

-
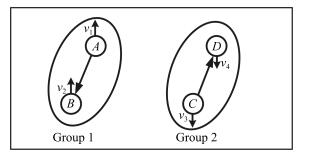
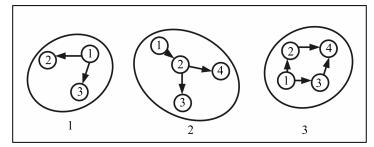
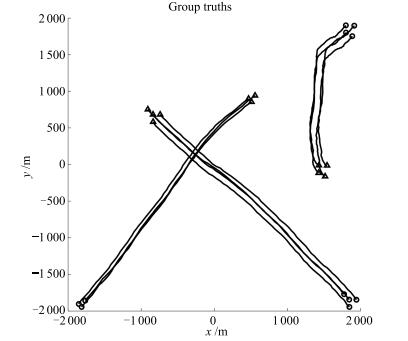
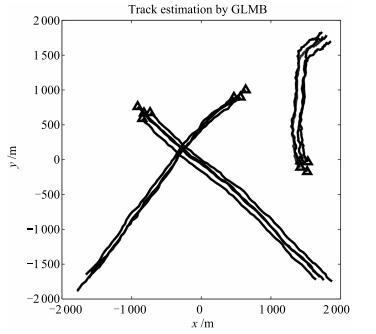
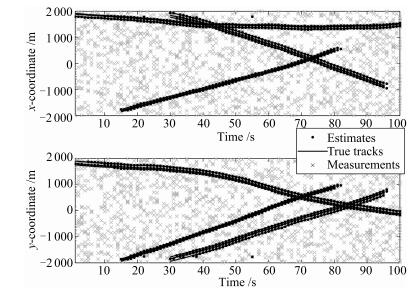
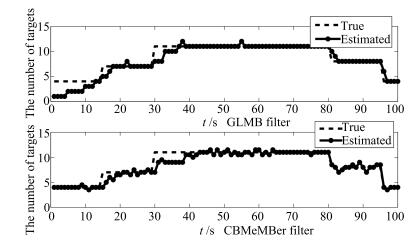
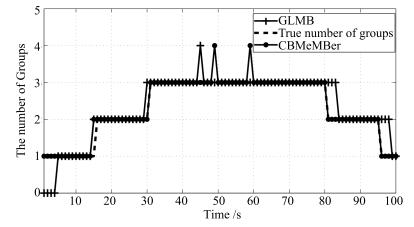
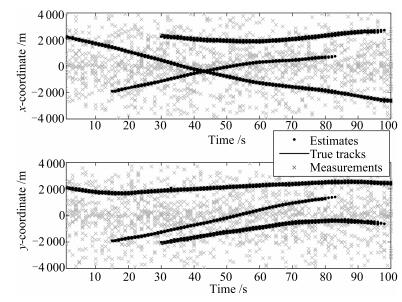
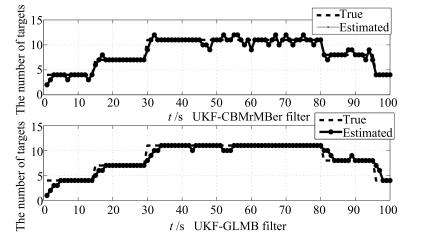
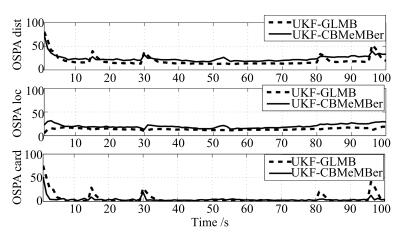
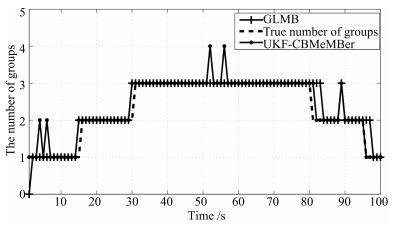
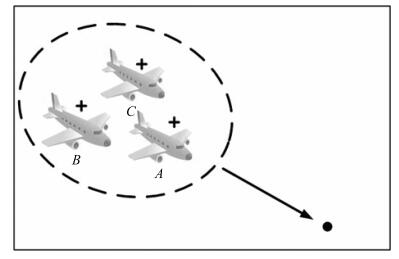
摘要: 针对杂波条件下可分辨群目标的状态估计、目标个数与子群个数估计问题,提出了一种基于标签随机有限集(Label random finite set,L-RFS)框架下的可分辨群目标跟踪算法,该算法主要包括两个方面:可分辨多群目标动态建模和多群目标的跟踪估计.本文工作主要包括:1)结合图论中的邻接矩阵对可分辨群目标运动进行动态建模.2)利用基于L-RFS的广义标签多伯努利滤波(Generalizes label multi-Bernoulli,GLMB)算法对目标的状态和个数进行估计,并且通过估计邻接矩阵得到群的结构和个数估计.3)通过个数不同、结构不同的三个子群目标在二维平面分别做线性和非线性运动进行算法验证.仿真分析表明本文算法能够准确估计出群目标中各目标的状态、个数以及子群的个数,并且能获得目标的航迹估计.
-
关键词:
- 可分辨群目标跟踪 /
- 广义标签多伯努利滤波 /
- 邻接矩阵 /
- 随机有限集 /
- 图论
Abstract: Aiming at the estimation of states, the number of targets and subgroups, a resolvable group target tracking algorithm is proposed based on the framework of label random finite set (L-RFS). The proposed algorithm focus on two aspects:dynamic modeling and tracking estimation for multiple resolvable group targets. Specifically, in the first step, the adjacent matrix is fused in the dynamic models. In the second step, the estimated state sets of the targets and the number of targets are estimated by using the generalized labeled multi-Bernoulli (GLMB) filter in the L-RFS framework. Finally, from the estimated adjacent matrix, the structures and number of subgroups are shown. Two experiments of a linear system and a nonlinear system, which involve three groups of targets with different shapes and structure, are given to show that the given algorithm is effective in estimating the resolvable group targets. -
-
表 1 算法性能分析
Table 1 Performance analysis of algorithms
算法 GLMB算法 CBMeMBer算法 线性 非线性 线性 非线性 时间(秒/步) 1.35 2 0.044 0.52  下载: 导出CSV
下载: 导出CSV
-
[1] Bar-Shalom Y, Tse E. Tracking in a cluttered environment with probabilistic data association. Automatica, 1975, 11(5):451-460 doi: 10.1016/0005-1098(75)90021-7 [2] Bar-Shalom Y. Tracking methods in a multitarget environment. IEEE Transactions on Automatic Control, 1978, 23(4):618-626 doi: 10.1109/TAC.1978.1101790 [3] Fortmann T, Bar-Shalom Y, Scheffe M. Sonar tracking of multiple targets using joint probabilistic data association. IEEE Journal of Oceanic Engineering, 1983, 8(3):173-184 doi: 10.1109/JOE.1983.1145560 [4] Reid D. An algorithm for tracking multiple targets. IEEE Transactions on Automatic Control, 1979, 24(6):843-854 doi: 10.1109/TAC.1979.1102177 [5] Blackman S. Multiple hypothesis tracking for multiple target tracking. IEEE Aerospace and Electronic Systems Magazine, 2004, 19(1):5-18 doi: 10.1109/MAES.2004.1263228 [6] Salmond D J, Gordon N J. Group and extended object tracking. In:Proceedings of the 1999 IEE Colloquium on Target Tracking:Algorithms and Applications. London, UK:IEEE, 1999. 16/1-16/4 http://ieeexplore.ieee.org/document/827262/ [7] 刘伟峰, 柴中, 文成林.基于随机采样的多量测目标跟踪算法.自动化学报, 2013, 39(2):168-178 http://www.aas.net.cn/CN/abstract/abstract17858.shtmlLiu Wei-Feng, Chai Zhong, Wen Cheng-Lin. Multi-measurement target tracking by using random sampling approach. Acta Automatica Sinica, 2013, 39(2):168-178 http://www.aas.net.cn/CN/abstract/abstract17858.shtml [8] Koch J W. Bayesian approach to extended object and cluster tracking using random matrices. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3):1042-1059 doi: 10.1109/TAES.2008.4655362 [9] Koch W, Van Keuk G. Multiple hypothesis track maintenance with possibly unresolved measurements. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(3):883-892 doi: 10.1109/7.599263 [10] Feldmann M, Franken D, Koch W. Tracking of extended objects and group targets using random matrices. IEEE Transactions on Signal Processing, 2011, 59(4):1409-1420 doi: 10.1109/TSP.2010.2101064 [11] 黄剑, 胡卫东.基于贝叶斯框架的空间群目标跟踪技术.雷达学报, 2013, 2(1):86-96 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=ldax201301015&dbname=CJFD&dbcode=CJFQHuang Jian, Hu Wei-Dong. Tracking of group space objects within Bayesian framework. Journal of Radars, 2013, 2(1):86-96 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=ldax201301015&dbname=CJFD&dbcode=CJFQ [12] 李振兴, 刘进忙, 李松, 白东颖, 倪鹏.基于箱式粒子滤波的群目标跟踪算法.自动化学报, 2015, 41(4):785-798 http://www.aas.net.cn/CN/abstract/abstract18653.shtmlLi Zhen-Xing, Liu Jin-Mang, Li Song, Bai Dong-Ying, Ni Peng. Group targets tracking algorithm based on box particle filter. Acta Automatica Sinica, 2015, 41(4):785-798 http://www.aas.net.cn/CN/abstract/abstract18653.shtml [13] Baum M, Hanebeck U D. Random hypersurface models for extended object tracking. In:Proceedings of the 9th IEEE International Symposium on Signal Processing and Information Technology (ISSPIT). Ajman, United Arab Emirates:IEEE, 2009. 178-183 http://ieeexplore.ieee.org/document/5407526/ [14] Gilholm K, Salmond D. Spatial distribution model for tracking extended objects. IEEE Proceedings-Radar, Sonar and Navigation, 2005, 152(5):364-371 doi: 10.1049/ip-rsn:20045114 [15] Gilholm K, Godsill S, Maskell S, Salmond D. Poisson models for extended target and group tracking. In:Proceedings of the 2005 SPIE 5913, Signal and Data Processing of Small Targets. San Diego, USA:SPIE, 2005. 230-241 doi: 10.1117/12.618730 [16] Mahler R. PHD filters for nonstandard targets, Ⅰ:extended targets. In:Proceedings of the 12th International Conference on Information Fusion. Seattle, USA:IEEE, 2009. 915-921 http://ieeexplore.ieee.org/document/5203632 [17] Lundquist C, Granström K, Orguner U. Estimating the shape of targets with a PHD filter. In:Proceedings of the 14th International Conference on Information Fusion (FUSION). Chicago, USA:IEEE, 2011. 49-56 http://ieeexplore.ieee.org/document/5977704/ [18] Granström K, Lundquist C, Orguner U. A Gaussian mixture PHD filter for extended target tracking. In:Proceedings of the 13th International Conference on Information Fusion (FUSION). Edinburgh, UK:IEEE, 2010. 1-8 http://ieeexplore.ieee.org/document/5711885 [19] Orguner U, Lundquist C, Granström K. Extended target tracking with a cardinalized probability hypothesis density filter. In:Proceedings of the 14th International Conference on Information Fusion (FUSION). Chicago, USA:IEEE, 2011. 65-72 http://ieeexplore.ieee.org/document/5977726/ [20] 连峰, 韩崇昭, 刘伟峰, 元向辉.基于SMC-PHDF的部分可分辨的群目标跟踪算法.自动化学报, 2010, 36(5):731-741 http://www.aas.net.cn/CN/abstract/abstract13703.shtmlLian Feng, Han Chong-Zhao, Liu Wei-Feng, Yuan Xiang-Hui. Tracking partly resolvable group targets using SMC-PHDF. Acta Automatica Sinica, 2010, 36(5):731-741 http://www.aas.net.cn/CN/abstract/abstract13703.shtml [21] 连峰, 马冬冬, 元向辉, 陈文, 韩崇昭.扩展目标CBMeMBer滤波器及其高斯混合实现.控制与决策, 2015, 30(4):611-616 http://www.cnki.com.cn/Article/CJFDTotal-KZYC201504006.htmLian Feng, Ma Dong-Dong, Yuan Xiang-Hui, Chen Wen, Han Chong-Zhao. CBMeMBer filter for extended targets and its Gaussian mixture implementations. Control and Decision, 2015, 30(4):611-616 http://www.cnki.com.cn/Article/CJFDTotal-KZYC201504006.htm [22] Gning A, Mihaylova L, Maskell S, Pang S K, Godsill S. Group object structure and state estimation with evolving networks and Monte Carlo methods. IEEE Transactions on Signal Processing, 2011, 59(4):1383-1396 doi: 10.1109/TSP.2010.2103062 [23] Ristic B, Sherrah J. Bernoulli filter for joint detection and tracking of an extended object in clutter. IET Radar, Sonar, and Navigation, 2013, 7(1):26-35 doi: 10.1049/iet-rsn.2012.0069 [24] Vo B T, Vo B N. Labeled random finite sets and multi-object conjugate priors. IEEE Transactions on Signal Processing, 2013, 61(13):3460-3475 doi: 10.1109/TSP.2013.2259822 [25] Vo B N, Vo B T, Phung D. Labeled random finite sets and the Bayes multi-target tracking filter. IEEE Transactions on Signal Processing, 2014, 62(24):6554-6567 doi: 10.1109/TSP.2014.2364014 [26] Beard M, Reuter S, Granstrom K, Vo B T, Vo B N, Scheel A. A generalised labelled multi-Bernoulli filter for extended multi-target tracking. In:Proceedings of the 18th International Conference on Information Fusion (FUSION). Washington, USA:IEEE, 2015. 991-998 http://ieeexplore.ieee.org/document/7266667/ [27] Zhu S J, Liu W F, Weng C L, Cui H L. Multiple group targets tracking using the generalized labeled multi-Bernoulli filter. In:Proceedings of the 35th Chinese Control Conference. Chengdu, China:IEEE, 2016. 4871-4876 http://ieeexplore.ieee.org/document/7554109/ [28] Mahler R P S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4):1152-1178 doi: 10.1109/TAES.2003.1261119 [29] Mahler R P S. Statistical Multisource-Multitarget Information Fusion. Boston, USA:Artech House, 2007. [30] Anderson B D O, Yu C B, Fidan B, Hendrickx J M. Control and information architectures for formations. In:Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control. Munich, Germany:IEEE, 2006. 1127-1138 http://ieeexplore.ieee.org/document/4776802/ [31] Yu C B, Hendrickx J M, Fidan B, Anderson B D O, Blondel V D. Three and higher dimensional autonomous formations:rigidity, persistence and structural persistence. Automatica, 2007, 43(3):387-402 doi: 10.1016/j.automatica.2006.08.025 [32] Diestel R. Graph Theory (3rd edition). New York:Spring-Verlag, 2005. [33] Chung F. Lecture Notes on Spectral Graph Theory. Providence, RI:AMS Publications, 1997. [34] Vo B T, Vo B N, Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Transactions on Signal Processing, 2009, 57(2):409-423 doi: 10.1109/TSP.2008.2007924 [35] Schuhmacher D, Vo B T, Vo B N. A consistent metric for performance evaluation of multi-object filters. IEEE Transactions on Signal Processing, 2008, 56(8):3447-3457 doi: 10.1109/TSP.2008.920469 -






图(17) / 表(1)
计量
- 文章访问数: 2667
- HTML全文浏览量: 394
- PDF下载量: 709
- 被引次数: 0
