

Cluster Analysis of Plantar Pressure Characteristics after Anterior Cruciate Ligament Deficiency
-
摘要: 运动过程中,人体的步态特征可以在足底压力图像上有准确的记录,而这也就可以成为判断步态正常与否的一条有效依据.通过一组压力传感器阵列获取人体运动过程的足底压力分布数据,提取步态的运动学和动力学特性.在此基础上,采用极限学习机(Extreme learning machines,ELM)神经网络聚类算法对足底压力数据进行分析,完成正常与异常步态的分类辨识工作.本文从实际临床数据出发,对前交叉韧带断裂患者进行步态分析,并据医生的临床诊断结果进行校验.该方法在步态分析上取得了较为良好的效果,仿真结果表明了其有效性.Abstract: The gait characteristics of an actor can be recorded accurately on the plantar pressure map in a movement. It can be used to distinguish whether the gait of this actor in a movement is abnormal or not. Using a set of pressure sensors, the plantar pressure during dynamic motion is collected, and the kinetic and dynamic characteristics of gait are extracted. Then extreme learning machines (ELM) neural network cluster algorithm is used to the analyze of the plantar pressure data and identification of normal or abnormal gait is done. Based on actual clinical data, this method carries out an analysis of patients with anterior cruciate ligament deficiency, which is checked according to the doctor's clinical diagnosis results. Result shows that this method is effective.
-
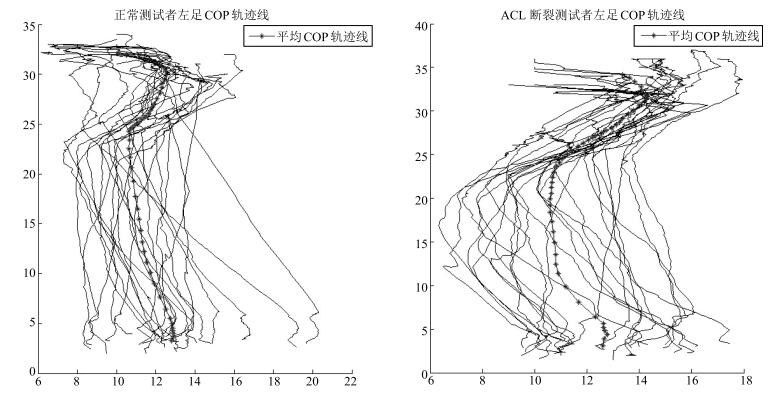
图 5 正常测试者与ACL断裂测试者的左侧足底压力COP轨迹线
Fig. 5 Left feet's COP lines of normal and ACLD participators
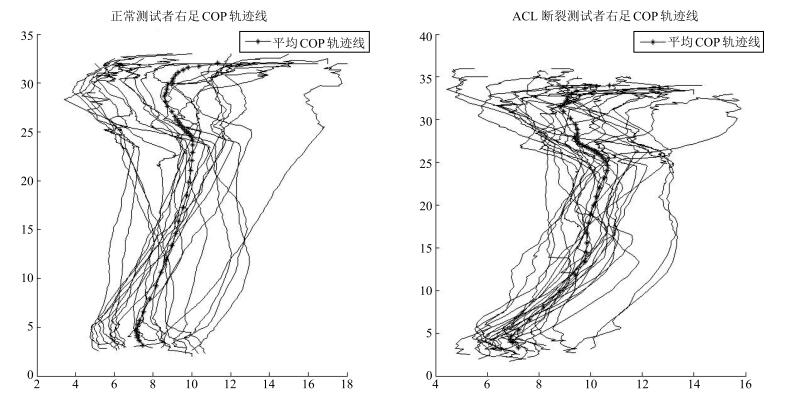
图 6 正常测试者与ACL断裂测试者的右侧足底压力COP轨迹线
Fig. 6 Right feet's COP lines of normal and ACLD participators
表 1 正常测试者左侧足底压力数据特征序列表
Table 1 COP feature vectors of left feet in the normal group
序号 组别 $C_1x$ $C_1y$ $C_2x$ $C_2y$ $C_3x$ $C_3y$ $C_4x$ $C_4y$ $C_5x$ $C_5y$ 1 $A$ 2 12 5 12 24 14 26 15 26 14 2 3 11 4 12 17 12 23 12 27 14 3 2 13 3 13 10 13 23 12 27 14 4 3 13 5 13 15 11 23 12 28 13 5 3 13 5 13 14 11 22 11 28 11 6 $B$ 3 12 5 13 13 11 22 11 27 11 7 3 13 4 13 13 10 22 10 28 13 8 3 13 6 13 15 8 21 7 27 7 9 3 13 5 13 14 11 22 11 28 11 10 3 12 5 13 13 11 22 11 27 11 11 $C$ 3 12 5 13 10 11 21 9 28 12 12 3 10 5 9 12 9 21 10 27 15 13 2 13 9 10 13 10 11 10 26 13 14 2 9 4 9 8 9 21 9 27 15 15 3 9 5 10 6 10 23 13 28 14 16 $D$ 3 8 4 9 8 9 22 12 27 15 17 3 8 5 9 13 8 22 10 28 16 18 3 12 8 11 16 9 21 10 27 13 19 2 13 7 12 13 10 22 10 27 13 20 3 13 8 11 19 8 21 9 27 13 21 $E$ 3 12 10 10 17 9 21 9 27 12 22 3 14 5 14 13 12 6 14 27 9 23 2 15 5 15 7 15 23 10 27 8 24 3 15 8 13 14 9 10 11 28 7 25 3 14 5 15 16 10 22 9 26 10  下载: 导出CSV
下载: 导出CSV
表 2 左膝ACL断裂测试者左侧足底压力数据特征序列表
Table 2 COP feature vectors of left feet in the group of left side ACLD
序号 组别 $C_1x$ $C_1y$ $C_2x$ $C_2y$ $C_3x$ $C_3y$ $C_4x$ $C_4y$ $C_5x$ $C_5y$ 1 $A$ 2 12 4 12 11 12 20 11 27 14 2 2 11 9 9 15 9 21 9 27 15 3 2 10 6 9 11 9 21 10 28 15 4 3 10 11 7 15 9 21 9 28 15 5 3 11 6 11 14 9 20 9 27 13 6 $B$ 3 10 11 7 15 9 21 9 28 15 7 3 10 11 6 13 7 20 8 27 15 8 2 10 7 10 12 9 20 8 27 14 9 4 12 5 13 13 11 20 11 27 13 10 2 11 5 12 13 12 21 12 27 14 11 $C$ 3 13 4 14 10 14 23 12 28 13 12 3 11 5 11 12 12 22 13 28 14 13 2 12 4 13 10 12 21 12 27 15 14 2 13 5 13 12 12 22 12 28 14 15 2 13 7 11 11 10 21 10 26 11 16 $D$ 2 13 8 10 12 9 20 7 23 9 17 3 13 6 11 14 9 23 9 24 9 18 3 14 8 12 14 10 21 9 24 9 19 1 13 6 12 15 7 21 8 24 10 20 2 9 5 9 15 10 22 12 27 13 21 $E$ 3 9 14 6 19 7 21 10 27 12 22 2 10 8 7 14 8 21 11 27 13 23 2 9 8 7 18 8 21 10 27 13 24 3 11 6 11 14 8 20 9 27 13 25 3 10 5 10 15 7 21 10 28 14
下载: 导出CSV
表 3 左侧足底压力数据聚类分析辨识结果
Table 3 The result of left plantar pressure analysis
序号 训练组别 训练数据个数 测试组别 测试数据个数 辨识准确率 (%) 1 $A, B, C, D$ 40 $E$ 10 90 2 $A, B, C, E$ 40 $D$ 10 50 3 $A, B, D, E$ 40 $C$ 10 60 4 $ A, C, D, E$ 40 $B$ 10 100 5 $B, C, D, E$ 40 $A$ 10 80
下载: 导出CSV
表 4 正常测试者右侧足底压力数据特征序列表
Table 4 COP feature vectors of right feet in the normal group
序号 组别 $C_1x$ $C_1y$ $C_2x$ $C_2y$ $C_3x$ $C_3y$ $C_4x$ $C_4y$ $C_5x$ $C_5y$ 1 $A$ 3 8 5 7 14 8 7 7 27 6 2 3 10 4 8 10 8 22 5 27 5 3 2 8 4 8 12 8 21 9 27 7 4 2 5 4 4 11 7 22 9 28 9 5 2 4 4 4 13 8 22 10 27 9 6 $B$ 3 5 5 4 5 4 22 10 28 10 7 3 4 4 4 16 9 23 9 28 9 8 3 5 4 5 13 8 22 9 28 8 9 2 4 4 4 13 8 22 10 27 9 10 3 5 5 4 5 4 22 10 28 10 11 $C$ 3 5 4 4 12 7 22 9 28 10 12 4 7 5 7 12 8 21 8 23 9 13 2 7 6 6 16 7 22 6 26 3 14 3 9 4 9 14 8 21 6 27 4 15 2 5 5 5 13 6 21 7 27 4 16 $D$ 3 6 4 6 12 7 21 8 27 5 17 3 7 8 8 16 8 21 9 27 6 18 2 8 7 10 12 10 22 10 28 7 19 2 7 4 8 15 9 9 9 27 6 20 3 7 9 8 15 8 22 7 28 4 21 $E$ 3 9 9 12 16 12 22 9 27 5 22 3 4 5 4 14 6 5 4 27 9 23 3 7 5 7 13 10 23 13 27 14 24 2 5 5 5 10 6 6 5 27 8 25 3 6 4 6 7 6 4 6 27 8
下载: 导出CSV
表 5 右膝ACL断裂测试者右侧足底压力数据特征序列表
Table 5 COP feature vectors of right feet in the group of right side ACLD
序号 组别 $C_1x$ $C_1y$ $C_2x$ $C_2y$ $C_3x$ $C_3y$ $C_4x$ $C_4y$ $C_5x$ $C_5y$ 1 $A$ 2 4 8 8 17 10 21 10 27 8 2 3 7 4 7 15 9 20 9 27 7 3 2 6 5 6 17 10 21 9 27 8 4 3 6 7 8 18 9 22 9 27 8 5 2 6 7 8 17 10 21 10 27 8 6 $B$ 2 6 7 7 13 7 23 8 27 8 7 3 4 5 4 14 7 22 9 27 11 8 2 4 7 6 12 6 23 8 27 9 9 3 5 8 7 14 8 23 8 27 9 10 2 6 5 6 15 7 22 8 27 8 11 $C$ 2 4 5 5 12 6 21 9 27 8 12 3 5 5 6 12 8 22 10 27 10 13 2 7 6 7 16 9 14 10 27 6 14 2 8 11 11 16 10 21 9 27 6 15 3 7 5 8 16 9 21 9 27 5 16 $D$ 2 6 6 7 13 9 21 9 27 4 17 2 6 7 8 16 9 21 8 27 4 18 3 7 6 8 17 10 22 9 28 6 19 2 6 4 6 13 8 22 9 28 8 20 2 7 4 7 10 7 21 9 27 7 21 $E$ 3 9 6 9 12 10 21 10 27 6 22 3 7 6 7 15 9 22 8 27 7 23 3 6 6 6 17 8 23 7 28 6 24 3 6 5 6 16 9 21 10 27 5 25 3 7 8 8 15 10 22 11 28 8
下载: 导出CSV
表 6 右侧足底压力数据聚类分析辨识结果
Table 6 The result of right plantar pressure analysis
序号 训练组别 训练数据个数 测试组别 测试数据个数 辨识准确率 (%) 1 $ A, B, C, D$ 40 $E$ 10 80 2 $A, B, C, E$ 40 $D$ 10 70 3 $ A, B, D, E$ 40 $C$ 10 80 4 $ A, C, D, E$ 40 $B$ 10 70 5 $ B, C, D, E$ 40 $A$ 10 80
下载: 导出CSV
-
[1] Taylor A J, Menz H B, Keenan A M. The influence of walking speed on plantar pressure measurements using the two-step gait initiation protocol. The Foot, 2004, 14 (1): 49-55 [2] Stolwijk N M, Duysens J, Louwerens J W K, Keijsers N L. Plantar pressure changes after long-distance walking. Medicine and Science in Sports and Exercise, 2010, 42 (12): 2264-2272 [3] Lai Y C, Lin H S, Pan H F, Chang W N, Hsu C J, Renn J H. Impact of foot progression angle on the distribution of plantar pressure in normal children. Clinical Biomechanics, 2014, 29 (2): 196-200 doi: 10.1016/j.clinbiomech.2013.11.012 [4] Keijsers N L W, Stolwijk N M, Nienhuis B, Duysens J. A new method to normalize plantar pressure measurements for foot size and foot progression angle. Journal of Biomechanics, 2009, 42 (1): 87-90 http://www.academia.edu/14125878/A_new_method_to_normalize_plantar_pressure_measurements_for_foot_size_and_foot_progression_angle [5] Kohonen T. The self-organizing map. Proceedings of the IEEE, 1990, 78 (9): 1464-1480 [6] Kohonen T. Self-Organizing Maps. New York: Springer-Verlag, 2001. [7] Carpenter G A, Grossberg S, Rosen D B. Fuzzy ART: fast stable learning and categorization of analog patterns by an adaptive resonance system. Neural Networks 1991, 4 (06): 759-771 doi: 10.1016/0893-6080(91)90056-B [8] Huang G B, Wang D H, Lan Y. Extreme learning machines: a survey. International Journal of Machine Learning and Cybernetics, 2011, 2 (2): 107-122 doi: 10.1007/s13042-011-0019-y [9] Stolwijk N M, Duysens J, Louwerens J W, van de Ven Y H, Keijsers N L. Flat feet, happy feet? Comparison of the dynamic plantar pressure distribution and static medial foot geometry between Malawian and Dutch adults. PLoS One, 2013, 8 (2): e57209 doi: 10.1371/journal.pone.0057209 [10] Cavanagh P R, Rodgers M M. The arch index: a useful measure from footprints. Journal of Biomechanics, 1987, 20 (5): 547-551 doi: 10.1016/0021-9290(87)90255-7 [11] Andriacchi T P, Dyrby C O. Interactions between kinematics and loading during walking for the normal and ACL deficient knee. Journal of Biomechanics, 2005, 38 (2): 293-298 doi: 10.1016/j.jbiomech.2004.02.010 [12] 黄红拾, 于媛媛, 郭秦炜, 徐雁, 敖英芳.前交叉韧带断裂患者步行时足底压力时间特征.中国运动医学杂志, 2015, 34 (3): 271-274 http://www.cnki.com.cn/Article/CJFDTOTAL-YDYX201503009.htmHuang Hong-Shi, Yu Yuan-Yuan, Guo Qin-Wei, Xu Yan, Ao Ying-Fang. Temporal characteristics of plantar pressure in patients with anterior cruciate ligament rupture during walking. Chinese Journal of Sports Medicine, 2015, 34 (3): 271-274 http://www.cnki.com.cn/Article/CJFDTOTAL-YDYX201503009.htm [13] Huang G B, Chen Y Q, Babri H A. Classification ability of single hidden layer feedforward neural networks. IEEE Transactions on Neural Networks, 2000, 11 (3): 799-801 doi: 10.1109/72.846750 [14] Feng G R, Huang G B, Lin Q P, Gay R. Error minimized extreme learning machine with growth of hidden nodes and incremental learning. IEEE Transactions on Neural Networks, 2009, 20 (8): 1352-1357 https://www.researchgate.net/publication/26665344_Error_Minimized_Extreme_Learning_Machine_With_Growth_of_Hidden_Nodes_and_Incremental_Learning [15] Huang G B, Zhou H M, Ding X J, Zhang R. Extreme learning machine for regression and multiclass classification. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2012, 42 (2): 513-529 http://www.doc88.com/p-9197171944428.html [16] DeFrate L E, Papannagari R, Gill T J, Moses J M, Pathare N P, Li G A. The 6 degrees of freedom kinematics of the knee after anterior cruciate ligament deficiency: an in vivo imaging analysis. American Journal of Sports Medicine, 2006, 34 (8): 1240-1246 https://www.researchgate.net/publication/7145174_The_6_Degrees_of_Freedom_Kinematics_of_the_Knee_After_Anterior_Cruciate_Ligament_Deficiency_An_In_Vivo_Imaging_Analysis [17] Ikeda H, Kurosawa H, Kim S G. Quadriceps torque curve pattern in patients with anterior cruciate ligament injury. International Orthopaedics, 2002, 26 (6): 374-376 doi: 10.1007/s00264-002-0402-0 [18] Chiu M C, Wu H C, Chang L Y, Wu M H. Center of pressure progression characteristics under the plantar region for elderly adults. Gait and Posture, 2013, 37 (3): 408-412 doi: 10.1016/j.gaitpost.2012.08.010 -

 下载:
下载:




计量
- 文章访问数: 2682
- HTML全文浏览量: 272
- PDF下载量: 716
- 被引次数: 0
