

-
摘要: 为了改善交通网络运行状况,根据车流密度的差异对宏观路网进行子区划分,提出了面向多个宏观基本图(Macroscopic fundamental diagram,MFD)子区的边界协调控制方法.根据划分的多个子区间邻接关系和流入流出交通流率,建立了路网车流平衡方程.通过与最佳累积车辆数进行比较,确定了拥挤度高的子区边界交叉口最佳流入与流出的交通流量;进而建立了以整个路网旅行完成流率最大、平均行程时间和平均延误最小的多目标边界协调优化模型,并通过自适应遗传算法对多目标函数进行求解.以存在4个MFD子区的实际路网为分析对象,对比仿真结果表明所提方法可有效提高路网运行效率、缓解拥堵状况.Abstract: In order to improve the service level of urban road network, the macro traffic network is divided into multiple macroscopic fundamental diagram (MFD) sub-regions on the basis of different traffic densities, and then a coordinated perimeter control method is proposed. According to the relations of traffic flows among multiple MFD sub-regions, a balance equation of network traffic flow is established. Compared with the optimal cumulative traffic volume of the network, the optimal traffic inflow and outflow at the crowded intersections of sub-regions perimeter are determined. Moreover, a multi-objective programming model is set up, which takes the maximum average trip completion flow of vehicles, the minimum average travel time and the average delay of road network as the objectives. Adaptive genetic algorithm is used to solve the multi-objective function. An actual road network with 4 MFD sub-regions is tested, and the result shows that the proposed strategies are effective in improving the network efficiency and alleviating traffic congestion.1) 本文责任编委 王占山
-
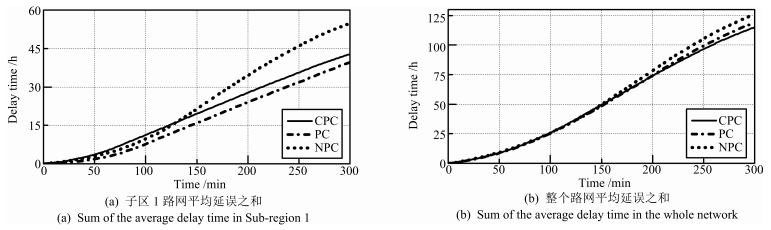
图 8 子区1和整个路网平均延误时间之和
Fig. 8 Sum of the average delay time in Sub-region 1 and the whole network
表 1 子区路网基本参数
Table 1 Discrete modes of the normal traffic behavior
子区编号 路网面积 (km2) 主要路段数 路段主要长度 (m) 交叉口数量 路网交叉口周期时长 (s) 边界控制交叉口数量 边界交叉口周期时长 (s) 对外交通的路段数 整个路网 23.0 36 200 ~ 1 500 157 60 ~ 180 58 120 53 子区1 7.0 20 200 ~ 1 500 51 60 ~ 180 17 120 40 子区2 5.5 12 200 ~ 1 500 37 60 ~ 180 12 120 25 子区3 5.5 12 200 ~ 1 500 36 60 ~ 180 18 120 24 子区4 5.0 12 200 ~ 1 500 33 60 ~ 180 11 120 22  下载: 导出CSV
下载: 导出CSV
表 2 路网子区仿真参数标定
Table 2 Simulation parameters calibration of sub-regions in road network
子区编号 ai bi ci di R2 整个路网 4.5521 × 10−12 −2.7189 × 10−6 4.2024 × 10−3 −2.6534 0.6542 子区1 3.4734 × 10−11 −7.4891 × 10−7 4.3854 × 10−3 −0.0421 0.9456 子区2 3.6318 × 10−11 −7.0694 × 10−7 3.6828 × 10−3 0.6893 0.9000 子区3 1.7598 × 10−10 −2.4750 × 10−6 9.4675 × 10−3 −1.8034 0.9633 子区4 5.8298 × 10−11 −1.1125 × 10−7 5.7969 × 10−3 −0.2909 0.9646
下载: 导出CSV
表 3 子区基本仿真参数与边界控制参数
Table 3 Basic simulation parameters and perimeter control parameters of sub-regions
子区编号 仿真时间 (min) 仿真次数 路网初始累积车辆数 (veh) 路网最佳累积车辆数 (veh) εi(veh) 路网最大累积车辆数 (veh) 路网平均增加交通流量 (veh/min) 平均自由流速度 (km/h) 整个路网 300 150 4 000 12 000 240 38 000 100 ~ 250 50 子区1 300 150 1 000 4 090 82 10 000 50 ~ 100 50 子区2 300 150 1 000 3 660 73 9 000 10 ~ 80 50 子区3 300 150 1 000 2 700 54 7 000 20 ~ 70 50 子区4 300 150 1 000 3 660 73 10 000 20 ~ 807 50
下载: 导出CSV
表 4 子区平均累积车辆数统计表
Table 4 Statistics of the average accumulation in sub-regions
控制方法 子区平均累积车辆数 (veh) 子区1 子区2 子区3 子区4 整个路网 NPC 4 353 2 616 2 061 2 937 11 966 PC 3 345 2 379 2 280 3 126 11 220 CPC 3 597 2 656 2 113 2 986 11 352
下载: 导出CSV
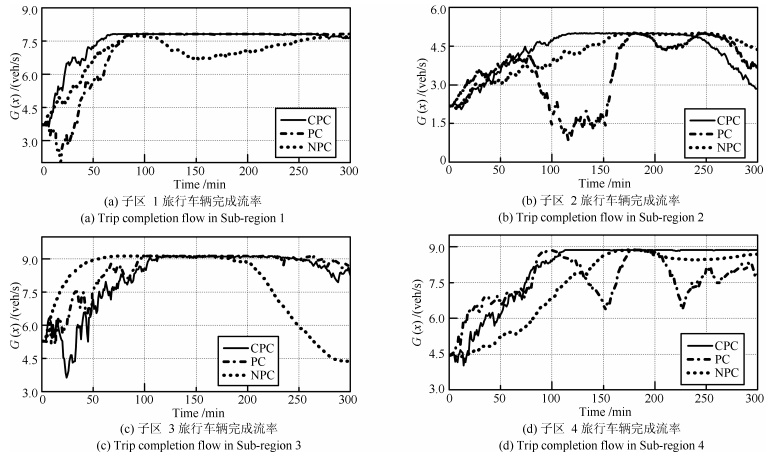
表 5 路网平均旅行车辆完成流率和旅行车辆完成车辆数统计
Table 5 Statistics of the average trip completion flow and the average completion volume in road network
控制方法 路网平均旅行车辆完成流率 (veh/s) 路网平均旅行车辆完成车辆数 (veh) 子区1 子区2 子区3 子区4 整个路网 子区1 子区2 子区3 子区4 整个路网 NPC 6.9001 4.1933 7.8741 7.3487 6.2507 13 837 9 696 12 876 16 310 52 719 PC 7.0079 3.5725 8.4664 7.5583 6.6512 15 003 9 024 13 384 16 493 53 904 CPC 7.4269 4.2599 8.1628 8.0085 6.9646 15 901 10 760 13 348 17 774 57 783
下载: 导出CSV
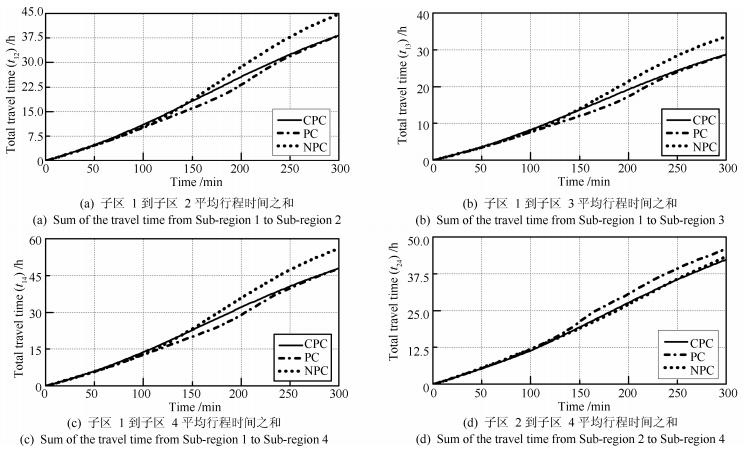
表 6 子区平均行程时间之和与路网平均延误之和统计
Table 6 Statistics of sum of the total travel time in sub-regions and the average delay time of the road network
控制方法 部分子区之间的行程时间之和 (h) 路网平均延误之和 (h) t12 t13 t14 t24 整个路网 子区1 子区2 子区3 子区4 整个路网 NPC 44.80 33.60 56.00 43.24 44.41 54.82 24.63 24.24 22.60 31.57 PC 38.33 28.75 47.92 45.90 40.23 42.75 24.79 26.95 25.88 29.84 CPC 38.32 28.74 47.90 42.30 39.32 42.82 25.00 24.78 22.56 28.79
下载: 导出CSV
-
[1] 赵冬斌, 刘德荣, 易建强.基于自适应动态规划的城市交通信号优化控制方法综述.自动化学报, 2009, 35(6):676-681 http://www.aas.net.cn/CN/abstract/abstract13331.shtmlZhao Dong-Bin, Liu De-Rong, Yi Jian-Qiang. An overview on the adaptive dynamic programming based urban city traffic signal optimal control. Acta Automatica Sinica, 2009, 35(6):676-681 http://www.aas.net.cn/CN/abstract/abstract13331.shtml [2] Yin B, Dridi M, El Moudni A. Traffic network micro-simulation model and control algorithm based on approximate dynamic programming. IET Intelligent Transport Systems, 2016, 10(3):186-196 doi: 10.1049/iet-its.2015.0108 [3] 游子毅, 陈世国, 王义.基于ε支持向量回归理论的区域交通信号智能控制.计算机应用, 2015, 35(5):1361-1366 doi: 10.11772/j.issn.1001-9081.2015.05.1361You Zi-Yi, Chen Shi-Guo, Wang Yi. Intelligent control based on ε-support vector regression theory for regional traffic signal system. Journal of Computer Applications, 2015, 35(5):1361-1366 doi: 10.11772/j.issn.1001-9081.2015.05.1361 [4] 曹洁, 张玲.自适应遗传算法的Multi-agent交通信号优化控制.计算机工程与应用, 2016, 52(13):265-270 doi: 10.3778/j.issn.1002-8331.1408-0073Cao Jie, Zhang Ling. Multi-agent traffic signal control based on adaptive genetic algorithm. Computer Engineering and Applications, 2016, 52(13):265-270 doi: 10.3778/j.issn.1002-8331.1408-0073 [5] Godfrey J W. The mechanism of a road network. Traffic Engineering and Control, 1969, 11(7):323-327 [6] Geroliminis N, Daganzo C F. Existence of urban-scale macroscopic fundamental diagrams:some experimental findings. Transportation Research Part B:Methodological, 2008, 42(9):759-770 doi: 10.1016/j.trb.2008.02.002 [7] Daganzo C F, Lehe L J, Mannering F. Traffic flow on signalized streets. Transportation Research Part B:Methodological, 2016, 90:56-69 doi: 10.1016/j.trb.2016.03.010 [8] 王福建, 孙凌涛, 钱伟.基于改进后冲击波剖面模型的宏观基本图特性研究.公路交通科技, 2016, 33(4):127-133 http://www.cnki.com.cn/Article/CJFDTOTAL-GLJK201604020.htmWang Fu-Jian, Sun Ling-Tao, Qian Wei. Characteristics of macroscopic fundamental diagram based on SPM. Journal of Highway and Transportation Research and Development, 2016, 33(4):127-133 http://www.cnki.com.cn/Article/CJFDTOTAL-GLJK201604020.htm [9] Hajiahmadi M, Haddad J, De Schutter B, Geroliminis N. Optimal hybrid macroscopic traffic control for urban regions:perimeter and switching signal plans controllers. In:Proceedings of the 2013 European Control Conference. Zurich, Switzerland:IEEE, 2013. 3500-3505 [10] Haddad J, Geroliminis N. On the stability of traffic perimeter control in two-region urban cities. Transportation Research Part B:Methodological, 2012, 46(9):1159-1176 doi: 10.1016/j.trb.2012.04.004 [11] Ramezani M, Haddad J, Geroliminis N. Dynamics of heterogeneity in urban networks:aggregated traffic modeling and hierarchical control. Transportation Research Part B:Methodological, 2015, 74:1-19 https://www.researchgate.net/publication/272239377_Dynamics_of_heterogeneity_in_urban_networks_Aggregated_traffic_modeling_and_hierarchical_control [12] 张勇, 白玉, 杨晓光.城市道路交通网络死锁控制策略.中国公路学报, 2010, 23(6):96-102 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201006016.htmZhang Yong, Bai Yu, Yang Xiao-Guang. Strategy of traffic gridlock control for urban road network. China Journal of Highway and Transport, 2010, 23(6):96-102 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201006016.htm [13] Haddad J, Shraiber A. Robust perimeter control design for an urban region. Transportation Research Part B:Methodological, 2014, 68:315-332 doi: 10.1016/j.trb.2014.06.010 [14] Ji Y B, Mo C, Ma W J, Liao D B. Feedback gating control for network based on macroscopic fundamental diagram. Mathematical Problems in Engineering, 2016, 2016:Article ID 3528952 [15] Haddad J, Mirkin B. Adaptive perimeter traffic control of urban road networks based on MFD model with time delays. International Journal of Robust & Nonlinear Control, 2016, 26(6):1267-1285 [16] Haddad J, Ramezani M, Geroliminis N. Cooperative traffic control of a mixed network with two urban regions and a freeway. Transportation Research Part B:Methodological, 2013, 54:17-36 doi: 10.1016/j.trb.2013.03.007 [17] Aboudolas K, Geroliminis N. Perimeter and boundary flow control in multi-reservoir heterogeneous networks. Transportation Research Part B:Methodological, 2013, 55:265-281 doi: 10.1016/j.trb.2013.07.003 [18] Kouvelas A, Saeedmanesh M, Geroliminis N. Feedback perimeter control for heterogeneous urban networks using adaptive optimization. In:Proceedings of the 18th IEEE International Conference on Intelligent Transportation Systems. Las Palmas, Spain:IEEE, 2015. 882-887 [19] 赵靖, 马万经, 汪涛, 廖大彬.基于宏观基本图的相邻子区协调控制方法.交通运输系统工程与信息, 2016, 16(1):78-84 http://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201601013.htmZhao Jing, Ma Wan-Jing, Wang Tao, Liao Da-Bin. Coordinated perimeter flow control for two subareas with macroscopic fundamental diagrams. Journal of Transportation Systems Engineering and Information Technology, 2016, 16(1):78-84 http://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201601013.htm [20] 闫飞, 田福礼, 史忠科.城市交通信号的迭代学习控制及其对路网宏观基本图的影响.控制理论与应用, 2016, 33(5):645-652 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201605011.htmYan Fei, Tian Fu-Li, Shi Zhong-Ke. Iterative learning control for urban traffic signals and the impacts on macroscopic fundamental diagram of road networks. Control Theory & Applications, 2016, 33(5):645-652 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201605011.htm [21] 卢凯, 徐建闽, 郑淑鉴, 王世明.协调控制子区快速动态划分方法研究.自动化学报, 2012, 38(2):279-287 http://www.aas.net.cn/CN/abstract/abstract17683.shtmlLu Kai, Xu Jian-Min, Zheng Shu-Jian, Wang Shi-Ming. Research on fast dynamic division method of coordinated control subarea. Acta Automatica Sinica, 2012, 38(2):279-287 http://www.aas.net.cn/CN/abstract/abstract17683.shtml [22] Walinchus R J. Real-time network decomposition and sub-network interfacing. Highway Research Record, 1971, (366):20-28 [23] 马莹莹, 杨晓光, 曾滢.基于谱方法的城市交通信号控制网络小区划分方法.系统工程理论与实践, 2010, 30(12):2290-2296 doi: 10.12011/1000-6788(2010)12-2290Ma Ying-Ying, Yang Xiao-Guang, Zeng Ying. Urban traffic signal control network partitioning using spectral method. Systems Engineering-Theory and Practice, 2010, 30(12):2290-2296 doi: 10.12011/1000-6788(2010)12-2290 [24] Geroliminis N, Daganzo C F. Macroscopic modeling of traffic in cities. In:Proceedings of the 86th Annual Meeting of Transportation Research Board. Washington DC, USA:TRB, 2007:1-20 [25] Ji Y X, Geroliminis N. On the spatial partitioning of urban transportation networks. Transportation Research Part B:Methodological, 2012, 46(10):1639-1656 doi: 10.1016/j.trb.2012.08.005 [26] Papageorgiou M. Applications of Automatic Control Concepts to Traffic Flow Modeling and Control. Berlin:Springer-Verlag, 1983. [27] Transportation Research Board Business Office. Highway capacity manual 2010. Washington D C:Transportation Research Board of the National Academies, 2010. [28] 王小平, 曹立明.遗传算法:理论、应用与软件实现.西安:西安交通大学出版社, 2002.Wang Xiao-Ping, Cao Li-Ming. Genetic Algorithm:Theory, Application and Software Implementation. Xi'an:Xi'an Jiaotong University Press, 2002. [29] Yang J M, Kao C Y. Integrating adaptive mutations and family competition into genetic algorithms as function optimizer. Soft Computing, 2000, 4(2):89-102 doi: 10.1007/s005000000045 [30] 温广辉, 王明旭, 郭嗣琮.一种求解TSP问题的新型遗传编码方案.科学技术与工程, 2006, 6(2):206-208 http://www.cnki.com.cn/Article/CJFDTOTAL-KXJS200602027.htmWen Guang-Hui, Wang Ming-Xu, Guo Si-Cong. New GA encoding scheme for solving TSP. Science Technology and Engineering, 2006, 6(2):206-208 http://www.cnki.com.cn/Article/CJFDTOTAL-KXJS200602027.htm [31] Xie D F, Wang D Z W, Gao Z Y. Macroscopic analysis of the fundamental diagram with inhomogeneous network and instable traffic. Transportmetrica A:Transport Science, 2016, 12(1):20-42 doi: 10.1080/23249935.2015.1094535 [32] 杨煜普, 欧海涛.基于再励学习与遗传算法的交通信号自组织控制.自动化学报, 2002, 28(4):564-568 http://www.aas.net.cn/CN/abstract/abstract15553.shtmlYang Yu-Pu, Ou Hai-Tao. Self-organized control of traffic signals based on reinforcement learning and genetic algorithm. Acta Automatica Sinica, 2002, 28(4):564-568 http://www.aas.net.cn/CN/abstract/abstract15553.shtml [33] 李瑞敏, 陆化普.基于遗传算法的交通信号控制多目标优化.长安大学学报:自然科学版, 2009, 29(3):85-88 http://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200903018.htmLi Rui-Min, Lu Hua-Pu. Traffic signal control multi-object optimization based on genetic algorithm. Journal of Chang'an University (Natural Science Edition), 2009, 29(3):85-88 http://www.cnki.com.cn/Article/CJFDTOTAL-XAGL200903018.htm [34] 田丰, 边婷婷.基于自适应遗传算法的交通信号配时优化.计算机仿真, 2010, 27(6):305-308 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ201006074.htmTian Feng, Bian Ting-Ting. Traffic signal timing optimization based on adaptive genetic algorithm. Computer Simulation, 2010, 27(6):305-308 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ201006074.htm -

 下载:
下载:




计量
- 文章访问数: 2685
- HTML全文浏览量: 384
- PDF下载量: 739
- 被引次数: 0
