

-
摘要: 对于基于图像的城市场景重建,由于光照变化、透视畸变、弱纹理区域等因素的影响,传统像素级与区域级的重建算法通常难以获得可靠的重建结果.为了解决此问题,本文提出一种快速、鲁棒的分段平面重建算法.根据城市场景结构特征与分段平面假设,本文算法首先利用基于连通域检测的空间平面拟合方法从初始空间点中抽取充分且可靠的候选空间平面,然后在MRF(Markov random field)能量最小化框架下将场景的完整结构推断问题转化为平面标记问题进行求解.由于候选平面集与融合灰度一致性度量、空间几何与可见性约束的能量模型的高可靠性,场景的完整结构因此可被有效地重建.实验结果表明,本文算法能较好地克服传统算法可靠性差、重建场景不完整等缺点,同时具有较高的计算效率.Abstract: For image-based urban scene reconstruction, traditional pixel-level or region-level methods often fail to achieve satisfactory results because of various negative factors such as illumination variations, perspective distortion, poorly textured regions, etc. To address this problem, a rapid and robust piecewise planar stereo method is proposed in this paper. Under the scene piecewise planar assumption and by taking into account the structural characteristics of urban scenes, the proposed method at first extracts sufficient and reliable candidate planes from initial spatial points based on the connected-region detection; then the problem of scene reconstruction is converted into a plane labeling problem under the Markov random field (MRF) framework. By virtue of the high reliability of our extracted candidate planes and the energy model properly designed by incorporating geometric constraints, spatial visibility and photo-consistency measures, a complete scene structure is effectively reconstructed. Experiment results show that the proposed method can satisfactorily handle the low-reliability and incomplete-reconstruction problems in traditional methods with computational efficiency.
-
Key words:
- Energy minimization /
- plane fitting /
- 3D reconstruction /
- depth map
1) 本文责任编委 贾云得 -

图 6 数据集例图 (上:标准数据; 下:真实数据)
Fig. 6 Sample images (Up: standard data; Down: real-world data)

图 8 真实数据集实验结果 (图像从上而下为: #1, #2, #3和#4)
Fig. 8 Results for real-world data sets (Images from top to bottom are #1, #2, #3 and #4.)
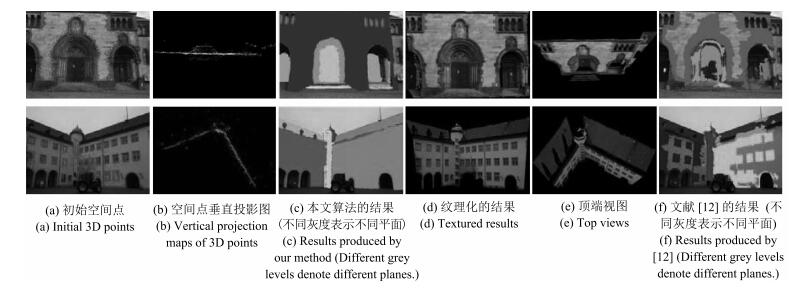
图 9 多幅图像对应的初始空间点与本文算法重建结果(左:场景#1;右:场景#2)
Fig. 9 Initial 3D points and reconstruction results of multiple images (Left: scene #1; Right: scene #2)
表 1 在标准数据集上的算法性能比较
Table 1 Performance comparisons on standard data sets
图像 初始空间点数量 本文算法 文献[12] 超像素数量 平面数量 重建精度 时间 (s) 超像素数量 平面数量 重建精度 时间 (s) 抽取 推断 合计 抽取 推断 合计 Herz-Jesu 29 541 49 326 12 0.8043 73.15 138.81 211.96 3 096 7 0.3296 136.72 124.50 258.22 Castle 12 337 26 825 9 0.7452 57.96 218.06 276.01 4 127 5 0.2701 107.40 196.80 304.21  下载: 导出CSV
下载: 导出CSV
表 2 在真实数据集上的算法性能比较
Table 2 Performance comparisons on real-world data sets
图像序号 初始空间点 本文算法 文献[12] 超像素 平面 精度 时间 (s) 超像素 平面 精度 时间 (s) #1 16 520 13 907 6 0.7554 58.22 1 996 4 0.3187 78.13 #2 20 468 9 562 7 0.7852 49.36 1 768 6 0.4165 60.98 #3 13 710 23 955 6 0.6486 70.01 2 341 6 0.3547 76.39 #4 10 694 18 933 7 0.5713 64.52 3 011 5 0.2310 72.67
下载: 导出CSV
-
[1] Hong L, Chen G. Segment-based stereo matching using graph cuts. In:Proceeding of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Washington, DC, USA:IEEE, 2004. I-74-I-81 [2] Wang Z F, Zheng Z G. A region based stereo matching algorithm using cooperative optimization. In:Proceeding of the 2008 IEEE Conference on Computer Vision and Pattern Recognition. Anchorage, USA:IEEE, 2008. 1-8 [3] Gorelick L, Boykov Y, Veksler O, Ayed I B, Delong A. Submodularization for binary pairwise energies. In:Proceeding of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus, USA:IEEE, 2014. 1154-1161 [4] Çiğla C, Zabulis X, Aydin A A. Segment-based stereo-matching via plane and angle sweeping. In:Proceedings of the 2007 3DTV Conference. Kos Island, Greece:IEEE, 2007. 1-4 [5] Furukawa Y, Curless B, Seitz S M, Szeliski R. Manhattan-world stereo. In:Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition. Miami, USA:IEEE, 2009. 1422-1429 [6] Furukawa Y, Ponce J. Accurate, dense, and robust multiview stereopsis. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(8):1362-1376 doi: 10.1109/TPAMI.2009.161 [7] Gallup D, Frahm J M, Mordohai P, Yang Q X, Pollefeys M. Real-time plane-sweeping stereo with multiple sweeping directions. In:Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition. Minneapolis, USA:IEEE, 2007. 1-8 [8] Mičušík B, Košecká J. Multi-view superpixel stereo in urban environments. International Journal of Computer Vision, 2010, 89(1):106-119 doi: 10.1007/s11263-010-0327-9 [9] Sinha S N, Steedly D, Szeliski R. Piecewise planar stereo for image-based rendering. In:Proceedings of the 12th IEEE International Conference on Computer Vision. Kyoto, Japan:IEEE, 2009. 1881-1888 [10] Chauve A L, Labatut P, Pons J P. Robust piecewise-planar 3D reconstruction and completion from large-scale unstructured point data. In:Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition. San Francisco, USA:IEEE, 2010. 1261-1268 [11] Kowdle A, Sinha S N, Szeliski R. Multiple view object cosegmentation using appearance and stereo cues. In:Proceedings of the 12th European Conference on Computer Vision. Florence, Italy:Springer-Verlag, 2012. 789-803 [12] Bódis-Szomorú A, Riemenschneider H, van Gool L. Fast, approximate piecewise-planar modeling based on sparse structure-from-motion and superpixels. In:Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus, USA:IEEE, 2014. 469-476 [13] Comaniciu D, Meer P. Mean shift:a robust approach toward feature space analysis. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(5):603-619 doi: 10.1109/34.1000236 [14] Kumar M P, Turki H, Preston D, Koller D. Parameter estimation and energy minimization for region-based semantic segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(7):1373-1386 doi: 10.1109/TPAMI.2014.2372766 [15] Toldo R, Fusiello A. Robust multiple structures estimation with J-linkage. In:Proceedings of the 10th European Conference on Computer Vision. Marseille, France:Springer, 2008. 537-547 [16] Isack H, Boykov Y. Energy-based geometric multi-model fitting. International Journal of Computer Vision, 2012, 97(2):123-147 doi: 10.1007/s11263-011-0474-7 [17] Strecha C, von Hansen W, van Gool L, Fua P, Thoennessen U. On benchmarking camera calibration and multi-view stereo for high resolution imagery. In:Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition. Anchorage, USA:IEEE, 2008. 1-8 [18] Shen S H. Accurate multiple view 3D reconstruction using patch-based stereo for large-scale scenes. IEEE Transactions on Image Processing, 2013, 22(5):1901-1914 doi: 10.1109/TIP.2013.2237921 [19] 王伟, 高伟, 胡占义.基于语义约束与Graph Cuts的稠密三维场景重建.中国科学:信息科学, 2014, 44(6):774-792 http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201406009.htmWang Wei, Gao Wei, Hu Zhan-Yi. Dense 3D scene reconstruction based on semantic constraint and graph cuts. Science China Information Sciences, 2014, 44(6):774-792 http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201406009.htm -

 下载:
下载:



计量
- 文章访问数: 2855
- HTML全文浏览量: 423
- PDF下载量: 688
- 被引次数: 0
