交互控制方法.自动化学报, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtmlHu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and interactive control methods. Acta Automatica Sinica, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtml [6] Pratt G A, Willisson P, Bolton C, Hofman A. Late motor processing in low-impedance robots:impedance control of series-elastic actuators. In:Proceedings of the 2004 American Control Conference. Boston, MA, USA:IEEE, 2004. 3245-3251 [7] Wyeth G. Demonstrating the safety and performance of a velocity sourced series elastic actuator. In:Proceedings of the 2008 IEEE International Conference on Robotics and Automation. Pasadena, CA, USA:IEEE, 2008. 3642-3647 [8] Vallery H, Ekkelenkamp R, Van Der Kooij H, Buss M. Passive and accurate torque control of series elastic actuators. In:Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA:IEEE, 2007. 3534-3538 [9] Tagliamonte N L, Accoto D. Passivity constraints for the impedance control of series elastic actuators. Proceedings of the Institution of Mechanical Engineers, Part I:Journal of Systems and Control Engineering, 2014, 228(3):138-153 doi: 10.1177/0959651813511615 [10] Oblak J, Matjačić Z. On stability and passivity of haptic devices characterized by a series elastic actuation and considerable end-point mass. In:Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics. Zurich, Switzerland:IEEE, 2011. 1-5 [11] dos Santos W M, Siqueira A A G. Impedance control of a rotary series elastic actuator for knee rehabilitation. In:Preprints of the 19th World Congress, The International Federation of Automatic Control. Cape Town, South Africa:IFAC, 2014. 4801-4806 [12] Tagliamonte N L, Accoto D, Guglielmelli E. Rendering viscoelasticity with series elastic actuators using cascade control. In:Proceedings of the 2014 IEEE International Conference on Robotics and Automation. Hong Kong, China:IEEE, 2014. 2424-2429 [13] dos Santos W. M, Caurin G. A. P, Siqueira A. A. G, Design and control of an active knee orthosis driven by a rotary series elastic actuator, Control Engineering Practice, 2017, 58(1):307-318 http://www.sciencedirect.com/science/article/pii/S0967066115300198 [14] Kong K, Bae J, Tomizuka M. Control of rotary series elastic actuator for ideal force-mode actuation in human-robot interaction applications. IEEE/ASME Transactions on Mechatronics, 2009, 14(1):105-118 doi: 10.1109/TMECH.2008.2004561 [15] Kong K, Bae J, Tomizuka M. A compact rotary series elastic actuator for human assistive systems. IEEE/ASME Transactions on Mechatronics, 2012, 17(2):288-297 doi: 10.1109/TMECH.2010.2100046 [16] Calanca A, Fiorini P. Human-adaptive control of series elastic actuators. Robotica, 2014, 32(8):1301-1316 doi: 10.1017/S0263574714001519 [17] Calanca A, Capisani L, Fiorini P. Robust force control of series elastic actuators. Actuators, 2014, 3(3):182-204 doi: 10.3390/act3030182 [18] Yoo S, Chung W K. SEA force/torque servo control with model-based robust motion control and link-side motion feedback. In:Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Seattle, WA, USA:IEEE, 2015. 1042-1048 [19] Misgeld B J E, Pomprapa A, Leonhardt S. Robust control of compliant actuators using positive real H2-controller synthesis. In:Proceedings of the 2014 American Control Conference. Portland, OR, USA:IEEE, 2014. 5477-5483 [20] 朱秋国, 熊蓉, 吕铖杰, 毛翊超.新型串联弹性驱动器设计与速度控制.电机与控制学报, 2015, 19(6):83-88 http://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201506014.htmZhu Qiu-Guo, Xiong Rong, Lv Cheng-Jie, Mao Yi-Chao. Novel series elastic actuator design and velocity control. Electric Machines and Control, 2015, 19(6):83-88 http://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201506014.htm [21] Ames A D, Holley J. Quadratic program based nonlinear embedded control of series elastic actuators. In:Proceedings of the 53rd IEEE Conference on Decision and Control. Los Angeles, CA, USA:IEEE, 2014. 6291-6298 [22] Powell M J, Ames A D. Hierarchical control of series elastic actuators through control Lyapunov functions. In:Proceedings of the 53rd IEEE Conference on Decision and Control. Los Angeles, CA, USA:IEEE, 2014. 2986-2992 [23] Wolf S, Hirzinger G. A new variable stiffness design:matching requirements of the next robot generation. In:Proceedings of the 2008 IEEE International Conference on Robotics and Automation. Pasadena, CA, USA:IEEE, 2008. 1741-1746 [24] Jafari A, Tsagarakis N G, Caldwell D G. A novel intrinsically energy efficient actuator with adjustable stiffness (AwAS). IEEE/ASME Transactions on Mechatronics, 2013, 18(1):355-365 doi: 10.1109/TMECH.2011.2177098 [25] Furnémont R, Mathijssen G, van der Hoeven T, Brackx B, Lefeber D, Vanderborght B. Torsion MACCEPA:A novel compact compliant actuator designed around the drive axis. In:Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Seattle, WA, USA:IEEE, 2015. 232-237 [26] Laffranchi M, Chen L S, Kashiri N, Lee J, Tsagarakis N G, Caldwell D G. Development and control of a series elastic actuator equipped with a semi active friction damper for human friendly robots. Robotics and Autonomous Systems, 2014, 62(12):1827-1836 doi: 10.1016/j.robot.2014.06.007 [27] Austin J, Schepelmann A, Geyer H. Control and evaluation of series elastic actuators with nonlinear rubber springs. In:Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg, Germany:IEEE, 2015. 6563-6568 [28] Palli G, Melchiorri C. On the control of redundant robots with variable stiffness actuation. In:Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Algarve, Portugal:IEEE, 2012. 5077-5082 [29] Yu H Y, Huang S, Chen G, Pan Y P, Guo Z. Human-robot interaction control of rehabilitation robots with series elastic actuators. IEEE Transactions on Robotics, 2015, 31(5):1089-1100 doi: 10.1109/TRO.2015.2457314 [30] Garabini M, Passaglia A, Belo F, Salaris P, Bicchi A. Optimality principles in stiffness control:the VSA kick. In:Proceedings of the 2012 IEEE International Conference on Robotics and Automation. Saint Paul, MN, USA:IEEE, 2012. 3341-3346 [31] Braun D, Howard M, Vijayakumar S. Optimal variable stiffness control:formulation and application to explosive movement tasks. Autonomous Robots, 2012, 33(3):237-253 doi: 10.1007/s10514-012-9302-3 [32] Lee J, Laffranchi M, Kashiri N, Tsagarakis N G, Caldwell D G. Model-free force tracking control of piezoelectric actuators:application to variable damping actuator. In:Proceedings of the 2014 IEEE International Conference on Robotics and Automation. Hong Kong, China:IEEE, 2014. 2283-2289 [33] Lee J, Jin M, Tsagarakis N G, Caldwell D G. Terminal sliding-mode based force tracking control of piezoelectric actuators for variable physical damping system. In:Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, IL, USA:IEEE, 2014. 2407-2413 [34] Wang M, Sun L, Yin W, Dong S, Liu J T. A novel sliding mode control for series elastic actuator torque tracking with an extended disturbance observer. In:Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics. Zhuhai, China:IEEE, 2015. 2407-2412 [35] Dong S, Zhou L, Wang M, Sun L. Variable stiffness estimation of a series elastic actuator. In:Proceedings of the 2016 Chinese Control Conference. Chengdu, China:IEEE, 2016. 2114-2119 [36] 于哲, 王璐, 苏剑波.基于干扰观测器的不确定线性多变量系统控制.自动化学报, 2014, 40(11):2643-2649 http://www.aas.net.cn/CN/abstract/abstract18542.shtmlYu Zhe, Wang Lu, Su Jian-Bo. Disturbance observer based control for linear multi-variable systems with uncertainties. Acta Automatica Sinica, 2014, 40(11):2643-2649 http://www.aas.net.cn/CN/abstract/abstract18542.shtml [37] Chen W H. Disturbance observer based control for nonlinear systems. IEEE/ASME Transactions on Mechatronics, 2004, 9(4):706-710 doi: 10.1109/TMECH.2004.839034 [38] Li S H, Yang J, Chen W H, Chen X S. Disturbance Observer-Based Control:Methods and Applications. Boca Raton, FL:CRC Press, 2014. [39] 陈晓平, 和卫星, 傅海军.线性系统理论.北京:机械工业出版社, 2011.Chen Xiao-Ping, He Wei-Xing, Fu Hai-Jun. Linear Systems Theory. Beijing:China Machine Press, 2011. [40] 张扬名, 闫鹏.线性电机伺服系统的自适应鲁棒控制.控制理论与应用, 2015, 32(3):287-294 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201503002.htmZhang Yang-Ming, Yan Peng. Adaptive robust control for linear motor servo systems. Control Theory & Applications, 2015, 32(3):287-294 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201503002.htm [41] Chen M, Ge S S, Ren B B. Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints. Automatica, 2011, 47(3):452-465 doi: 10.1016/j.automatica.2011.01.025 [42] Bae J, Kong K, Tomizuka M. Gait phase-based smoothed sliding mode control for a rotary series elastic actuator installed on the knee joint. In:Proceedings of the 2010 American Control Conference. Baltimore, MD, USA:IEEE, 2010. 6030-6035 -

 下载:
下载:

图(10) / 表(2)
计量
- 文章访问数: 2169
- HTML全文浏览量: 362
- PDF下载量: 907
- 被引次数: 0
