

-
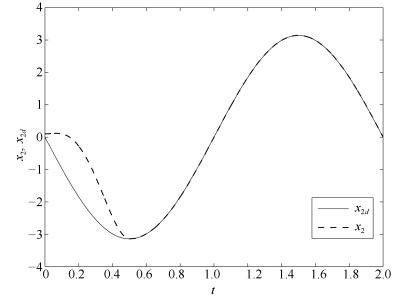
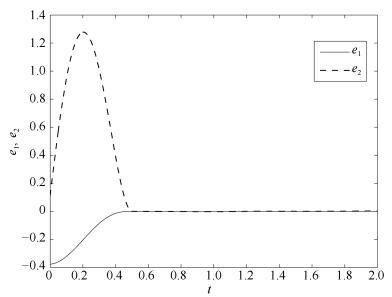
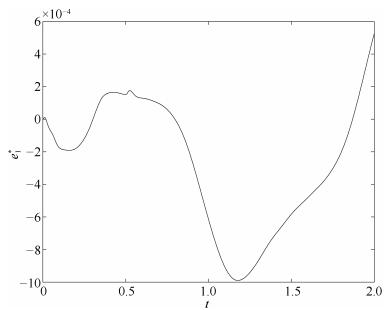
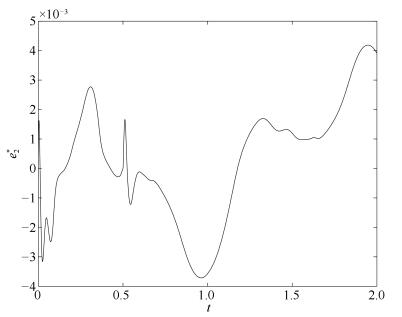
摘要: 针对一类非参数不确定系统,提出状态受限迭代学习控制的参考信号初始修正方法,以解决任意初态下的状态受限轨迹跟踪问题.通过构造修正参考信号,利用一种新型的障碍Lyapunov函数设计迭代学习控制系统,采用鲁棒方法与学习方法相结合的策略处理非参数不确定性,经过足够多次迭代后,可实现系统状态在整个作业区间上对修正参考信号的零误差跟踪,以及在预设作业区间上对参考信号的零误差跟踪.同时,将滤波误差约束于预设的界内,并由此实现对系统状态在各次迭代运行过程中的约束.仿真结果表明了本文所提控制方法的有效性.
-
关键词:
- 迭代学习控制 /
- 初值问题 /
- 非参数不确定性 /
- 障碍Lyapunov函数
Abstract: This paper presents a reference-signal rectifying method of iterative learning control to address the trajectory-tracking problem for a class of state-constrained uncertain systems, in the presence of arbitrary initial states. For design of the iterative learning control scheme, a rectified reference signal is constructed and a new type of barrier Lyapunov function is used. In order to deal with the nonparametric uncertainties, a robust learning approach is applied. It is shown that the closed-loop system's state follows the rectified reference signal perfectly over the entire time interval as iteration increases. In turn, the system state tracks the reference signal on the specified interval. During each iteration, the filtering-error is constrained in the pre-specified region, and the system state is thus constrained. Numerical results are presented to demonstrate the effectiveness of the learning control scheme. -
-
[1] Arimoto S, Kawamura S, Miyazaki F. Bettering operation of robots by learning. Journal of Field Robotics, 1984, 1 (2):123-140 doi: 10.1002/rob.4620010203/pdf [2] Dixon W E, Zergeroglu E, Dawson D M, Costic B T. Repetitive learning control:a Lyapunov-based approach. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2002, 32 (4):538-545 doi: 10.1109/TSMCB.2002.1018772 [3] Xu J X, Tan Y. A composite energy function-based learning control approach for nonlinear systems with time-varying parametric uncertainties. IEEE Transactions on Automatic Control, 2002, 47 (11):1940-1945 doi: 10.1109/TAC.2002.804460 [4] 张玉东, 方勇纯.一类输出饱和系统的学习控制算法研究.自动化学报, 2011, 37 (1):92-98 http://www.aas.net.cn/CN/abstract/abstract17410.shtmlZhang Yu-Dong, Fang Yong-Chun. Learning control for systems with saturated output. Acta Automatica Sinica, 2011, 37 (1):92-98 http://www.aas.net.cn/CN/abstract/abstract17410.shtml [5] 张黎, 刘山.非最小相位系统的基函数型自适应迭代学习控制.自动化学报, 2014, 40 (12):2716-2725 http://www.aas.net.cn/CN/abstract/abstract18551.shtmlZhang Li, Liu Shan. Basis function based adaptive iterative learning control for non-minimum phase systems. Acta Automatica Sinica, 2014, 40 (12):2716-2725 http://www.aas.net.cn/CN/abstract/abstract18551.shtml [6] 卜旭辉, 侯忠生, 余发山, 付子义.基于迭代学习的农业车辆路径跟踪控制.自动化学报, 2014, 40 (2):368-372 http://www.aas.net.cn/CN/abstract/abstract18298.shtmlBu Xu-Hui, Hou Zhong-Sheng, Yu Fa-Shan, Fu Zi-Yi. Iterative learning control for trajectory tracking of farm vehicles. Acta Automatica Sinica, 2014, 40 (2):368-372 http://www.aas.net.cn/CN/abstract/abstract18298.shtml [7] French M, Rogers E. Non-linear iterative learning by an adaptive Lyapunov technique. International Journal of Control, 2000, 73 (10):840-850 doi: 10.1080/002071700405824 [8] Tayebi A, Chien C J. A unified adaptive iterative learning control framework for uncertain nonlinear systems. IEEE Transactions on Automatic Control, 2007, 52 (10):1907-1913 doi: 10.1109/TAC.2007.906215 [9] 陈为胜, 王元亮, 李俊民.周期时变时滞非线性参数化系统的自适应学习控制.自动化学报, 2008, 34 (12):1556-1560 http://www.aas.net.cn/CN/abstract/abstract18038.shtmlChen Wei-Sheng, Wang Yuan-Liang, Li Jun-Min. Adaptive learning control for nonlinearly parameterized systems with periodically time-varying delays. Acta Automatica Sinica, 2008, 34 (12):1556-1560 http://www.aas.net.cn/CN/abstract/abstract18038.shtml [10] Yin C K, Xu J X, Hou Z S. A high-order internal model based iterative learning control scheme for nonlinear systems with time-iteration-varying parameters. IEEE Transactions on Automatic Control, 2010, 55 (11):2665-2670 doi: 10.1109/TAC.2010.2069372 [11] Ham C, Qu Z. A new learning control based on the Lyapunov direct method. In:Proceedings of Southcon/94 Conference Record. Orlando, USA:IEEE, 1994. 121-125 [12] Xu J X, Yan R. On repetitive learning control for periodic tracking tasks. IEEE Transactions on Automatic Control, 2006, 51 (11):1842-1848 doi: 10.1109/TAC.2006.883034 [13] Marino R, Tomei P, Verrelli C M. Robust adaptive learning control for nonlinear systems with extended matching unstructured uncertainties. International Journal of Robust and Nonlinear Control, 2012, 22 (6):645-675 doi: 10.1002/rnc.v22.6 [14] 陈彭年, 秦化淑, 方学毅.控制增益时变的非线性系统的迭代学习控制.系统科学与数学, 2012, 32 (6):693-704 http://www.cnki.com.cn/Article/CJFDTOTAL-STYS201206006.htmChen Peng-Nian, Qin Hua-Shu, Fang Xue-Yi. Iterative learning control for uncertain nonlinear systems with time-varying control gain. Journal of Systems Science and Mathematical Sciences, 2012, 32 (6):693-704 http://www.cnki.com.cn/Article/CJFDTOTAL-STYS201206006.htm [15] Liuzzo S, Marino R, Tomei P. Adaptive learning control of nonlinear systems by output error feedback. IEEE Transactions on Automatic Control, 2007, 52 (7):1232-1248 doi: 10.1109/TAC.2007.900827 [16] Chien C J, Hsu C T, Yao C Y. Fuzzy system-based adaptive iterative learning control for nonlinear plants with initial state errors. IEEE Transactions on Fuzzy Systems, 2004, 12 (5):724-732 doi: 10.1109/TFUZZ.2004.834806 [17] Sun M X, Yan Q Z. Error tracking of iterative learning control systems. Acta Automatica Sinica, 2013, 39 (3):251-262 doi: 10.1016/S1874-1029(13)60027-0 [18] 孙明轩, 黄宝健.迭代学习控制.北京:国防工业出版社, 1999. 182-184Sun Ming-Xuan, Huang Bao-Jian. Iterative Learning Control. Beijing:National Defence Industry Press, 1999. 182-184 [19] 严求真, 孙明轩, 李鹤.任意初值非线性不确定系统的迭代学习控制.自动化学报, 2016, 42 (4):545-555 http://www.aas.net.cn/CN/abstract/abstract18842.shtmlYan Qiu-Zhen, Sun Ming-Xuan, Li He. Iterative learning control for nonlinear uncertain systems with arbitrary initial state. Acta Automatica Sinica, 2016, 42 (4):545-555 http://www.aas.net.cn/CN/abstract/abstract18842.shtml [20] Li X D, Chow T W S, Cheng L L. Adaptive iterative learning control of non-linear MIMO continuous systems with iteration-varying initial error and reference trajectory. International Journal of Systems Science, 2013, 44 (4):786-794 doi: 10.1080/00207721.2011.625480 [21] 李向阳.一类非线性时变系统的迭代学习控制.控制理论与应用, 2014, 31 (8):1087-1093 http://cdmd.cnki.com.cn/Article/CDMD-10337-1012513737.htmLi Xiang-Yang. Iterative learning control for a class of nonlinear time-varying system. Control Theory & Applications, 2014, 31 (8):1087-1093 http://cdmd.cnki.com.cn/Article/CDMD-10337-1012513737.htm [22] 李向阳.基于有限时间跟踪微分器的迭代学习控制.自动化学报, 2014, 40 (7):1366-1375 http://www.aas.net.cn/CN/abstract/abstract18408.shtmlLi Xiang-Yang. Iterative learning control based on finite time tracking differentiator. Acta Automatica Sinica, 2014, 40 (7):1366-1375 http://www.aas.net.cn/CN/abstract/abstract18408.shtml [23] Jin X, Xu J X. Iterative learning control for output-constrained systems with both parametric and nonparametric uncertainties. Automatica, 2013, 49 (8):2508-2516 doi: 10.1016/j.automatica.2013.04.039 [24] Xu J X, Jin X. State-constrained iterative learning control for a class of MIMO systems. IEEE Transactions on Automatic Control, 2013, 58 (5):1322-1327 doi: 10.1109/TAC.2012.2223353 [25] 孙明轩, 张伟博, 严求真.非参数不确定系统约束迭代学习控制.控制理论与应用, 2014, 31 (4):479-484 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201404010.htmSun Ming-Xuan, Zhang Wei-Bo, Yan Qiu-Zhen. Constrained iterative learning control of a class of non-parametric uncertain systems. Control Theory & Applications, 2014, 31 (4):479-484 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201404010.htm [26] 严求真, 孙明轩.非参数不确定系统状态受限误差跟踪学习控制方法.控制理论与应用, 2015, 32 (7):895-901 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201507006.htmYan Qiu-Zhen, Sun Ming-Xuan. Error-tracking iterative learning control with state constrained for nonparametric uncertain systems. Control Theory & Applications, 2015, 32 (7):895-901 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201507006.htm [27] 余琼霞, 侯忠生.非参数不确定系统的自适应迭代学习控制.系统科学与数学, 2016, 36 (1):1-13 http://www.cnki.com.cn/Article/CJFDTOTAL-STYS201601001.htmYu Qiong-Xia, Hou Zhong-Sheng. Adaptive iterative learning control for a class of non-parametric uncertain systems. Journal of Systems Science and Mathematical Sciences, 2016, 36 (1):1-13 http://www.cnki.com.cn/Article/CJFDTOTAL-STYS201601001.htm [28] 庄开宇, 张克勤, 苏宏业, 褚健.高阶非线性系统的Terminal滑模控制.浙江大学学报(工学版), 2002, 36 (5):482-485, 539 http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201211008.htmZhuang Kai-Yu, Zhang Ke-Qin, Su Hong-Ye, Chu Jian. Terminal sliding mode control for high-order nonlinear dynamic systems. Journal of Zhejiang University (Engineering Science), 2002, 36 (5):482-485, 539 http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201211008.htm [29] 谢华英, 孙明轩, 金奎. 有限时间收敛迭代学习控制器设计. 见: 第29届中国控制会议论文集. 北京: 中国自动化学会, 2010. 5845-5850 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-KZLL2010070010FB.htmXie Hua-Ying, Sun Ming-Xuan, Jin Kui. Iterative learning controller designs with finite-time convergence performance. In:Proceedings of the 29th Chinese Control Conference. Beijing, China:TCCT, 2010. 5845-5850 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-KZLL2010070010FB.htm -

 下载:
下载:

图(8)
计量
- 文章访问数: 2323
- HTML全文浏览量: 316
- PDF下载量: 738
- 被引次数: 0
