

A Multi-channel Decoupled Event Triggered Transmission Mechanism and Its Application to Optic-electric Sensor Network
-
摘要: 针对传感器网络融合估计中由能量受限引发的通信资源受限问题,提出了一种基于多通道解耦的事件触发量测传输机制.单独设计各传感器输出分量的事件触发条件并给出了估计算法误差有界性的条件,在保证融合估计精度的同时,可一定程度上降低传感器网络数据传输量.与现有三种方法的对比仿真结果以及火力控制系统中的光电传感网络实例,表明了所提算法的有效性和工程应用的可行性.
-
关键词:
- 集中式融合估计算法 /
- 多通道解耦事件触发机制 /
- 通信量频率 /
- 光电传感网络
Abstract: This paper deals with the problem of the communication constraint caused by energy limitation on the sensor network fusion system. We propose a multi-channel decoupled event-triggered measurement transmission mechanism which is based on the designed event-triggered condition for each output component of each sensor separately. Meanwhile we propose the condition which guarantees the boundary of the estimation error. The algorithm proposed in this article ensures the accuracy of the fusion system while the data transmitted is reduced at each time instant. The effectiveness and the feasibility of the proposed mechanism is verified through the optic-electric sensor network experiment in the fire control system and the simulation for comparison between our method and three other techniques.1) 本文责任编委 陈积明 -
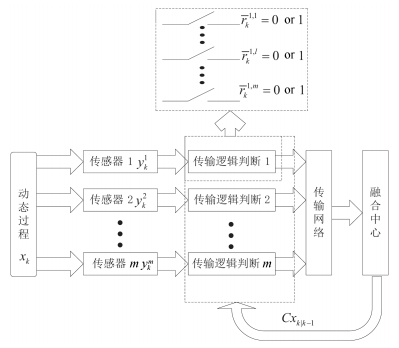
图 1 多通道解耦的事件触发估计算法
Fig. 1 The multi-channel decoupled event triggered estimation algorithm
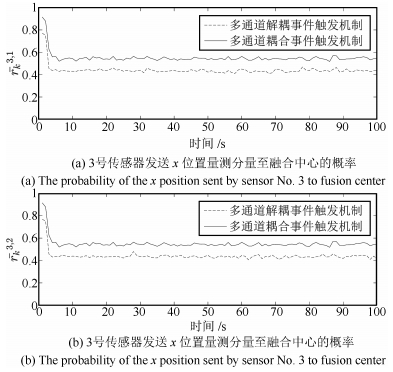
图 2 $\delta_{i}=30$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=15$ 时3号传感器发送x位置及y位置量测分量至融合中心的概率
Fig. 2 The probability of the x position and y position measurement sent by sensor No. 3 to fusion center per second when $\delta_{i}=30$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=15$
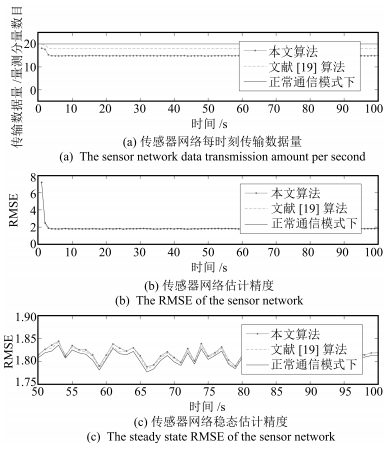
图 3 $\delta_{i}=6$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=3$ 时传感器网络每时刻传输数据量及对应估计精度
Fig. 3 The RMSE of the estimation of the network and its corresponding data transmission amount per second when $\delta_{i}=6$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=3$
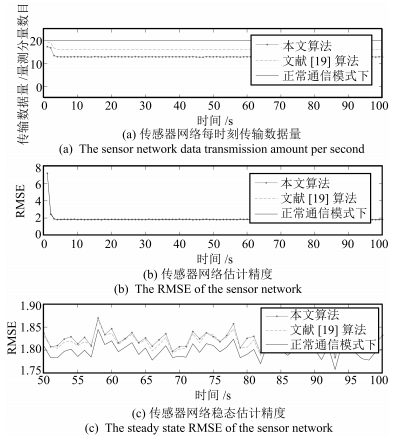
图 4 $\delta_{i}=12$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=6$ 时传感器网络每时刻传输数据量及对应估计精度
Fig. 4 The RMSE of the estimation of the network and its corresponding data transmission per second when $\delta_{i}=12$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=6$
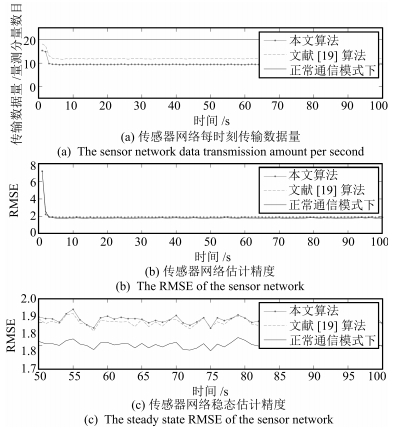
图 5 $\delta_{i}=30$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=15$ 时传感器网络每时刻传输数据量及对应估计精度
Fig. 5 The RMSE of the estimation of the network and its corresponding data transmission per second when $\delta_{i}=30$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=15$

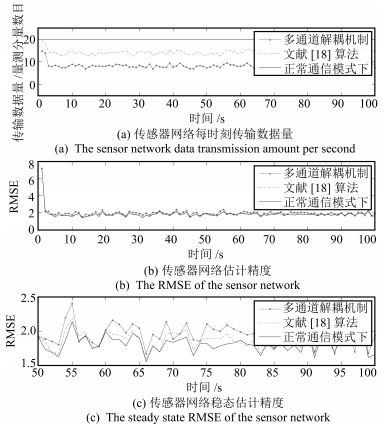

图 8 多通道解耦事件触发机制下的光电传感网络目标跟踪示意图
Fig. 8 The diagram of target tracking of the optic-electric sensor network with the multi-channel decoupled event triggered mechanism
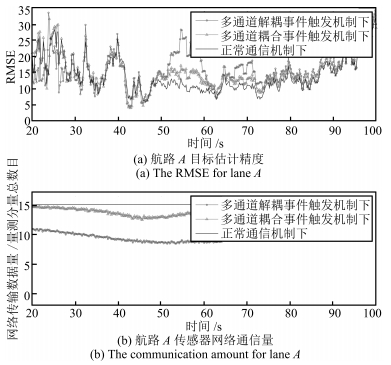
图 10 航路A三种通信机制下对目标估计精度及通信量
Fig. 10 The RMSE and communication amounts under three communication mechanism for lane A
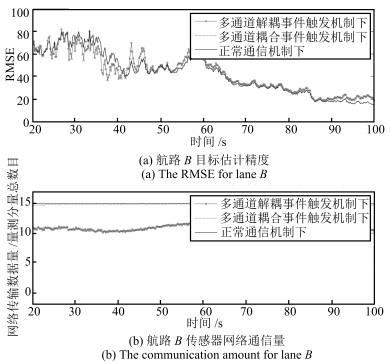
图 11 航路B三种通信机制下对目标估计精度及通信量
Fig. 11 The RMSE and communication amounts under three communication mechanism for lane B
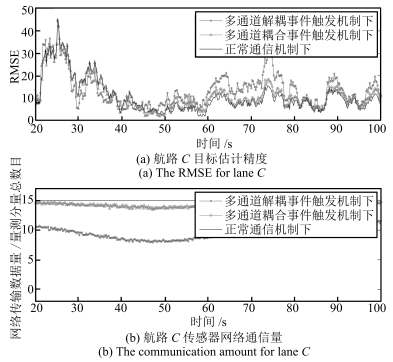
图 12 航路C三种通信机制下对目标估计精度及通信量
Fig. 12 The RMSE and communication amounts under three communication mechanism for lane C
表 1 $\delta_{i}=6$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=3$ 时通信量频率及 $RMSE_{av}$
Table 1 The data transmission amount rate and $RMSE_{av}$ when $\delta_{i}=6$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=3$ }
多通道解耦 多通道耦合 通信量频率 0.7500 0.8986 RMSEav 1.8733 1.8716  下载: 导出CSV
下载: 导出CSV
表 2 $\delta_{i}=12$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=6$ 时通信量频率及 $RMSE_{av}$
Table 2 The data transmission amount rate and $RMSE_{av}$ when $\delta_{i}=12$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=6$
多通道解耦 多通道耦合 通信量频率 0.6645 0.8091 RMSEav 1.8878 1.8845
下载: 导出CSV
表 3 $\delta_{i}=30$ , $\bar{\delta}_{i}^{1}=\bar{\delta}_{i}^{2}=15$ 时通信量频率及 $RMSE_{av}$
Table 3 The data transmission amount rate and $RMSE_{av}$ when $\delta_{i}=30$
多通道解耦 多通道耦合 通信量频率 0.4785 0.5987 RMSEav 1.9654 1.9608
下载: 导出CSV
表 4 火控系统空情信息核心数据发送协议
Table 4 The core data transmission protocol of the fire control system
x位置 x速度 y位置 y速度 z位置 z速度 字长 2字节 2字节 2字节 2字节 2字节 2字节
下载: 导出CSV
-
[1] 岳元龙, 左信, 罗雄麟.提高测量可靠性的多传感器数据融合有偏估计方法.自动化学报, 2014, 40(9):1843-1852 http://www.aas.net.cn/CN/abstract/abstract18453.shtmlYue Yuan-Long, Zuo Xin, Luo Xiong-Lin. Improving measurement reliability with biased estimation for multi-sensor data fusion. Acta Automatica Sinica, 2014, 40(9):1843-1852 http://www.aas.net.cn/CN/abstract/abstract18453.shtml [2] 薛东国, 陈博, 张文安, 俞立.通信受限下网络化多传感器系统的Kalman融合估计.自动化学报, 2015, 41(1):203-208 http://www.aas.net.cn/CN/abstract/abstract18599.shtmlXue Dong-Guo, Chen Bo, Zhang Wen-An, Yu Li. Kalman fusion estimation for networked multi-sensor fusion systems with communication constraints. Acta Automatica Sinica, 2015, 41(1):203-208 http://www.aas.net.cn/CN/abstract/abstract18599.shtml [3] 赵国荣, 韩旭, 卢建华.一种基于数据驱动传输策略的带宽受限的分布式融合估计器.自动化学报, 2015, 41(9):1649-1658 http://www.aas.net.cn/CN/abstract/abstract18738.shtmlZhao Guo-Rong, Han Xu, Lu Jian-Hua. A decentralized fusion estimator using data-driven communication strategy subject to bandwidth constraints. Acta Automatica Sinica, 2015, 41(9):1649-1658 http://www.aas.net.cn/CN/abstract/abstract18738.shtml [4] Cattivelli F S, Lopes C G, Sayed A H. Diffusion recursive least-squares for distributed estimation over adaptive networks. IEEE Transactions on Signal Processing, 2008, 56(5):1865-1877 doi: 10.1109/TSP.2007.913164 [5] Bokareva T, Hu W, Kanhere S, Ristic B, Gordon N, Bessell T, Rutten M, Jha S. Wireless sensor networks for battlefield surveillance. In:Proceedings of the 2006 Land Warfare Conference. Brisbane, Australia:APDR, 2006. 1-8 [6] Huo H W, Xu Y Z, Yan H R, Mubeen S, Zhang H K. An elderly health care system using wireless sensor networks at home. In:Proceedings of the 3rd International Conference on Sensor Technologies and Applications. Athens/Glyfada, Greece:IEEE, 2009. 158-163 http://ieeexplore.ieee.org/abstract/document/5210943/ [7] Santini S, Ostermaier B, Vitaletti A. First experiences using wireless sensor networks for noise pollution monitoring. In:Proceedings of the 3rd ACM Workshop on Real-World Wireless Sensor Networks. Glasgow, Scotland:ACM, 2008. 61-65 http://dl.acm.org/citation.cfm?id=1435490 [8] Gungor V C, Hancke G P. Industrial wireless sensor networks:challenges, design principles, and technical approaches. IEEE Transactions on Industrial Electronics, 2009, 56(10):4258-4265 doi: 10.1109/TIE.2009.2015754 [9] Gungor V C, Lu B, Hancke G P. Opportunities and challenges of wireless sensor networks in smart grid. IEEE Transactions on Industrial Electronics, 2010, 57(10):3557-3564 doi: 10.1109/TIE.2009.2039455 [10] Trimpe S, D'Andrea R. Event-based state estimation with variance-based triggering. IEEE Transactions on Automatic Control, 2014, 59(12):3266-3281 doi: 10.1109/TAC.2014.2351951 [11] Åström K J, Bernhardsson B M. Comparison of Riemann and Lebesgue sampling for first order stochastic systems. In:Proceedings of the 41st IEEE Conference on Decision and Control. Las Vegas, NV, USA:IEEE, 2002. 2011-2016 http://ieeexplore.ieee.org/abstract/document/1184824/ [12] Feeney L M, Nilsson M. Investigating the energy consumption of a wireless network interface in an ad hoc networking environment. In:Proceedings of the 20th Annual Joint Conference of the IEEE Computer and Communications Societies. Anchorage, Alaska, USA:IEEE, 2001. 1548-1557 http://ieeexplore.ieee.org/abstract/document/916651/ [13] Shnayder V, Hempstead M, Chen B, Allen G W, Welsh M. Simulating the power consumption of large-scale sensor network applications. In:Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems. Baltimore, Maryland, USA:ACM, 2004. 188-200 http://dl.acm.org/citation.cfm?id=1031518 [14] Imer O C, Basar T. Optimal estimation with limited measurements. In:Proceedings of the 44th IEEE Conference on Decision and Control. Seville, Spain:IEEE, 2005. 1029-1034 http://ieeexplore.ieee.org/abstract/document/1582293/ [15] Rabi M, Moustakides G V, Baras J S. Multiple sampling for estimation on a finite horizon. In:Proceedings of the 45th IEEE Conference on Decision and Control. San Diego, USA:IEEE, 2006. 1351-1357 http://ieeexplore.ieee.org/abstract/document/4178072/ [16] Li L C, Lemmon M, Wang X F. Event-triggered state estimation in vector linear processes. In:Proceedings of the 2010 American Control Conference. Baltimore, Maryland, USA:IEEE, 2010. 2138-2143 http://ieeexplore.ieee.org/abstract/document/5531338/ [17] Wu J F, Jia Q S, Johansson K H, Shi L. Event-based sensor data scheduling:trade-off between communication rate and estimation quality. IEEE Transactions on Automatic Control, 2013, 58(4):1041-1046 doi: 10.1109/TAC.2012.2215253 [18] Shi D W, Chen T W, Shi L. An event-triggered approach to state estimation with multiple point-and set-valued measurements. Automatica, 2014, 50(6):1641-1648 doi: 10.1016/j.automatica.2014.04.004 [19] Battistelli G, Benavoli A, Chisci L. Data-driven communication for state estimation with sensor networks. Automatica, 2012, 48(5):926-935 doi: 10.1016/j.automatica.2012.02.028 [20] Anderson B D O, Moore J B. Detectability and stabilizability of time-varying discrete-time linear systems. SIAM Journal on Control and Optimization, 1981, 19(1):20-32 doi: 10.1137/0319002 [21] Duan Z S, Han C Z, Li X R. Comments on "unbiased converted measurements for tracking". IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(4):1374-1377 doi: 10.1109/TAES.2004.1386889 -

 下载:
下载:


计量
- 文章访问数: 2861
- HTML全文浏览量: 285
- PDF下载量: 823
- 被引次数: 0
