

Event-triggered Cooperative Output Regulation of Heterogeneous Multi-agent Systems with Switching Topology
-
摘要: 研究切换拓扑下线性异构多智能体系统的协同输出调节问题,并设计了一个基于事件触发的输出调节控制机制.设计的控制机制不仅可以实现智能体对外部系统的渐近跟踪和干扰抑制,还可以有效减少智能体之间的信息传递数量,从而降低通信负载减少网络能耗.最后通过仿真验证结论的有效性.Abstract: This paper studies the cooperative output regulation problem for multi-agent systems with switching topology. A novel event-triggered control scheme is designed, which can reduce communication load and save network energy. It is shown that under the proposed control strategy, agents can achieve asymptotic tracking and disturbance rejection. Finally, an example is presented to illustrate the effectiveness of main results.
-
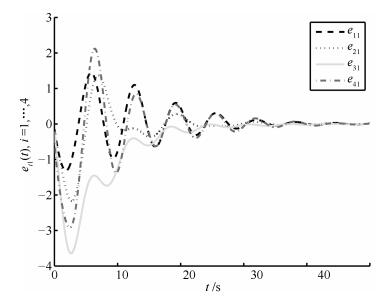
图 1 智能体的调节输出 $e_{i1}(t)$ , $i=1,\cdots,4$
Fig. 1 Regulated outputs $e_{i1}(t)$ , $i=1,\cdots,4$

图 2 智能体的调节输出 $e_{i2}(t)$ , $i=1,\cdots,4$
Fig. 2 Regulated outputs $e_{i2}(t)$ , $i=1,\cdots,4$
-
[1] Huang J. Nonlinear Output Regulation: Theory and Applications. Philadelphia: SIAM, 2004. [2] 王兴平, 宋艳荣, 程兆林.切换网络下时变线性多智能体系统的指数同步.自动化学报, 2015, 41(8): 1528-1532 http://www.aas.net.cn/CN/abstract/abstract18726.shtmlWang Xing-Ping, Song Yan-Rong, Cheng Zhao-Lin. Exponential synchronization of time-varying linear multi-agent systems with switching topology. Acta Automatica Sinica, 2015, 41(8): 1528-1532 http://www.aas.net.cn/CN/abstract/abstract18726.shtml [3] Guo G, Ding L, Han Q L. A distributed event-triggered transmission strategy for sampled-data consensus of multi-agent systems. Automatica, 2014, 50(5): 1489-1496 doi: 10.1016/j.automatica.2014.03.017 [4] Tang Y, Gao H J, Zhang W B, Kurths J. Leader-following consensus of a class of stochastic delayed multi-agent systems with partial mixed impulses. Automatica, 2015, 53: 346-354 doi: 10.1016/j.automatica.2015.01.008 [5] Wang G, Shen Y. Second-order cluster consensus of multi-agent dynamical systems with impulsive effects. Communications in Nonlinear Science and Numerical Simulation, 2014, 19(9): 3220-3228 doi: 10.1016/j.cnsns.2014.02.021 [6] 周峰, 吴炎烜.基于有向网络的一致性跟踪算法.自动化学报, 2015, 41(1): 180-185 http://www.aas.net.cn/CN/abstract/abstract18596.shtmlZhou Feng, Wu Yan-Xuan. Consensus tracking algorithms with directed network. Acta Automatica Sinica, 2015, 41(1): 180-185 http://www.aas.net.cn/CN/abstract/abstract18596.shtml [7] Li H J, Su H Y. Second-order consensus in multi-agent systems with directed topologies and communication constraints. Neurocomputing, 2016, 173: 942-952 doi: 10.1016/j.neucom.2015.08.049 [8] Xia Y Q, Na X T, Sun Z Q, Chen J. Formation control and collision avoidance for multi-agent systems based on position estimation. ISA Transactions, 2016, 61: 287-296 doi: 10.1016/j.isatra.2015.12.010 [9] 罗小元, 杨帆, 李绍宝, 关新平.多智能体系统的最优持久编队生成策略.自动化学报, 2014, 40(7): 1311-1319 http://www.aas.net.cn/CN/abstract/abstract18402.shtmlLuo Xiao-Yuan, Yang Fan, Li Shao-Bao, Guan Xin-Ping. Generation of optimally persistent formation for multi-agent systems. Acta Automatica Sinica, 2014, 40(7): 1311-1319 http://www.aas.net.cn/CN/abstract/abstract18402.shtml [10] Fax J A, Murray R M. Information flow and cooperative control of vehicle formations. IEEE Transactions on Automatic Control, 2004, 49(9): 1465-1476 doi: 10.1109/TAC.2004.834433 [11] Wang X L, Hong Y G, Huang J, Jiang Z P. A distributed control approach to a robust output regulation problem for multi-agent linear systems. IEEE Transactions on Automatic Control, 2010, 55(12): 2891-2895 doi: 10.1109/TAC.2010.2076250 [12] Su Y F, Huang J. Cooperative output regulation of linear multi-agent systems. IEEE Transactions on Automatic Control, 2012, 57(4): 1062-1066 doi: 10.1109/TAC.2011.2169618 [13] Tang Y T, Hong Y G, Wang X H. Distributed output regulation for a class of nonlinear multi-agent systems with unknown-input leaders. Automatica, 2015, 62: 154-160 doi: 10.1016/j.automatica.2015.09.014 [14] 游科友, 谢立华.网络控制系统的最新研究综述.自动化学报, 2013, 39(2): 101-118 doi: 10.1016/S1874-1029(13)60013-0You Ke-You, Xie Li-Hua. Survey of recent progress in networked control systems. Acta Automatica Sinica, 2013, 39(2): 101-118 doi: 10.1016/S1874-1029(13)60013-0 [15] 祝超群, 郭戈.事件驱动的网络化系统最优控制.控制与决策, 2014, 29(5): 802-808 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201405005.htmZhu Chao-Qun, Guo Ge. Optimal control for event-triggered networked control systems. Control and Decision, 2014, 29(5): 802-808 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201405005.htm [16] Wang X L, Ni W, Ma Z B. Distributed event-triggered output regulation of multi-agent systems. International Journal of Control, 2015, 88(3): 640-652 doi: 10.1080/00207179.2014.971432 [17] Hu W F, Liu L. Cooperative output regulation of heterogeneous linear multi-agent systems by event-triggered control. IEEE Transactions on Cybernetics, 2017, 4(1): 105-116 https://www.researchgate.net/publication/290367945_Cooperative_Output_Regulation_of_Heterogeneous_Linear_Multi-Agent_Systems_by_Event-Triggered_Control [18] Wieland P, Sepulchre R, Allgöwer F. An internal model principle is necessary and sufficient for linear output synchronization. Automatica, 2011, 47(5): 1068-1074 doi: 10.1016/j.automatica.2011.01.081 -

 下载:
下载:

图(3)
计量
- 文章访问数: 3680
- HTML全文浏览量: 549
- PDF下载量: 1207
- 被引次数: 0
