

-
摘要: 由眨眼和眼动产生的眼电伪迹(Electrooculography,EOG)信号是脑电信号(Electroencephalography,EEG)中的主要噪声信号之一.目前,多通道脑电信号中眼电伪迹的去除算法已经较为成熟.而在单通道脑电信号的眼电伪迹去除中,由于采集通道数量较少且缺乏参考眼电信号,目前尚无十分有效的去除方法.本文提出一种基于小波变换(Wavelet transform,WT)、集合经验模态分解(Ensemble empirical mode decomposition,EEMD)和独立成分分析(Independent component analysis,ICA)的WT-EEMD-ICA单通道脑电信号眼电伪迹去除算法.实验表明:WT-EEMD-ICA算法有效地解决了单通道WT-ICA算法中的超完备问题,能够有效去除单通道脑电信号中的眼电伪迹,并且分离出的眼电伪迹成分与参考通道采集的眼电信号相关性较强.Abstract: Electrooculography (EOG) artifacts generated by eye movements and blinks are the major artifacts in electroencephalography (EEG). There are many common effective methods for removing the multi-channel EEG artifacts. However, due to the limitation of input channel number and the lack of reference EOG signal, there is no very effective artifact removing method for single-channel EEG signal. In the present study, a novel EOG artifact removing algorithm WT-EEMD-ICA for single-channel EEG signal is proposed based on wavelet transform (WT), ensemble empirical mode decomposition (EEMD) and independent component analysis (ICA) technologies. The result shows that the WT-EEMDICA method, which successfully solves the overcomplete problem of WT-ICA in single channel artifact removal, can separate the EOG and EEG successfully only from one single-channel EEG, and that the useful information involved in original EEG signal can be greatly saved.1) 本文责任编委 田捷
-
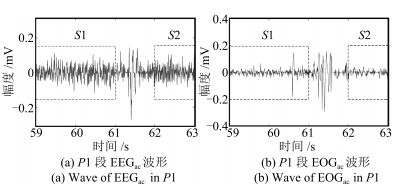
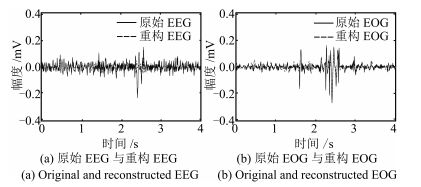
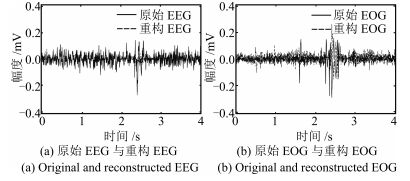
图 4 $P1$段EEG$_{\rm ac}$和EOG$_{\rm ac}$波形
Fig. 4 Wave of EEG$_{\rm ac}$和EOG$_{\rm ac}$ in $P1$
表 1 脑电分量与眼电分量近似熵对比
Table 1 Comparison of $ApEn$ between EEG and EOG
$ApEn$ 脑电分量 眼电分量 均值 1.35 0.55 标准差 0.26 0.23  下载: 导出CSV
下载: 导出CSV
表 2 重构信号与原始信号相关系数
Table 2 The correlation coefficients between reconstructed and original signal
对比算法 $S1$ $S2$ EOG WT-EEMDICA 0.82 0.74 0.54 WT 0.62 0.67 0.56 WT-ICA 0.54 0.59 0.57 EEMD-ICA 0.70 0.59 0.31 HHT 0.64 0.57 0.32
下载: 导出CSV
-
[1] Marker R J, Maluf K S. Effects of electrocardiography contamination and comparison of ECG removal methods on upper trapezius electromyography recordings. Journal of Electromyography and Kinesiology, 2014, 24(6):902-909 doi: 10.1016/j.jelekin.2014.08.003 [2] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群.下肢康复机器人及其交互控制方法.自动化学报, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtmlHu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and interactive control methods. Acta Automatica Sinica, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtml [3] Zeng H, Song A G, Yan R Q, Qin H Y. EOG artifact correction from EEG recording using stationary subspace analysis and empirical mode decomposition. Sensors, 2013, 13(11):14839-14859 doi: 10.3390/s131114839 [4] 王行愚, 金晶, 张宇, 王蓓.脑控:基于脑-机接口的人机融合控制.自动化学报, 2013, 39(3):208-221 http://www.aas.net.cn/CN/abstract/abstract17800.shtmlWang Xing-Yu, Jin Jing, Zhang Yu, Wang Bei. Brain control:human-computer integration control based on braincomputer interface. Acta Automatica Sinica, 2013, 39(3):208-221 http://www.aas.net.cn/CN/abstract/abstract17800.shtml [5] Jie D, Tao W, Zhang A T, Dai H Y. The removal of blink and saccade artifact in EEG recordings by independent component analysis. In:Proceedings of the 3rd International Conference on Biomedical Engineering and Informatics. Yantai, China:IEEE, 2010, 3:1071-1075 http://ieeexplore.ieee.org/xpl/tocresult.jsp?sortType%3Dasc_p_Sequence%26filter%3DAND%28p_IS_Number%3A5639235%29&pageNumber=3 [6] Daly I, Scherer R, Billinger M, Müller-Putz G. FORCe:fully online and automated artifact removal for brain-computer interfacing. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2015, 23(5):725-736 doi: 10.1109/TNSRE.2014.2346621 [7] Mannan M M N, Jeong M Y, Kamran M A. Hybrid ICAregression:automatic identification and removal of ocular artifacts from electroencephalographic signals. Frontiers in Human Neuroscience, 2016, 10:193-193 https://core.ac.uk/display/43879890 [8] Qi W. EOG artifacts removal in EEG measurements for affective interaction with brain computer interface. In:Proceedings of the 8th International Conference on Intelligent Information Hiding and Multimedia Signal Processing. Piraeus-Athens, Greece:IEEE, 2012. 471-475 [9] Chang W D, Cha H S, Kim K, Im C H. Detection of eye blink artifacts from single prefrontal channel electroencephalogram. Computer Methods and Programs in Biomedicine, 2016, 124:19-30 doi: 10.1016/j.cmpb.2015.10.011 [10] Vigon L, Saatchi M R, Mayhew J E W, Fernandes R. Quantitative evaluation of techniques for ocular artefact filtering of EEG waveforms. IEE Proceedings-Science Measurement and Technology, 2000, 147(5):219-229 doi: 10.1049/ip-smt:20000475 [11] Fatourechi M, Bashashatia A, Ward R K, Birch G E. EMG and EOG artifacts in brain computer interface systems:a survey. Clinical Neurophysiology, 2007, 118(3):480-494 doi: 10.1016/j.clinph.2006.10.019 [12] Gomez-Herrero G, Clercq W D, Anwar H, Kara O, Egiazarian K, van Huffel S, van Paesschen W. Automatic removal of ocular artifacts in the EEG without an EOG reference channel. In:Proceedings of the 7th Nordic Signal Processing Symposium. Reykjavik, Iceland:IEEE, 2006. 130-133 [13] 陈永强, 王宏霞.基于新型混合模型的欠定盲分离方法.自动化学报, 2014, 40(7):1412-1420 http://www.aas.net.cn/CN/abstract/abstract18412.shtmlChen Yong-Qiang, Wang Hong-Xia. A method for underdetermined blind source separation based on new mixture model. Acta Automatica Sinica, 2014, 40(7):1412-1420 http://www.aas.net.cn/CN/abstract/abstract18412.shtml [14] Jung T P, Makeig S, Westerfield M, Townsend J, Courchesne E, Sejnowski T J. Removal of eye activity artifacts from visual event-related potentials in normal and clinical subjects. Clinical Neurophysiology, 2000, 111(10):1745-1758 doi: 10.1016/S1388-2457(00)00386-2 [15] del R Millan J, Mourino J, Franze M, Cincotti F, Varsta M, Heikkonen J, Babiloni F. A local neural classifier for the recognition of EEG patterns associated to mental tasks. IEEE Transactions on Neural Networks, 2002, 13(3):678-686 doi: 10.1109/TNN.2002.1000132 [16] Croft R J, Barry R J. Removal of ocular artifact from the EEG:a review. Neurophysiologie Clinique, 2000, 30(1):5-19 doi: 10.1016/S0987-7053(00)00055-1 [17] Zhou W D, Gotman J. Removing eye-movement artifacts from the EEG during the intracarotid amobarbital procedure. Epilepsia, 2005, 46(3):409-414 doi: 10.1111/epi.2005.46.issue-3 [18] Sarossy M G, Lee M H A, Bach M. A fast automated method for calculating the EOG arden ratio. Documenta Ophthalmologica, 2014, 128(3):169-178 doi: 10.1007/s10633-014-9430-5 [19] 吴明权, 李海峰, 马琳.单通道脑电信号中眼电干扰的自动分离方法.电子与信息学报, 2015, 37(2):367-372 doi: 10.11999/JEIT140602Wu Ming-Quan, Li Hai-Feng, Ma Lin. Automatic electrooculogram separation method for single channel electroencephalogram signals. Journal of Electronics and Information Technology, 2015, 37(2):367-372 doi: 10.11999/JEIT140602 [20] James C J, Lowe D. Single channel analysis of electromagnetic brain signals through ICA in a dynamical systems framework. In:Proceedings of the 23rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Istanbul, Turkey:IEEE, 2001. 1974-1977 [21] Davies M E, James C J. Source separation using single channel ICA. Signal Processing, 2007, 87(8):1819-1832 doi: 10.1016/j.sigpro.2007.01.011 [22] Mammone N, La Foresta F, Morabito F C. Automatic artifact rejection from multichannel scalp EEG by wavelet ICA. IEEE Sensors Journal, 2012, 12(3):533-542 doi: 10.1109/JSEN.2011.2115236 [23] Wu Z H, Huang N E. Ensemble empirical mode decomposition:a noise-assisted data analysis method. Advances in Adaptive Data Analysis, 2009, 1(1):1-41 doi: 10.1142/S1793536909000047 [24] Tang Y, Li J P, Wu H. A simple and accurate ICA algorithm for separating mixtures of up to four independent components. Acta Automatica Sinica, 2011, 37(7):794-799 doi: 10.1016/S1874-1029(11)60210-3 [25] Li H Q, Feng X L, Cao L, Li E B, Liang H A, Chen X L. A new ECG signal classification based on WPD and ApEn feature extraction. Circuits Systems and Processing, 2016, 35(1):339-352 doi: 10.1007/s00034-015-0068-7 [26] Li M A, Yang L B, Yang J F. Separation of EOG artifacts from EEG signals using Hilbert-Huang transform. In:Proceedings of the 2011 International Conference on Electric Information and Control Engineering. Wuhan, China:IEEE, 2011. 4453-4456 -

 下载:
下载:














图(20) / 表(2)
计量
- 文章访问数: 2667
- HTML全文浏览量: 869
- PDF下载量: 961
- 被引次数: 0
